Спосіб контролю ступеня завантаження конвеєра
Номер патенту: 56950
Опубліковано: 25.01.2011
Автори: Степанов Михайло Тимофійович, Єрьомін Максим Анатолійович, Шестопалов Станіслав Володимирович, Веридусов Петро Олександрович, Кір'язов Іван Миколайович, Аннаев Батир Сейдуллаєвич, Хобін Віктор Андрійович, Тимофєєв Олексій Олександрович, Герасімов Валерій Володимирович

Формула / Реферат
Спосіб контролю ступеня завантаження конвеєра, що включає вимірювання електричного параметра, котрий характеризує споживання привідним електродвигуном конвеєра енергії від джерела живлення і нормування виміряного значення відносно номінального значення цього параметра, який відрізняється тим, що нормоване значення виміряного параметра порівнюють з його розрахунковим значенням, отриманим як значення функції відповідної робочої характеристики електродвигуна при початковому значенні її аргументу, після чого значення аргументу цієї характеристики змінюють до тих пір, поки розрахункове значення параметра не стане рівним виміряному значенню, а значення аргументу, при якому виконується ця рівність, використовують як показник ступеня завантаження конвеєра.
Текст
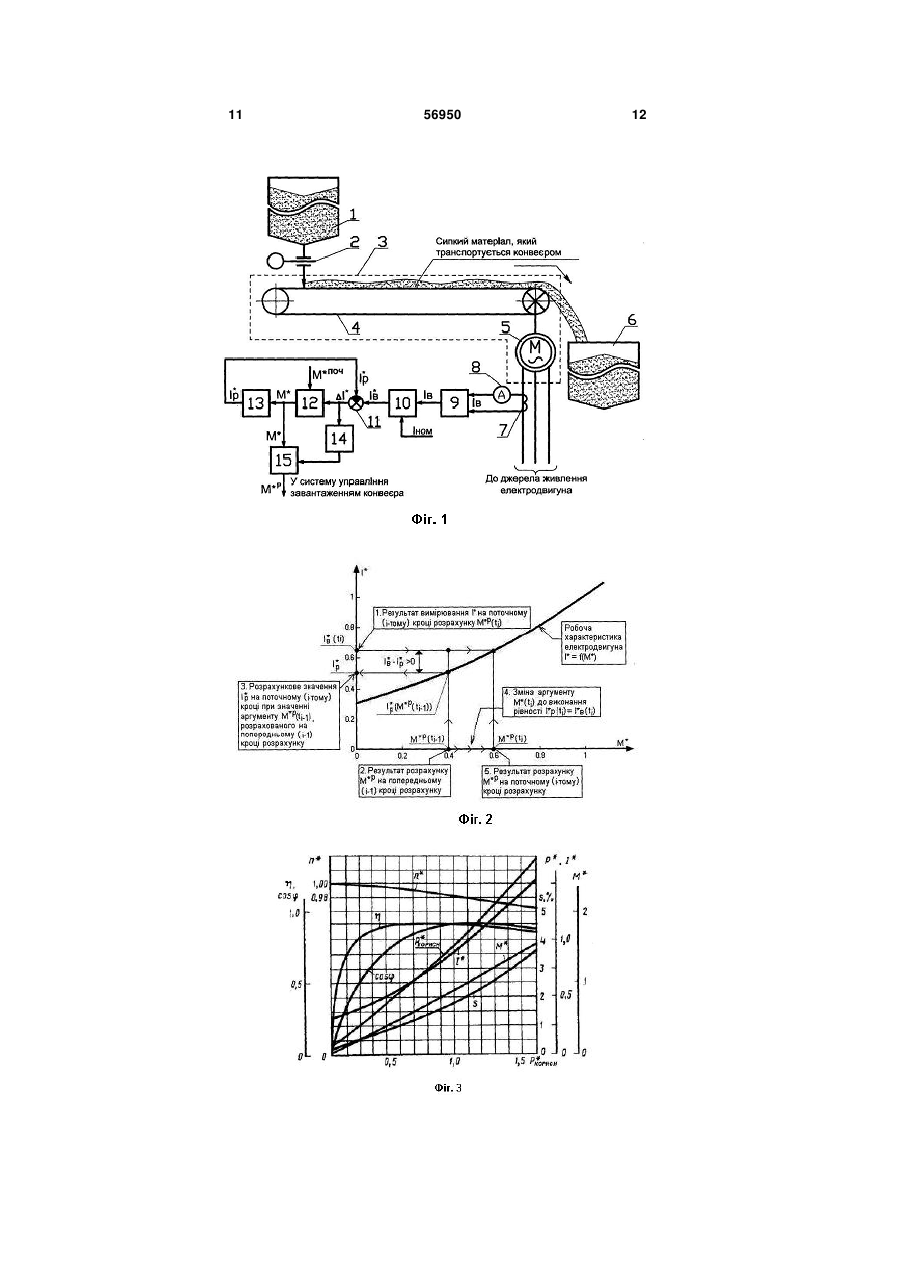
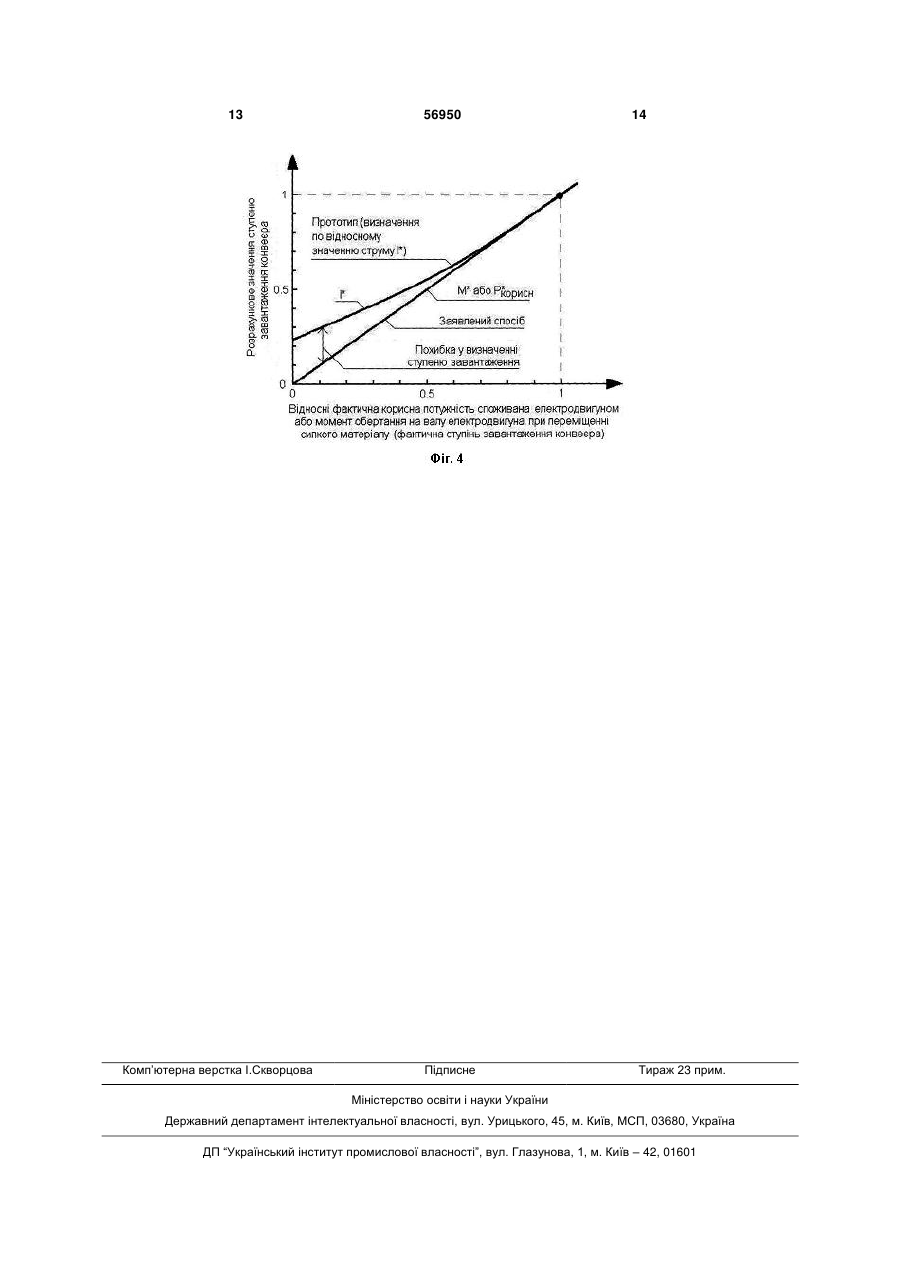
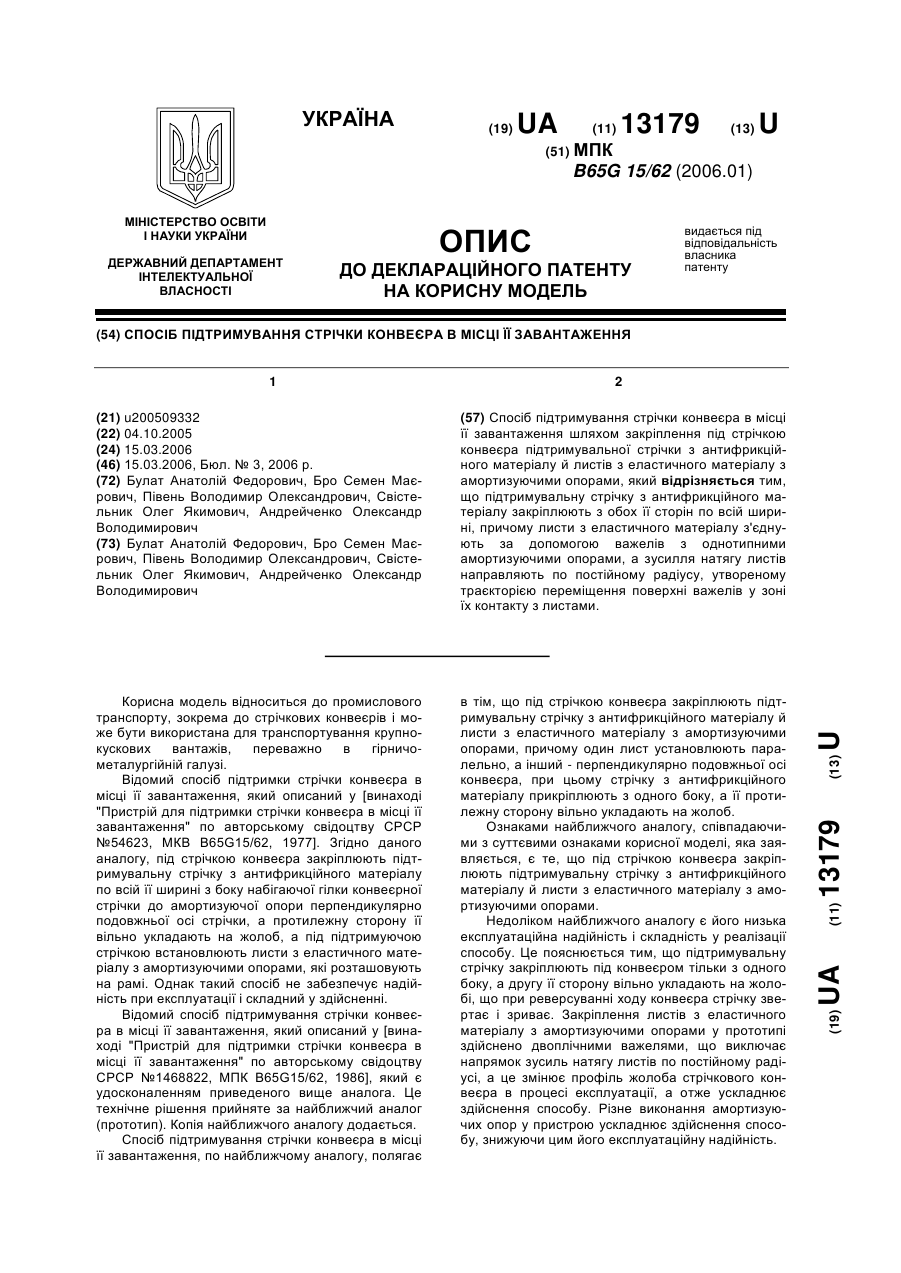
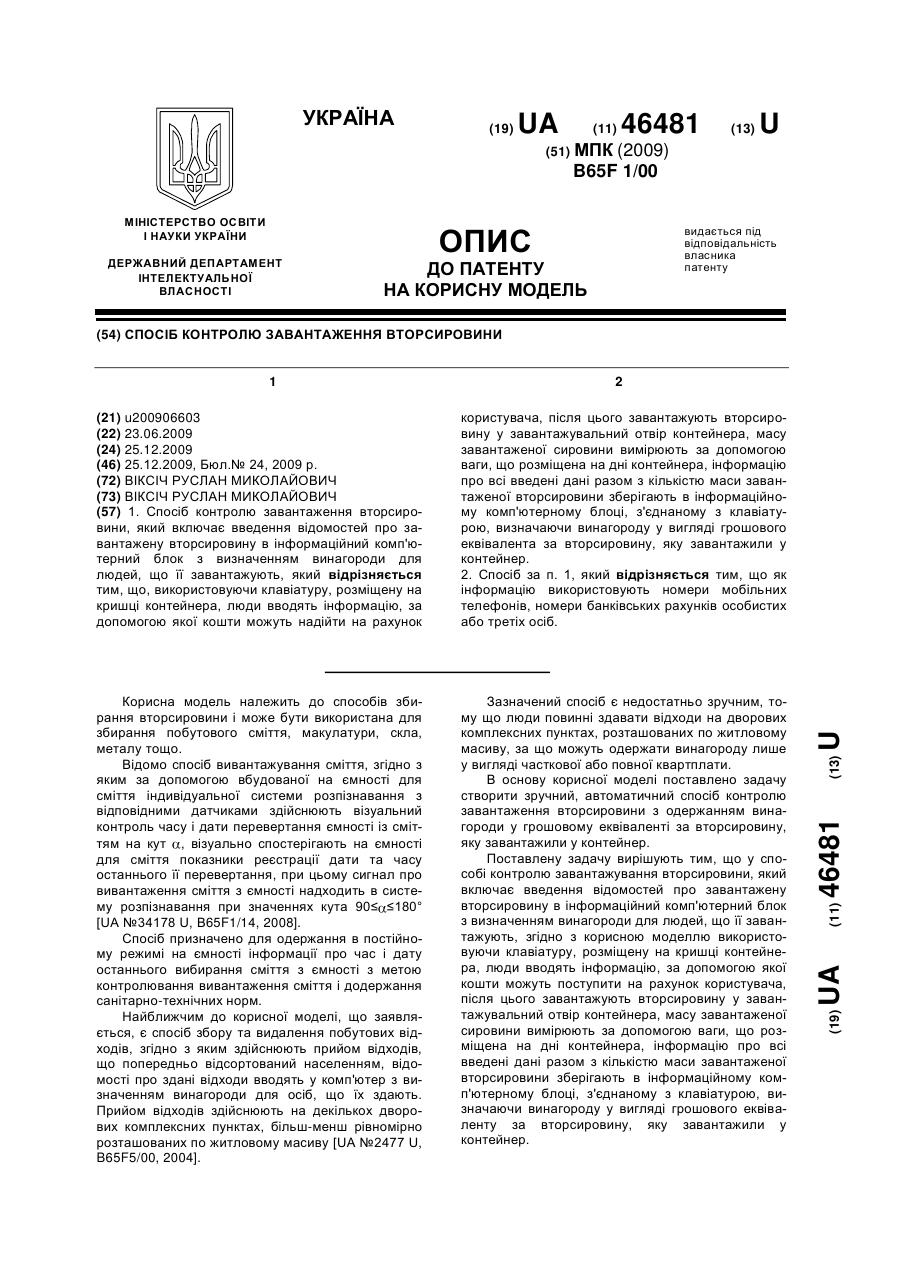
Спосіб контролю ступеня завантаження конвеєра, що включає вимірювання електричного 3 дного електродвигуна момент опору, який, при русі стрічки з постійною швидкістю, з точністю до перехідної складової урівноважується моментом обертання цього двигуна. Вимірювання поточного значення моменту обертання (див. Патент РФ № 2149368, Устройство для бесконтактного измерения крутящего момента вала), і порівняння його зі значенням номінального моменту обертання (опору) дозволяє вести контроль ступеню завантаження конвеєра. Достоїнством способу є можливість досягнення високої точності контролю, а його недоліком висока складність, великі витрати на його реалізацію, а також висока складність експлуатації пристрою, що реалізовує цей спосіб. Відомий також спосіб контролю ступеню завантаження норії (вертикального конвеєра) за величиною вимірюваного в ході транспортування сипкого матеріалу значення струму споживаного приводним електродвигуном норії (див. Птушкин А.Т., Новицкий О.А. Автоматизация производственных процессов в отрасли хранения и переработки зерна. - 2-е изд. Доп. и перераб.-М.: Агропромиздат., 1985.-318с. - с. 132). Про ступінь завантаження норії судять по мірі наближення виміряних значень струму до номінального значення струму приводного електродвигуна норії. Для реалізації способу використовують трансформатор струму і амперметр, що вимірює величину струму. Достоїнства способу - максимально проста і з мінімальними витратами реалізація способу, мінімальне обслуговування пристрою, що реалізовує його, при експлуатації. Недолік способу - низька точність визначення ступеню завантаження. Низька точність обумовлюється тим, що виміряне значення струму, яке характеризує величину електричної енергії, споживаної з мережі приводним електродвигуном конвеєра і, що витрачається на переміщення його робочого органу з сипким матеріалом не враховує втрати енергії в обмотках статора і ротора, а так само її втрати в магнітопроводі статора. У електромеханіці ці втрати відбиваються за допомогою коефіцієнтів потужності (cosφ) і корисної дії (η) (див. Справочник по электрическим машинам: В 2 т. Под общ. ред. И.П. Копылова и Б.