Спосіб підняття затонулого об’єкта і пристрій для його здійснення
Номер патенту: 56844
Опубліковано: 15.05.2003
Автори: Галь Анатолій Феодосійович, Колодченко Юрій Володимирович, Бугаєнко Борис Андрійович
Формула / Реферат
1. Спосіб підняття затонулого об'єкта, що полягає у забезпеченні піднімальної сили модулями плавучості й у примусовому заглибленні модуля плавучості під дією сили ваги вантажа-заглиблювача по направляючому тросу, що приєднується до затонулого об'єкта і пропускається через наскрізні отвори модулів плавучості і вантажа-заглиблювача, який відрізняється тим, що вантажу-заглиблювачу додають додаткову швидкість руху за допомогою рушіїв.
2. Спосіб за п. 1, який відрізняється тим, що вантаж-заглиблювач піднімають до плавучого засобу шляхом реверсування рушіями.
3. Пристрій для здійснення способу за пп. 1 і 2, що містить спуско-поднімальний пристрій у вигляді лебідки, який розташовано на плавучому засобі і зв'язано з затонулим об'єктом направляючим тросом, що пропущений через наскрізні отвори вантажа-заглиблювача і модуля плавучості, який відрізняється тим, що вантаж-заглиблювач оснащений водометними рушіями, кожний з яких являє собою водометну трубу з направляючими соплами і робочим колесом, що знаходиться усередині, і зв'язаним за допомогою гребного вала через редуктор з електродвигуном, причому останній з'єднаний кабелем-тросом з джерелом електроживлення на плавучому засобі.
4. Пристрій за п. 3, який відрізняється тим, що направляючий трос розташовано усередині наскрізних отворів пропускних елементів, виконаних, наприклад, у вигляді кілець.
5. Пристрій за пп. 3 і 4, який відрізняється тим, що рушії розташовані рівномірно навколо вантажа-заглиблювача.
6. Пристрій за пп. 3, 4 і 5, який відрізняється тим, що водометний рушій оснащений поворотною щодо відбивача пластиною, з'єднаною з приводом, наприклад, у вигляді електродвигуна, з'єднаного кабелем-тросом із джерелом електроживлення і системою керування на плавучому засобі.
Текст
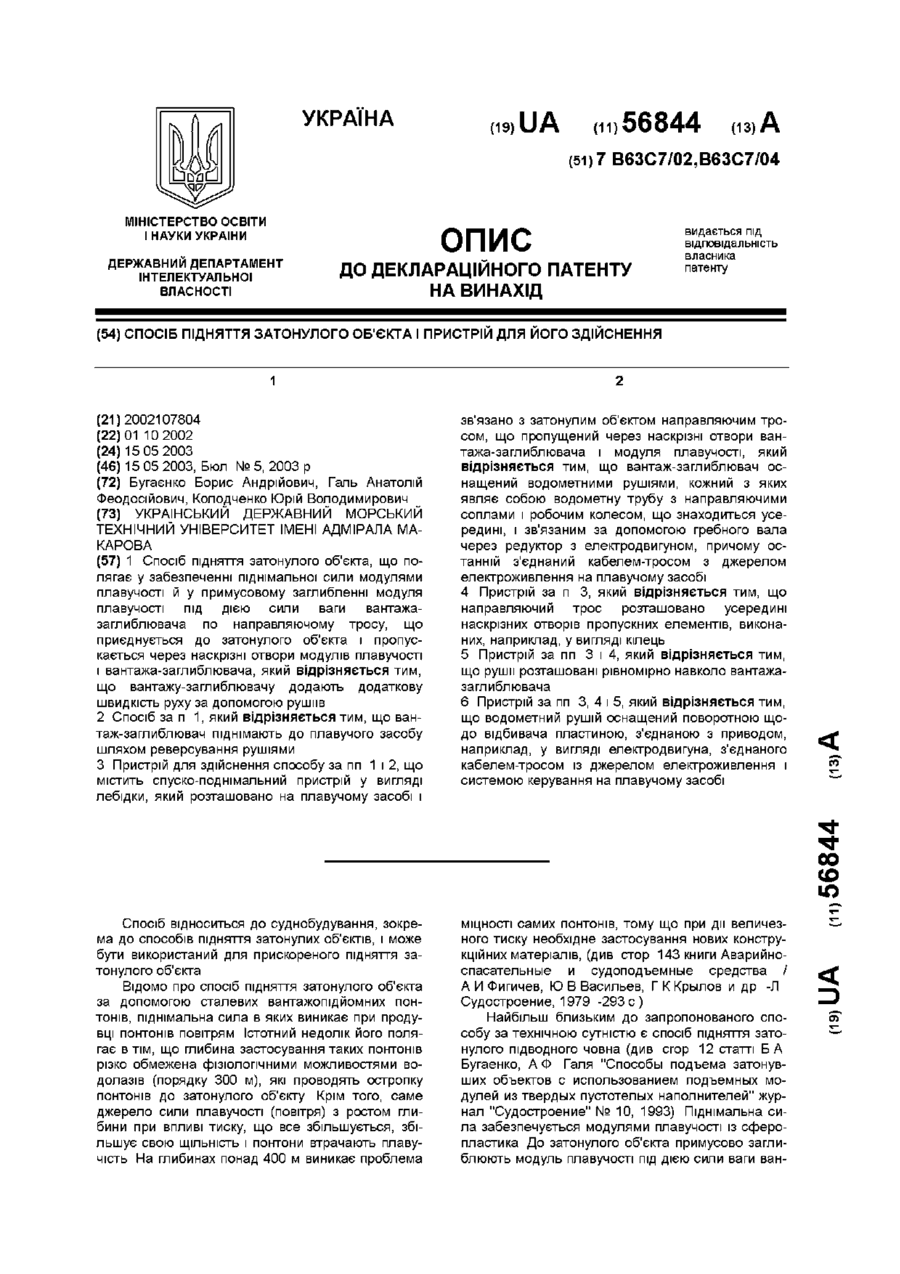
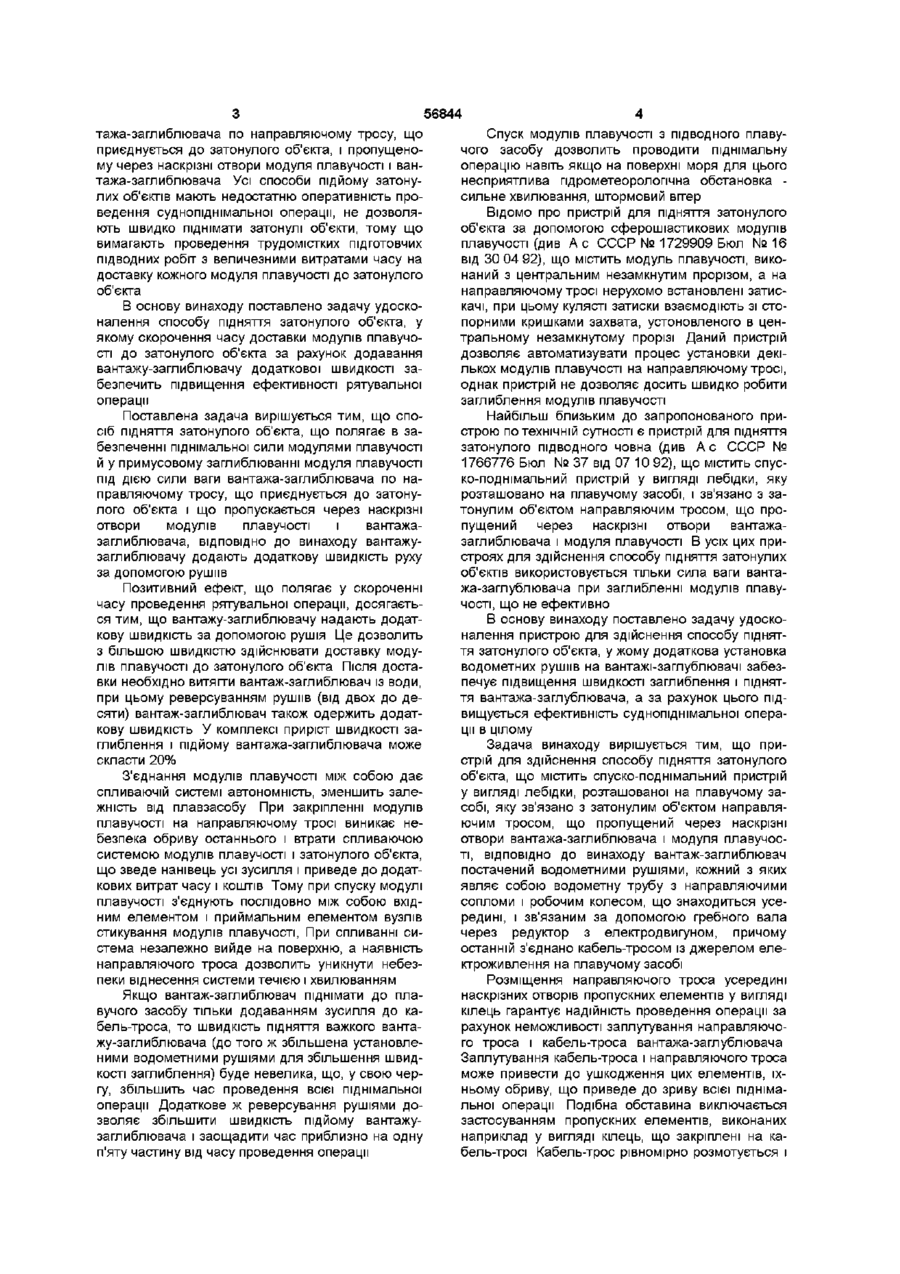
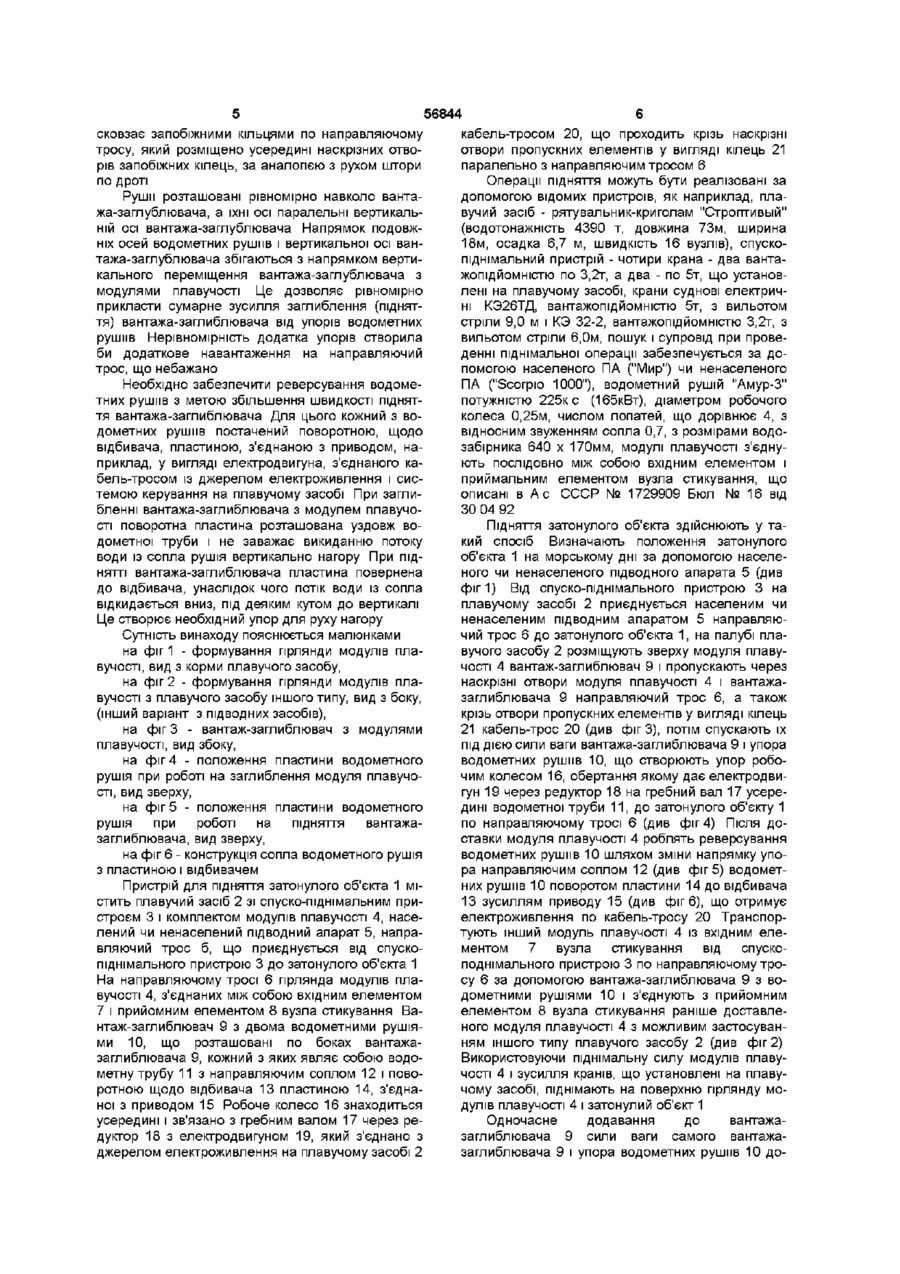
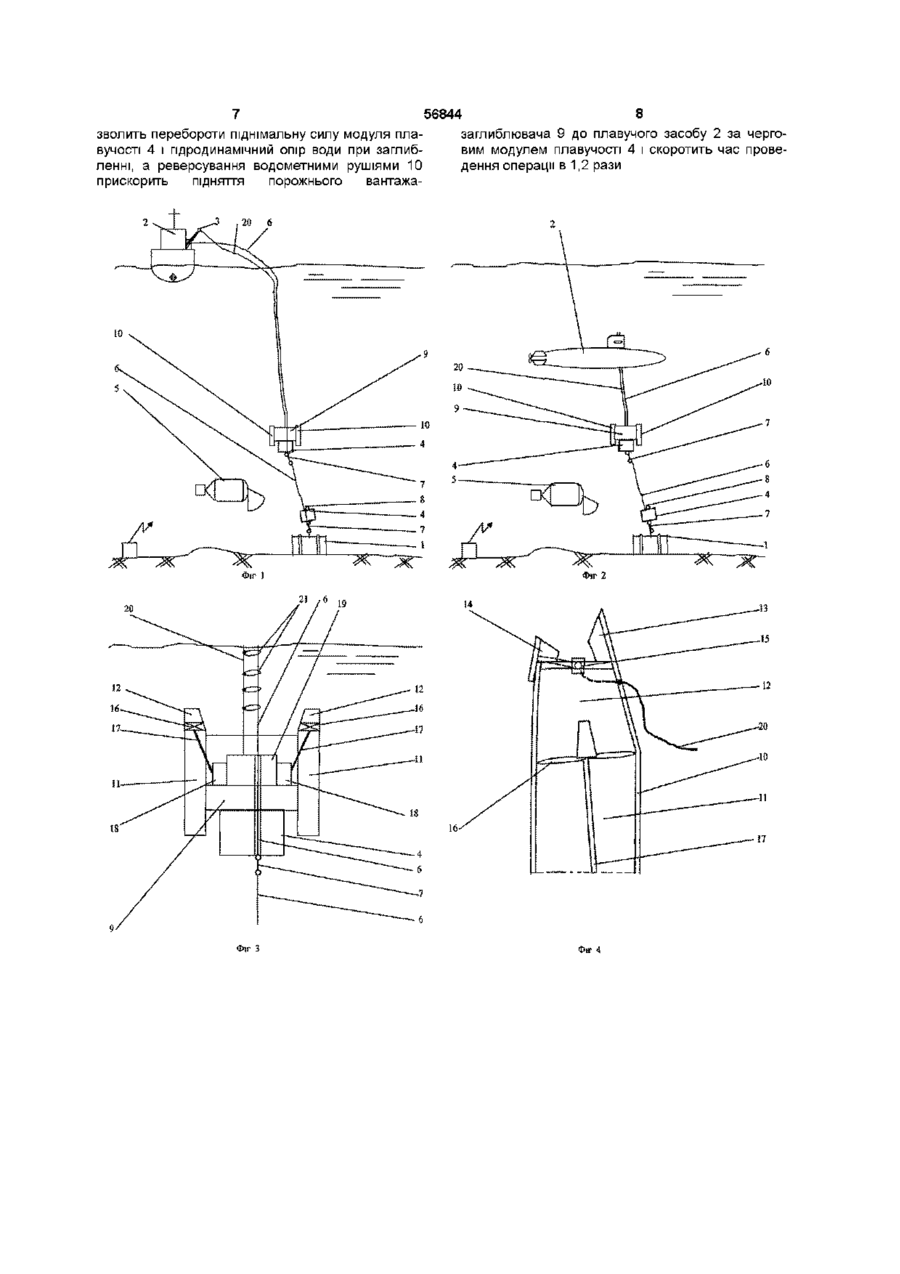
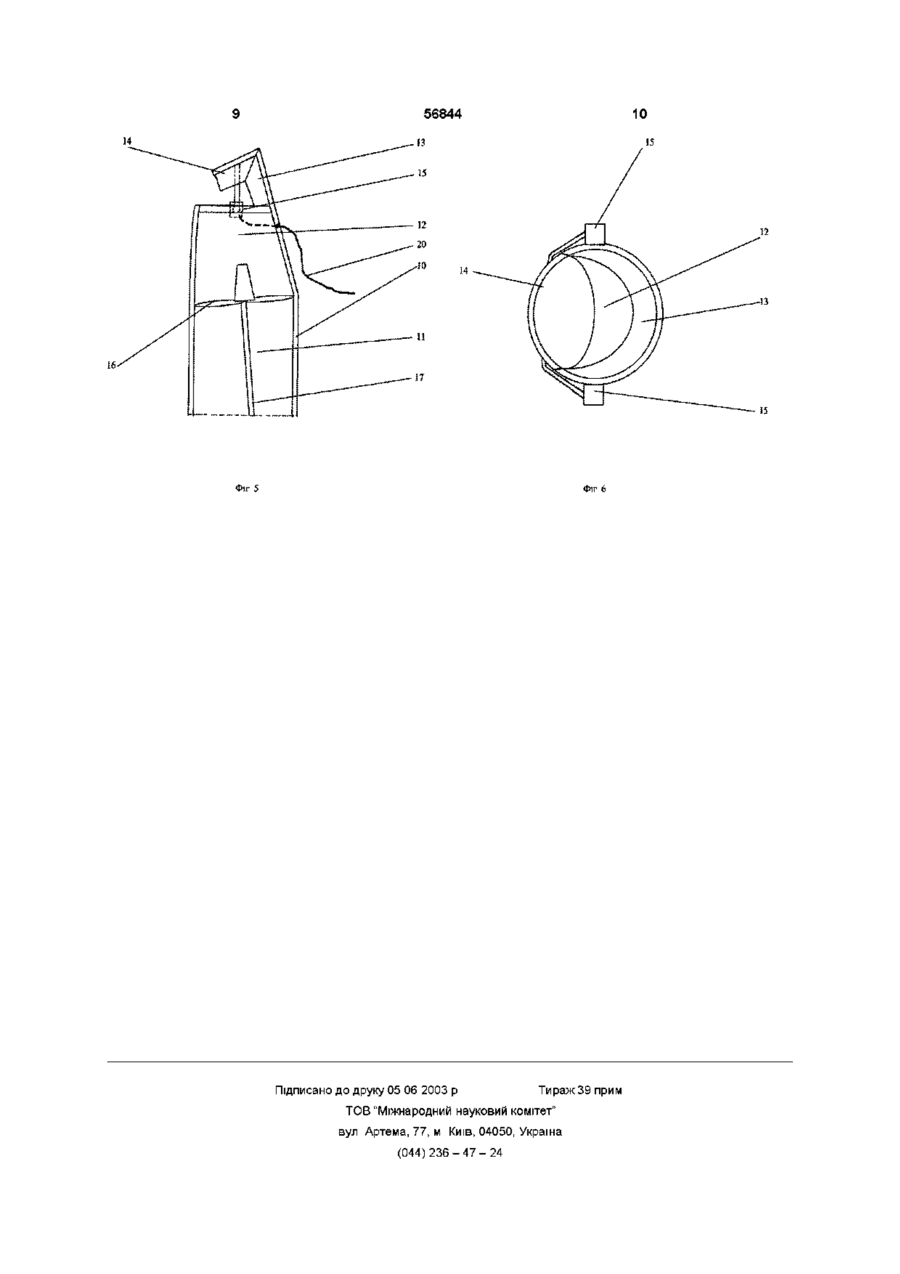
1 Спосіб підняття затонулого об'єісга, що полягає у забезпеченні піднімальної сили модулями плавучості й у примусовому заглибленні модуля плавучості під дією сили ваги вантажазаглиблювача по направляючому тросу, що приєднується до затонулого об'єісга і пропускається через наскрізні отвори модулів плавучості і вантажа-заглиблювача, який відрізняється тим, що вантажу-заглиблювачу додають додаткову швидкість руху за допомогою рушив 2 Спосіб за п 1, який відрізняється тим, що вантаж-заглиблювач піднімають до плавучого засобу шляхом реверсування