Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів
Номер патенту: 42582
Опубліковано: 10.07.2009
Автори: Урдін Ігор Володимирович, Воробейчик Олег Станіславович, Козакевич Ігор Аркадійович, Топчієнко Юрій Анатолійович




Формула / Реферат
Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів, що включає реєстрацію реально діючих в асинхронному двигуні сигналів й обчислення по розрахункових формулах параметрів асинхронного двигуна, який відрізняється тим, що реєстрацію реально діючих в асинхронному двигуні сигналів здійснюють у режимах його робочого функціонування з наступною обробкою сигналів; при цьому як реально діючі в асинхронному двигуні сигнали використовують миттєві значення фазних струмів для 4-х послідовних інтервалів виміру, миттєві значення фазних або лінійних напруг для 4-х послідовних інтервалів виміру й частоту обертання вала машини (один вимір при стабільній швидкості або чотири - при нестабільній), а як параметри асинхронних двигунів - активні опори статора й ротора, власні індуктивності статора й ротора і їхню взаємну індуктивність; причому обчислення параметрів асинхронного двигуна виконують по формулах:
 ,(1)
,(1)
де ![]() , а С знаходять із k38C4+k39C3+k40C2+k41C+k42=0,
, а С знаходять із k38C4+k39C3+k40C2+k41C+k42=0, ![]() , (2)
, (2)
де  ,
, ![]() , (3)
, (3)
та
Rr=-CLr, (4)
у яких:
k1=Usa1-Usa2-wdtUsb1;
k2=Usb1-Usb2-wdtUsa1;
k3=Usa2-Usa3-wdtUsb2;
k4=Usb2-Usb3-wdtUsa2;
k5=(-isa1+isa2+wdtisb1);
k6=(-isb1+isb2-wdtisa1);
k7=(-isa2+isa3+wdtisb2);
k8=(-isb2+isb3-wdtisa2);
 ;
;
 ;
;
 ;
;
 ;
;
![]() ;
;
![]() ;
;
![]() ;
;
k16=k6-k5k13;
k17=k7+k5k14;
k18=k8+k15k5;
k19=dt(-isb1+isa1k13);
k20=dt(-isa2-k14isa1);
k21=dt(-isb2-k15isa1);
k22=-k2+k1k13;
k23=k13k9-k10;
k24=-Usb1+k13Usa1;
![]() ;
;
k26=k16k3+k22k17+k1k16k14;
k27=k16k4+k22k18+k1k16k15;
k28=k3k19+k24dtk17+k20k22+Usa2k16dt+Usa1k14k16dt+k14k19k1;
k29=k19k4+k24dtk18+k22k21+Usb2k16dt+Usa1k15k16dt+k15k1k19;
k30=k23k17+k11k16+k9k16k14;
k31=k23k18+k16k12+k9k16k15;
![]() ;
;
![]() ;
;
k34=k24k20dt+dtUsa2k19+k14k19dtUsa1;
k35=k24k21dt+dtUsb2k19+k15k19dtUsa1;
![]() ;
;
![]() ;
;
k38=-k37k34+k36k35;
k39=k36k29-k33k34-k28k37+k32k35;
k40=k27k36+k32k29-k31k34-k37k26-k33k28+k30k35;
k41=k27k32+k30k29-k33k26-k31k28;
k42=k30k27-k31k26;
де Usa1=Ua1, Usa2=Ua2, Usa3=Ua3 - значення проекції вектора напруги (для трьох послідовних інтервалів виміру), підведеного до статора двигуна, на вісь a нерухомої щодо статора системи координат;
![]() ,
, ![]() ,
, ![]() - значення проекції вектора напруги, підведеного до статора двигуна, на вісь b нерухомої щодо статора системи координат;
- значення проекції вектора напруги, підведеного до статора двигуна, на вісь b нерухомої щодо статора системи координат;
Ua1, Uа2, Uа3, Ub1, Ub2, Ub3 - значення фазних напруг фаз А и В для трьох послідовних інтервалів виміру;
isa1=ia1, isa2=ia2, isa3=ia3, isa4=ia4 - значення проекції вектора струму статора (для чотирьох послідовних інтервалів виміру) на вісь a нерухомої щодо статора системи координат;
![]() ,
, ![]() ,
, ![]() ,
, ![]() - значення проекції вектора струму статора (для чотирьох послідовних інтервалів виміру) на вісь b нерухомої щодо статора системи координат;
- значення проекції вектора струму статора (для чотирьох послідовних інтервалів виміру) на вісь b нерухомої щодо статора системи координат;
ia1, ia2, ia3, ia4, ib1, ib2, ib3, ib4, - значення фазних струмів фаз А и В для чотирьох послідовних інтервалів виміру;
w=wrр - електрична частота обертання ротора (р - число пар полюсів).