К. Клокова. Т. 1. - М.: Энергоатомиздат, 1988. - 456 с, - с.217218). Ці коефіцієнти є істотно нелінійними функціями корисної потужності РКОРИСН. (РКОРИСН. - аргумент цих функцій), що не допускають лінеаризації, а значення цих функцій, при зміні ступеню завантаження конвеєра від холостого ходу до повного завантаження, і відповідної зміни РКОРИСН. змінюються в дуже широких діапазонах, що і є причиною низької точності цього способу. Залежності, що відбивають зміни коефіцієнтів потужності соsφ(РКОРИСН.*) корисної дії η(РКОРИСН.*) приводного електродвигуна при зміні відносної величини його корисної потужності РКОРИСН.*, а також зміни інших його параметрів, а саме: відносної величини струму статора I*(РКОРИСН.*); відносної величини крутячого моменту М*( РКОРИСН.*); відносної величини частоти обертання n*( РКОРИСН.*) і ковзання s(РКОРИСН.*) називають робочими 56950 4 характеристиками (РКОРИСН.* - аргумент усіх цих функцій), представлені на фіг. 3. (див. Справочник по электрическим машинам: В 2 т. Под общ. ред. И.П. Копылова и Б.К. Клокова. Т. 1. - М.: Энергоатомиздат, 1988. - 456 с, - с. 217-218; Электрические машины: Асинхронные машины: Учеб для электромех. спец. Вузов Радин В.И., Брускин Д.Э., Зорохович А.Е.; Под ред. И.П. Копылова - М.: Высш. шк., 1988.-328с. - с. 101). Приклад робочих характеристик, узятий з (див. Электрические машины: Асинхронные машины: Учеб для электромех.cпец. Вузов Радин В.И., Брускин Д.Э., Зорохович А.Е.; Под ред. И.П. Копылова - М.: Высш. шк., 1988.-328с. - с. 101). Відносні значення усіх перерахованих параметрів, отримують нормуванням їх абсолютних значень до номінальних (паспортним) значенням цих параметрів. Позначення відносних параметрів відповідають позначенням абсолютних з додаванням верхнього індексу *. Наприклад, І/І HОМ = І*, где І - поточне значення струму; ІНОМ - номінальне значення струму; І* - відносне значення струму. Різноманітність робочих характеристик електродвигуна не вичерпується тими з них, які наведені в даному прикладі. Зручними для вирішення багатьох задач, у тому числі і для задачі контролю ступеню завантаження можуть виявитися інші робочі характеристики, наприклад залежності активних складових струму або потужності, споживаних електродвигуном від значення РКОРИСН.* Вони можуть бути розраховані з інших робочих характеристик. Наприклад, отримання залежності від РКОРИСН.* відносного значення активної складової струму ІАКТ*, з наявних у розпорядженні робочих характеристик І*(РКОРИСН..*) і cosφ(РКОРИСН.*) можливо застосуванням наступного простого перетворення : ІАКТ*( РКОРИСН.*) = і*( РКОРИСН.*) соsφ(РКОРИСН.*). Таким чином, необхідна робоча характеристика отримана перемножуванням ординат наявних у розпорядженні характеристик. Корисна потужність РКОРИСН. або її відносне значення РКОРИСН.*, характеризує тільки ту частину електричної енергії, споживаної з мережі приводним електродвигуном конвеєра, яка витрачається на переміщення його робочого органу з сипким матеріалом, тобто на корисну роботу. При цьому важливо підкреслити, що значення РКОРИСН. за допомогою електричних вимірювальних приладів виміряне бути не може. її значення може бути обчислене як добуток моменту обертання М на валу приводного електродвигуна конвеєра і кутової швидкості його обертання, тобто РКОРИСН. = Мω. У найбільш поширених на практиці випадках, коли для приводу конвеєрів використовуються електродвигуни змінного струму, зокрема асинхронні, значення кутової швидкості обертання можна рахувати прямо пропорційній частоті напруги живлячої мережі і практично незмінною. В цьому випадку відносні значення М* і РКОРИСН.* тотожні, тобто М* = РКОРИСН.