Спосіб високошвидкісного переміщення контактів в контактному вузлі комутаційного пристрою і пристрій для його реалізації
Формула / Реферат
1. Спосіб високошвидкісного переміщення контактів в контактному вузлі комутаційного пристрою, що містить щонайменше одну пластинчасту пружину, який включає зміну положення робочої частини цієї пружини шляхом прикладання зусилля, який відрізняється тим, що положення робочої частини пластинчастої пружини змінюють шляхом одночасного прикладання зусилля по різні боки робочої частини цієї пружини.
2. Спосіб за п. 1, який відрізняється тим, що зусилля прикладають в двох місцях, розміщених симетрично відносно робочої частини пластинчастої пружини.
3. Спосіб за п. 1, який відрізняється тим, що зусилля прикладають в чотирьох місцях, розміщених симетрично відносно робочої частини пластинчаcтої пружини.
4. Спосіб за пп. 1-3, який відрізняється тим, що прикладають прямолінійне зусилля.
5. Спосіб за пп. 1-3, який відрізняється тим, що прикладають зусилля по кривій обертально-поступального руху.
6. Пристрій високошвидкісного переміщення контактів у контактному вузлі комутаційного пристрою, що має корпус із привідним і обгінним механізмами, контактний вузол з нерухомими і рухомими контактами, щонайменше одну пластинчасту пружину з фіксаторами, робоча частина якої взаємозв'язана з рухомими контактами контактного вузла комутаційного пристрою через діелектричне ярмо, а також пари штовхачів, з'єднаних із привідним механізмом через обгінний механізм, який відрізняється тим, що оснащений щонайменше двома взаємозв'язаними між собою парами штовхачів, розміщеними по різні боки відносно робочої частини пластинчастої пружини.
7. Пристрій за п. 6, який відрізняється тим, що пластинчаста пружина виконана у вигляді набору пластинчастих пружин, що мають по одному загальному фіксатору біля їхніх протилежних кінців.
8. Пристрій за пп. 6, 7, який відрізняється тим, що для виконання функції штовхачів фіксатори установлені в корпусі з можливістю повороту кожного з них відносно осі кріплення фіксаторів.
9. Пристрій за пп. 6-8, який відрізняється тим, що для синхронної роботи пар штовхачів введений механічний зв'язок між ними.
Текст
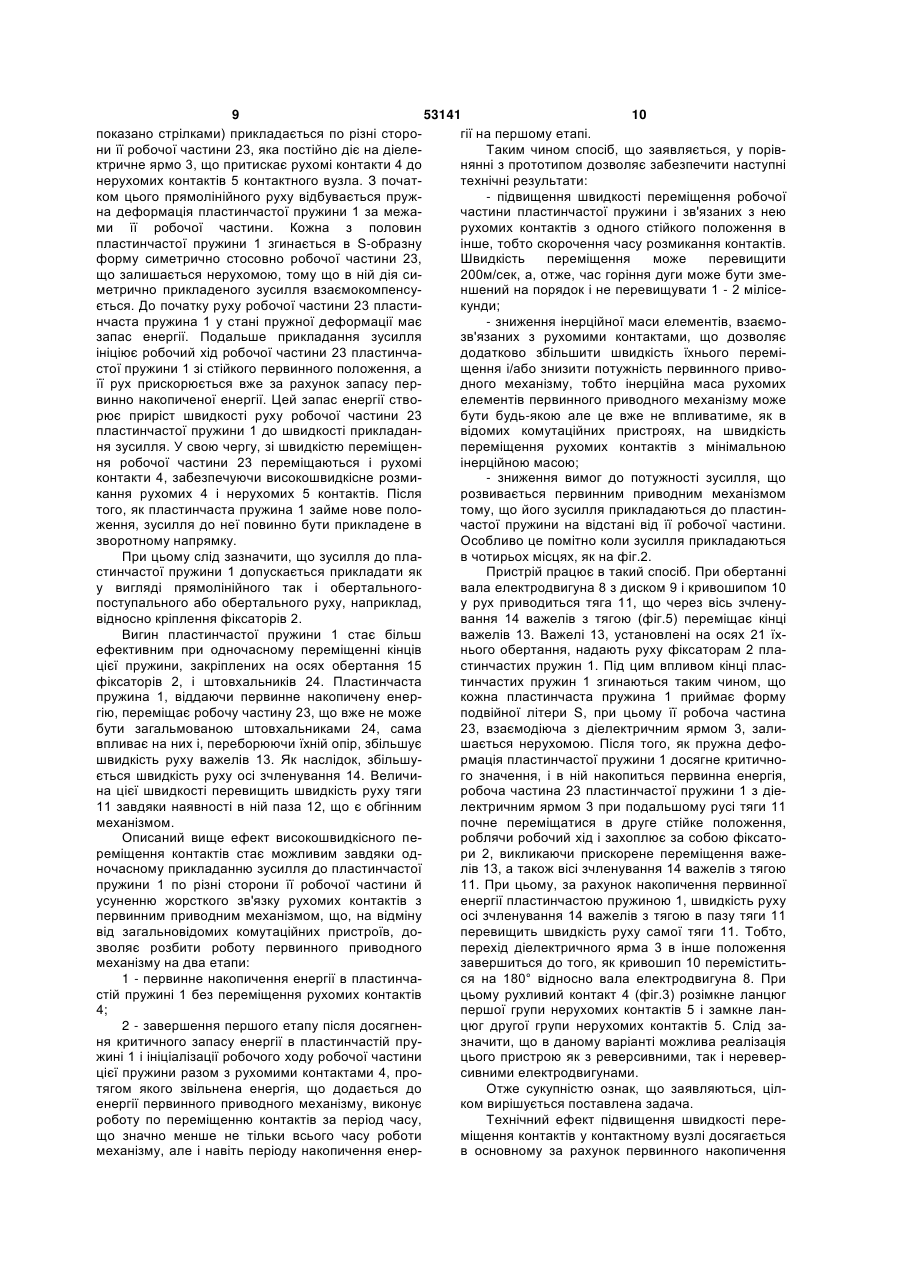
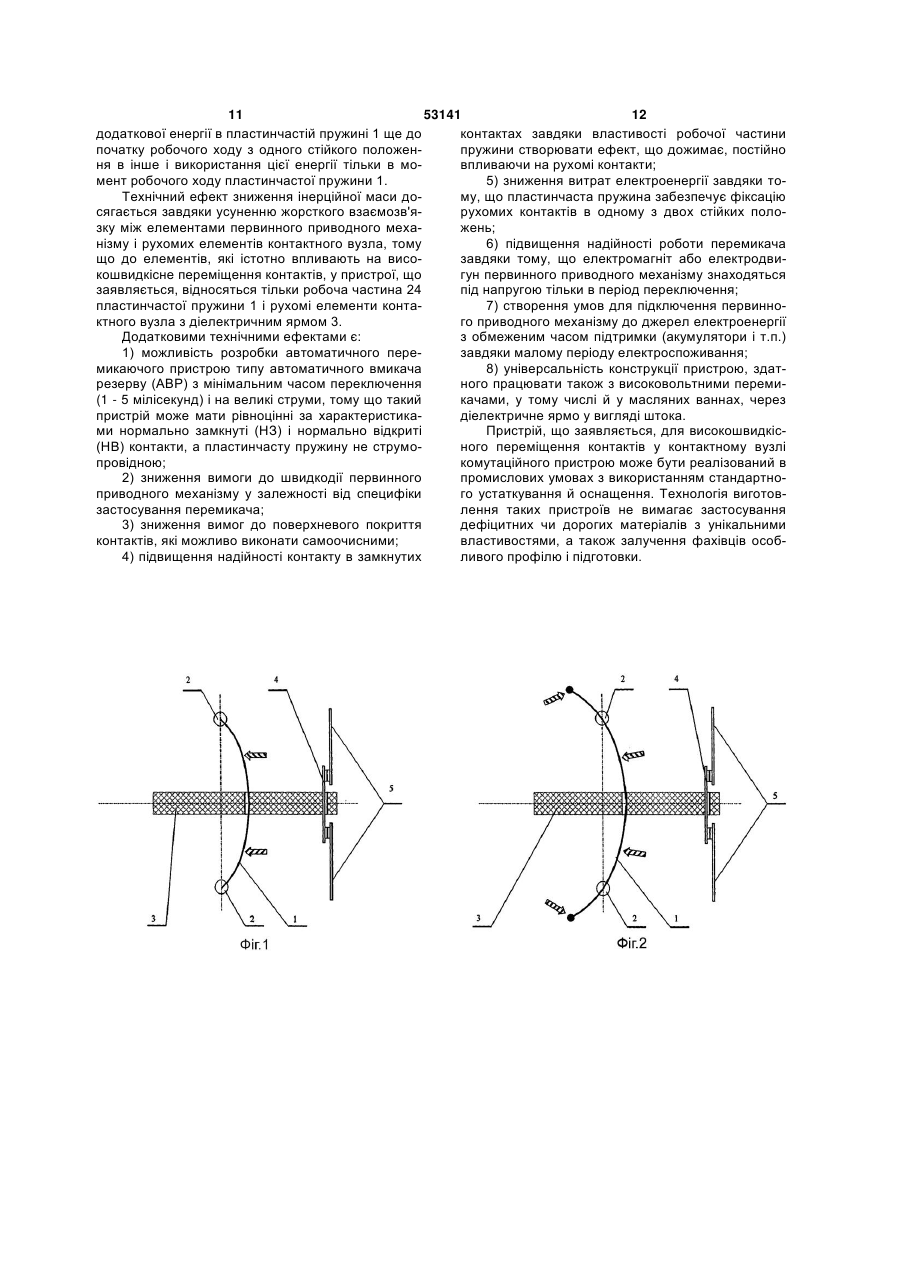
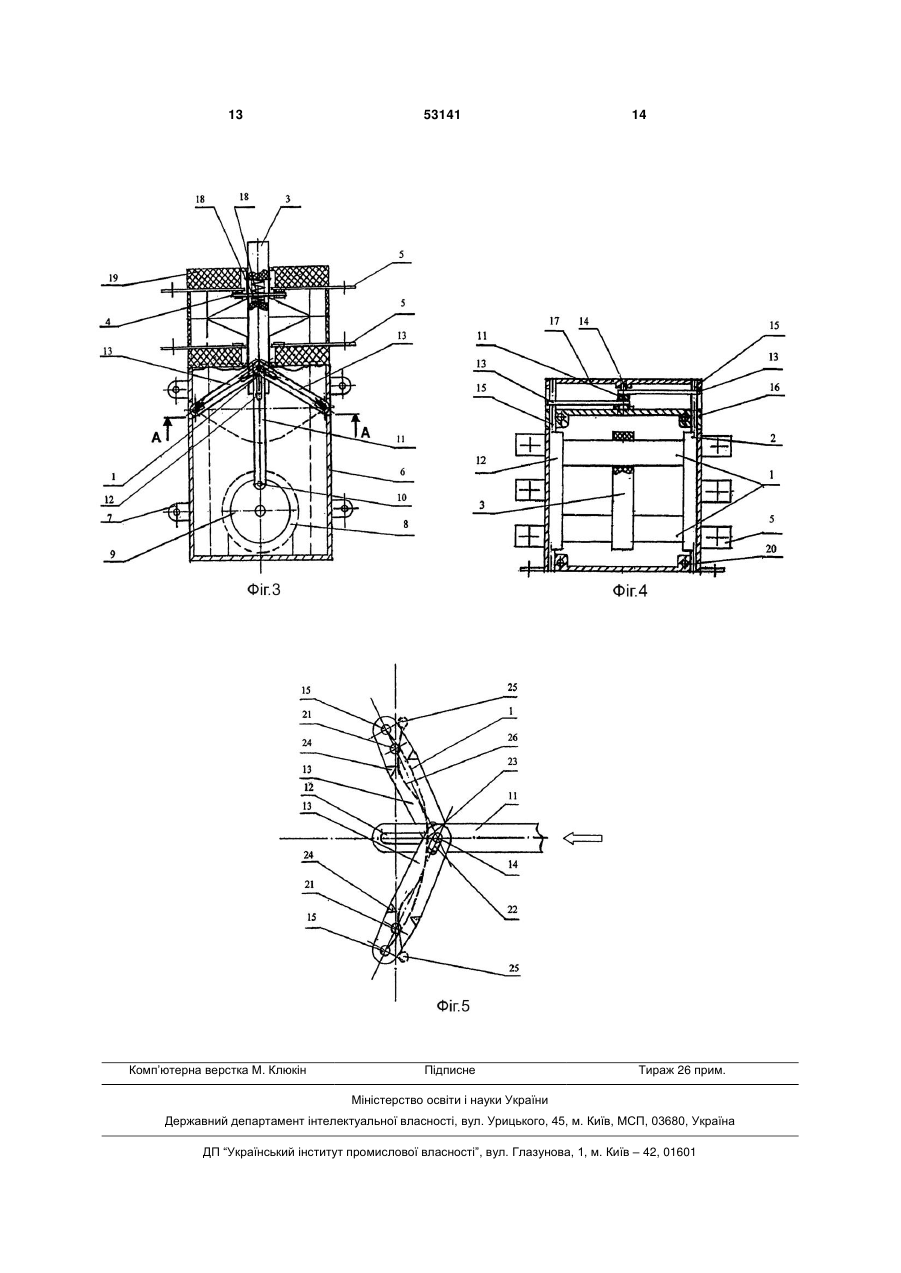
1.Спосіб високошвидкісного переміщення контактів в контактному вузлі комутаційного пристрою, що містить щонайменше одну пластинчасту пружину, який включає зміну положення робочої частини цієї пружини шляхом прикладання зусилля, що відрізняється тим, що положення робочої частини пластинчастої пружини змінюють шляхом одночасного прикладання зусилля по різні сторони робочої частини цієї пружини. 2.Спосіб за п. 2, який відрізняється тим, що зусилля прикладають в двох місцях, розміщених симетрично відносно робочої частини пластинастої пружини. 3.Спосіб за п. 1, який відрізняється тим, що зусилля прикладають в чотирьох місцях, розміщених симетрично відносно робочої частини пластинчастої пружини. 4.Спосіб за пп. 1, 2, 3, який відрізняється тим, що зусиллю, яке прикладають, задають прямолінійне переміщення. C2 2 (13) 1 В 53141 ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ 3 53141 4 приводного механізму (електромагніта) на рухомі серединою. Фактично в одному пристрої об'єднані контакти протягом усього періоду переміщення. два ідентичних перемикачі, що працюють у проТобто, рухомі контакти повторюють рух рухомого тифазі, кожний з яких має свій рухомий контакт на сегмента магнітопроводу електромагніта за часом пластинчастій пружині і, отже, мається дві робочі і траєкторією. частини пластинчатої пружини. Прикладання зуОднак ці способи і пристрої мають недоліки, силля первинного приводного механізму через що знижують їхні технічні характеристики. штовхальник до однієї половини пластинчастої Одним з таких недоліків є неможливість знипружини викликає адекватне переміщення продоження часу горіння дуги, обумовленого неможливження цієї пружини в іншій частині пристрою. Це вістю збільшення швидкості переміщення рухомозабезпечує розмикання (замикання) контактів у тій го сегмента магнітопроводу електромагніта, що частині перемикача, у якій виконувалося прикламає велику інерційну масу, та жорстко зв'язаних з дання зусилля до пластинчатої пружини, і заминим рухомих контактів. Реально, мінімальний час кання (розмикання) контактів у сусідній частині горіння дуги складає в таких пристроях 10 - 15 перемикача. мілісекунд [SIEMENS. Комутаційні апарати і сисСпосіб у даному випадку полягає в тому, що теми. Каталог 1997/98. Стр. 2/24]. Тобто, протягом зусилля прикладають одночасно несиметрично цього досить значного часу контакти піддаються щодо кожної робочої частини пластинчатої пружинайбільшому зносу, що істотно впливає на довгони до одного місця поблизу зафіксованої середини вічність поверхні контактів і надійність електропоспластинчастої пружини поперемінно до кожної з її тачання споживачів. половин. Такий спосіб і пристрій для його реалізаПро актуальність цієї проблеми свідчить ряд ції забезпечують високу швидкість замикання конвинаходів, спрямованих на її вирішення, напритактів. Пристрій має малу інерційну масу рухомих клад, спеціальний спосіб управління дугогасильчастин через відсутність діелектричного ярма та ною котушкою [Пат. Росії № 2153727 Н01Н 9/30, важких елементів первинного приводного механіН01Н 9/38, 2000), конструкція дугогасильного елезму. мента (Пат. Росії № 2149475 Н01Н 9/30, Н01Н Однак швидкість розмикання контактів у дано1/20, 2000] і ін. му випадку визначається швидкістю прикладання До інших недоліків комутаційних пристроїв тазусилля до пластинчастої пружини, що і визначає кого типу варто віднести: час горіння дуги. Крім цього, сама пластинчаста - необхідність споживання електроенергії на пружина є струмопровідною і, у силу цього, приутримання контактів у включеному стані; строї такого типу можуть використовуватися тільки - зниження зусилля притиснення контактів при при малих струмах навантаження, що є основним зниженні напруги живлення, що призводить до недоліком більшості відомих конструкцій із пласдодаткового зносу контактів. тинчастою пружиною. Ці недоліки намагалися усувати шляхом устаНайбільш близькими до винаходу, що заявляновки механічного фіксатора з додатковими прується, є спосіб і пристрій високошвидкісного пережиною та електромагнітною котушкою [Пат. Росії міщення контактів у контактному вузлі комутацій№ 93003716 Н01Н 3/54, 1995]. Однак і ці спроби ного пристрою [Пат. США 4,123,638 Н01Н 3/00, US кардинально не усунули першопричин зазначених СІ. 200/153G, 200/257, 200/260,1978]. вище недоліків. Пристрій містить корпус із приводним і обгінБезумовно, що головною причиною цих недоним механізмами, контактний вузол з нерухомими і ліків є протиріччя, у першу чергу, між вимогами до рухомими контактами, дві пластинчасті пружини з зусилля, що розвивається гвинтовою пружиною фіксаторами, робоча частина яких взаємозв'язана (воно повинно бути як можна більшим) і споживаз рухомими контактами контактного вузла комутаною потужністю електромагніта (вона повинна буційного пристрою через діелектричне ярмо, а тати якнайменшою). Одним зі шляхів усунення цього кож пари штовхальників для кожної пластинчастої протиріччя є використання пружини з іншими влапружини, конструктивно об'єднаних з діелектричстивостями й усунення жорсткого взаємозв'язку ним ярмом і з'єднаних з приводним механізмом між рухомими контактами і первинним приводним через обгінний механізм. механізмом. Даний пристрій реалізує спосіб високошвидкіВідома велика кількість комутаційних пристросного переміщення контактів, який полягає в тому, їв, наприклад, перемикачів з використанням пласщо положення робочої частини пластинчастої тинчастих пружин, що забезпечують високу швидпружини змінюють шляхом прикладання зусилля кість переключення і фіксацію контактів у первинного приводного механізму одночасно до включеному чи виключеному положенні. Найбільдіелектричного ярма і, через штовхальники, до ший інтерес представляють перемикачі з пластинодного місця кожної пластинчастої пружини, а сачастою пружиною, робочою частиною якої, як праме, до її робочої частини. При цьому штовхальнивило, є її середня частина, взаємозв'язана з ки та діелектричне ярмо, до якого механічно закрірухомими контактами і переміщувана на найбільплено рухомі контакти, виконані як єдина шу відстань, ніж будь-яка інша її частина. конструкція. У