Спосіб керування електроприводом штангової глибинної помпи та пристрій для його реалізації
Номер патенту: 60393
Опубліковано: 15.10.2003
Автори: Бульбас Валерій Миколайович, Калужний Богдан Семенович, Білик Володимир Федотович, Денис Богдан Дмитрович, Мартинчук Анастасія Данилівна
Формула / Реферат
1. Спосіб керування електроприводом штангової глибинної помпи, що базується на визначенні коефіцієнта заповнення циліндра глибинної помпи за різницею площ фігур, окреслених динамограмою верстата-гойдалки, який відрізняється тим, що відповідно до значення коефіцієнта заповнення циліндра глибинної помпи змінюється швидкість обертання двигуна верстата-гойдалки, а мірою коефіцієнта заповнення є різниця площ фігур, сформованих з розгорнутої динамограми - залежності зусилля в полірованому штоці від часу, для чого фіксують крайнє нижнє положення полірованого штока і значення зусилля в цьому положенні, реєструють зміну зусилля в полірованому штоці при ході його вгору, визначають площу фігури, окресленої реєстрограмою зусилля і лінією зусилля в крайньому нижньому положенні до моменту крайнього верхнього положення, фіксують це положення і значення зусилля в ньому, реєструють зміну зусилля в полірованому штоці при ході його вниз, визначають площу фігури, окресленої реєстрограмою зусилля і лінією зусилля в крайньому верхньому положенні до моменту крайнього нижнього положення, визначають різницю знайдених площ, за якою судять про величину коефіцієнта заповнення глибинної помпи і, в залежності від його значення, яке зберігається протягом певного часу, змінюють швидкість обертання двигуна верстата-гойдалки.
2. Пристрій для керування електроприводом штангової глибинної помпи, що містить давач зусилля в полірованому штоці, давачі верхнього і нижнього крайніх положень кривошипа, реверсивний лічильник (площі динамограми), лічильник (числа циклів незаповненої глибинної помпи), тригер (першої і другої половини циклів помпування), числовий компаратор, три схеми співпадіння, дві схеми АБО, який відрізняється тим, що додатково містить аналоговий комутатор з пам'яттю, перший і другий формувачі імпульсів, перший і другий суматори, перший і другий перетворювачі напруги в частоту, елемент часової затримки, інвертор, першу і другу цифрові пам'яті, четверту схему співпадіння, дешифратор, цифровий задавач і регульований привід верстата-гойдалки, причому вихід давача зусилля з'єднаний з першими входами першого і другого суматорів і входом аналогового комутатора з пам'яттю, вихід якого з'єднаний з другими входами цих суматорів, вихід першого суматора підключений до входу першого перетворювача напруги в частоту, вихід якого з'єднаний з першим входом першої схеми співпадіння, вихід другого суматора підключений до входу другого перетворювача напруги в частоту, вихід якого з'єднаний з першим входом другої схеми співпадіння, вихід першої схеми співпадіння з'єднаний з входом додавання реверсивного лічильника, а вихід другої схеми співпадіння з'єднаний з входом віднімання цього ж лічильника, давач крайнього верхнього положення кривошипа з'єднаний з входом першого формувача імпульсів, вихід якого підключений до першого входу першої схеми АБО, до першого входу тригера, до входу елемента часової затримки і до входу "Запис" першої цифрової пам'яті, давач крайнього нижнього положення кривошипа з'єднаний з входом другого формувача імпульсів, вихід якого підключений до других входів тригера і першої схеми АБО, вихід якої з'єднаний з входом "Запис" аналогового комутатора з пам'яттю, перший вихід тригера з'єднаний з другим входом першої схеми співпадіння, а другий його вихід з'єднаний з другим входом другої схеми співпадіння, вихід реверсивного лічильника з'єднаний з входом першої цифрової пам'яті, а її вихід підключений до першого входу числового компаратора і до входу другої цифрової пам'яті, другий вхід числового компаратора з'єднаний з виходом цифрового задавача, а вихід другої цифрової пам'яті підключений до входу "Задання швидкості" регульованого привода верстата-гойдалки, вихід елемента часової затримки з'єднаний з першими входами третьої і четвертої схем співпадіння і входом "Встановлення нуля" реверсивного лічильника, вихід числового компаратора з'єднаний з другим входом третьої схеми співпадіння і входом інвертора, вихід якого з'єднаний з другим входом четвертої схеми співпадіння, вихід третьої схеми співпадіння підключений до входу лічильника, вихід якого через дешифратор з'єднаний з входом "Запис" другої цифрової пам'яті і першим входом другої схеми АБО, вихід четвертої схеми співпадіння з'єднаний з другим входом другої схеми АБО, вихід якої з'єднаний з входом "Встановлення нуля" лічильника.