рушіями 3 Пристрій для здійснення способу за пп 1 і 2, що містить спуско-поднімальний пристрій у вигляді лебідки, який розташовано на плавучому засобі і зв'язано з затонулим об'єктом направляючим тросом, що пропущений через наскрізні отвори вантажа-заглиблювача і модуля плавучості, який відрізняється тим, що вантаж-заглиблювач оснащений водометними рушіями, кожний з яких являє собою водометну трубу з направляючими соплами і робочим колесом, що знаходиться усередині, і зв'язаним за допомогою гребного вала через редуктор з електродвигуном, причому останній з'єднаний кабелем-тросом з джерелом електроживлення на плавучому засобі 4 Пристрій за п 3, який відрізняється тим, що направляючий трос розташовано усередині наскрізних отворів пропускних елементів, виконаних, наприклад, у вигляді кілець 5 Пристрій за пп З і 4, який відрізняється тим, що рушії розташовані рівномірно навколо вантажазаглиблювача 6 Пристрій за пп 3, 4 і 5, який відрізняється тим, що водометний рушій оснащений поворотною щодо відбивача пластиною, з'єднаною з приводом, наприклад, у вигляді електродвигуна, з'єднаного кабелем-тросом із джерелом електроживлення і системою керування на плавучому засобі 00 (О ю Спосіб відноситься до суднобудування, зокрема до способів підняття затонулих об'єктів, і може бути використаний для прискореного підняття затонулого об'єкта Відомо про спосіб підняття затонулого об'єкта за допомогою сталевих вантажопідйомних понтонів, піднімальна сила в яких виникає при продувці понтонів повітрям Істотний недолік його полягає в тім, що глибина застосування таких понтонів різко обмежена фізіологічними можливостями водолазів (порядку 300 м), які проводять остропку понтонів до затонулого об'єкту Крім того, саме джерело сили плавучості (повітря) з ростом глибини при впливі тиску, що все збільшується, збільшує свою ЩІЛЬНІСТЬ і понтони втрачають плавучість На глибинах понад 400 м виникає проблема МІЦНОСТІ самих понтонів, тому що при дії величезного тиску необхідне застосування нових конструкційних матеріалів, (див стор 143 книги Аварийноспасательные и судоподъемные средства / А И Фигичев, Ю В Васильев, Г К Крылов и др -Л Судостроение, 1979 -293 с ) Найбільш близьким до запропонованого способу за технічною сутністю є спосіб підняття затонулого підводного човна (див crop 12 статті БА Бугаєнко, А Ф Галя "Способы подъема затонувших объектов с использованием подъемных модулей из твердых пустотелых наполнителей" журнал "Судостроение" № 10, 1993) Піднімальна сила забезпечується модулями плавучості із сферопластика До затонулого об'єкта примусово заглиблюють модуль плавучості під дією сили ваги ван 56844 тажа-заглиблювача по направляючому тросу, що приєднується до затонулого об'єісга, і пропущеному