Текст
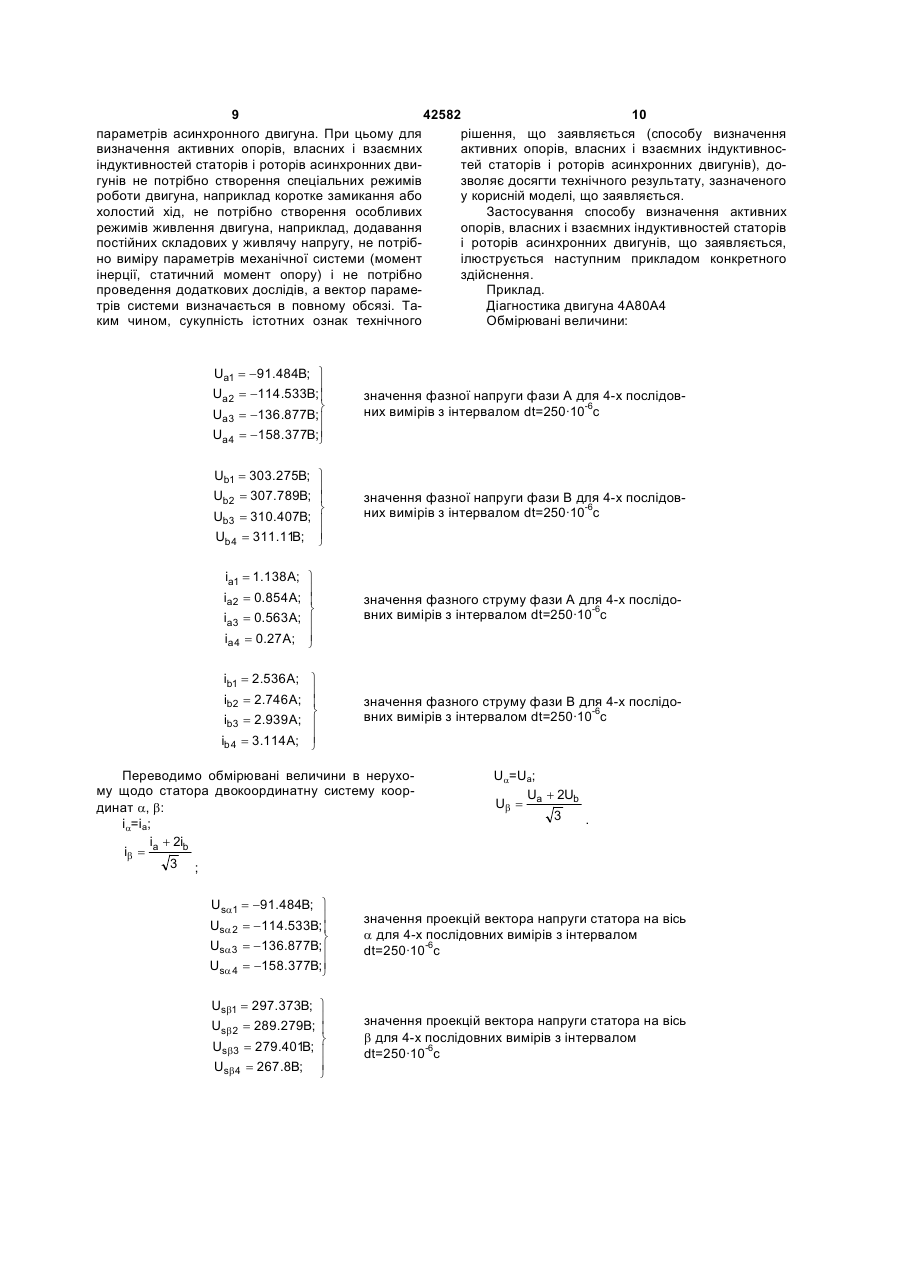
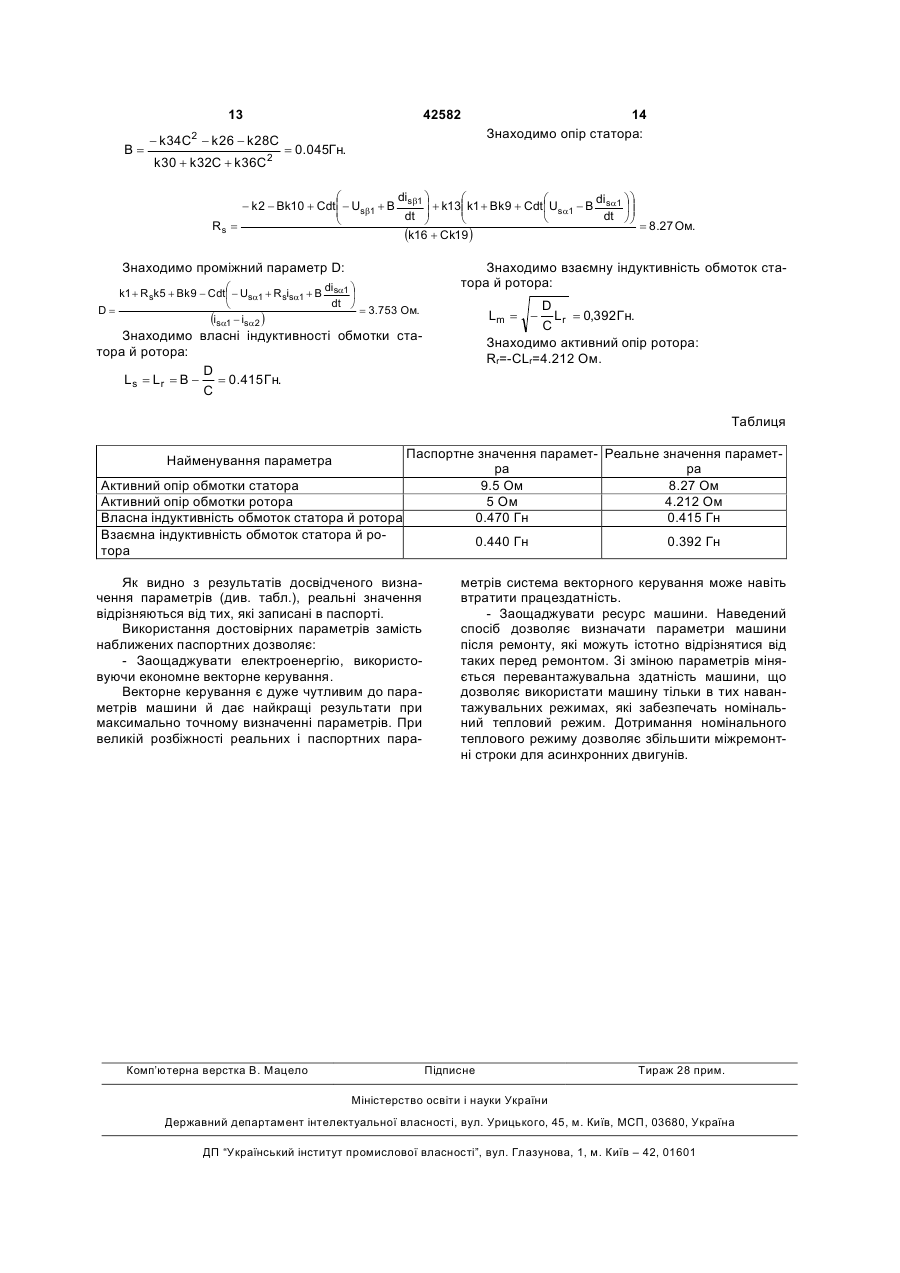
Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів, що включає реєстрацію реально діючих в асинхронному двигуні сигналів й обчислення по розрахункових формулах параметрів асинхронного двигуна, який відрізняється тим, 3 k19=dt(-isb1+isa1k13); k20=dt(-isa2-k14isa1); k21=dt(-isb2-k15isa1); k22=-k2+k1k13; k23=k13k9-k10; k24=-Usb1+k13Usa1; disb1 di k 25 = - k13 sa1 ; dt dt 42582 4 k26=k16k3+k22k17+k1k16k14; k27=k16k4+k22k18+k1k16k15; k28=k3k19+k24dtk17+k20k22+Usa2k16dt+Usa1k14k16 dt+k14k19k1; k29=k19k4+k24dtk18+k22k21+Usb2k16dt+Usa1k15k16 dt+k15k1k19; k30=k23k17+k11k16+k9k16k14; k31=k23k18+k16k12+k9k16k15; k 32 = dtk17k 25 + k 20k 23 + k11k19 - dt k 33 = k18dtk 25 + k 23k 21 + k12k19 - dt k34=k24k20dt+dtUsa2k19+k14k19dtUsa1; k35=k24k21dt+dtUsb2k19+k15k19dtUsa1; di sa 2 di - k14k19 dt sa1 ; dt dt disb2 di k37 = k 21dtk 25 - dtk19 - k15k19dt sa1 ; dt dt k 36 = k 25k 20 dt - dtk19 k38=-k37k34+k36k35; k39=k36k29-k33k34-k28k37+k32k35; k40=k27k36+k32k29-k31k34-k37k26k33k28+k30k35; k41=k27k32+k30k29-k33k26-k31k28; k42=k30k27-k31k26; де Usa1=Ua1, Usa2=Ua2, Usa3=Ua3 - значення проекції вектора напруги (для трьох послідовних інтервалів виміру), підведеного до статора двигуна, на вісь a нерухомої щодо статора системи координат; U + 2Ub3 U + 2Ub2 U + 2Ub1 , , Usb3 a3 Usb2 a2 Usb1 a1 3 3 3 - значення проекції вектора напруги, підведеного до статора двигуна, на вісь b нерухомої щодо статора системи координат; Корисна модель відноситься до галузі електротехніки, а саме до визначення внутрішніх параметрів асинхронних машин (активних опорів, власних індуктивностей статора й ротора і їхніх взаємних індуктивностей), і може бути використана для функціонального діагностування, прогнозування стану електродвигунів і створення пристроїв превентивного захисту. Відомий спосіб визначення характеристик асинхронного двигуна й пристрій для його реалізації (див., наприклад, Патент РФ №2143121 С1 від 20.12.1999р. МПК G01R31/34). Відомий спосіб передбачає визначення характеристик асинхронного двигуна при загальмованому роторі й живленні обмоток статора від джерела змінної частоти й напруги, визначення розрахункової напруги без обліку впливу активного опору обмоток статора, вимір у процесі досліду поточного значення цієї напруги й зміна величини живлячої напруги доти, поки поточні й розрахункове значення не збіжать di disa2 k16 - k14k16dt sa1 + k14k19k 9 ; dt dt disb2 dt k16 - k15k16dt disa1 + k15k 9k19 ; dt Ua1, Uа2, Uа3, Ub1, Ub2, Ub3 - значення фазних напруг фаз А и В для трьох послідовних інтервалів виміру; isa1=ia1, isa2=ia2, isa3=ia3, isa4=ia4 - значення проекції вектора струму статора (для чотирьох послідовних інтервалів виміру) на вісь a нерухомої щодо статора системи координат; i + 2ib1 i + 2ib2 i + 2ib3 , , , isb1 a1 isb2 a2 isb3 a3 3 3 3 i + 2ib4 - значення проекції вектора струму isb4 a4 3 статора (для чотирьох послідовних інтервалів виміру) на вісь b нерухомої щодо статора системи координат; ia1, ia2, ia3, ia4, ib1, ib2, ib3, ib4, - значення фазних струмів фаз А и В для чотирьох послідовних інтервалів виміру; w=wrр - електрична частота обертання ротора (р число пар полюсів). ся, з наступним виміром сили або моменту й струму. Відомий також спосіб діагностування асинхронного двигуна (див., наприклад, Патент РФ №2178229 С2 від 01.06.1999р. МПК Н02К15/00, G01R31/34). Відомий спосіб включає вимір значення активних опорів обмоток статора й ротора, опорів ізоляції обмоток статора й ротора, коефіцієнта абсорбції, коефіцієнта співвідношення ємностей, обмірюваних при різних частотах іспитової напруги, температури обмоток статора й порівняння обмірюваних значень із гранично припустимими, при цьому спочатку вимірюють значення активного опору обмоток статора й ротора, а після виміру значення температури обмотки статора вимірюють значення температури підшипників, тиску щіток й їхню висоту. Недоліком відомих способів є вимога втручання в роботу асинхронного двигуна й/або створення спеціальних режимів його роботи (коротке замикання, холостий хід, загальмовування ротора, жи 5 42582 6 синфазне зниження частоти й напруги живлення влення обмоток статора від джерела змінної часдо номінальних значень). тоти й напруги й т.д.). Загальними ознаками найближчого аналога Відомий також спосіб визначення наведених (прототипу) і способу визначення активних опорів, активного й індуктивного опорів ротора асинхронвласних і взаємних індуктивностей статора й ротоного двигуна (див., наприклад, Авторське посвідра асинхронних двигунів, що заявляється, є: чення СРСР №1222048 А1 від 01.06.1999р. МПК - реєстрація реально діючих в асинхронному G01R31/34). Даний спосіб включає вплив на двидвигуні сигналів й обчислення по розрахункових гун номінальною по частоті й амплітуді напругою, формулах параметрів асинхронного двигуна. вимір номінальної частоти напруги, частоти оберВ основу корисної моделі поставлено задачу тання ротора, що встановилася, споживаної активдосконалення способу визначення активних оповної потужності й току, обчислення по розрахункорів, власних і взаємних індуктивностей статорів і вій формулі наведених активного й індуктивного роторів асинхронних двигунів шляхом пасивної опору ротора, при цьому після виміру частоти wв реєстрації сигналів від асинхронного двигуна й обертання ротора синфазно підвищують частоту й наступного обчислення по розрахункових формунапругу живлення до досягнення ротором частоти лах параметрів асинхронного двигуна, що дозвообертання, рівної (1,05-1,5) wн/Р, де Р - число пар лить підвищити ефективність визначення парамеполюсів, після чого синфазно знижують частоту й трів асинхронного двигуна і, як наслідок, напругу живлення до номінальної, а величину заощаджувати електричну енергію. споживаного струму її і частоту wр обертання роОчікуваним технічним результатом корисної тора вимірюють при нульовому значенні споживамоделі, що заявляється, (способу визначення акної активної потужності, і наведені активний й інтивних опорів, власних і взаємних індуктивностей дуктивний опори ротора обчислюють по статорів і роторів асинхронних двигунів) є підвиформулах: щення ефективності визначення параметрів асинw Pö æ хронного двигуна шляхом пасивної реєстрації сиг(U1 - I1x1)2 rm ç1 - p ÷ ç wн ÷ налів від асинхронного двигуна і їх наступної ø è '= , r2 статистичної обробки. 