*, тобто їх значення співпадають. Це дозволяє використовувати, як аргумент робочих характеристик, будь-яку з цих відносних змінних. Далі, в прикладах і в описі способу, використову 5 ватимемо як аргумент М*, як простішу фізичну змінну. Вести контроль ступеню завантаження конвеєра можна вимірюючи не лише струм його навантаження, але і будь-які інші параметри, що характеризують споживання електродвигуном енергії від джерела його живлення. Вони, з більшою або меншою точністю, яка істотно залежатиме від міри завантаження конвеєра, характеризуватимуть його момент обертання і корисну потужність на його валу. Як такі параметри, що дають точніші результати можна використовувати активні складові споживаних електродвигуном струму або потужності. Недоліками усіх цих способів є: а) низька точність, оскільки їх виміряні значення не враховують змін коефіцієнта корисної дії η електродвигуна; б) складність виміру, в порівнянні з виміром величини струму. В той же час, якщо будь-який з цих параметрів вже вимірюється, то саме його, з міркувань простоти, доцільно використовувати для визначення ступеню завантаження конвеєра (щоб не вводити додатковий вимір споживаного струму, ускладнюючи тим самим пристрій). Найбільш близьким до способу, що заявляється, є спосіб визначення завантаження норії (вертикального конвеєра) (див. Новицкий О.А. Автоматизация производственных процессов на элеваторах и зерноперерабатывающих предприятиях. Учебник для студентов техникумов системы министерства заготовок. М., «Колос», 1973., - с.173-178). У вказаному способі контроль роботи транспортного устаткування здійснюється за рахунок вимірювання відносної величини струму навантаження споживаного приводним електродвигуном конвеєра, вираженого у відсотках. Реалізація способу припускає вимір струму за рахунок застосування трансформатора струму і амперметра, шкала якого проградуйована у відсотках від максимального (номінального) завантаження. Особливістю цього способу є те, що ступінь завантаження конвеєра визначають за величиною відносного значення струму (тут він виражений у відсотках завантаження), споживаного приводним електродвигуном. Цей спосіб обрано прототипом. Прототип і спосіб, що заявляється, мають дві спільні операції - вимірювання електричного параметра, що характеризує споживання приводним електродвигуном конвеєра енергії від джерела його живлення, і нормування виміряного значення відносно номінального значення цього параметра. Достоїнством цього способу є простота реалізації пристрою контролю і його обслуговування. Недоліком способу, як і інших способів контролю ступеню завантаження конвеєра, що здійснюють вимірювання параметрів, які характеризують споживання приводним електродвигуном конвеєра енергії від джерела його живлення, - низька точність контролю. В основу корисної моделі поставлено задачу створити удосконалений спосіб контролю ступеню завантаження конвеєра, в якому шляхом включення нових операцій забезпечити підвищення точності контролю ступеню завантаження конвеєрів 56950 6 будь-якого типу сипким матеріалом, для умов, коли зміна їх завантаження відбувається в усьому можливому діапазоні – від нульової (холостого ходу конвеєра) до максимально досяжної, при збереженні простоти реалізації цього способу. Поставлена задача вирішена в способі контролю ступеню завантаження конвеєра, що включає вимірювання електричного параметра, котрий характеризує споживання приводним електродвигуном конвеєра енергії від джерела живлення і нормування виміряного значення відносно номінального значення цього параметра, тим, що нормоване значення виміряного параметра порівнюють з його розрахунковим значенням, отриманим як значення функції відповідної робочої характеристики електродвигуна при початковому значенні її аргументу, після чого значення аргументу цієї характеристики змінюють до тих пір, поки розрахункове значення параметра не стане рівним виміряному значенню, а значення аргументу, при якому виконується ця рівність, використовують як показник ступеню завантаження конвеєра. На