через наскрізні отвори модуля плавучості і вантажа-заглиблювача Усі способи підйому затонулих об'єктів мають недостатню оперативність проведення суднопіднімальної операції, не дозволяють швидко піднімати затонулі об'єкти, тому що вимагають проведення трудомістких підготовчих підводних робіт з величезними витратами часу на доставку кожного модуля плавучості до затонулого об'єкта В основу винаходу поставлено задачу удосконалення способу підняття затонулого об'єкта, у якому скорочення часу доставки модулів плавучості до затонулого об'єкта за рахунок додавання вантажу-заглиблювачу додаткової швидкості забезпечить підвищення ефективності рятувальної операції Поставлена задача вирішується тим, що спосіб підняття затонулого об'єкта, що полягає в забезпеченні піднімальної сили модулями плавучості й у примусовому заглиблюванні модуля плавучості під дією сили ваги вантажа-заглиблювача по направляючому тросу, що приєднується до затонулого об'єкта і що пропускається через наскрізні отвори модулів плавучості і вантажазаглиблювача, ВІДПОВІДНО до винаходу вантажузаглиблювачу додають додаткову швидкість руху за допомогою рушив Позитивний ефект, що полягає у скороченні часу проведення рятувальної операції, досягається тим, що вантажу-заглиблювачу надають додаткову швидкість за допомогою рушія Це дозволить з більшою швидкістю здійснювати доставку модулів плавучості до затонулого об'єкта Після доставки необхідно витягти вантаж-заглиблювач із води, при цьому реверсуванням рушив (від двох до десяти) вантаж-заглиблювач також одержить додаткову швидкість У комплексі приріст швидкості заглиблення і підйому вантажа-заглиблювача може скласти 20% З'єднання модулів плавучості між собою дає спливаючій системі автономність, зменшить залежність від плавзасобу При закріпленні модулів плавучості на направляючому тросі виникає небезпека обриву останнього і втрати спливаючою системою модулів плавучості і затонулого об'єкта, що зведе нанівець усі зусилля і приведе до додаткових витрат часу і коштів Тому при спуску модулі плавучості з'єднують послідовно між собою вхідним елементом і приймальним елементом вузлів стикування модулів плавучості, При спливанні система незалежно вийде на поверхню, а наявність направляючого троса дозволить уникнути небезпеки віднесення системи течією і хвилюванням Якщо вантаж-заглиблювач піднімати до плавучого засобу тільки додаванням зусилля до кабель-троса, то швидкість підняття важкого вантажу-заглиблювача (до того ж збільшена установленими водометними рушіями для збільшення швидкості заглиблення) буде невелика, що, у свою чергу, збільшить час проведення всієї піднімальної операції Додаткове ж реверсування рушіями дозволяє збільшити швидкість підйому вантажузаглиблювача і