2 U 2 - 2U1I1(x 1 + x m ) + I2 é(x 1 + x m )2 + rm ù Зазначений технічний результат досягається ê ú 1 ë û тим, що в способі визначення активних опорів, власних і взаємних індуктивностей статорів і рото2 2 рів асинхронних двигунів, що включає реєстрацію (U1 - I1x1)éIæ rm + x m ö - U1x m + I1x1x m ù ç ÷ êè ú ø ë û реально діючих в асинхронному двигуні сигналів й = x '2 2 - 2U I (x + x ) + I2 é(x + x )2 + r 2 ù обчислення по розрахункових формулах параметU 11 1 m 1 m mú ê 1 ë û рів асинхронного двигуна, відповідно до технічного де х1 - індуктивний опір ротора, рішення, що заявляється, rm й хm - активний й індуктивний опір контуру, - реєстрацію реально діючих в асинхронному що намагнічує, двигуна, двигуні сигналів здійснюють у режимах його робоU1 - номінальна напруга. чого функціонування з наступною статистичною Даний спосіб визначення наведених активного обробкою сигналів; й індуктивного опорів ротора асинхронного двигупри цьому в якості реально діючих в асинхна є найбільш близьким по технічній сутності й ронному двигуні сигналів використовують миттєві ефекту, що досягається, до заявляємого способу значення фазних струмів для 4-х послідовних інвизначення активних опорів, власних і взаємних тервалів виміру, миттєві значення фазних або лііндуктивностей статорів і роторів асинхронних двинійних напруг для 4-х послідовних інтервалів вимігунів. ру й частоту обертання вала машини (один вимір Недоліком даного способу є вимога втручання при стабільній швидкості або чотири - при нестабів роботу асинхронного двигуна й/або створення льній), а як параметри асинхронних двигунів - акспеціальних режимів його роботи (вплив на двигун тивні опори статора й ротора, власні індуктивності номінальною по частоті й амплітуді напругою, систатора й ротора і їхню взаємну індуктивність; нфазне підвищення частоти й напруги живлення й причому обчислення параметрів асинхронного двигуна виконують по формулах: disb1 ö æ ö æ ÷ + k13ç k1 + Bk 9 + Cdt æ Usa1 - B disa1 ö ÷ - k 2 - Bk10 + Cdt ç - Usb1 + B ç ÷ ç ç dt ÷ dt ø ÷ è ø (1) è è ø Rs = (k16 + Ck19 ) де B = - k 34C 2 - k 26 - k 28C , а С знаходять із k 30 + k 32C + k 36C 2 k38C4+k39C3+k40C2+k41C+k42=0, Lr = B D , (2) C де di ö æ k1 + R sk 5 + Bk 9 - Cdt ç - U sa1 + R si sa1 + B sa1 ÷ ç dt ÷ ø, è D= (isa1 - i sa2 ) Lm = та D L r , (3) C 7 Rr=-CLr, (4) у яких: k1=Usa1-Usa2-wdtUsb1; k2=Usb1-Usb2-wdtUsa1; k3=Usa2-Usa3-wdtUsb2; k4=Usb2-Usb3-wdtUsa2; k5=(-isa1+isa2+wdtisb1) k6=(-isb1+isb2-wdtisa1) k7=(-isa2+isa3+wdtisb2) k8=(-isb2+isb3-wdtisa2) 42582 k14 = k15 = (isb3 - isb2 ) (isa1 - isa2 ) k16=k6-k5k13 k17=k7+k5k14 k18=k8+k15k5 k19=dt(-isb1+isa1k13) k20=dt(-isa2-k14isa1) k21=dt(-isb2-k15isa1) k22=-k2+k1k13 k23=k13k9-k10 k24=-Usb1+k13Usa1 disb1 di k 25 = - k13 sa1 dt dt k26=k16k3+k22k17+k1k16k14 k27=k16k4+k22k18+k1k16k15 k28=k3k19+k24dtk17+k20k22+Usa2k16dt+Usa1k1 4k16dt+k14k19k1 k29=k19k4+k24dtk18+k22k21+Usb2k16dt+Usa1k1 5k16dt+k15k1k19 k30=k23k17+k11k16+k9k16k14 k31=k23k18+k16k12+k9k16k15 di sb1 ö æ di di ÷ k 9 = ç - sa1 + sa2 + wdt ç dt dt ÷ dt ø è ö æ di sb1 di sb2 di + - wdt sa1 ÷ k10 = ç ç dt ÷ dt dt ø è di sb2 ö æ di sa2 di sa3 ÷ + + wdt k11 = ç ç dt dt ÷ dt ø è ö æ di sb2 di sb3 di + - wdt sa 2 ÷ k12 = ç ç dt ÷ dt dt ø è isb1 - isb2 k13 = (isa1 - isa2 ) ( (isa3 - isa2 ) (isa1 - isa2 ) 8 ) di di sa 2 k16 - k14k16 dt sa1 + k14k19k 9 dt dt disb 2 di k 33 = k18 dtk 25 + k 23k 21 + k12k19 - dt k16 - k15k16 dt sa1 + k15k 9k19 dt dt k 32 = dtk17k 25 + k 20k 23 + k11k19 - dt k34=k24k20dt+dtUsa2k19+k14k19dtUsa1 k35=k24k21dt+dtUsb2k19+k15k19dtUsa1 di di k 36 = k 25k 20dt - dtk19 sa 2 - k14k19dt sa1 dt dt disb2 di - k15k19dt sa1 k 37 = k 21dtk25 - dtk19 dt dt