кожному новому кроці розрахунку, як початкове значення аргументу робочої характеристики, використовують значення ступені завантаження конвеєра, знайденого на попередньому розрахунку. Спосіб, що заявляється, пояснюється кресленням та графіками, де: фіг. 1 - схема пристрою для здійснення одного із варіантів способу; фіг. 2 - графік, який ілюструє здійснення додатково введених перетворень в пропонованому способі; фіг. 3 - графіки робочих характеристик синхронного двигуна; фіг. 4 - графік, що ілюструє результати визначення ступеню завантаження конвеєра за способом, що заявляється і прототипом. Необхідність такого вирішення поставленої задачі пояснюється тим, що контроль ступеню завантаження конвеєрів за результатами вимірювання значень будь-яких параметрів, що характеризують споживання приводним електродвигуном конвеєра енергії від джерела його живлення, здійснюється з великими похибками. Так, наприклад, при малому ступеню завантаження конвеєра величина похибки її визначення за результатами вимірювання перерахованих вище параметрів може складати від десятків до сотень відсотків (відносно фактичного завантаження) і навіть вище. Складність вирішення задачі підвищення точності полягає в тому, що конкретне значення похибки визначення ступеню завантаження саме залежатиме від величини ступеню цього завантаження. Вказані похибки виникають через те, що вимірювані параметри, не враховують втрати енергії в обмотках його статора і ротора, і її втрати в магнітопроводі статора. Ці втрати відбиваються коефіцієнтами корисної дії і потужності, значення яких дуже сильно змінюються при зміні ступеню завантаження. Суть пропонованого способу полягає в тому, що для підвищення точності контролю ступеню завантаження конвеєра вводиться додаткове перетворення вимірюваних значень параметра, який 7 вибраний для контролю ступеню завантаження з множини інших, що характеризують споживання енергії приводним електродвигуном конвеєра від джерела його живлення. Перетворення здійснюється з використанням тієї робочої характеристики приводного електродвигуна, яка відповідає вибраному для контролю параметру. Особливістю перетворення є те, що за вибраною робочою характеристикою вирішується не пряма задача, в якій за значенням аргументу характеристики знаходиться значення функції, а набагато складніша, зворотна задача, в якій при відомому значенні функції шукається таке значення аргументу, яке відповідає відомому значенню функції. Розглянемо приклад, в якому для контролю ступеню завантаження конвеєра вимірюється струм навантаження його приводного електродвигуна. Виміряне і нормоване (відносне) значення струму позначимо через Ів*, де индекс «в» показує джерело набуття цього значення струму (в даному випадку -"вимірювання"). Для здійснення способу необхідно вибрати робочу характеристику, відповідну вимірюваному параметру. Для вибраного прикладу це характеристика Ір*(М*), взаємозв'язок, що описує, між відносним моментом обертання М* на валу двигуна (аргумент) і відносним значенням струму навантаження Ір* (функція). У робочій характеристиці Ір*(М*) відносне значення струму позначене через Ір*, тобто з індексом "р", так як джерелом набуття цього значення струму є вже не вимір, а результат розрахунку за характеристикою. Математичне вираження, додаткове перетворення, що формально описує, і яке складає суть способу, що заявляється, для вибраного прикладу можна записати таким чином: М*Р = arg {ІВ* - Ір*(М*) = 0 }. Зміст виразу полягає в наступному: - при заданій робочій характеристиці електродвигуна І*(М*) і виміряному відносному значенню споживаного ним струму Ів*, необхідно знайти таке значення аргументу М* (відносного моменту на валу електродвигуна) рівного М*р, при якому