патенті Німеччини [DE 4223077, Н01Н 1/26, Отже, цей спосіб високошвидкісного переміН01Н 5/18, Н01Н 13/68, 1994] запропоновано спощення контактів забезпечує їхню фіксацію в стійсіб переміщення контактів у контактному вузлі кокому стані і не призначений для накопичення пермутаційного пристрою і пристрій для його здійсвинної додаткової енергії в пластинчастих нення, у якому рухомі контакти змонтовані на пружинах з моменту прикладання зусилля до мопластинчастій пружині з фіксованими кінцями і менту початку руху рухомих контактів, тому, що 5 53141 6 між рухомими контактами і штовхальниками існує змом. жорсткий взаємозв'язок. Отже, час горіння дуги в цих пристроях, обуДіелектричне ярмо в цьому пристрої, має момовлений часом розмикання контактів і залежний жливість реверсивного переміщення усередині від швидкості прикладання зусилля первинного корпуса уздовж однієї осі, через яку проходять дві приводного механізму, фактично не зменшиться в пластинчасті пружини, паралельні між собою і ропорівнянні з загальновідомими комутаційними знесені на різні половини діелектричного ярма. пристроями. Кінці пластинчастих пружин з фіксаторами спираІншим недоліком прототипу є необхідність ються на гвинтові пружини. Робоча частина (сереприкладання значного зусилля для переміщення дина) кожної пластинчастої пружини охоплена робочої частини пластинчастої пружини, тому що парою штовхальників первинного приводного мештовхальникам у найбільшій мірі протидіє пружханізму, що закріплені між широкими стінками діеність пластинчастої пружини саме в її робочій часлектричного ярма. Важіль ручного первинного тині. У прототипі вплив цього недоліку зменшено приводного механізму, проходить через ті ж стозавдяки гвинтовим пружинам, на які спираються рони діелектричного ярма, що і пластинчасті прукінці пластинчастих пружин з фіксаторами. Тобто, жини, і один його кінець закріплений на осі посетакий спосіб переміщення контактів вимагає до редині щодо пластинчастих пружин і на відстані того ж, щонайменше, спільного застосування плавід діелектричного ярма. При прикладанні зусилля стинчастих і гвинтових пружин. на інший кінець важеля ручного первинного приЗазначений вище недолік - залежність швидводного механізму воно передається на діелекткості переміщення контактів від швидкості прикларичне ярмо. Паз у діелектричному ярмі, у межах дання зусилля первинного приводного механізму якого можливе переміщення важеля, є обгінним характерний для всіх комутаційних пристроїв (вимеханізмом, який починає виконувати свою функмикачів, перемикачів і т.п.) із пластинчастою пруцію після того, як робоча частина пластинчастої жиною, у яких зусилля прикладається до робочої пружини переміститься не менше 50% свого шлячастини пластинчастої пружини або несиметрично ху, тобто ввійде в фазу замикання контактів. Діещодо неї. В свою чергу, на швидкодію первинного лектричне ярмо жорстко з'єднано з рухомимиконприводного механізму впливає інерційна маса йотактами. Безперечно, що початок розмикання го рухомих елементів. Тому приходимо до висновконтактів фактично збігається з початком руху діеку, що оптимальним буде пристрій, в якому швидлектричного ярма, до того як буде цілком перебокість переміщення рухомих контактів з механічно рено опір пластинчастих пружин. Тобто, існує ймопов'язаними елементами не буде залежати від вірність того, що при припиненні прикладання швидкості переміщення та інерційної маси рухозусилля до важелю у деякий момент часу, коли мих елементів, які можливо віднести до первинноконтакти вже розімкнуті, але опір пружини цілком го приводного механізму. Проявленням такої нене переборено, рухомі контакти можуть повернузалежності буде різниця їх переміщення у часі, тися у вихідне положення. тобто у швидкості. Отже, швидкість розмикання контактів, і, відВ основу винаходу поставлена задача розробповідно, час горіння дуги, цілком визначається ки такого способу високошвидкісного переміщення швидкістю руху важеля, що впливає на діелектриконтактів у контактному вузлі комутаційного причне ярмо, жорстко взаємозв'язане з рухомими констрою і пристрою для його реалізації, що дозволитактами. ли б підвищити швидкість переміщення контактів у Таким чином, при високій швидкості