k38=-k37k34+k36k35; k39=k36k29-k33k34-k28k37+k32k35; k40=k27k36+k32k29-k31k34-k37k26k33k28+k30k35; k41=k27k32+k30k29-k33k26-k31k28; k42=k30k27-k31k26; де Usa1=Ua1, Usa2=Ua2, Usa3=Ua3 - значення проекції вектора напруги (для трьох послідовних інтервалів виміру), підведеного до статора двигуна, на вісь a нерухомої щодо статора системи координат; U sb1 = U a1 + 2Ub1 , 3 Ua3 + 2Ub3 U sb 2 = Ua2 + 2Ub2 , 3 - значення проекції вектора 3 напруги, підведеного до статора двигуна, на вісь b нерухомої щодо статора системи координат; Ua1, Uа2, Uа3, Ub1, Ub2, Ub3 - значення фазних напруг фаз А і В для трьох послідовних інтервалів виміру; isa1=ia1, isa2=ia2, isa3=ia3, isa4=ia4 - значення проекції вектора струму статора (для чотирьох послідовних інтервалів виміру) на вісь a нерухомої щодо статора системи координат; Usb3 = i + 2ib1 , i sb1 = a1 3 + 2ib2 i , i sb2 = a2 3 + 2ib3 + 2ib4 i i , i sb 4 = a 4 - значення i sb3 = a3 3 3 проекції вектора струму статора (для чотирьох послідовних інтервалів виміру) на вісь b нерухомої щодо статора системи координат; ia1, ia2, ia3, ia4, ib1, ib2, ib3, ib4, - значення фазних струмів фаз А і В для чотирьох послідовних інтервалів виміру; w=wrр - електрична частота обертання ротора (р - число пар полюсів). Сутність технічного рішення, що заявляється, полягає в тім, що при реєстрації реально діючих в асинхронному двигуні сигналів у режимах його робочого функціонування з наступною статистичною обробкою сигналів; при використанні в якості реально діючих в асинхронному двигуні сигналів миттєвих значень фазних струмів для 4-х послідовних інтервалів виміру, миттєвих значень фазних або лінійних напруг для 4-х послідовних інтервалів виміру й частоти обертання вала машини (один вимір при стабільній швидкості або чотири - при нестабільній), а в якості параметрів асинхронних двигунів - активних опорів статора й ротора, власних індуктивностей статора й ротора і їхньої взаємної індуктивності; і при обчисленні параметрів асинхронного двигуна по формулах (1)-(4), за рахунок пасивної реєстрації сигналів від асинхронного двигуна і їх наступної статистичної обробки відбувається підвищення ефективності визначення 9 42582 10 параметрів асинхронного двигуна. При цьому для рішення, що заявляється (способу визначення визначення активних опорів, власних і взаємних активних опорів, власних і взаємних індуктивносіндуктивностей статорів і роторів асинхронних двитей статорів і роторів асинхронних двигунів), догунів не потрібно створення спеціальних режимів зволяє досягти технічного результату, зазначеного роботи двигуна, наприклад коротке замикання або у корисній моделі, що заявляється. холостий хід, не потрібно створення особливих Застосування способу визначення активних режимів живлення двигуна, наприклад, додавання опорів, власних і взаємних індуктивностей статорів постійних складових у живлячу напругу, не потрібі роторів асинхронних двигунів, що заявляється, но виміру параметрів механічної системи (момент ілюструється наступним прикладом конкретного інерції, статичний момент опору) і не потрібно здійснення. проведення додаткових дослідів, а вектор парамеПриклад. трів системи визначається в повному обсязі. ТаДіагностика двигуна 4А80А4 ким чином, сукупність істотних ознак технічного Обмірювані величини: Ua1 = -91.484B; ü ï Ua2 = -114.533B;ï ý Ua3 = -136.877B;ï Ua4 = -158.377B;ï þ значення фазної напруги фази А для 4-х послідовних