Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронних двигунів
Номер патенту: 12517
Опубліковано: 15.02.2006
Автори: Поджаренко Володимир Олександрович, Гоменюк Дмитро Анатолійович
Формула / Реферат
Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронного двигуна, при якому його розганяють та переводять в стан самогальмування, вимірюють та реєструють інформативні параметри, та обчислюють ККД, який відрізняється тим, що спожиту електричну енергію вимірюють на проміжках часу розгону та самогальмування, а інтервальні ККД обчислюють за формулами:
електромагнітний
механічний
![]()
загальний
де ![]() ,
, ![]() - відповідно нижня та верхня межі інтервалу кутової швидкості;
- відповідно нижня та верхня межі інтервалу кутової швидкості;
![]() ,
, ![]() - відповідно проміжки часу розгону та самогальмування;
- відповідно проміжки часу розгону та самогальмування;
![]() - спожита електрична енергія;
- спожита електрична енергія;
![]() - момент інерції ротора асинхронного двигуна.
- момент інерції ротора асинхронного двигуна.
Текст
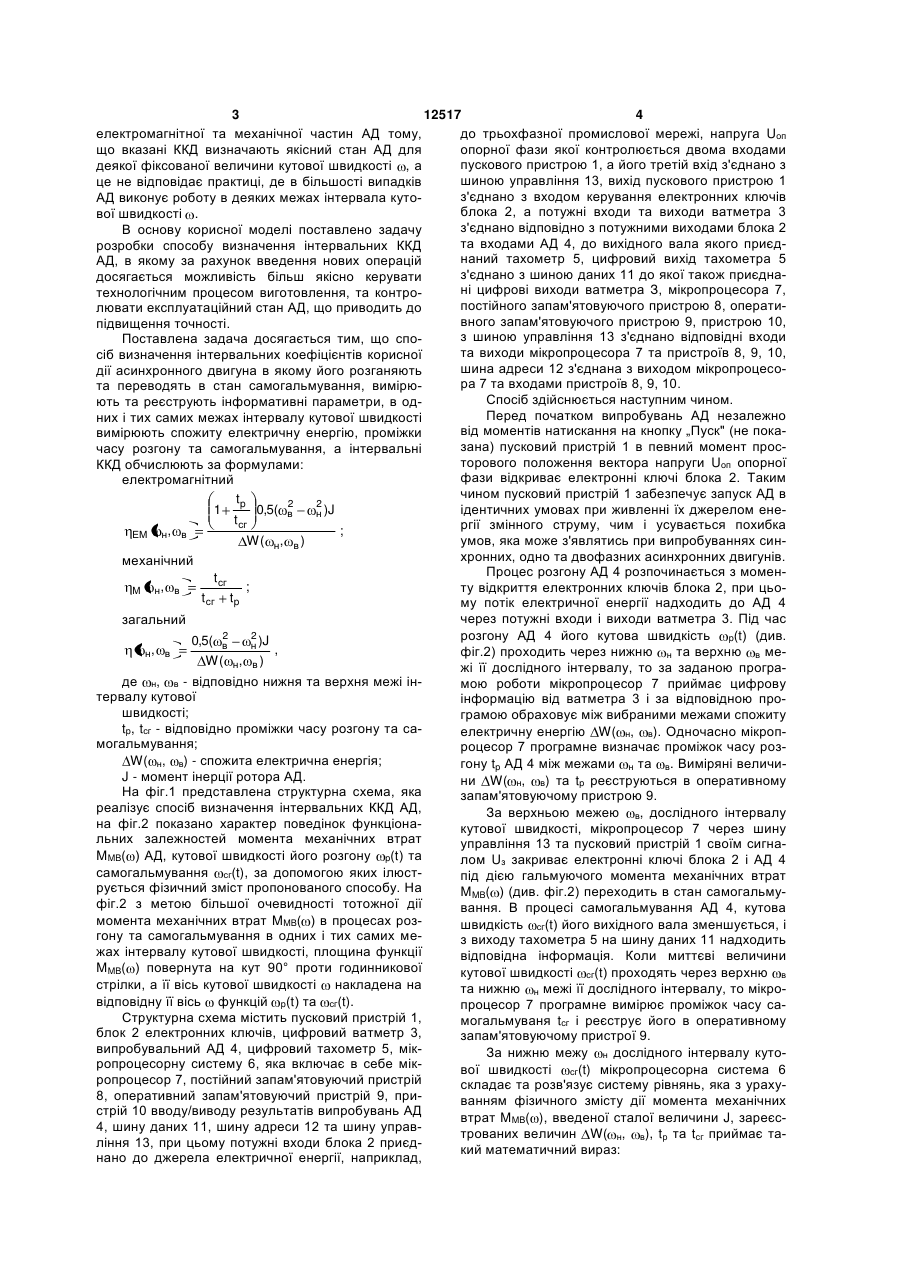
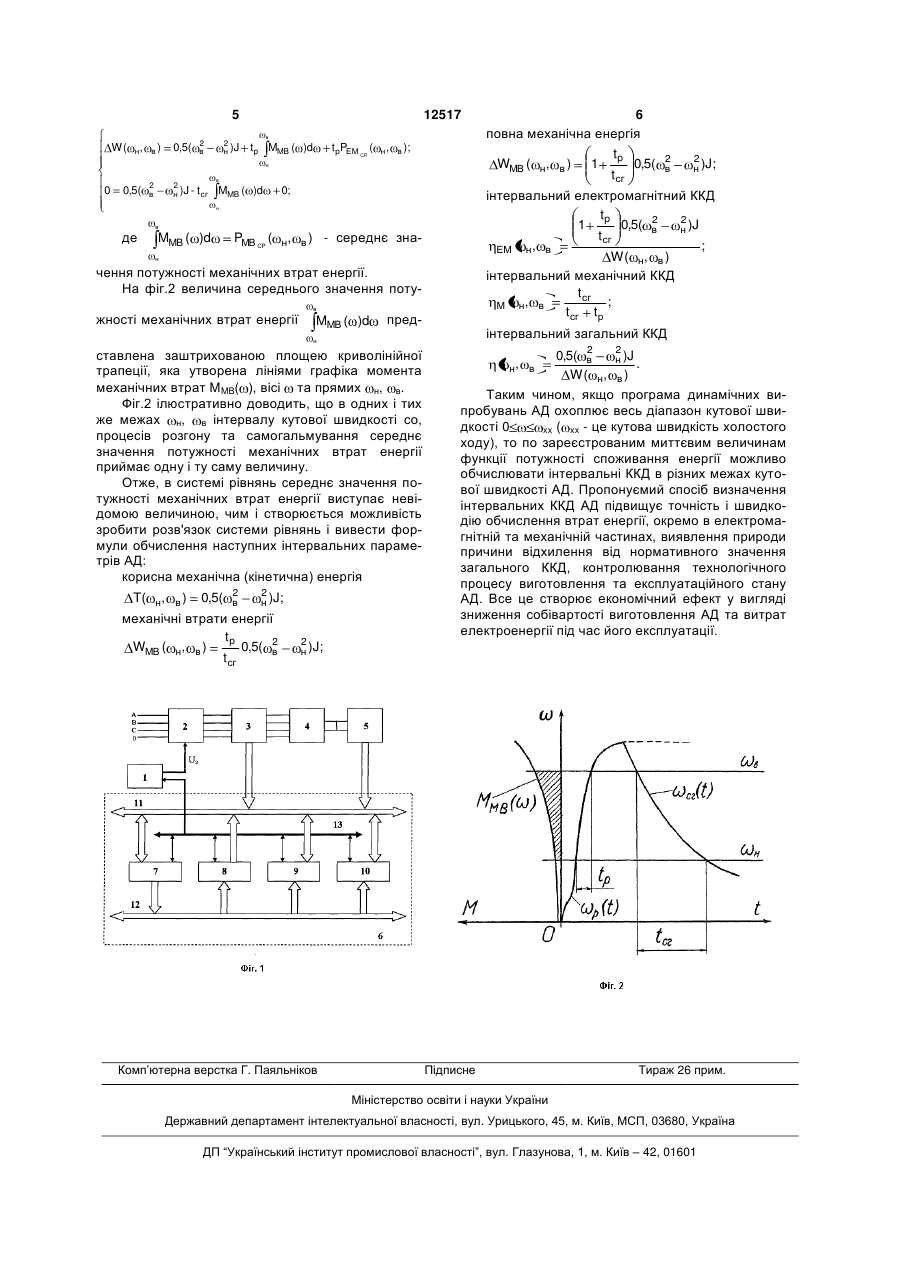
Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронного двигуна, при якому його розганяють та переводять в стан самогальмування, вимірюють та реєструють інформативні параметри, та обчислюють ККД, який відрізняється тим, що спожиту електричну енергію вимірюють на проміжках часу розгону та самогальмування, а інтервальні ККД обчислюють за формулами: електромагнітний 2 1 ЕМ н, в tp tсг 0,5( W( 2 в н, в ) 2 н )J ; механічний М н, в t сг t сг tр загальний н, в 2 0,5( в W ( н, 2 н )J в) , де н , в - відповідно нижня та верхня межі інтервалу кутової швидкості; tр , t сг - відповідно проміжки часу розгону та самогальмування; W ( н, в ) - спожита електрична енергія; (11) UA двигуна [Поджаренко В. О., Кулаков П. І., Гоменюк Д. А. Електромагнітний та механічний ККД асинхронного двигуна // Вісник технологічного університету Поділля. - 2002. - №3. - т. 1]. Сутність способу полягає в тому, що електричний двигун розганяють та переводять в стан самогальмування, вимірюють та реєструють миттєві значення кутової швидкості та потужності споживання електричної енергії, складають та розв'язують систему рівнянь, розраховують потужності енергій корисної, повної механічної та механічних втрат, а миттєві величини ККД, як функції кутової швидкості, обчислюють за формулами. Недоліком прототипу є низька точність визначення миттєвих величин електромагнітного EM( ) та механічного M( ) ККД асинхронного двигуна за рахунок