значення відносного струму навантаження Ір*, розраховане за робочою характеристикою, дорівнювало б відносному значенню струму навантаження ІВ*, отриманому за результатами його вимірювання. Варіант пристрою, який здійснює спосіб контролю, що заявляється, представлений на схемі (див. фіг. 1). До складу схеми входять наступні елементи: витратний бункер сипкого матеріалу 1; засувка 2; конвеєр 3; робочий орган конвеєра (наприклад, стрічка) 4; приводний електродвигун конвеєра 5; приймальний бункер сипкого матеріалу 6; трансформатор струму 7; амперметр для візуального контролю струму навантаження 8; нормуючий перетворювач струму в уніфікований сигнал 9; блок ділення 10; суматор 11; інтегратор 12; блок відтворення робочої характеристики приводного електродвигуна конвеєра (наприклад, блок кусочно-лінійної апроксимації) 13; компаратор 14; блок читання-зберігання (читання-запису) 15. Спосіб здійснюється таким чином. Сипкий матеріал з витратного бункера 1, через засувку 2, подається на конвеєр 3 і розташовується по усій його довжині на рухомому робочому 56950 8 органі (у цьому прикладі - стрічці) до його скидання із стрічки 4, наприклад, в приймальний бункер сипкого матеріалу 6. Рух робочого органу (стрічки) 4 забезпечується приводним електродвигуном 5 через механічну передачу, що зв'язує вали електродвигуна 5 конвеєра 3 і приводного барабана стрічки 4. При цьому приводний електродвигун 5 споживає від джерела свого живлення електричну енергію, яку витрачає на дві складові: корисну роботу і втрати. Для здійснення корисної роботи, тобто переміщення стрічки 4 з сипким матеріалом, електродвигун 5 створює на своєму валу момент обертання М, який передається на приводний барабан стрічки 4, забезпечуючи подолання сил опору її руху. Ця частина споживаної енергії характеризує ступінь завантаження конвеєра 3. Втрати енергії відбуваються в обмотках і магнітопроводі статора, в обмотках ротора електродвигуна 5. Принципово важливо, що величина цих втрат дуже сильно і нелінійно залежить від відносної величини моменту М* на валу електродвигуна 5. Саме ця закономірність сильно знижує точність усіх відомих методів контролю ступеню завантаження конвеєра, заснованих на вимірюванні електричних параметрів, що характеризують величину споживаної електродвигуном 5 енергій, особливо, коли ступінь завантаження змінюється в широких діапазонах. У даному прикладі як параметр, що характеризує величину споживаної електродвигуном 5 енергій, використовується струм навантаження І приводного електродвигуна 5. Вимір струму І, і в корисній моделі, що заявляється, і в прототипі, Здійснюється за допомогою трансформатора струму 7, амперметра 8, який дозволяє візуалізувати виміряне значення ІВ струму І і здійснювати людині-операторові простий (з низькою точністю) спосіб контролю ступеню завантаження конвеєра. Нормуючий перетворювач струму в уніфікований сигнал 9 дозволяє вводити перетворений сигнал в будь-які пристрої, призначені для математичної обробки сигналів, наприклад в контролер і проводити з ІВ необхідні перетворення, у тому числі візуалізувати його і результати його перетворень на цифровому індикаторі або екрані дисплея. У блоці ділення 10 виміряне значення струму ІВ ділиться на номінальне значення струму навантаження електродвигуна ІНОМ (нормуємо) і виходить відносне значення струму навантаження ІВ* = ІВ/ІНОМ- Описана частина пристрою контролю, по суті, реалізує відомий спосіб контролю ступеню завантаження норії, який обрано за прототип. У прототипі операція нормування виміряного значення струму здійснюється за рахунок переградуювання амперметра. Наступні блоки реалізують ту частину способу контролю, що заявляється, яка забезпечує його новизну. Розрахунок значень відносного моменту обертання М* приводного електродвигуна, які з високою точністю характеризують ступінь завантаження конвеєра в усьому можливому діапазоні його завантажень, по виміряному відносному значенню струму навантаження ІВ* електродвигуна і його відомій робочій характеристиці ІР* = І*(М*), є процедурою пошуку значення аргументу М* = М*р по відомому значенню його функції ІР* = Ів*. 