Текст
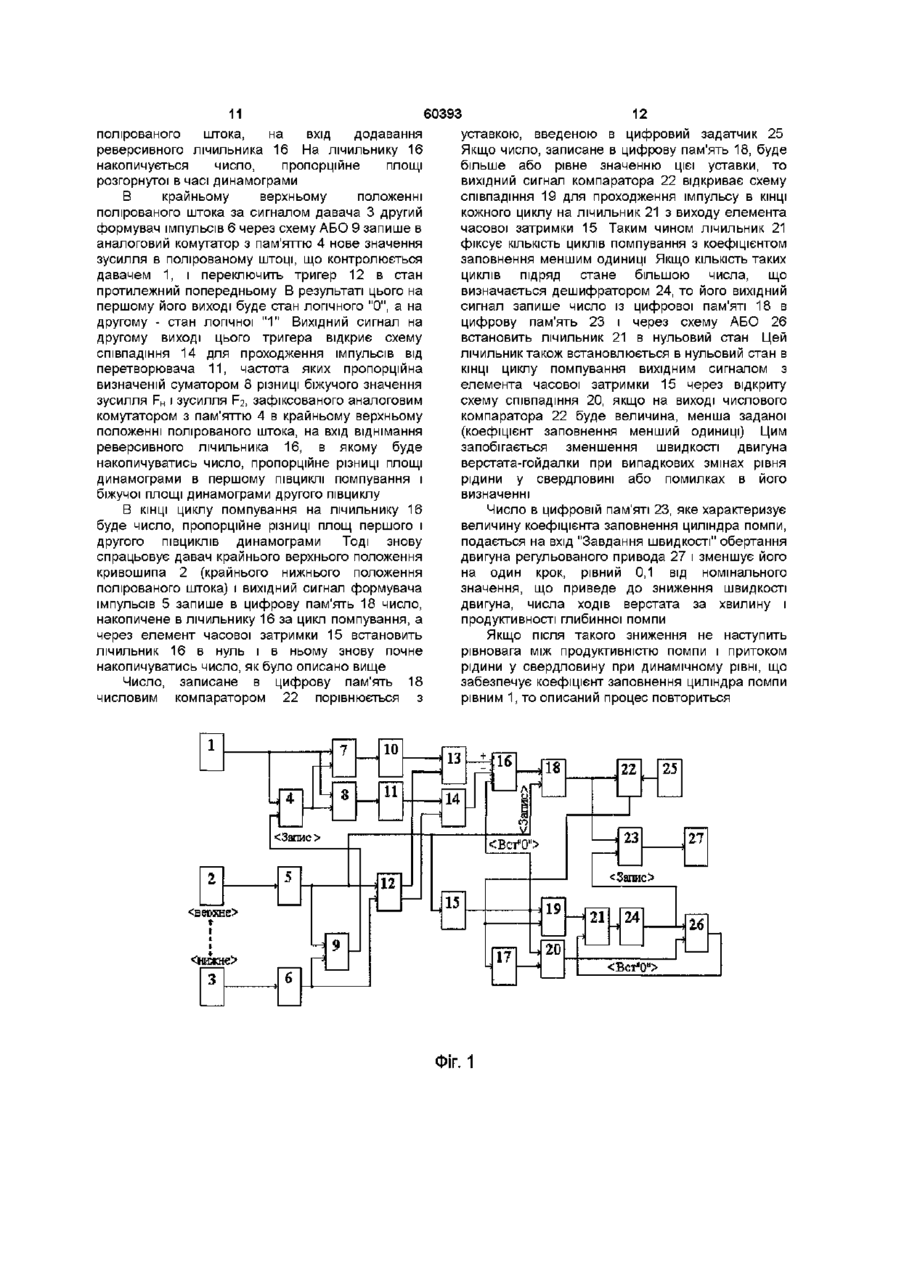
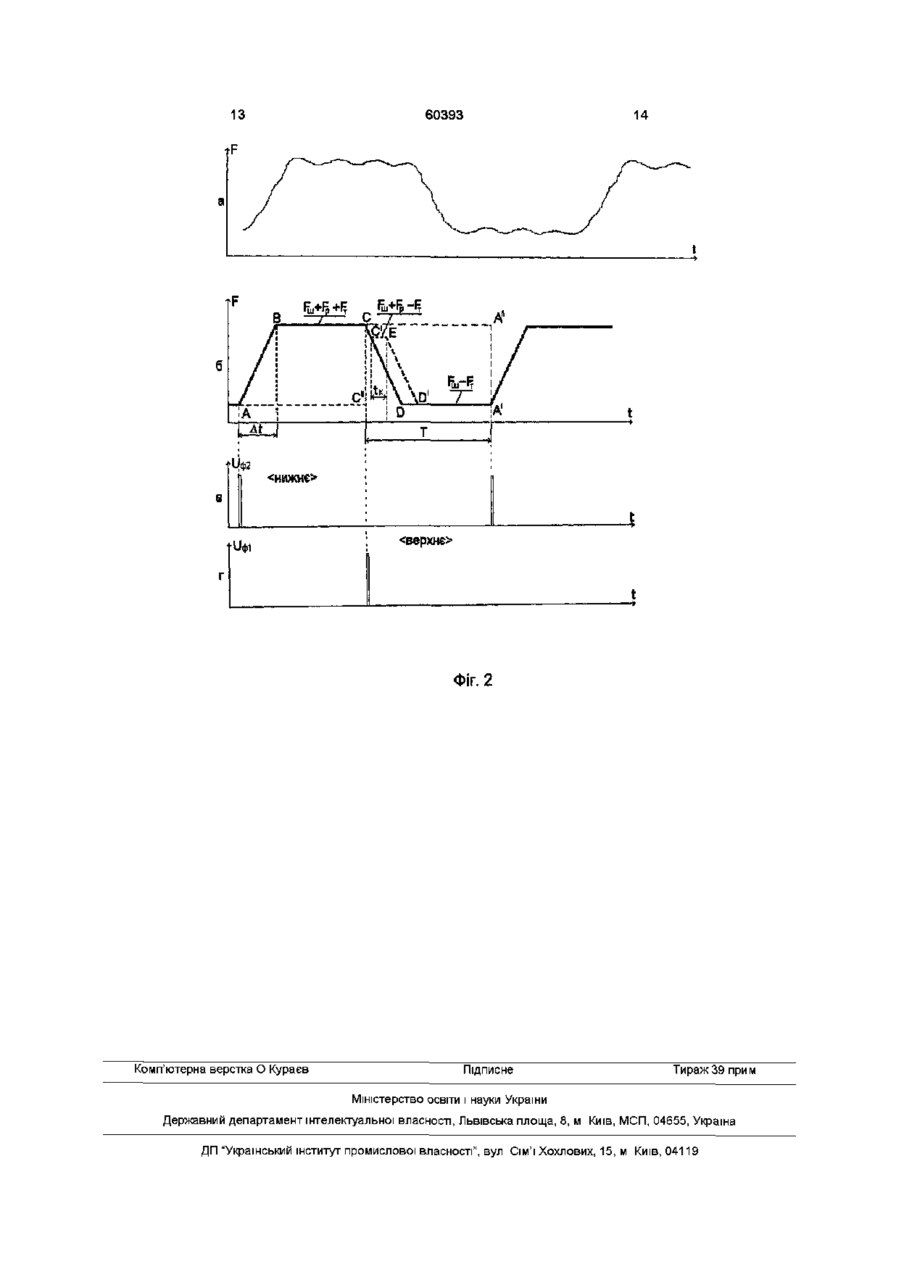
1 Спосіб керування електроприводом штангової глибинної помпи, що базується на визначенні коефіцієнта заповнення циліндра глибинної помпи за різницею площ фігур, окреслених динамограмою верстата-гоидалки, який відрізняється тим, що ВІДПОВІДНО до значення коефіцієнта заповнення циліндра глибинної помпи змінюється швидкість обертання двигуна верстата-гоидалки, а мірою коефіцієнта заповнення є різниця площ фігур, сформованих з розгорнутої динамограми - залежності зусилля в полірованому штоці від часу, для чого фіксують крайнє нижнє положення полірованого штока і значення зусилля в цьому положенні, реєструють зміну зусилля в полірованому штоці при ході його вгору, визначають площу фігури, окресленої реєстрограмою зусилля і ЛІНІЄЮ зусилля в крайньому нижньому положенні до моменту крайнього верхнього положення, фіксують це положення і значення зусилля в ньому, реєструють зміну зусилля в полірованому штоці при ході його вниз, визначають площу фігури, окресленої реєстрограмою зусилля і ЛІНІЄЮ зусилля в крайньому верхньому положенні до моменту крайнього нижнього положення, визначають різницю знайдених площ, за якою судять про величину коефіцієнта заповнення глибинної помпи і, в залежності від його значення, яке зберігається протягом певного часу, змінюють швидкість обертання двигуна верстата-гоидалки 2 Пристрій для керування електроприводом штангової глибинної помпи, що містить давач зусилля в полірованому штоці, давачі верхнього і нижнього крайніх положень кривошипа, реверсивний лічильник (площі динамограми), лічильник (числа циклів незаповненої глибинної помпи), тригер (першої і другої половини циклів помпування), числовий компаратор, три схеми співпадшня, дві схеми АБО, який відрізняється тим, що додатково містить аналоговий комутатор з пам'яттю, перший і другий формувачі імпульсів, перший і другий суматори, перший і другий перетворювачі напруги в частоту, елемент часової затримки, інвертор, першу і другу цифрові пам'яті, четверту схему співпадшня, дешифратор, цифровий задавач і регульований привід верстата-гоидалки, причому вихід давача зусилля з'єднаний з першими входами першого і другого суматорів і входом аналогового комутатора з пам'яттю, вихід якого з'єднаний з другими входами цих суматорів, вихід першого суматора підключений до входу першого перетворювача напруги в частоту, вихід якого з'єднаний з першим входом першої схеми співпадшня, вихід другого суматора підключений до входу другого перетворювача напруги в частоту, вихід якого з'єднаний з першим входом другої схеми співпадшня, вихід першої схеми співпадшня з'єднаний з входом додавання реверсивного лічильника, а вихід другої схеми співпадшня з'єднаний з входом віднімання цього ж лічильника, давач крайнього верхнього положення кривошипа з'єднаний з входом першого формувача імпульсів, вихід якого підключений до першого входу першої схеми АБО, до першого входу тригера, до входу елемента часової затримки і до входу "Запис" першої цифрової пам'яті, давач крайнього нижнього положення кривошипа з'єднаний з входом другого формувача імпульсів, вихід якого О со о> со о (О 60393 підключений до других входів тригера і першої входами третьої і четвертої схем співпадіння і схеми АБО, вихід якої з'єднаний з входом "Запис" входом "Встановлення нуля" реверсивного аналогового комутатора з пам'яттю, перший вихід лічильника, вихід числового компаратора тригера з'єднаний з другим входом першої схеми з'єднаний з другим входом третьої схеми співпадшня, а другий його вихід з'єднаний з другим співпадшня і входом інвертора, вихід якого входом другої схеми співпадшня, вихід з'єднаний з другим входом четвертої схеми реверсивного лічильника з'єднаний з входом співпадшня, вихід третьої схеми співпадшня першої цифрової пам'яті, а її вихід підключений до підключений до входу лічильника, вихід якого першого входу числового компаратора і до входу через дешифратор з'єднаний з входом "Запис" другої цифрової пам'яті, другий вхід числового другої цифрової пам'яті і першим входом другої компаратора з'єднаний з виходом цифрового схеми АБО, вихід четвертої схеми співпадшня задавача, а вихід другої цифрової пам'яті з'єднаний з другим входом другої схеми АБО, підключений до входу "Задания швидкості" вихід якої з'єднаний з входом "Встановлення нуля" регульованого привода верстата-гойдалки, вихід лічильника елемента часової затримки з'єднаний з першими Взаємопов'язана група винаходів відноситься до засобів контролю і керування об'єктами видобутку нафти, зокрема глибинними насосними установками, і може бути застосована у нафтовидобувній галузі Відомий спосіб керування роботою верстатагойдалки за наявністю потоку рідини