методичної похибки зумовленої застосуванням штучної функції залежності кутового прискорення від кутової швидкості ( ). Недоліком прототипу є і те, що його електромагнітний EM( ) та механічний M( ) ККД з низькою точністю представляють якісний стан, окремо, (19) Корисна модель відноситься до вимірювальної техніки і може бути використаний для динамічних випробувань асинхронних двигунів (АД) з метою визначення їх коефіцієнтів корисної дії (ККД). Відомий спосіб визначення циклового ККД АД, який полягає в тому, що в циклічних виробничих процесах за певний час вимірюють спожиту електричну та обчислюють виконану корисну механічну енергії, а цикловий ККД АД визначають, як відношення корисної механічної енергії до спожитої електричної [Ключев В. Н. Теория электропривода: Учебник для вузов. - М.: Энергоатомиздат, 1985. - 560 с., див. с. 477]. Недоліком аналога є низька точність визначення циклового ККД АД за рахунок методичної похибки. Недоліком аналога є і те, що цикловий ККД має вузькі функціональні можливості і не визначає якісні показники окремо для електромагнітної та механічної частин АД. За прототип обраний спосіб визначення електромагнітного та механічного ККД асинхронного 12517 (13) U J - момент інерції ротора асинхронного двигуна. 3 12517 4 електромагнітної та механічної частин АД тому, до трьохфазної промислової мережі, напруга Uоп що вказані ККД визначають якісний стан АД для опорної фази якої контролюється двома входами пускового пристрою 1, а його третій вхід з'єднано з деякої фіксованої величини кутової швидкості , а шиною управління 13, вихід пускового пристрою 1 це не відповідає практиці, де в більшості випадків з'єднано з входом керування електронних ключів АД виконує роботу в деяких межах інтервала кутоблока 2, а потужні входи та виходи ватметра 3 вої швидкості . з'єднано відповідно з потужними виходами блока 2 В основу корисної моделі поставлено задачу та входами АД 4, до вихідного вала якого приєдрозробки способу визначення інтервальних ККД наний тахометр 5, цифровий вихід тахометра 5 АД, в якому за рахунок введення нових операцій з'єднано з шиною даних 11 до якої також приєднадосягається можливість більш якісно керувати ні цифрові виходи ватметра З, мікропроцесора 7, технологічним процесом виготовлення, та контропостійного запам'ятовуючого пристрою 8, оператилювати експлуатаційний стан АД, що приводить до вного запам'ятовуючого пристрою 9, пристрою 10, підвищення точності. з шиною управління 13 з'єднано відповідні входи Поставлена задача досягається тим, що спота виходи мікропроцесора 