переклюконтактному вузлі комутаційного пристрою за рачення, яку здатні забезпечити пластинчасті пружихунок підвищення швидкості руху діелектричного ни, у розглянутих пристроях існує обмеження на ярма з рухомими контактами, переміщуваного ромаксимальну швидкість переміщення контактів, бочою частиною пластинчастої пружини, а також особливо в найбільш важливій, початковій, фазі, дозволили б знизити інерційну масу рухомих елеколи вона не може перевищувати швидкість руху ментів, жорстко взаємозв'язаних з рухомими конробочого елемента первинного приводного мехатактами. нізму - руки, рухомого сегмента магнітопроводу Поставлена задача вирішується способом виелектромагніта і т.п. сокошвидкісного переміщення контактів у контактТому швидкодія комутаційних пристроїв із них вузлах комутаційних пристроїв і пристроєм пластинчастими пружинами у фазі розмикання для реалізації цього способу, що об'єднані єдиним контактів фактично дорівнює швидкодії первинного винахідницьким задумом. приводного механізму, тому що наростання швидЗгідно способу поставлена задача вирішується кості руху рухомих контактів на заключній фазі тим, що в способі високошвидкісного переміщення (замиканні), коли переборено опір пластинчастої контактів у контактному вузлі комутаційного припружини, не встигає проявитися і вже не предстастрою, що містить, щонайменше, одну пластинчавляє особливого інтересу. І якщо швидкодія цього сту пружину, який включає зміну положення робопристрою дорівнює швидкодії первинного приводчої частини цієї пружини шляхом прикладання ного механізму, то для нього суттєвим буде наявзусилля, пропонується змінювати положення роність елементів механізму з великою інерційною бочої частини пластинчастої пружини шляхом одмасою, які і будуть визначати швидкодію пристрою ночасного прикладання зусилля по різні сторони вцілому. Але позитивним в цьому пристрої є те, робочої частини цієї пружини. що застосовано обгінний механізм, яких порушує Основною особливістю способу є те, що зажорсткий взаємозв'язок рухомих контактів та діезначене зусилля прикладається одночасно не лектричного ярма з первинним приводним механіменш, ніж до двох місць пластинчастої пружини по 7 53141 8 різні сторони від її робочої частини. Це спочатку схематично представлений спосіб, що заявляєтьзабезпечує накопичення енергії у вигляді пружної ся (прикладання зусиль у двох місцях); на фіг.2 деформації пластинчастої пружини за межами її варіант способу, що заявляється (прикладання робочої частини, в якій це зусилля взаємно компезусиль у чотирьох місцях); на фіг.3 - схема принсується до початку її робочого ходу, а надалі, з строю високошвидкісного переміщення контактів у початком робочого ходу, зініційованого зазначеконтактному вузлі комутаційного пристрою; на ним зусиллям, відбувається нарощування швидкофіг.4 - розріз по А-А фіг.3; на фіг.5 - важільна сиссті робочої частини пластинчастої пружини за ратема зі штовхальниками первинного приводного хунок накопиченої енергії. При відсутності механізму. жорсткого механічного зв'язку первинного приводПристрій високошвидкісного переміщення конного механізму зі штовхальниками і/або з пластинтактів у контактному вузлі комутаційного пристрою частою пружиною завдяки обгінному механізму, включає пластинчасту пружину 1 (фіг.1 - 5) з фікрух робочої частини пластинчастої пружини і взасаторами 2 (фіг.1, 2, 4), розташованими у її кінців. ємозв'язаних з нею через діелектричне ярмо руПластинчаста пружина 1 своєю робочою частиною хомих контактів у нове стійке положення уже на стикається з діелектричним ярмом 3 (фіг.1 - 4), у фазі розмикання контактів відбувається зі швидкісякому, у свою чергу, установлені рухомі контакти 4 тю, що перевищує швидкість прикладання зусил(фіг.1 - 3) контактного вузла, що замикають ланцюг ля. нерухомих контактів 5 (фіг.1 - 4) цього вузла. КонЗусилля штовхальників може прикладатися в тактний вузол утворений рухомими 4 і нерухомими двох, чотирьох і більш місцях, розміщених симет5 контактами і, при необхідності, може бути доповрично щодо робочої частини пластинчастої прунений дугогасильними елементами, демпферами і жини; а прикладеному зусиллю може бути задане т.