на виході із свердловини при ході поршня помпи вгору, що визначається за співставленням положень зворотного клапана на викидній лінії і коромисла верстата-гойдалки, який зводиться до періодичних зупинок і пусків електропривода верстата (Р Я Якубович Контроль й автоматизация добычи нефти - М Гостехиздат, 1959 -с 318) Недоліком цього способу керування приводом глибинної штангової помпи є підвищені втрати електроенергії, зумовлені частими пусками електродвигуна, і зниження притоку нафти із пласта, зумовлене підвищенням динамічного рівня рідини у свердловині під час зупинки привода, а також прискорене зношення глибинної помпи, спричинене осаджуванням піску Спосіб вимагає також спеціальної конструкції зворотного клапана, який міг би сигналізувати про своє положення Такий клапан відомий - в ньому в залежності від положення змінюється індуктивність електричної шпулі Клапан, внаслідок своєї складності, створює цілий ряд незручностей в експлуатації ВІДОМІ також способи керування процесом періодичої експлуатації малодебітних свердловин, основані на аналізі співвідношень часу помпування нафти із свердловини і часу накопичення нафти в ній (АС №1481382 СССР Способ регулирования процесса периодической эксплуатации малодебитных нефтяных скважин / Ю А Махмудов й др // Открытия Изобретения 1989 - №19) або аналізі дебіту свердловини і характеру зміни його в часі (А С №1448083 СССР Способ управления глубинно-насосной установкой нефтяных скважин / В А Новицкий // Открытия Изобретения -1988 -№48) Недоліком обох цих способів є те, що реалізація їх вимагає тривалих досліджень свердловини і практично не піддається автоматизації Найближчим до способу, що заявляється, вибраним як прототип, є спосіб зміни тривалості роботи електропривода глибинної помпи при незмінній величині паузи в періоді циклу роботи верстата-гойдалки, причому рішення про кінець роботи двигуна (його зупинку) приймається на основі аналізу розгорнутої динамограми, а саме визначенні різниці площ, окреслених динамограмою при ході полірованого штока вгору і вниз Тривалість накопичення рідини у свердловині залишається незмінною (А С №1229426 СССР Устройство для автоматического управления глубиннонасосной установкой малодебитных нефтяных скважин / Т М Алиев и др //Открытия Изобретения -1986 -№17) Недоліком цього способу є те, що різниця площ, за якою судять про коефіцієнт заповнення помпи і приймають рішення про зупинку верстата, істотно залежить від сил сухого і в'язкого тертя штанг об ліфтові труби і рідину, які цей спосіб не враховує, а визначена при налагодженні пристрою величина уставки може з часом змінюватись Це може призвести до значної похибки у визначенні коефіцієнта заповнення і хибних зупинок помпи Зупинка помпи, а значить и періодична експлуатація, призводять також до зниження продуктивності свердловини, осідання піску і швидкого стирання деталей помпи Відомий пристрій для визначення заповнення глибинної штангової помпи, що базується на аналізі сигналів давачів зусилля і ходу верстатагойдалки (АС №1507957 СССР Устройство для определения заполнения скважинного штангового насоса / Ю А Махмудов и др // Открытия Изобретения -1989 -№34) В залежності від результату цього аналізу приймається рішення про незаповнення помпи і подається команда на зупинку верстата Недоліком пристрою є те, що він вимагає встановлення на верстаті давача ходу, а алгоритм фіксації факту незаповнення передбачає визначення максимуму сигналу давача зусилля Це зумовлює складність пристрою і низьку достовірність прийнятого рішення Найближчим до пристрою, що заявляється, вибраним як прототип, є пристрій для автоматичного керування глибинною штанговою помпою малодебітних нафтових свердловин, що містить частотний давач зусилля, фіксатор крайніх положень верстата-гойдалки, реверсивний лічильник, блок керування, схеми порівняння, вихідний тригер, виконавче реле і блок індикації (АС №1229426 СССР Устройство для автоматического управления глубиннонасосной установкой малодебитных нефтяных скважин / Т М Алиев и др //Открытия Изобретения -1986 -№17) Істотним недоліком даного пристрою є те, що він враховує тільки один фактор, що зумовлює нестабільність форми розгорнутої динамограми, а саме - зміну положення нульової лінії вихідного сигналу давача зусилля Такі фактори, як сила тертя штанг об ліфтові труби іхарактер коливань зусилля, зумовлених пружністю штанг і ліфтових труб, можливі пропускання рідини через клапани глибинної помпи та щілину між поршнем і циліндром, які впливають на величину уставки вихідного коду реверсивного лічильника, що служить базою для формування сигналу на зупинку привода верстата-гойдалки і визначається заздалегідь при налагодженні пристрою, в ньому не враховуються Це може зумовити