7 та пристроїв 8, 9, 10, сіб визначення інтервальних коефіцієнтів корисної шина адреси 12 з'єднана з виходом мікропроцесодії асинхронного двигуна в якому його розганяють ра 7 та входами пристроїв 8, 9, 10. та переводять в стан самогальмування, вимірюСпосіб здійснюється наступним чином. ють та реєструють інформативні параметри, в одПеред початком випробувань АД незалежно них і тих самих межах інтервалу кутової швидкості від моментів натискання на кнопку „Пуск" (не покавимірюють спожиту електричну енергію, проміжки зана) пусковий пристрій 1 в певний момент просчасу розгону та самогальмування, а інтервальні торового положення вектора напруги Uоп опорної ККД обчислюють за формулами: фази відкриває електронні ключі блока 2. Таким електромагнітний чином пусковий пристрій 1 забезпечує запуск АД в tp 2 2 ідентичних умовах при живленні їх джерелом ене1 0,5( в н )J t сг ргії змінного струму, чим і усувається похибка ; ЕМ н, в умов, яка може з'являтись при випробуваннях синW ( н, в ) хронних, одно та двофазних асинхронних двигунів. механічний Процес розгону АД 4 розпочинається з моменt сг ; ту відкриття електронних ключів блока 2, при цьоМ н, в t сг tp му потік електричної енергії надходить до АД 4 загальний н, в 2 0,5( в W ( н, 2 н )J в) , де н, в - відповідно нижня та верхня межі інтервалу кутової швидкості; tp, tсг - відповідно проміжки часу розгону та самогальмування; W( н, в) - спожита електрична енергія; J - момент інерції ротора АД. На фіг.1 представлена структурна схема, яка реалізує спосіб визначення інтервальних ККД АД, на фіг.2 показано характер поведінок функціональних залежностей момента механічних втрат MMB( ) АД, кутової швидкості його розгону p(t) та самогальмування сг(t), за допомогою яких ілюструється фізичний зміст пропонованого способу. На фіг.2 з метою більшої очевидності тотожної дії момента механічних втрат MMB( ) в процесах розгону та самогальмування в одних і тих самих межах інтервалу кутової швидкості, площина функції MMB( ) повернута на кут 90° проти годинникової стрілки, а її вісь кутової швидкості накладена на відповідну її вісь функцій p(t) та сг(t). Структурна схема містить пусковий пристрій 1, блок 2 електронних ключів, цифровий ватметр 3, випробувальний АД 4, цифровий тахометр 5, мікропроцесорну систему 6, яка включає в себе мікропроцесор 7, постійний запам'ятовуючий пристрій 8, оперативний запам'ятовуючий пристрій 9, пристрій 10 вводу/виводу результатів випробувань АД 4, шину даних 11, шину адреси 12 та шину управління 13, при цьому потужні входи блока 2 приєднано до