заощадити час приблизно на одну п'яту частину від часу проведення операції Спуск модулів плавучості з підводного плавучого засобу дозволить проводити піднімальну операцію навіть якщо на поверхні моря для цього несприятлива гідрометеорологічна обстановка сильне хвилювання, штормовий вітер Відомо про пристрій для підняття затонулого об'єкта за допомогою сферошіастикових модулів плавучості (див А с СССР № 1729909 Бюл № 16 від ЗО 04 92), що містить модуль плавучості, виконаний з центральним незамкнутим прорізом, а на направляючому тросі нерухомо встановлені затискачі, при цьому кулясті затиски взаємодіють зі стопорними кришками захвата, установленого в центральному незамкнутому прорізі Даний пристрій дозволяє автоматизувати процес установки декількох модулів плавучості на направляючому тросі, однак пристрій не дозволяє досить швидко робити заглиблення модулів плавучості Найбільш близьким до запропонованого пристрою по технічній сутності є пристрій для підняття затонулого підводного човна (див А с СССР № 1766776 Бюл № 37 від 07 10 92), що містить спуско-поднімальний пристрій у вигляді лебідки, яку розташовано на плавучому засобі, і зв'язано з затонулим об'єктом направляючим тросом, що пропущений через наскрізні отвори вантажазаглиблювача і модуля плавучості В усіх цих пристроях для здійснення способу підняття затонулих об'єктів використовується тільки сила ваги вантажа-заглублювача при заглибленні модулів плавучості, що не ефективно В основу винаходу поставлено задачу удосконалення пристрою для здійснення способу підняття затонулого об'єкта, у жому додаткова установка водометних рушив на вантажі-заглублювачі забезпечує підвищення швидкості заглиблення і підняття вантажа-заглублювача, а за рахунок цього підвищується ефективність суднопіднімальної операції в цілому Задача винаходу вирішується тим, що пристрій для здійснення способу підняття затонулого об'єкта, що містить спуско-поднімальний пристрій у вигляді лебідки, розташованої на плавучому засобі, яку зв'язано з затонулим об'єктом направляючим тросом, що пропущений через наскрізні отвори вантажа-заглиблювача і модуля плавучості, ВІДПОВІДНО до винаходу вантаж-заглиблювач постачений водометними рушіями, кожний з яких являє собою водометну трубу з направляючими сопломи і робочим колесом, що знаходиться усередині, і зв'язаним за допомогою гребного вала через редуктор з електродвигуном, причому останній з'єднано кабель-тросом із джерелом електроживлення на плавучому засобі Розміщення направляючого троса усередині наскрізних отворів пропускних елементів у вигляді кілець гарантує надійність проведення операції за рахунок неможливості заплутування направляючого троса і кабель-троса вантажа-заглублювача Заплутування кабель-троса і