п. (на кресленнях не показані). прямолінійне або обертально-поступальне переУ корпусі 6 (фіг.3), оснащеному елементами міщення. кріплення 7 розміщений первинний приводний Для реалізації способу, що заявляється, автор механізм, до складу якого входять: електродвигун пропонує пристрій високошвидкісного переміщен8 з диском 9. На диску 9 установлений кривошип ня контактів у контактному вузлі комутаційного 10 для кріплення тяги 11, яка має паз 12 і зчленопристрою, що включає корпус із приводним і обгінвана з важелями 13 за допомогою осі зчленування ним механізмами, контактний вузол з нерухомими і 14 (фіг.4). Важелі 13 закріплені відповідно на осях рухомими контактами, щонайменше, одну пластиобертання 15 (фіг.4, 5) фіксаторів 2, що виконують нчасту пружину з фіксаторами, робоча частина роль штовхальників. На осях обертання 15 фіксаякої взаємозв'язана з рухомими контактами контаторів 2 закріплені пластинчасті пружини 1. Осі ктного вузла комутаційного пристрою через діелеобертання 15 фіксаторів 2 проходять через корпус ктричне ярмо, а також пари штовхальників, з'єдна6 і кришку 16 (фіг.4) первинного приводного механих із приводним механізмом через обгінний нізму, яка закрита захисною кришкою 17. У свою механізм, оснастити, щонайменше, двома взаємочергу, пластинчаста пружина 1 проходить через зв'язаними між собою парами штовхальників, роздіелектричне ярмо 3, у якому між пружинами, що міщених по різні сторони щодо робочої частини демпфірують, 18 (фіг.3) установлені рухомі контакпластинчастої пружини. ти 4. Нерухомі контакти 5 встановлені в діелектриКонструктивно даний пристрій може бути реачному корпусі 19 контактного вузла. Корпус перлізований в різних варіантах, які відрізняються винного приводного механізму 6 зібраний з тим, що: діелектричним корпусом 19 контактного вузла за - пластинчаста пружина може бути виконана у допомогою чотирьох шпильок 20 (фіг.4). вигляді набору пластинчастих пружин, що мають На фіг.5 представлена важільна система з вапо одному загальному фіксатору біля їхніх протижелями 13, що мають можливість повороту щодо лежних кінців; своїх осей обертання 21. Кінці важелів 13 взаємо- для виконання функції штовхальників фіксазв'язані між собою віссю 14, розташованою в пазах тори можуть бути встановлені в корпусі з можливі22, і тягою 11. На протилежних кінцях важелів 13 стю повороту кожного щодо осі обертання; встановлені осі обертання 15 фіксаторів 2, що фік- для синхронної роботи пар штовхальників сують кінці пластинчастої пружини 1, робоча (семоже бути введений механічний зв'язок між ними. редня) частина 23 якої знаходиться в стійкому Спосіб високошвидкісного переміщення контастані. На важелях 13 установлені пари штовхальктів приводними механізмами комутаційних приників 24, що обмежують пластинчасту пружину 1 із строїв, що заявляється, відкриває широкі можлидвох сторін і розташовані на ділянці важелів 13 вості в конструюванні таких пристроїв і досягненні між їхніми осями обертання 21 і віссю зчленування при цьому більш високих технічних та економічних 14 важелів з тягою. У первісний момент часу, на характеристик. Ці можливості продемонстровані етапі нагромадження енергії, осі обертання 15 різними варіантами реалізації способу і пристрою, фіксаторів 2 займуть положення 25, а пластинчасщо заявляються. Кількість цих варіантів може бути та пружина 1 частково переміститься в положення збільшена, наприклад, для випадку, коли первин26. ним приводним механізмом є один електромагніт При реалізації запропонованого способу висо(соленоїд) і напрямок руху його сердечника перпекошвидкісного переміщення контактів у контактнондикулярний до напрямку руху рухомих контактів. му вузлі комутаційного пристрою у випадку прикАле всі ці варіанти будуть лише розвитком спосоладання зусиль до пластинчастої пружини 1 у двох бу, що заявляється. місцях (фіг.1) зусилля від первинного приводного Винахід пояснюється кресленнями, де на фіг.1 механізму у вигляді прямолінійного руху (як це 9 53141 10 показано стрілками) прикладається по різні сторогії на першому етапі. ни її робочої частини 23, яка постійно діє на діелеТаким чином спосіб, що заявляється, у порівктричне ярмо 3, що притискає рухомі контакти 4 до нянні з прототипом дозволяє забезпечити наступні нерухомих контактів 5 