9 Для здійснення цієї операції реалізується замкнутий контур з негативним , зворотнім зв'язком, до складу якого входять суматор 11, інтегратор 12, і блок 13 відтворень робочої характеристики приводного електродвигуна 5 конвеєра 3, наприклад у формі кусочно-лінійної апроксимації її графіка. Розглянемо роботу цієї частини схеми для випадку, коли реалізація способу здійснюється на контролері, тобто з квантуванням часу, покроково. На суматорі 11 на початку кроку розрахунку порівнюються відносні значення двох струмів. Перше, виміряне на початку поточного (і -того) кроку розрахунку і таке, що залишається незмінним на протязі усього цього кроку розрахунку – IВ*(ti), аж до його вимірювання на початку наступного кроку розрахунку. Друге, - розраховане Ip*(ti), за робочою характеристикою електродвигуна для початкового значення аргументу M*ПОЧ(ti). Як аргумент M*ПОЧ(tі) береться значення ступеню завантаження конвеєра M*P(tі - 1) знайдене на попередньому (і -1-ом) кроці розрахунку, тобто, М*ПОЧ (tі) = M*P(tі-1). Це значення зберігається в інтеграторі 12 аж до початку розрахунків на наступному кроці (включно), а також зберігається в блоці читання-зберігання 15, до тих пір, поки на і -тому кроці розрахунку не буде розраховано нове значення ступеню завантаження M*P(ti) і записано в блок 15. Якщо ж цей крок перший, то замість значення M*p(tі-1) беруть значення вихідного сигналу інтегратора 12, яке було встановлено на ньому перед початком процесу контролю - початкове значення М*ПОЧ. Значення М*ПОЧ можна узяти будь-яке з області визначення аргументу М* робочої характеристики ІР* = І*(М*), наприклад, будь-яке в діапазоні від нуля до одиниці. Якщо, після першого розрахунку на і -тому кроці, значення IB*(ti) и Ip*(tі) = I*(M*p(tі-1)) не дорівнюють один одному, то сигнал їх різниці ∆І*, отриманий на суматорі 11, і що подається на вхід інтегратора 12 почне їм інтегруватися, змінюючи сигнал на своєму виході. Значення сигналу, що змінюється, на виході інтегратора 12 одночасно є значенням аргументу, що змінюється M*(tі) робочої характеристики ІР* = І*(М*), відтвореною в блоці 13. Зміна сигналу (значення аргументу M*(ti)) на вході блоку 13 призводить до зміни сигналу на його виході (значення функції IP*(tі)). Інтегрування і зміна значення аргументу M*(t;) відбуватимуться до тих пір, поки значення функції Ip*(ti) не стане рівним виміряному значенню IB*(ti), т.е. ІВ*( ti) - IP*(ti) = ∆І* = 0. Досягнення цієї рівності означає, що шукане значення аргументу, рівне ступеню завантаження конвеєра на момент часу ti, тобто для і -того кроку розрахунку, знайдене, і воно рівне M*Р(ti). Одночасно, при виконанні рівності ІВ*(ti) - IP*(ti) = ∆І* = 0, сигнал на вході компаратора 14 дорівнюватиме нулю, і, він, на своєму виході, сформує імпульс керування блоком читання-зберігання 15. У момент імпульсу у блоку 15 розблоковується його вхід і в пам'ять блоку 15 запишеться значення M*p(ti), яке зберігатиметься в ньому до закінчення 56950 10 наступного, і+1-го, кроку розрахунку міри завантаження конвеєра. Теж саме значення M*Р(ti) зберігатиметься і на виході інтегратора 12, яке на наступному, і+1-му, кроці розрахунку буде узято як початкове значення аргументу для першого розрахунку значення його функції, тобто значення IP*(t1+i). Похибка у визначенні ступеню завантаження конвеєра при виконанні