направляючого троса може привести до ушкодження цих елементів, їхньому обриву, що приведе до зриву всієї піднімальної операції Подібна обставина виключається застосуванням пропускних елементів, виконаних наприклад у вигляді кілець, що закріплені на кабель-тросі Кабель-трос рівномірно розмотується і 56844 сковзає запобіжними кільцями по направляючому кабель-тросом 20, що проходить крізь наскрізні тросу, який розміщено усередині наскрізних отвоотвори пропускних елементів у вигляді кілець 21 рів запобіжних кілець, за аналогією з рухом штори паралельно з направляючим тросом 6 по дроті Операції підняття можуть бути реалізовані за допомогою відомих пристроїв, як наприклад, плаРушії розташовані рівномірно навколо вантавучий засіб - рятувальник-криголам "Строптивый" жа-заглублювача, а їхні осі паралельні вертикаль(водотонажність 4390 т, довжина 73м, ширина ній осі вантажа-заглублювача Напрямок подовж18м, осадка 6,7 м, швидкість 16 вузлів), спусконіх осей водометних рушив і вертикальної осі ванпіднімальний пристрій - чотири крана - два вантатажа-заглублювача збігаються з напрямком вертижопідйомністю по 3,2т, а два - по 5т, що установкального переміщення вантажа-заглублювача з лені на плавучому засобі, крани суднові електричмодулями плавучості Це дозволяє рівномірно ні КЭ26ТД, вантажопідйомністю 5т, з вильотом прикласти сумарне зусилля заглиблення (піднятстріли 9,0 м і КЭ 32-2, вантажопідйомністю 3,2т, з тя) вантажа-заглиблювача від упорів водометних вильотом стріли 6,0м, пошук і супровід при проверушив Нерівномірність додатка упорів створила денні піднімальної операції забезпечується за доби додаткове навантаження на направляючий помогою населеного ПА ("Мир") чи ненаселеного трос, що небажано ПА ("Scorpio 1000"), водометний рушій "Амур-3" Необхідно забезпечити реверсування водомепотужністю 225к с (165кВт), діаметром робочого тних рушив з метою збільшення швидкості піднятколеса 0,25м, числом лопатей, що дорівнює 4, з тя вантажа-заглиблювача Для цього кожний з вовідносним звуженням сопла 0,7, з розмірами вододометних рушив постачений поворотною, щодо забірника 640 х 170мм, модулі плавучості з'єднувідбивача, пластиною, з'єднаною з приводом, нають послідовно між собою вхідним елементом і приклад, у вигляді електродвигуна, з'єднаного каприймальним елементом вузла стикування, що бель-тросом із джерелом електроживлення і сисописані в Ас СССР № 1729909 Бюл № 16 від темою керування на плавучому засобі При заглиЗО 04 92 бленні вантажа-заглиблювача з модулем плавучості поворотна пластина розташована уздовж воПідняття затонулого об'єкта здійснюють у тадометної труби і не заважає викиданню потоку кий спосіб Визначають положення затонулого води із сопла рушія вертикально нагору При ПІДоб'єкта 1 на