зупинку двигуна верстата (закінчення періоду помпування) при значеннях коефіцієнта заповнення глибинної помпи, що істотно відрізняються від бажаних, на які був налагоджений пристрій, або необхідність частого переналагодження пристрою Наслідком неправильного визначення моменту зупинки (закінчення періоду помпування) буде або недобір нафти із свердловини, або прискорене зношування рухомих деталей глибинної помпи В основу першого з групи винаходів поставлено задачу створення способу керування електроприводом штангової глибинної помпи, який враховує нестабільність динамограми верстатагойдалки, знятої з давача зусилля, встановленого на поверхні, і тим самим гарантує достовірність визначення інтенсивності притоку рідини із продуктивного пласта у свердловину і змінює швидкість двигуна, погоджуючи продуктивність помпи із визначеною інтенсивністю притоку Це дозволяє забезпечити вищу точність керування роботою глибинної штангової помпи, збільшити продуктивність свердловини і зменшити зношення и механічного обладнання В основу другого з групи винаходів поставлено задачу створення пристрою для керування електроприводом штангової глибинної помпи, який дозволяє врахувати фактори, що зумовлюють нестабільність динамограми верстата-гойдалки, знятої з давача зусилля, встановленого на поверхні, шляхом введення додаткових елементів у пристрій і зміни алгоритму його роботи, що, завдяки сигналам нижнього і верхнього положень полірованого штока і фіксації зусиль в цих положеннях, забезпечує достовірність визначення інтенсивності притоку рідини із продуктивного пласта у свердловину і дозволяє забезпечити вищу точність керування роботою глибинної штангової помпи, збільшити продуктивність свердловини і зменшити зношення її механічного 60393 обладнання Перша поставлена задача вирішується тим, що в способі керування електроприводом штангової глибинної помпи, що базується на визначенні коефіцієнта заповнення циліндра глибинної помпи за різницею площ, згідно з винаходом, ВІДПОВІДНО до значення коефіцієнта заповнення змінюється швидкість обертання двигуна верстата-гойдалки, а мірою коефіцієнта заповнення є різниця площ фігур, сформованих з розгорнутої динамограми - залежності зусилля в полірованому штоці від часу, для чого фіксують крайнє нижнє положення полірованого штока і значення зусилля в цьому положенні, реєструють зміну зусилля в полірованому штоці при ході його вгору, визначають площу фігури, окресленої реєстрограмою зусилля і ЛІНІЄЮ зусилля в крайньому нижньому положенні до моменту крайнього верхнього положення, фіксують це положення і значення зусилля в ньому, реєструють зміну зусилля в полірованому штоці при ході його вниз, визначають площу фігури, окресленої реєстрограмою зусилля і ЛІНІЄЮ зусилля в крайньому верхньому положенні до моменту крайнього нижнього положення, визначають різницю знайдених площ, за якою судять про величину коефіцієнта заповнення глибинної помпи і, в залежності від його значення, яке зберігається протягом певного часу, змінюють швидкість обертання двигуна верстата-гойдалки Використання різниці площ фігур, сформованих з розгорнутої динамограми способом, що заявляється, дозволяє встановити факт зниження динамічного рівня у свердловині під верхній кінець циліндра глибинної помпи без необхідності його безпосереднього вимірювання Якщо динамічний рівень рідини у свердловині забезпечує цілковите заповнення циліндра помпи, то різниця цих площ дорівнює нулю незалежно від величини сил тертя, що виникають в русі штанги Разом з пониженням цього рівня різниця монотонно зростає Такий спосіб посереднього контролю динамічного рівня забезпечує більшу точність і достовірність прийняття рішення про ДОЦІЛЬНІСТЬ зміни швидкості двигуна верстатагойдалки Регулювання швидкості обертання двигуна або числа ходів плунжера за хвилину в залежності від фактичного рівня рідини у свердловині запобігає осіданню піску, зменшує інтенсивність зношування глибинної помпи, питому витрату електроенергії на підняття рідини із свердловини і, як наслідок, підвищує економічність роботи глибинонасосної установки Друга поставлена задача вирішується тим, що пристрій для керування електроприводом штангової глибинної помпи, що містить давач зусилля в полірованому штоці, давачі верхнього і нижнього крайніх положень кривошипа, реверсивний лічильник (площі динамограми), лічильник (числа циклів незаповненої глибинної помпи), тригер (першої і другої половини циклів помпування), числовий компаратор, три схеми співпадшня, дві схеми АБО, згідно з винаходом, додатково містить аналоговий комутатор з пам'яттю, перший і другий формувачі імпульсів, 60393 8 перший і другий суматори, перший і другий зусилля в полірованому штоці установки, в якій не перетворювачі напруги