умови ІВ* - ІР* = 0 практично залежатиме тільки від точності відтворення робочої характеристики приводного електродвигуна 5 і точність вимірювання величини струму І. При реалізації пропонованого способу на цифровому контролері швидкість інтеграції в інтеграторі 12, має бути такою, щоб за час одного кроку розрахунку ступеню завантаження, перехідний процес в контурі зворотного зв'язку устигав закінчитися при будь-кому, з рекомендованих, початкових значеннях М*ПОЧ. Оскільки зміна ступеню завантаження є безперервною і відносно функцією часу, що повільно змінюється, а крок розрахунку за часом маленьким, то різниця між М*ПОЧ(ti) и M*Р(tі) буде, як правило, невеликий і перехідні процеси в контурі зворотного зв'язку закінчуватимуться швидко. При реалізації пропонованого способу на аналогових засобах швидкість інтеграції в інтеграторі 12 доцільно брати максимально великою. У обох випадках величина швидкості інтеграції повинна обмежуватися виходячи з вимог запасу стійкості контура або максимально допустимої міри його коливальної. Графічна ілюстрація реалізації процедури обчислення відносного моменту обертання M*P(tі, ∆I* = 0) за робочою характеристикою приводного ' електродвигуна ІР* = І*(М*) і виміряному відносному значенню споживаного ним струму ІВ*(ti) наведена на фіг. 2. Порівняння результатів визначення ступеню завантаження конвеєра за способом, який розглядається як прототип, і за способом, що заявляється, наведений на фіг. 4. При порівнянні передбачалося, що робочі характеристики приводного електродвигуна, використовувані при обчисленнях, повністю відповідають реальним характеристикам приводного електродвигуна. При їх невідповідності величина похибки визначення ступеню завантаження конвеєра відповідатиме похибкам відтворення робочих характеристик. А вони будуть значно менше, ніж ті, які дають відомі способи контролю завантаження конвеєрів. Підвищення точності контролю ступеню завантаження конвеєрів сипким матеріалом при управлінні процесом транспортування дозволить людині-операторові або системі автоматичного керування вести процес цього транспортування з вищою продуктивністю, одночасно запобігаючи перевантаженню конвеєрів сипким матеріалом. Це понизить загальний час транспортування, енерговитрати на транспортування і вірогідність аварійних зупинок потоково-транспортної лінії. 11 56950 12 13 Комп’ютерна верстка І.Скворцова 56950 Підписне 14 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of degree of conveyer loading
Автори англійськоюAnnaev Batyr Seidullaievych, Herasimov Valerii Volodymyrovych, Khobin Viktor Andriiovych, Kiriazov Ivan Mykolaiovych, Shestopalov Stanislav Volodymyrovych, Yeriomin Maksym Anatoliiovych, Verydusov Petro Oleksandrovych, Tymofieiev Oleksii Oleksandrovych, Stepanov Mykhailo Tymofiiovych
Назва патенту російськоюСпособ контроля степени загрузки конвейера
Автори російськоюАннаев Батыр Сейдуллаевич, Герасимов Валерий Владимирович, Хобин Виктор Андреевич, Кирьязов Иван Николаевич, Шестопалов Станислав Владимирович, Еремин Максим Анатольевич, Веридусов Петр Александрович, Тимофеев Алексей Александрович, Степанов Михаил Тимофеевич
МПК / Мітки
МПК: G01R 29/00, B65G 17/00
Мітки: конвеєра, спосіб, завантаження, контролю, ступеня
Код посилання
<a href="https://ua.patents.su/7-56950-sposib-kontrolyu-stupenya-zavantazhennya-konveehra.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю ступеня завантаження конвеєра</a>
Спосіб підтримування стрічки конвеєра в місці її завантаження
Номер патенту: 13179
Опубліковано: 15.03.2006
Автори: Булат Анатолій Федорович, Свістельник Олег Якимович, Бро Семен Маєрович, Півень Володимир Олександрович, Андрейченко Олександр Володимирович
МПК: B65G 15/60