морському дні за допомогою населеНЯТТІ вантажа-заглиблювача пластина повернена ного чи ненаселеного підводного апарата 5 (див до відбивача, унаслідок чого потік води із сопла фіг 1) Від спуско-піднімального пристрою 3 на відкидається вниз, під деяким кутом до вертикалі плавучому засобі 2 приєднується населеним чи Це створює необхідний упор для руху нагору ненаселеним підводним апаратом 5 направляючий трос 6 до затонулого об'єкта 1, на палубі плаСутність винаходу пояснюється малюнками вучого засобу 2 розміщують зверху модуля плавуна фіг 1 - формування гірлянди модулів плачості 4 вантаж-заглиблювач 9 і пропускають через вучості, вид з корми плавучого засобу, наскрізні отвори модуля плавучості 4 і вантажана фіг 2 - формування гірлянди модулів плазаглиблювача 9 направляючий трос 6, а також вучості з плавучого засобу іншого типу, вид з боку, крізь отвори пропускних елементів у вигляді кілець (інший варіант з підводних засобів), 21 кабель-трос 20 (див фігЗ), потім спускають їх на фіг 3 - вантаж-заглиблювач з модулями під дією сили ваги вантажа-заглиблювача 9 і упора плавучості, вид збоку, водометних рушив 10, що створюють упор робона фіг 4 - положення пластини водометного чим колесом 16, обертання якому дає електродвирушія при роботі на заглиблення модуля плавучогун 19 через редуктор 18 на гребний вал 17 усересті, вид зверху, дині водометної труби 11, до затонулого об'єкту 1 на фіг 5 - положення пластини водометного по направляючому тросі 6 (див фіг 4) Після дорушія при роботі на підняття вантажаставки модуля плавучості 4 роблять реверсування заглиблювача, вид зверху, водометних рушив 10 шляхом зміни напрямку упона фіг 6 - конструкція сопла водометного рушія ра направляючим соплом 12 (див фіг 5) водометз пластиною і відбивачем них рушив 10 поворотом пластини 14 до відбивача Пристрій для підняття затонулого об'єкта 1 мі13 зусиллям приводу 15 (див фіг 6), що отримує стить плавучий засіб 2 зі спуско-піднімальним приелектроживлення по кабель-тросу 20 Транспорстроєм 3 і комплектом модулів плавучості 4, насетують інший модуль плавучості 4 із вхідним елелений чи ненаселений підводний апарат 5, напраментом 7 вузла стикування від спусковляючий трос б, що приєднується від спускоподнімального пристрою 3 по направляючому тропіднімального пристрою 3 до затонулого об'єкта 1 су 6 за допомогою вантажа-заглиблювача 9 з воНа направляючому тросі 6 гірлянда модулів пладометними рушіями 10 і з'єднують з прийомним вучості 4, з'єднаних між собою вхідним елементом елементом 8 вузла стикування раніше доставле7 і прийомним елементом 8 вузла стикування Ваного модуля плавучості 4 з можливим застосуваннтаж-заглиблювач 9 з двома водометними рушіяням іншого типу плавучого засобу 2 (див фіг 2) ми 10, що