в частоту, елемент часової враховані динамічні зусилля, зумовлені затримки, інвертор, першу і другу цифрові пам'яті, коливаннями штанг і ліфтових труб з четверту схему співпадшня, дешифратор, розподіленими пружністю і масою, цифровий задатчик і регульований привід - на фіг 2в,г - часові залежності сигналів у верстата-гойдалки, причому вихід давача зусилля нижньому і верхньому положеннях полірованого з'єднаний з першими входами першого і другого штока На фіг 1 суматорів і входом аналогового комутатора з 1 - давач зусилля в полірованому штоці, пам'яттю, вихід якого з'єднаний з другими входами 2 - давач крайнього верхнього положення цих суматорів, вихід першого суматора кривошипа, підключений до входу першого перетворювача 3 - давач крайнього нижнього положення напруги в частоту, вихід якого з'єднаний з першим кривошипа, входом першої схеми співпадшня, вихід другого 4 - аналоговий комутатор з пам'яттю, суматора підключений до входу другого 5 - перший формувач імпульсів, перетворювача напруги в частоту, вихід якого 6 - другий формувач імпульсів, з'єднаний з першим входом другої схеми 7 - перший суматор, співпадшня, вихід першої схеми співпадшня 8 - другий суматор, з'єднаний з входом додавання реверсивного 9 - перша схема АБО, лічильника, а вихід другої схеми співпадшня 10 - перший перетворювач напруги в частоту, з'єднаний з входом віднімання цього ж лічильника, 11 - другий перетворювач напруги в частоту, давач крайнього верхнього положення кривошипа 12-тригер, з'єднаний з входом першого формувача імпульсів, 13 - перша схема співпадіння, вихід якого підключений до першого входу першої 14 - друга схема співпадшня, схеми АБО, до першого входу тригера, до входу 15 - елемент часової затримки, елемента часової затримки і до входу "Запис" 16 - реверсивний лічильник, 17- інвертор, першої цифрової пам'яті, давач крайнього 18 - перша цифрова пам'ять, нижнього положення кривошипа з'єднаний з 19 -третя схема співпадіння, входом другого формувача імпульсів, вихід якого 20 - четверта схема співпадшня, підключений до других входів тригера і першої 21 - лічильник, схеми АБО, вихід якої з'єднаний з входом "Запис" 22 - числовий компаратор, аналогового комутатора з пам'яттю, перший вихід 23 - друга цифрова пам'ять, тригера з'єднаний з другим входом першої схеми 24 - дешифратор, співпадшня, а другий його вихід з'єднаний з другим 25 - цифровий задатчик, входом другої схеми співпадшня, вихід 26 - друга схема АБО, реверсивного лічильника з'єднаний з входом 27 - регульований привод верстата-гойдалки першої цифрової пам'яті, а її вихід підключений до Заявлений спосіб реалізують таким чином першого входу числового компаратора і до входу Визначають коефіцієнт заповнення штангової другої цифрової пам'яті, другий вхід числового глибинної помпи і ВІДПОВІДНО до його значення компаратора з'єднаний з виходом цифрового змінюють швидкість обертання двигуна верстатазадатчика, а вихід другої цифрової пам'яті гойдалки, а мірою коефіцієнта заповнення є підключений до входу "Завдання швидкості" різниця площ фігур, сформованих з розгорнутої регульованого привода верстата-гойдалки, вихід динамограми - залежності зусилля в полірованому елемента часової затримки з'єднаний з першими штоці від часу входами третьої і четвертої схем співпадіння і входом "Встановлення нуля" реверсивного Фіксують крайнє нижнє положення лічильника, вихід числового компаратора полірованого штока і значення зусилля в цьому з'єднаний з другим входом третьої схеми положенні Після ЦЬОГО реєструють зміну зусилля в співпадшня і входом інвертора, вихід якого полірованому штоці при ході його вгору і з'єднаний з другим входом четвертої схеми визначають площу фігури, окресленої співпадшня, вихід третьої схеми співпадшня реєстрограмою зусилля та ЛІНІЄЮ зусилля в підключений до входу лічильника, вихід якого крайньому нижньому положенні до моменту через дешифратор з'єднаний з входом "Запис" крайнього верхнього положення Фіксують це другої цифрової пам'яті і першим входом другої положення та значення зусилля в ньому схеми АБО, вихід четвертої схеми співпадшня Реєструють зміну зусилля в полірованому штоці з'єднаний з другим входом другої схеми АБО, при ході його вниз Визначають площу фігури, вихід якої з'єднаний з входом "Встановленя нуля" окресленої реєстрограмою зусилля і ЛІНІЄЮ лічильника зусилля в крайньому верхньому положенні до моменту крайнього нижнього положення Визначають різницю знайдених площ, за якою Суть винаходу пояснюється кресленням, де судять про величину коефіцієнта заповнення зображені глибинної помпи і, в залежності від його значення, - на фіг 1 - блок-схема заявленого пристрою яке зберігається протягом 10-и або якогось іншого для керування електроприводом штангової числа циклів