джерела електричної енергії, наприклад, через потужні входи і виходи ватметра 3. Під час розгону АД 4 його кутова швидкість p(t) (див. фіг.2) проходить через нижню н та верхню в межі її дослідного інтервалу, то за заданою програмою роботи мікропроцесор 7 приймає цифрову інформацію від ватметра 3 і за відповідною програмою обраховує між вибраними межами спожиту електричну енергію W( н, в). Одночасно мікропроцесор 7 програмне визначає проміжок часу розгону tp АД 4 між межами н та в. Виміряні величини W( н, в) та tp реєструються в оперативному запам'ятовуючому пристрою 9. За верхньою межею в, дослідного інтервалу кутової швидкості, мікропроцесор 7 через шину управління 13 та пусковий пристрій 1 своїм сигналом Uз закриває електронні ключі блока 2 і АД 4 під дією гальмуючого момента механічних втрат MMB( ) (див. фіг.2) переходить в стан самогальмування. В процесі самогальмування АД 4, кутова швидкість сг(t) його вихідного вала зменшується, і з виходу тахометра 5 на шину даних 11 надходить відповідна інформація. Коли миттєві величини кутової швидкості сг(t) проходять через верхню в та нижню н межі її дослідного інтервалу, то мікропроцесор 7 програмне вимірює проміжок часу самогальмуваня tсг і реєструє його в оперативному запам'ятовуючому пристрої 9. За нижню межу н дослідного інтервалу кутової швидкості сг(t) мікропроцесорна система 6 складає та розв'язує систему рівнянь, яка з урахуванням фізичного змісту дії момента механічних втрат MMB( ), введеної сталої величини J, зареєстрованих величин W( н, в), tр та tсг приймає такий математичний вираз: 5 W( н, в ) 0,5( 2 в 2 н )J 12517 в tp MMB ( )d tpPЕМ ( СР н, в ); н 0 0,5( 2 в 2 н )J - t сг в MMB ( )d 0; в MMB ( )d PМВ СР ( - середнє зна н, в ) н чення потужності механічних втрат енергії. На фіг.2 величина середнього значення потужності механічних втрат енергії в MMB ( )d пред 2 2 T( н, в ) 0,5( в н )J; механічні втрати енергії tp 2 WМВ ( н, в ) 0,5( в t сг 2 н )J; інтервальний загальний ККД н ставлена заштрихованою площею криволінійної трапеції, яка утворена лініями графіка момента механічних втрат MMB( ), вісі та прямих н, в. Фіг.2 ілюстративно доводить, що в одних і тих же межах н, в інтервалу кутової швидкості со, процесів розгону та самогальмування середнє значення потужності механічних втрат енергії приймає одну і ту саму величину. Отже, в системі рівнянь середнє значення потужності механічних втрат енергії виступає невідомою величиною, чим і створюється можливість зробити розв'язок системи рівнянь і вивести формули обчислення наступних інтервальних