вимірів з інтервалом dt=250·10-6с Ub1 = 303.275B; ü ï ï ý ï ï þ значення фазної напруги фази B для 4-х послідовних вимірів з інтервалом dt=250·10-6с ia1 = 1.138A; ü ï ï ý ï ï þ значення фазного струму фази А для 4-х послідовних вимірів з інтервалом dt=250·10-6с ib1 = 2.536A; ü ï ib2 = 2.746A; ï ý ib3 = 2.939A; ï ib 4 = 3.114A; ï þ значення фазного струму фази B для 4-х послідовних вимірів з інтервалом dt=250·10-6с Ub2 = 307.789B; Ub3 = 310.407B; Ub 4 = 311.11B; ia2 = 0.854A; ia3 = 0.563A; ia 4 = 0.27A; Переводимо обмірювані величини в нерухому щодо статора двокоординатну систему координат a, b: іa=iа; i + 2ib ib = a 3 ; Ua=Uа; U + 2Ub Ub = a 3 . Usa1 = -91.484B; ü ï Usa 2 = -114.533B;ï ý Usa3 = -136.877B;ï Usa 4 = -158.377B;ï þ значення проекцій вектора напруги статора на вісь a для 4-х послідовних вимірів з інтервалом dt=250·10-6с Usb1 = 297.373B; ü ï Usb2 = 289.279B; ï ý Usb3 = 279.401B; ï Usb4 = 267 .8B; ï þ значення проекцій вектора напруги статора на вісь b для 4-х послідовних вимірів з інтервалом dt=250·10-6с 11 42582 12 ia1 = 1.138A; ü ï ia2 = 0.854A; ï ý ia3 = 0.563A; ï ia 4 = 0.27A; ï þ значення проекцій вектора струму статора на вісь a для 4-х послідовних вимірів з інтервалом dt=250·10-6с isb1 = 3 .585 A; ü ï isb2 = 3.664 A; ï ý isb3 = 3.719 A; ï isb4 = 3.752 A; ï þ значення проекцій вектора напруги статора на вісь b для 4-х послідовних вимірів з інтервалом dt=250·10-6с Розраховуємо значення коефіцієнтів k1-k42: k1=Usa1-Usa2-wdtUsb1=1.002 В k2=Usb1-Uxb2+wdtUsa1=1.312 B k3=Usa2-Usa3-wdtUsb2=0.896 B; k4=Usb2-Usb3+wdtUsa2=1.386 B; k5=-isa1+isa2+wdtisb1=-0.019 A; k6=-іsb1+isb2-wdtisa1=-6.138×10-3 A; k7=-isa2+isa3+wdtisb2=-0.018 A; k8=-isb2+isb3-wdtisa2=-7.609×10-3 A; disb1 A di di k 9 = - sa1 + sa 2 + wdt = 2.16 ; dt c dt dt disb1 disb2 di A + - wdt sa1 = -5.884 ; k10 = dt dt dt c disb2 disa2 disa3 A k11 = + + wdt = 2.615 ; dt dt dt c di sb2 di sb3 di sa 2 A k12 = + - wdt = -5.696 ; dt dt dt c isb1 - isb2 k13 = = -0.275; (isa1 - isa2 ) (i - i ) k14 = sa3 sa2 = -1.018; (isa1 - isa2 ) ( k15 = ) (isb3 - isb2 ) = 0.195; k16=k6-k5k13=-0.22A; k17=k7+k5k14=8.91·10-4A; k18=k8+k15k5=-0.011A; k19=dt(-іsb1+isa1k13)=-0.017746A×c; k20=dt(-isa2-k14isa1)=7.646×10-5А×с; k21=dt(-isb2-k15isa1)=-9.716×10-4A×c; k22=-k2+k1k13=-1.587B A k 23 = k13k 9 - k10 = 5.29 c k24=-Usb1+k13Usa1=-272.235 В di sb1 di k 25 = - k13 sa1 = 0 dt dt k26=k16k3+k22k17+k1k16k14=-5.846·10-16В·А k27=k16k4+k22k18+k1k16k15=5.911·10-16В·А k28=k3k19+k24dtk17+k20k22+Usa2k16dt+Usa1k1 4k16dt+k14k19k1=5.421×10-18В×А×с k29=k19k4+k24dtk18+k22k21+Usb2k16dt+Usa1k1 5k16dt+k15k1k19=4.18×10-17В×А×с A2 k 30 = k 23k17 + k11k 6 + k 9k16k14 = 8.349 × 10 -14 c k 31 = k 23k18 + k16k12 + k 9k16k15 = -5.642 × 10 -15 A2 c (isa1 - isa2 ) k33 = k18dtk 25 + k 23k 21 + k12k19 - dt disb2 dt k34=k24k20dt+dtUsa2k19+k14k19dtUsa1=6.287×10-18B×A×c2 k35=k24k21dt+dtUsb2k19+k15k19dtUsa1=2.795×10-20В×A×c2 k 37 = k 21dtk 25 - dtk19 k16 - k15k16dt disa1 + k15k9k19 = -4.262 × 10 -16 A 2 dt k 36 = k 25k 20dt - dtk19 di di sa2 - k14k19dt sa1 = 0 dt dt disb2 di - k15k19dt sa1 = 6.776 × 10 - 21A 2 × c dt dt k38=-k37k34+k36k35=-8.724·10-40В·А3·с3 k39=k36k29-k33k34-k28k37+k32k35=-1.353·1034 B·A3·с2 k40=k27k36+k32k29-k31k34-k37k26k33k28+k30k35=2.851·10-31В·А3·с k41=k27k32+k30k29-k33k26-k31k28=7.292·1016 В·А3 B × A3 . c Вирішуючи рівняння k38C4+k39C3+k40C2+k41C+k42=0 