помпування підряд, змінюють глибинної помпи, швидкість обертання двигуна верстата-гойдалки - на фіг 2а - часова залежність зусилля в на один крок, рівний 0,1 від номінальної швидкості полірованому штоці в циклі помпування, знята експериментально на ДІЮЧІЙ свердловині, Згідно з фіг 26 значення зусилля в крайньому нижньому - на фіг 26 - ідеальна часова залежність 60393 положенні полірованого штока в КІНЦІ ходу вниз дорівнює різниці ваги штанги в рідині FLU І сили тертя FT ПІСЛЯ передачі ваги рідини із ліфтових труб на плунжер, аж до кінця ходу його вгору, зусилля в полірованому штоці дорівнює сумі ваги рідини Fp, ваги штанг FLU І СИЛ тертя FT Тому площа розгорнутої динамограми - фігури АВСС", в першій половині циклу помпування дорівнюватиме Si= Г(Рг-(Рш-Рт))сК= jF r dt- y2(Fm-FT)dt(1) О В другій CC'ED'A'A" 0 половині 0 циклу площа фігури S 2 = f(Fp + F m + F T -F H )dt= f(F p -F H )dt+ J(Fm+FT)ee(2) Ц/2 Ц/2 Ц/2 Де Fr i FH - біжучі значення зусилля в полірованому штоці під час ходу його вгору і вниз За умови однакової тривалості ходу вгору і вниз, що можна прийняти з великим ступенем точності для правильно зрівноваженого верстата, який приводиться від асинхронного короткозамкненого двигуна з жорсткою механічною характеристикою, різниця цих площ (фіг 26) дорівнює Si-S2=Fptk, (3) Де tk- тривалість ходу плунжера вниз в незаповненій рідиною частині циліндра Якщо коефіцієнт заповнення циліндра помпи дорівнює одиниці, то точка Е співпадає з точкою С, tk=O, а значить, Si-S2=0 Зменшення коефіцієнта заповнення, зумовлене зниженням динамічного рівня, приводить до збільшення цієї різниці Як слідує із фіг 26 і рівняння (3), значення S1-S2 не залежить від сили тертя FT, ваги штанг FLU, а залежить ТІЛЬКИ ВІД ваги рідини і коефіцієнта заповнення циліндра помпи Сказане відноситься і до реальної динамограми, тому що, як слідує із фіг 2а, коливання зусилля під час ходу вгору і вниз приблизно однакові і в обчисленні площ розгорнутої динамограми запропонованим способом взаємно компенсуються Деяка ВІДМІННІСТЬ характеру цих коливань може бути врахована налагодженням пристрою на конкретному верстаті Як показано на фіг 1, пристрій для керування електроприводом штангової глибинної помпи містить давач зусилля в полірованому штоці 1, давач крайнього верхнього положення кривошипа 2, давач крайнього нижнього положення кривошипа 3, аналоговий комутатор з пам'яттю 4, перший 5 і другий 6 формувачі імпульсів, перший 7 і другий 8 суматори, першу схему АБО 9, перший 10 і другий 11 перетворювачі напруги в частоту, тригер 12, першу 13 і другу 14 схеми співпадшня, елемент часової затримки 15, реверсивний лічильник 16, інвертор 17, першу цифрову пам'ять 18, третю 19 і четверту 20 схеми співпадшня, лічильник 21, числовий компаратор 22, другу цифрову пам'ять 23, дешифратор 24, цифровий задатчик 25, другу схему АБО 26, регульований привод верстата-гойдалки 27 10 Вихід давача зусилля 1 з'єднаний з першими входами першого 7 і другого 8 суматорів і входом аналогового комутатора з пам'яттю 4, вихід якого з'єднаний з другими входами першого 7 і другого 8 суматорів Вихід першого суматора 7 з'єднаний з входом першого 10 перетворювача напруги в частоту, вихід якого з'єднаний з першим входом першої схеми співпадшня 13, а її вихід підключений до входу додавання лічильника 16 Вихід другого суматора 8 з'єднаний з входом другого 11 перетворювача напруги в частоту, вихід якого з'єднаний з першим входом другої схеми співпадшня 14, вихід якої підключений до входу віднімання лічильника 16 Давач 2 крайнього верхнього положення кривошипа з'єднаний з входом першого 5 формувача імпульсів, вихід якого підключений до перших входів першої 9 схеми АБО і тригера 12, до входу елемента часової затримки 15 і довходу "Запис" першої 18 цифрової пам'яті Давач 3 крайнього нижнього положення кривошипа з'єднаний з входом другого 6 формувача імпульсів, вихід якого підключений до другого входу тригера 12 і до другого входу першої схеми АБО 9, вихід якої з'єднаний з входом "Запис" аналогового комутатора з пам'яттю 4 Перший вихід тригера 12 підключений до другого входу першої схеми співпадшня 13, а другий вихід цього тригера з'єднаний з другим входом другої схеми співпадшня 14 Вихід елемента часової затримки 15 з'єднаний з першими входами третьої 19 і четвертої 20 схем співпадшня і з входом "Встановлення нуля" лічильника 16, вихід якого підключений до входу цифрової пам'яті 18, а її вихід з'єднаний з першим входом числового компаратора 22 і входом другої цифрової пам'яті 23 Другий вхід числового компаратора 22 з'єднаний з виходом цифрового задатчика 25 Вихід ЧИСЛОВОГО компаратора 22 з'єднаний з другим входом третьої схеми співпадшня 19 і входом інвертора 17, вихід якого з'єднаний з другим