параметрів АД: корисна механічна (кінетична) енергія 2 в інтервальний електромагнітний ККД tp 2 2 1 0,5( в н )J tсг ; ЕМ н, в W ( н, в ) інтервальний механічний ККД t сг ; М н, в t сг tр н де 6 повна механічна енергія tp WМВ ( н, в ) 1 0,5( tсг 2 2 0,5( в н )J . W ( н, в ) Таким чином, якщо програма динамічних випробувань АД охоплює весь діапазон кутової швидкості 0 xx ( xx - це кутова швидкість холостого ходу), то по зареєстрованим миттєвим величинам функції потужності споживання енергії можливо обчислювати інтервальні ККД в різних межах кутової швидкості АД. Пропонуємий спосіб визначення інтервальних ККД АД підвищує точність і швидкодію обчислення втрат енергії, окремо в електромагнітній та механічній частинах, виявлення природи причини відхилення від нормативного значення загального ККД, контролювання технологічного процесу виготовлення та експлуатаційного стану АД. Все це створює економічний ефект у вигляді зниження собівартості виготовлення АД та витрат електроенергії під час його експлуатації. н, в 2 н )J; Комп’ютерна верстка Г. Паяльніков Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the efficiency of an asynchronous motor in specified operation modes
Автори англійськоюPodzharenko Volodymyr Oleksandrovych
Назва патенту російськоюСпособ определения коэффициента полезного действия асинронного электродвигателя в определенных режимах работы
Автори російськоюПоджаренко Владимир Александрович
МПК / Мітки
МПК: G01L 3/00
Мітки: корисної, асинхронних, інтервальних, визначення, спосіб, коефіцієнтів, двигунів, дії
Код посилання
<a href="https://ua.patents.su/3-12517-sposib-viznachennya-intervalnikh-koeficiehntiv-korisno-di-asinkhronnikh-dviguniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронних двигунів</a>
Спосіб моніторингу асинхронних двигунів і пристрій для його здійснення
Номер патенту: 64083
Опубліковано: 16.02.2004
Автори: Огарь Олександр Сергійович, Родькін Дмитро Йосипович, Чорний Олексій Петрович, Барвінок Дмитро Володимирович
МПК: G01R 31/34
Мітки: двигунів, спосіб, моніторингу, здійснення, пристрій, асинхронних
Формула / Реферат:
1. Спосіб моніторингу асинхронного двигуна, що включає підключення через комутуючі апарати і тиристорний регулятор напруги до трифазної мережі і вимірювання миттєвих значень струмів і напруг двигуна та розрахунок електричних параметрів, який відрізняється тим, що за даними миттєвих значень струмів і напруг двигуна розраховується миттєве значення споживаної потужності і за розрахованими величинами визначають рівень вібрації, який викликаний...