контактного вузла. З початтехнічні результати: ком цього прямолінійного руху відбувається пруж- підвищення швидкості переміщення робочої на деформація пластинчастої пружини 1 за межачастини пластинчастої пружини і зв'язаних з нею ми її робочої частини. Кожна з половин рухомих контактів з одного стійкого положення в пластинчастої пружини 1 згинається в S-образну інше, тобто скорочення часу розмикання контактів. форму симетрично стосовно робочої частини 23, Швидкість переміщення може перевищити що залишається нерухомою, тому що в ній дія си200м/сек, а, отже, час горіння дуги може бути змеметрично прикладеного зусилля взаємокомпенсуншений на порядок і не перевищувати 1 - 2 мілісеється. До початку руху робочої частини 23 пластикунди; нчаста пружина 1 у стані пружної деформації має - зниження інерційної маси елементів, взаємозапас енергії. Подальше прикладання зусилля зв'язаних з рухомими контактами, що дозволяє ініціює робочий хід робочої частини 23 пластинчадодатково збільшити швидкість їхнього перемістої пружини 1 зі стійкого первинного положення, а щення і/або знизити потужність первинного привоїї рух прискорюється вже за рахунок запасу пердного механізму, тобто інерційна маса рухомих винно накопиченої енергії. Цей запас енергії ствоелементів первинного приводного механізму може рює приріст швидкості руху робочої частини 23 бути будь-якою але це вже не впливатиме, як в пластинчастої пружини 1 до швидкості прикладанвідомих комутаційних пристроях, на швидкість ня зусилля. У свою чергу, зі швидкістю переміщенпереміщення рухомих контактів з мінімальною ня робочої частини 23 переміщаються і рухомі інерційною масою; контакти 4, забезпечуючи високошвидкісне розми- зниження вимог до потужності зусилля, що кання рухомих 4 і нерухомих 5 контактів. Після розвивається первинним приводним механізмом того, як пластинчаста пружина 1 займе нове полотому, що його зусилля прикладаються до пластинження, зусилля до неї повинно бути прикладене в частої пружини на відстані від її робочої частини. зворотному напрямку. Особливо це помітно коли зусилля прикладаються При цьому слід зазначити, що зусилля до плав чотирьох місцях, як на фіг.2. стинчастої пружини 1 допускається прикладати як Пристрій працює в такий спосіб. При обертанні у вигляді прямолінійного так і обертальноговала електродвигуна 8 з диском 9 і кривошипом 10 поступального або обертального руху, наприклад, у рух приводиться тяга 11, що через вісь зчленувідносно кріплення фіксаторів 2. вання 14 важелів з тягою (фіг.5) переміщає кінці Вигин пластинчастої пружини 1 стає більш важелів 13. Важелі 13, установлені на осях 21 їхефективним при одночасному переміщенні кінців нього обертання, надають руху фіксаторам 2 плацієї пружини, закріплених на осях обертання 15 стинчастих пружин 1. Під цим впливом кінці пласфіксаторів 2, і штовхальників 24. Пластинчаста тинчастих пружин 1 згинаються таким чином, що пружина 1, віддаючи первинне накопичену енеркожна пластинчаста пружина 1 приймає форму гію, переміщає робочу частину 23, що вже не може подвійної літери S, при цьому її робоча частина бути загальмованою штовхальниками 24, сама 23, взаємодіюча з діелектричним ярмом 3, заливпливає на них і, переборюючи їхній опір, збільшує шається нерухомою. Після того, як пружна дефошвидкість руху важелів 13. Як наслідок, збільшурмація пластинчастої пружини 1 досягне критичноється швидкість руху осі зчленування 14. Величиго значення, і в ній накопиться первинна енергія, на цієї швидкості перевищить швидкість руху тяги робоча частина 23 пластинчастої пружини 1 з діе11 завдяки наявності в ній паза 12, що є обгінним лектричним ярмом 3 при подальшому русі тяги 11 механізмом. почне переміщатися в друге стійке положення, Описаний вище ефект високошвидкісного пероблячи робочий хід і захоплює за собою фіксатореміщення контактів стає можливим завдяки одри 2, викликаючи прискорене переміщення важеночасному прикладанню зусилля до пластинчастої лів 13, а також вісі зчленування 14 важелів з тягою пружини 1 по різні сторони її робочої частини й 11. При цьому, за рахунок накопичення первинної усуненню жорсткого зв'язку рухомих контактів з енергії пластинчастою пружиною 1, швидкість руху первинним приводним