входом четвертої схеми співпадшня 20 Вихід третьої схеми співпадіння 19 з'єднаний з входом лічильника 21, вихід якого підключений до входу дешифратора 24 Вихід дешифратора 24 з'єднаний з першим входом другої схеми АБО 26 і входом "Запис" другої цифрової пам'яті 23, вихід якої з'єднаний з входом "Завдання швидкості" регульованого привода верстата-гойдалки 27 Вихід четвертої схеми співпадшня 20 з'єднаний з другим входом другої схеми АБО 26, вихід якої підключений до входу "Встановлення нуля" лічильника 21 Пристрій працює таким чином На початку ходу полірованого штока вгору за сигналом давача 2 формувач імпульсів 5 через схему АБО 9 запише в аналоговий комутатор з пам'яттю 4 значення зусилля в полірованому штоці, яке контролюється давачем 1, і переключить по першому входу тригер 12 в стан логічної " 1 " Вихідний сигнал на першому виході цього тригера відкриє схему співпадіння 13 для проходження імпульсів від перетворювача 10, частота яких пропорційна визначеній суматором 7 різниці біжучого значення зусилля Fr від давана 1 і зусилля F-i, яке зафіксувалось в аналоговому комутаторі з пам'яттю 4 в нижньому положенні 12 11 60393 полірованого штока, на вхід додавання уставкою, введеною в цифровий задатчик 25 реверсивного лічильника 16 На лічильнику 16 Якщо число, записане в цифрову пам'ять 18, буде накопичується число, пропорційне площі більше або рівне значенню цієї уставки, то розгорнутої в часі динамограми вихідний сигнал компаратора 22 відкриває схему співпадшня 19 для проходження імпульсу в КІНЦІ В крайньому верхньому положенні кожного циклу на лічильник 21 з виходу елемента полірованого штока за сигналом давача 3 другий часової затримки 15 Таким чином лічильник 21 формувач імпульсів 6 через схему АБО 9 запише в фіксує КІЛЬКІСТЬ циклів помпування з коефіцієнтом аналоговий комутатор з пам'яттю 4 нове значення заповнення меншим одиниці Якщо КІЛЬКІСТЬ таких зусилля в полірованому штоці, що контролюється циклів підряд стане більшою числа, що давачем 1, і переключить тригер 12 в стан визначається дешифратором 24, то його вихідний протилежний попередньому В результаті цього на сигнал запише число із цифрової пам'яті 18 в першому його виході буде стан логічного "0", а на цифрову пам'ять 23 і через схему АБО 26 другому - стан логічної " 1 " Вихідний сигнал на встановить лічильник 21 в нульовий стан Цей другому виході цього тригера відкриє схему лічильник також встановлюється в нульовий стан в співпадшня 14 для проходження імпульсів від КІНЦІ циклу помпування вихідним сигналом з перетворювача 11, частота яких пропорційна елемента часової затримки 15 через відкриту визначеній суматором 8 різниці біжучого значення схему співпадшня 20, якщо на виході числового зусилля FH і зусилля F2, зафіксованого аналоговим компаратора 22 буде величина, менша заданої комутатором з пам'яттю 4 в крайньому верхньому (коефіцієнт заповнення менший одиниці) Цим положенні полірованого штока, на вхід віднімання запобігається зменшення швидкості двигуна реверсивного лічильника 16, в якому буде верстата-гойдалки при випадкових змінах рівня накопичуватись число, пропорційне різниці площі рідини у свердловині або помилках в його динамограми в першому ПІВЦИКЛІ помпування і визначенні біжучої площі динамограми другого півциклу В КІНЦІ циклу помпування на лічильнику 16 буде число, пропорційне різниці площ першого і другого півциклів динамограми Тоді знову спрацьовує давач крайнього верхнього положення кривошипа 2 (крайнього нижнього положення полірованого штока) і вихідний сигнал формувача імпульсів 5 запише в цифрову пам'ять 18 число, накопичене в лічильнику 16 за цикл помпування, а через елемент часової затримки 15 встановить лічильник 16 в нуль і в ньому знову почне накопичуватись число, як було описано вище Число, записане в цифрову пам'ять 18 числовим компаратором 22 порівнюється з Число в цифровій пам'яті 23, яке характеризує величину коефіцієнта заповнення циліндра помпи, подається на вхід "Завдання швидкості" обертання двигуна регульованого привода 27 і зменшує його на один крок, рівний 0,1 від номінального значення, що приведе до зниження швидкості двигуна, числа ходів верстата за хвилину і продуктивності глибинної помпи Якщо після такого зниження не наступить рівновага між продуктивністю помпи і притоком рідини у свердловину при динамічному рівні, що забезпечує коефіцієнт заповнення циліндра помпи рівним 1, то описаний процес повториться 1 1 1 1 0 3 6 8 1 1 1 4 t 1 2 23 25 27 15 19 і 22 п 17 ФГ 1 І. 21 24 20 16 60393 14 ФІГ. 2 Комп'ютерна верстка О Кураєв Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling electric drive of beam deep-well pump and appliance for its implementation