Спосіб випробування асинхронних двигунів
Номер патенту: 11264
Опубліковано: 15.12.2005
Автори: Муріков Дмитро Володимирович, Василега Петро Олександрович
МПК: G01R 31/34
Мітки: двигунів, випробування, спосіб, асинхронних
Формула / Реферат:
Спосіб випробування асинхронних двигунів, при якому подають напругу від регульованого джерела живлення на обмотку статора двигуна з незагальмованим ротором напруги промислової частоти в режимі холостого ходу при номінальних її значеннях, який відрізняється тим, що після подання напруги в подальшому здійснюють підвищення напруги, щоб по обмотках протікав струм, величина якого дорівнює номінальному значенню або перевищує це значення, регулюють...
Спосіб укладки одно-двушарових обмоток короткозамкнених асинхронних двигунів
Номер патенту: 25718
Опубліковано: 30.10.1998
Автор: Шкілько Григорій Яковлевич
МПК: H02K 15/04
Мітки: спосіб, одно-двушарових, укладки, короткозамкнених, асинхронних, обмоток, двигунів
Формула / Реферат:
Способ укладки одно-двухслойных обмоток короткозамкнутых асинхронных двигателей всыпанием через шлицы изолированных пазов поочередно каждого витка по укороченному шагу предварительно намотанных на шаблонах катушек, отличающийся тем, что без подъема шага на заключительной стадии укладки вразвалку катушечных групп, катушки распределяют по зубцовой зоне статора так, что в каждой фазе оказывается одинаковое количество больших и малых катушек, а...
Пристрій для моніторингу асинхронних двигунів
Номер патенту: 12182
Опубліковано: 16.01.2006
Автори: Грабко Володимир Віталійович, Мокін Борис Іванович, Розводюк Михайло Петрович
МПК: G01R 31/34
Мітки: моніторингу, двигунів, пристрій, асинхронних
Формула / Реферат:
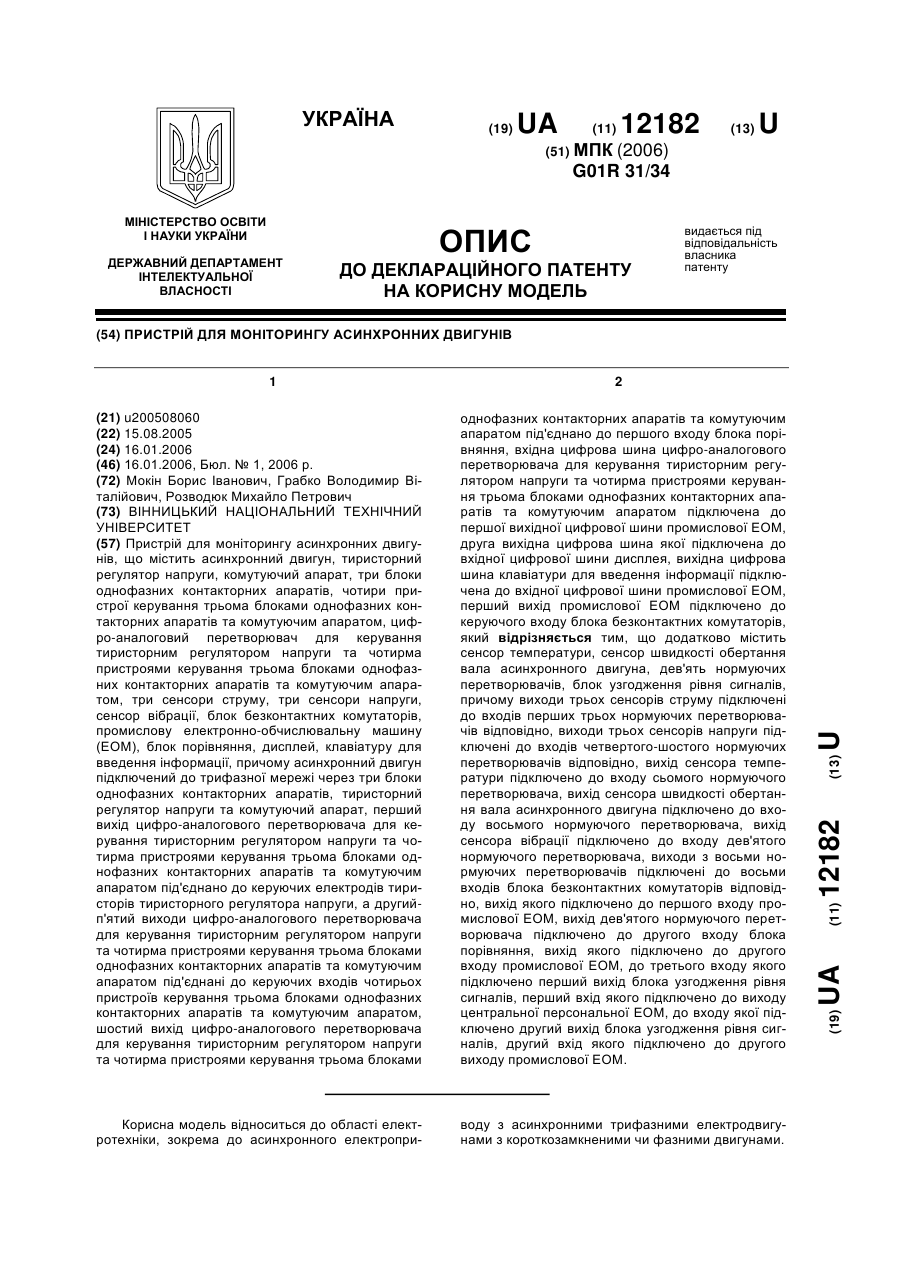
Пристрій для моніторингу асинхронних двигунів, що містить асинхронний двигун, тиристорний регулятор напруги, комутуючий апарат, три блоки однофазних контакторних апаратів, чотири пристрої керування трьома блоками однофазних контакторних апаратів та комутуючим апаратом, цифро-аналоговий перетворювач для керування тиристорним регулятором напруги та чотирма пристроями керування трьома блоками однофазних контакторних апаратів та комутуючим...