розташовані по боках вантажаВикористовуючи піднімальну силу модулів плавузаглиблювача 9, кожний з яких являє собою водочості 4 і зусилля кранів, що установлені на плавуметну трубу 11 з направляючим соплом 12 і повочому засобі, піднімають на поверхню гірлянду моротною щодо відбивача 13 пластиною 14, з'єднадулів плавучості 4 і затонулий об'єкт 1 ної з приводом 15 Робоче колесо 16 знаходиться усередині і зв'язано з гребним валом 17 через реОдночасне додавання до вантажадуктор 18 з електродвигуном 19, який з'єднано з заглиблювача 9 сили ваги самого вантажаджерелом електроживлення на плавучому засобі 2 заглиблювача 9 і упора водометних рушив 10 до 56844 ЗБОЛИТЬ перебороти піднімальну силу модуля плавучості 4 і гідродинамічний опір води при заглибленні, а реверсування водометними рушіями 10 прискорить підняття порожнього вантажа чг З 8 заглиблювача 9 до плавучого засобу 2 за черговим модулем плавучості 4 і скоротить час проведення операції в 1,2 рази Фіг 56844 10 Фіг 5 Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for lifting a sunk object and appliance for its implementation
Автори англійськоюBuhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych
Назва патенту російськоюСпособ подъема затонувшего объекта и устройство для его осуществления
Автори російськоюБугаенко Борис Андреевич, Галь Анатолий Феодосьевич
МПК / Мітки
Мітки: спосіб, пристрій, здійснення, підняття, об'єкта, затонулого
Код посилання
<a href="https://ua.patents.su/5-56844-sposib-pidnyattya-zatonulogo-obehkta-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб підняття затонулого об’єкта і пристрій для його здійснення</a>
Спосіб відстикування рятувальної камери затонулого підводного човна
Номер патенту: 50627
Опубліковано: 15.10.2002
Автори: Галь Анатолій Феодосійович, Колодченко Юрій Володимирович, Бугаєнко Борис Андрійович
Мітки: підводного, човна, камери, затонулого, рятувальної, спосіб, відстикування
Формула / Реферат:
Спосіб відстикування рятувальної камери затонулого підводного човна, що полягає в розкритті кремальєрного пристрою з пневмогідравлічним приводом, в спрацьовуванні резервних засобів для забезпечення виштовхування рятувальної камери затонулого підводного човна при заклинюванні стикувального вузла, який відрізняється тим, що оперативно направляють до місця знаходження затонулого підводного човна судно-рятувальник зі спуско-піднімальним пристроєм...
Спосіб підняття затонулих об’єктів
Номер патенту: 47323
Опубліковано: 17.06.2002
Автори: Колодченко Юрій Володимирович, Галь Анатолій Феодосійович, Бугаєнко Борис Андрійович
Мітки: спосіб, підняття, затонулих, об'єктів
Формула / Реферат:
1. Спосіб підняття затонулих об'єктів, що полягає в установленні гідроакустичних маяків на дні моря, опусканні захвату в розкритому положенні і наведенні його на затонулий об'єкт, зведенні елементів захвату на затонулому об'єкті, приєднанні до захвату напрямного троса, проведенні напрямного троса через наскрізні отвори модуля плавучості і наскрізні отвори вантажа-заглиблювача, формуванні гірлянди модулів плавучості, спільному спуску модуля...
Спосіб підняття об’єкта, що знаходиться під водою, та підйомний засіб для його здійснення
Номер патенту: 42430
Опубліковано: 15.10.2001
Автор: Міндолін Сергій Олександрович
МПК: B63C 7/06
Мітки: здійснення, знаходиться, спосіб, засіб, підняття, підйомний, об'єкта, водою
Формула / Реферат:
1. Спосіб підняття об'єкта, що знаходиться під водою, який включає створення підйомної сили за допомогою підйомної системи, яка складається з підйомного засобу, з'єднаного з об'єктом, що піднімається, не менше як одним силовим зв'язком, який відрізняється тим, що до початку підйому корпус підйомного засобу розташовують відчиненим боком вниз і з нього витискують воду, а після відриву об'єкта від дна корпус підйомного засобу розвертають...
Спосіб підняття затонулого об’єкта
Номер патенту: 17520
Опубліковано: 06.05.1997
Автори: Галь Анатолій Феодосійович, Снігур Анатолій Кирилович, Бугаєнко Борис Андрійович
Мітки: спосіб, об'єкта, затонулого, підняття
Формула / Реферат:
Способ подъема затонувшего объекта, заключающийся в приложении к последнему подъемно-тягового усилия за счет выборки тягового каната с захватом, который опускают с самоходного надводного плавсредства при помощи спуско-подъемного устройства, на лебедке которого закреплен один конец упомянутого тягового каната, другой конец которого пропущен через обводной блок захвата и закреплен, отличающийся тем, что при опускании захвата используют также...
Спосіб підйому затонулого корабля і пристрій для його реалізації
Номер патенту: 39055
Опубліковано: 15.05.2001
Автори: Бондаренко Євген Валентинович, Тимофеев Микола Іванович, Лівінський Олександр Михайлович
МПК: G01M 19/00, B63C 7/00
Мітки: пристрій, затонулого, реалізації, спосіб, підйому, корабля
Формула / Реферат:
1. Спосіб підйому затонулого корабля, що включає, кріплення зв'язків, захоплювачів, трубопроводів, резервуарів, заповнення їх газом, з використанням виштовхуючої сили, який відрізняється тим, що спочатку заповнену водою систему резервуарів опускають і закріпляють до правого кінця з подальшою відкачкою води і заповненням газом, а потім заповнену водою систему опускають і закріпляють до лівого кінця, з подальшою відкачкою води і заповненням...
Попередній патент: Спосіб визначення працездатності тришарошкового долота на вибої свердловини
Наступний патент: Зварювальний трансформатор
Випадковий патент: Пристрій для дезінтеграції гірських порід