Автори англійськоюBulbas Valerii Mykolaiovych, Denys Bohdan Dmytrovych, Kaluzhnyi Bohdan Semenovych, Martynchuk Anastasia Danylivna
Назва патенту російськоюСпособ управления электроприводом штангового глубинного насоса и устройство для его реализации
Автори російськоюБульбас Валерий Николаевич, Денис Богдан Дмитриевич, Калужный Богдан Семенович, Мартынчук Анастасия Даниловна
МПК / Мітки
МПК: E21B 43/00
Мітки: електроприводом, пристрій, штангової, керування, глибинної, реалізації, спосіб, помпи
Код посилання
<a href="https://ua.patents.su/7-60393-sposib-keruvannya-elektroprivodom-shtangovo-glibinno-pompi-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування електроприводом штангової глибинної помпи та пристрій для його реалізації</a>
Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза

Номер патенту: 60932
Опубліковано: 15.10.2003
Автори: Коваленко Павло Михайлович, Іван Стоілов, Калус Костянтин Якович, Мєнта Мєнтєшєв, Кирил Джустров, Гураль Василь Володимирович
МПК: B60L 15/20
Мітки: пристрій, рудникового, швидкістю, руху, електровоза, керування, електроприводом, акумуляторного
Формула / Реферат:
1. Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза, що містить акумуляторну батарею, до виходу якої підключені елементи кола тягових двигунів, датчик напруги акумуляторної батареї, датчики швидкості тягових двигунів, який відрізняється тим, що у коло тягових двигунів додатково, через автоматичний роз'єднувач, вхід якого з'єднаний з виходом акумуляторної батареї, та головний контактор, підключені...
Пристрій для керування частотно-регулівним електроприводом
Номер патенту: 8822
Опубліковано: 30.09.1996
Автори: Грінченко Олександр Семенович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: пристрій, електроприводом, керування, частотно-регулівним
Формула / Реферат:
Устройство для управления частотно-регулируемым электроприводом, содержащее статический преобразователь частоты, снабженный клеммами для подключения питающей сети и асинхронного двигателя, системы управления напряжением и частотой, подключенные выходами к соответствующим управляющим входам статического преобразователя частоты, регулятор частоты и регулятора тока, каждый с двумя входами, узел задания, датчик частоты вращения, датчики тока...
Спосіб глибинної технології вирощування просапних культур та пристрій для його здійснення
Номер патенту: 20706
Опубліковано: 07.10.1997
Автори: Радзієвський Леонід Леонідович, Іванько Іван Павлович, Гершкул Іван Павлович, Рогатинський Василь Іванович, Шмат Сергій Іванович
МПК: A01C 7/00
Мітки: культур, спосіб, глибинної, просапних, здійснення, вирощування, технології, пристрій
Формула / Реферат:
1. Спосіб глибинної технології вирощування просапних культур, що включає прорізування щілини та створення борозни, по якій проходить сошник, який відрізняється тим, що борозна утворюється перед проходом посівної секції і глибина її дорівнює глибині сухого прошарку грунту.2. Спосіб по п. 1, який відрізняється тим, що при стерньовому посіві борозноутворговач встановлюють на глибину ходу сошника посівної секції.3. Пристрій для...
Пристрій для керування асинхронним електроприводом
Номер патенту: 16864
Опубліковано: 29.08.1997
Автори: Гринченко Олександр Сергійович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: асинхронним, пристрій, електроприводом, керування
Формула / Реферат:
(57) Устройство для управления асинхронным электроприводом, содержащее управляемый выпрямитель с выводами для подключения питающей сети и с системой управления, соединенной своим входом с выходом регулятора тока, подключенного одним из своих входов к выходу датчика тока управляемого выпрямителя, сглаживающий LC-фильтр, включенный между выходом управляемого выпрямителя и входом инвертора, систему управления инвертором, входом...
Спосіб вимірювання ваги на гаку та пристрій для його реалізації
Номер патенту: 21235
Опубліковано: 04.11.1997
Автори: Калужний Богдан Семенович, Мартинчук Анастасія Данилівна, Рибчич Ілля Йосипович, Денис Богдан Дмитрович
МПК: E21B 47/00
Мітки: спосіб, ваги, гаку, вимірювання, реалізації, пристрій
Формула / Реферат:
1. Спосіб вимірювання ваги на гаку, що базується на визначенні величини натягу нерухомого кінця талевої линви, який відрізняється тим, що як пружний чутливий елемент використовують талеву линву, визначають її величину розтягу через кут повороту нерухомого шківа кронблока, для чого перед спуском бурильного інструменту, при відсутності ваги на гаку, фіксують умовний нуль кута повороту, компонують низ бурильної колони з наперед визначеним...
Попередній патент: Автоматизована система синтаксичного аналізу для мікропроцесорних пристроїв
Наступний патент: Модифікований порошок цинку
Випадковий патент: Спосіб препарування фронтальних зубів під непрямі керамічні реставрації