Пристрій для діагностики асинхронних двигунів з короткозамкненим ротором
Номер патенту: 49334
Опубліковано: 16.09.2002
Автори: Барвінок Дмитро Володимирович, Огарь Олександр Сергійович, Родькін Дмитро Йосипович, Чорний Олексій Петрович, Панченко Максим Вікторович
МПК: G01R 31/34
Мітки: пристрій, двигунів, діагностики, ротором, асинхронних, короткозамкненим
Формула / Реферат:
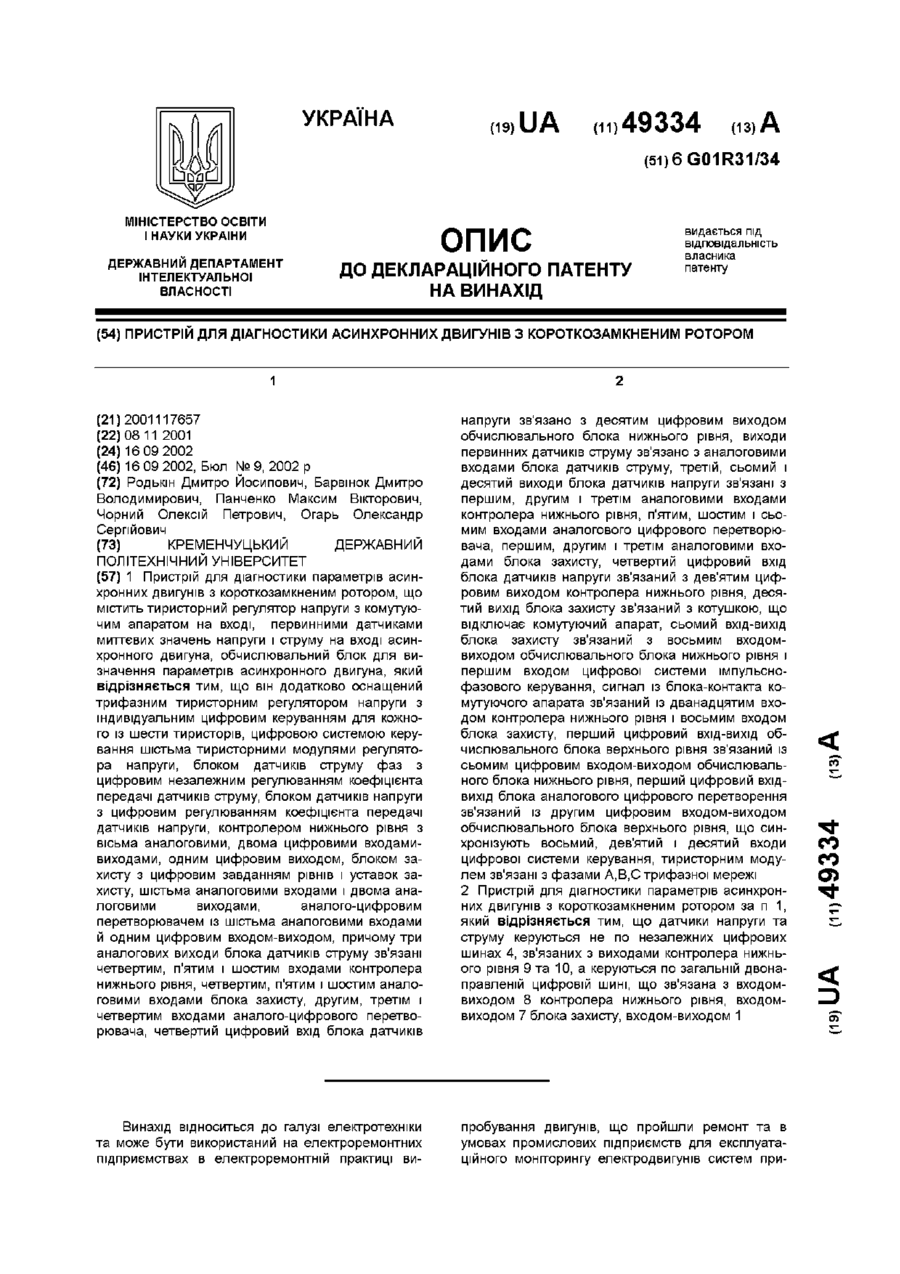
1. Пристрій для діагностики параметрів асинхронних двигунів з короткозамкненим ротором, що містить тиристорний регулятор напруги з комутуючим апаратом на вході, первинними датчиками миттєвих значень напруги і струму на вході асинхронного двигуна, обчислювальний блок для визначення параметрів асинхронного двигуна, який відрізняється тим, що він додатково оснащений трифазним тиристорним регулятором напруги з індивідуальним цифровим керуванням...
Попередній патент: Логічний елемент “або”
Наступний патент: Спосіб глибинного алмазно-електрохімічного шліфування
Випадковий патент: Спосіб запобігання рецидиву доброякісних пухлин кісток та пухлиноподібних захворювань