Мітки: конвеєра, завантаження, місці, спосіб, підтримування, стрічки
Формула / Реферат:
Спосіб підтримування стрічки конвеєра в місці її завантаження шляхом закріплення під стрічкою конвеєра підтримувальної стрічки з антифрикційного матеріалу й листів з еластичного матеріалу з амортизуючими опорами, який відрізняється тим, що підтримувальну стрічку з антифрикційного матеріалу закріплюють з обох її сторін по всій ширині, причому листи з еластичного матеріалу з'єднують за допомогою важелів з однотипними амортизуючими опорами, а...
Пристрій для підтримки стрічки конвеєра в місці її завантаження

Номер патенту: 13178
Опубліковано: 15.03.2006
Автори: Свістельник Олег Якимович, Андрейченко Олександр Володимирович, Бро Семен Маєрович, Булат Анатолій Федорович, Півень Володимир Олександрович
МПК: B65G 15/60
Мітки: місці, пристрій, підтримки, завантаження, конвеєра, стрічки
Формула / Реферат:
Пристрій для підтримки стрічки конвеєра в місці її завантаження, який містить раму, підтримуючу стрічку з антифрикційного матеріалу, листи з еластичного матеріалу з амортизуючими опорами, закріпленими на рамі у одного листа паралельно, а у іншого - перпендикулярно подовжньої осі конвеєра, який відрізняється тим, що підтримуюча стрічка з антифрикційного матеріалу закріплена з обох її сторін по всій ширині, а обидва листи з еластичного...
Спосіб контролю завантаження вторсировини
Номер патенту: 46481
Опубліковано: 25.12.2009
Автор: Віксіч Руслан Миколайович
МПК: B65F 1/00
Мітки: вторсировини, спосіб, контролю, завантаження
Формула / Реферат:
1. Спосіб контролю завантаження вторсировини, який включає введення відомостей про завантажену вторсировину в інформаційний комп'ютерний блок з визначенням винагороди для людей, що її завантажують, який відрізняється тим, що, використовуючи клавіатуру, розміщену на кришці контейнера, люди вводять інформацію, за допомогою якої кошти можуть надійти на рахунок користувача, після цього завантажують вторсировину у завантажувальний отвір...
Спосіб контролю ступеня забрудненості поверхні ізоляторів під напругою
Номер патенту: 17315
Опубліковано: 15.09.2006
Автори: Сіріков Олександр Іванович, Серебренніков Сергій Валентинович
МПК: H02H 7/26
Мітки: поверхні, напругою, забрудненості, ізоляторів, контролю, ступеня, спосіб
Формула / Реферат:
1. Спосіб контролю ступеня забрудненості поверхні ізоляторів під напругою, який полягає у вимірюванні струму витоку ізолятора і контролю за його значенням стану забруднення поверхні, який відрізняється тим, що для відстроювання від неінформативного об'ємного струму витоку використовують охоронне кільце.2. Спосіб за п. 1, який відрізняється тим, що для відстроювання від хибних спрацьовувань внаслідок збільшення активної і ємнісної...
Кінцева розвантажувальна рама стрічкового конвеєра для завантаження прес-форм керамічним матеріалом
Номер патенту: 75139
Опубліковано: 15.03.2006
Автор: Джованарді Умберто
МПК: B65G 15/00, B65G 15/08, B65G 39/10, B65G 15/32, B28B 13/00
Мітки: кінцева, завантаження, конвеєра, рама, матеріалом, розвантажувальна, стрічкового, керамічним, прес-форм
Формула / Реферат:
1. Кінцева розвантажувальна рама стрічкового конвеєра для завантаження прес-форм керамічними матеріалами, яка має засіб, навколо якого принаймні частково огинається стрічка під час її руху і, який має декілька роликів (3) малого діаметра, розташованих послідовно один за одним, кожний з яких підтримується на своїх кінцях опорними елементами (4), причому ролики (3) малого діаметра розташовані послідовно один за одним так, що їх осі утворюють...
Попередній патент: Вінірна шина-протез леоненка
Наступний патент: Компактна двотрансформаторна підстанція
Випадковий патент: Механізм переміщення секцій кріплення та конвеєра