будь-яким чисельним методом, одержуємо: С=-10.149 с-1. Знаходимо проміжний параметр В: k 42 = k 30k 27 - k 31k 26 = 7.401 × 10 -15 13 B= - k34C2 - k 26 - k28C k30 + k32C + k36C2 42582 = 0.045Гн. 14 Знаходимо опір статора: disb1 ö æ æ ö di ÷ + k13ç k1 + Bk9 + Cdt æ Usa1 - B sa1 ö ÷ - k 2 - Bk10 + Cdt ç - Usb1 + B ç ÷ ç ç dt ø ÷ dt ÷ è è ø = 8.27 Ом. è ø Rs = (k16 + Ck19 ) Знаходимо проміжний параметр D: æ di ö k1 + Rsk 5 + Bk 9 - Cdt ç - Usa1 + Rsisa1 + B sa1 ÷ dt ø è = 3.753 Ом. D= (isa1 - isa2 ) Знаходимо взаємну індуктивність обмоток статора й ротора: D Lr = 0,392Гн. C Знаходимо активний опір ротора: Rr=-CLr=4.212 Ом. Lm = Знаходимо власні індуктивності обмотки статора й ротора: D Ls = Lr = B - = 0.415 Гн. C Таблиця Паспортне значення парамет- Реальне значення параметра ра Активний опір обмотки статора 9.5 Oм 8.27 Ом Активний опір обмотки ротора 5 Ом 4.212 Ом Власна індуктивність обмоток статора й ротора 0.470 Гн 0.415 Гн Взаємна індуктивність обмоток статора й ро0.440 Гн 0.392 Гн тора Найменування параметра Як видно з результатів досвідченого визначення параметрів (див. табл.), реальні значення відрізняються від тих, які записані в паспорті. Використання достовірних параметрів замість наближених паспортних дозволяє: - Заощаджувати електроенергію, використовуючи економне векторне керування. Векторне керування є дуже чутливим до параметрів машини й дає найкращі результати при максимально точному визначенні параметрів. При великій розбіжності реальних і паспортних пара Комп’ютерна верстка В. Мацело метрів система векторного керування може навіть втратити працездатність. - Заощаджувати ресурс машини. Наведений спосіб дозволяє визначати параметри машини після ремонту, які можуть істотно відрізнятися від таких перед ремонтом. Зі зміною параметрів міняється перевантажувальна здатність машини, що дозволяє використати машину тільки в тих навантажувальних режимах, які забезпечать номінальний тепловий режим. Дотримання номінального теплового режиму дозволяє збільшити міжремонтні строки для асинхронних двигунів. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of active resistances, natural and mutual inductances of stator and rotor of asynchronous motors
Автори англійськоюVorobeichyk Oleh Stanislavovych, Kozakevych Ihor Arkadiovych, Topchienko Yurii Anatoliiovych, Urdin Ihor Volodymyurovych
Назва патенту російськоюСпособ определения активных сопротивлений, собственных и взаимных индуктивностей статора и ротора асинхронных двигателей
Автори російськоюВоробейчик Олег Станиславович, Козакевич Игорь Аркадьевич, Топчиенко Юрий Анатолиевич, Урдин Игорь Владимирович
МПК / Мітки
МПК: G01R 31/34, H02K 15/00
Мітки: власних, активних, спосіб, ротора, взаємних, статора, індуктивностей, визначення, двигунів, асинхронних, опорів
Код посилання
<a href="https://ua.patents.su/7-42582-sposib-viznachennya-aktivnikh-oporiv-vlasnikh-i-vzaehmnikh-induktivnostejj-statora-jj-rotora-asinkhronnikh-dviguniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів</a>
Спосіб випробування асинхронних двигунів
Номер патенту: 11264
Опубліковано: 15.12.2005
Автори: Муріков Дмитро Володимирович, Василега Петро Олександрович
МПК: G01R 31/34
Мітки: асинхронних, спосіб, двигунів, випробування
Формула / Реферат:
Спосіб випробування асинхронних двигунів, при якому подають напругу від регульованого джерела живлення на обмотку статора двигуна з незагальмованим ротором напруги промислової частоти в режимі холостого ходу при номінальних її значеннях, який відрізняється тим, що після подання напруги в подальшому здійснюють підвищення напруги, щоб по обмотках протікав струм, величина якого дорівнює номінальному значенню або перевищує це значення, регулюють...
Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронних двигунів
Номер патенту: 12517
Опубліковано: 15.02.2006
Автори: Поджаренко Володимир Олександрович, Гоменюк Дмитро Анатолійович
МПК: G01L 3/00
Мітки: коефіцієнтів, корисної, визначення, спосіб, інтервальних, асинхронних, двигунів, дії
Формула / Реферат:
Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронного двигуна, при якому його розганяють та переводять в стан самогальмування, вимірюють та реєструють інформативні параметри, та обчислюють ККД, який відрізняється тим, що спожиту електричну енергію вимірюють на проміжках часу розгону та самогальмування, а інтервальні ККД обчислюють за формулами:електромагнітний
Спосіб моніторингу асинхронних двигунів і пристрій для його здійснення
Номер патенту: 64083
Опубліковано: 16.02.2004
Автори: Огарь Олександр Сергійович, Чорний Олексій Петрович, Барвінок Дмитро Володимирович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: пристрій, моніторингу, асинхронних, спосіб, двигунів, здійснення
Формула / Реферат:
1. Спосіб моніторингу асинхронного двигуна, що включає підключення через комутуючі апарати і тиристорний регулятор напруги до трифазної мережі і вимірювання миттєвих значень струмів і напруг двигуна та розрахунок електричних параметрів, який відрізняється тим, що за даними миттєвих значень струмів і напруг двигуна розраховується миттєве значення споживаної потужності і за розрахованими величинами визначають рівень вібрації, який викликаний...
Система ізоляції обмотки статора або ротора електричних машин з тяжкими умовами експлуатації
Номер патенту: 3267
Опубліковано: 15.11.2004
Автори: Каїка Василь Васильович, Ткачук Олександр Миколайович, Ткачук Микола Миколайович
МПК: H02K 15/00
Мітки: ротора, електричних, тяжкими, експлуатації, система, ізоляції, умовами, обмотки, машин, статора
Формула / Реферат:
Спосіб ізоляції обмотки статора або ротора електричних машин, який відрізняється тим, що в паз статора або ротора закладають пазові коробочки з ізоляційного матеріалу на основі поліамідної плівки, в пазові коробочки вкладають обмотку з емальованого провідника високої надійності та теплостійкості, а між лобовими частинами обмотки закладають ізоляційні прокладки з того ж матеріалу, що і пазові коробочки, після чого обмотку просочують еластичною...
Пристрій для моніторингу асинхронних двигунів
Номер патенту: 12182
Опубліковано: 16.01.2006
Автори: Розводюк Михайло Петрович, Мокін Борис Іванович, Грабко Володимир Віталійович
МПК: G01R 31/34
Мітки: пристрій, моніторингу, асинхронних, двигунів
Формула / Реферат:
Пристрій для моніторингу асинхронних двигунів, що містить асинхронний двигун, тиристорний регулятор напруги, комутуючий апарат, три блоки однофазних контакторних апаратів, чотири пристрої керування трьома блоками однофазних контакторних апаратів та комутуючим апаратом, цифро-аналоговий перетворювач для керування тиристорним регулятором напруги та чотирма пристроями керування трьома блоками однофазних контакторних апаратів та комутуючим...