механізмом, що, на відміну осі зчленування 14 важелів з тягою в пазу тяги 11 від загальновідомих комутаційних пристроїв, доперевищить швидкість руху самої тяги 11. Тобто, зволяє розбити роботу первинного приводного перехід діелектричного ярма 3 в інше положення механізму на два етапи: завершиться до того, як кривошип 10 перемістить1 - первинне накопичення енергії в пластинчася на 180° відносно вала електродвигуна 8. При стій пружині 1 без переміщення рухомих контактів цьому рухливий контакт 4 (фіг.3) розімкне ланцюг 4; першої групи нерухомих контактів 5 і замкне лан2 - завершення першого етапу після досягненцюг другої групи нерухомих контактів 5. Слід заня критичного запасу енергії в пластинчастій прузначити, що в даному варіанті можлива реалізація жині 1 і ініціалізації робочого ходу робочої частини цього пристрою як з реверсивними, так і нереверцієї пружини разом з рухомими контактами 4, просивними електродвигунами. тягом якого звільнена енергія, що додається до Отже сукупністю ознак, що заявляються, ціленергії первинного приводного механізму, виконує ком вирішується поставлена задача. роботу по переміщенню контактів за період часу, Технічний ефект підвищення швидкості перещо значно менше не тільки всього часу роботи міщення контактів у контактному вузлі досягається механізму, але і навіть періоду накопичення енерв основному за рахунок первинного накопичення 11 53141 12 додаткової енергії в пластинчастій пружині 1 ще до контактах завдяки властивості робочої частини початку робочого ходу з одного стійкого положенпружини створювати ефект, що дожимає, постійно ня в інше і використання цієї енергії тільки в мовпливаючи на рухомі контакти; мент робочого ходу пластинчастої пружини 1. 5) зниження витрат електроенергії завдяки тоТехнічний ефект зниження інерційної маси дому, що пластинчаста пружина забезпечує фіксацію сягається завдяки усуненню жорсткого взаємозв'ярухомих контактів в одному з двох стійких полозку між елементами первинного приводного мехажень; нізму і рухомих елементів контактного вузла, тому 6) підвищення надійності роботи перемикача що до елементів, які істотно впливають на висозавдяки тому, що електромагніт або електродвикошвидкісне переміщення контактів, у пристрої, що гун первинного приводного механізму знаходяться заявляється, відносяться тільки робоча частина 24 під напругою тільки в період переключення; пластинчастої пружини 1 і рухомі елементи конта7) створення умов для підключення первинноктного вузла з діелектричним ярмом 3. го приводного механізму до джерел електроенергії Додатковими технічними ефектами є: з обмеженим часом підтримки (акумулятори і т.п.) 1) можливість розробки автоматичного перезавдяки малому періоду електроспоживання; микаючого пристрою типу автоматичного вмикача 8) універсальність конструкції пристрою, здатрезерву (АВР) з мінімальним часом переключення ного працювати також з високовольтними переми(1 - 5 мілісекунд) і на великі струми, тому що такий качами, у тому числі й у масляних ваннах, через пристрій може мати рівноцінні за характеристикадіелектричне ярмо у вигляді штока. ми нормально замкнуті (НЗ) і нормально відкриті Пристрій, що заявляється, для високошвидкіс(НВ) контакти, а пластинчасту пружину не струмоного переміщення контактів у контактному вузлі провідною; комутаційного пристрою може бути реалізований в 2) зниження вимоги до швидкодії первинного промислових умовах з використанням стандартноприводного механізму у залежності від специфіки го устаткування й оснащення. Технологія виготовзастосування перемикача; лення таких пристроїв не вимагає застосування 3) зниження вимог до поверхневого покриття дефіцитних чи дорогих матеріалів з унікальними контактів, які можливо виконати самоочисними; властивостями, а також залучення фахівців особ4) підвищення надійності контакту в замкнутих ливого профілю і підготовки. 13 Комп’ютерна верстка М. Клюкін 53141 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for fast moving contacts of a switching unit and a device for the realization of the method
Автори англійськоюLoza Viktor Mykhailovych
Назва патенту російськоюСпособ быстрого перемещения контактов коммутационного аппарата и устройство для осуществления способа
Автори російськоюЛоза Виктор Михайлович
МПК / Мітки
МПК: H01H 5/00
Мітки: високошвидкісного, спосіб, вузлі, комутаційного, пристрою, контактів, реалізації, пристрій, контактному, переміщення
Код посилання
<a href="https://ua.patents.su/7-53141-sposib-visokoshvidkisnogo-peremishhennya-kontaktiv-v-kontaktnomu-vuzli-komutacijjnogo-pristroyu-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб високошвидкісного переміщення контактів в контактному вузлі комутаційного пристрою і пристрій для його реалізації</a>
Спосіб переміщення вершини різця по розрахунковій траєкторії та пристрій для його реалізації
Номер патенту: 52335
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 5/00
Мітки: переміщення, спосіб, траєкторії, розрахунковій, різця, вершини, реалізації, пристрій
Формула / Реферат:
1. Спосіб переміщення вершини різця по розрахунковій траєкторії, що включає установлення вершини різця в початкову точку розрахункової траєкторії, розрахунок приростів координати "У" вершини різця на дискретах розрахункової траєкторії, завдання на дискретах траєкторії переміщення вершини різця по координаті "X" розрахункових приростів координати "У" вершини різця, який відрізняється тим, що в процесі переміщення...
Спосіб зміни орієнтації робочої області радіотелефону і радіотелефон для його реалізації
Номер патенту: 46599
Опубліковано: 15.05.2002
Автор: Гнатенко Віталій Іванович
МПК: H04B 1/38
Мітки: області, зміни, реалізації, радіотелефон, радіотелефону, орієнтації, робочої, спосіб
Формула / Реферат:
1. Спосіб зміни орієнтації робочої області радіотелефону, у якому дисплей і модуль символьної клавіатури виконані у вигляді окремих елементів, що полягає в зміні напрямку «верх-низ» зображення на дисплеї радіотелефону, який відрізняється тим, що, поряд зі зміною напрямку «верх-низ» зображення на дисплеї радіотелефону, виконують поворот символів на клавішах символьної клавіатури радіотелефону так, що напрямки «верх-низ» зображення на дисплеї і...
Спосіб визначення липкості фотополімеризаційноздатних матеріалів і пристрій для його реалізації
Номер патенту: 73325
Опубліковано: 15.07.2005
Автори: Шибанов Володимир Вікторович, Стахіра Віра Михайлівна, Репета Вячеслав Богданович
МПК: G01N 19/00
Мітки: спосіб, фотополімеризаційноздатних, матеріалів, пристрій, визначення, реалізації, липкості
Формула / Реферат:
1. Спосіб визначення липкості фотополімеризаційноздатних матеріалів, який включає в себе навантаження зразка, визначення нормальної сили відриву і оцінку липкості поверхні, який відрізняється тим, що величину липкості визначають, за часом прокачування циліндра по поверхні зразка, згідно з співвідношенням:де t - час прокачування циліндра;l - шлях, який...
Спосіб вимірювання електричного струму і пристрій для його реалізації
Номер патенту: 58603
Опубліковано: 15.08.2003
Автори: Іменохоєв Іван Володимирович, Ходак Ілля Якович, Фішман Петро Вікторович
МПК: G01R 19/25
Мітки: пристрій, струму, вимірювання, спосіб, електричного, реалізації
Формула / Реферат:
1. Спосіб вимірювання електричного струму, при якому здійснюють трансформацію вимірюваного струму трансформатором струму, аналогово-цифрове перетворення вторинного струму, математичну обробку миттєвих поточних значень вимірюваного струму і видавання результатів до пристрою вимірювання та релейного захисту, який відрізняється тим, що вимірювання миттєвих значень вторинного струму здійснюють через малі рівні проміжки часу, миттєві поточні...
Спосіб гальмування механічних систем і пристрій для його реалізації
Номер патенту: 74496
Опубліковано: 15.12.2005
Автори: Боровський Євген Павлович, Мацелевич Павло Михайлович, Малянов Микола Іванович
МПК: B60T 1/00
Мітки: пристрій, гальмування, механічних, реалізації, спосіб, систем
Формула / Реферат:
1. Спосіб гальмування механічних систем, який включає використання гідродинамічного опору робочої рідини, який відрізняється тим, що як гальмівний елемент використовують порожнисту еластичну стрічку, яка містить щонайменше дві гідравлічно сполучені між собою камери, робочу рідину подають щонайменше в одну з камер, збільшуючи її об'єм, і створюють рухому перешкоду у вигляді хвилі, що біжить перед рухомим елементом, жорстко зв'язаним з об'єктом...