Спосіб гальмування асинхронного двигуна та пристрій для його реалізації
Номер патенту: 62098
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Гладир Андрій Іванович, Огарь Олександр Сергійович, Родькін Дмитро Йосипович
Формула / Реферат
1. Спосіб гальмування асинхронного двигуна, що включає підключення асинхронного двигуна через тиристорний регулятор напруги із системою імпульсно-фазового керування до джерела промислової частоти, який відрізняється тим, що розраховують різницю між завданням і фактичною швидкістю обертання, сигнал похибки подають на генератор і формують вихідний сигнал на систему імпульсно-фазового керування у вигляді періодичного сигналу з частотою близько 50 Гц, якщо частота становить 45-48 Гц, створюється значний гальмуючий момент, якщо 52-55 Гц, створюється малий гальмуючий момент при вказаному діапазоні швидкості обертання ротора двигуна.
2. Пристрій, який реалізує спосіб гальмування асинхронного двигуна, що містить асинхронний двигун, тиристорний регулятор напруги із системою управління, що підключені до трифазної мережі змінного струму, який відрізняється тим, що він додатково обладнаний генератором частоти, вихід якого зв'язаний із другим входом системи імпульсно-фазового керування, перший вхід генератора зв'язаний з першим входом системи імпульсно-фазового керування і виходом суматора через блок нелінійності струму вентиля, перший вхід суматора зв'язаний із сигналом завдання на швидкість обертання, а другий вхід зв'язаний з датчиком швидкості обертання, який знаходиться на валу двигуна.
Текст
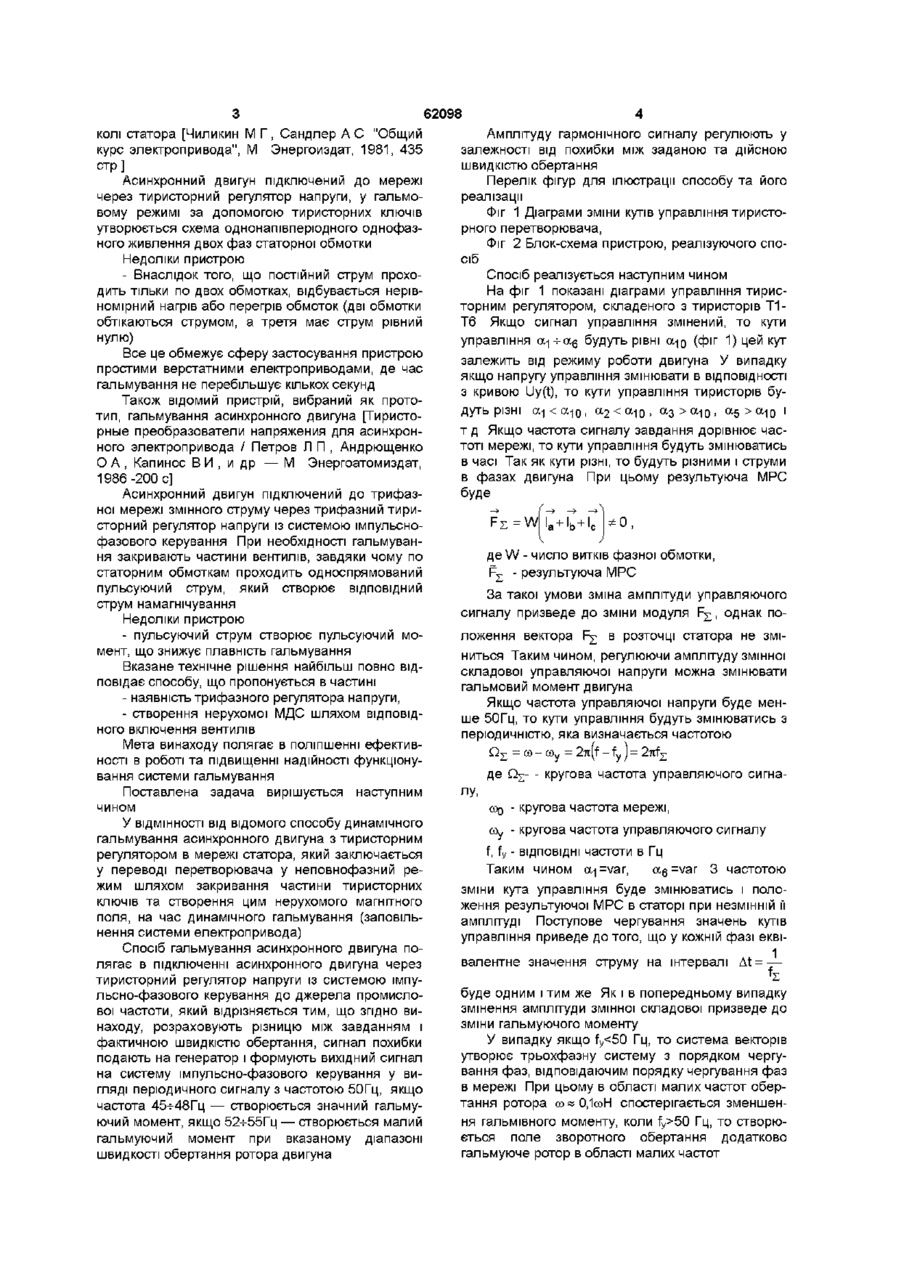
1 Спосіб гальмування асинхронного двигуна, що включає підключення асинхронного двигуна через тиристорний регулятор напруги із системою імпульсно-фазового керування до джерела промислової частоти, який відрізняється тим, що розраховують різницю між завданням і фактичною швидкістю обертання, сигнал похибки подають на генератор і формують вихідний сигнал на систему імпульсно-фазового керування у вигляді періодичного сигналу з частотою близько 50 Гц, якщо час тота становить 45-48 Гц, створюється значний гальмуючий момент, якщо 52-55 Гц, створюється малий гальмуючий момент при вказаному діапазоні швидкості обертання ротора двигуна 2 Пристрій, який реалізує спосіб гальмування асинхронного двигуна, що містить асинхронний двигун, тиристорний регулятор напруги із системою управління, що підключені до трифазної мережі змінного струму, який відрізняється тим, що він додатково обладнаний генератором частоти, вихід якого зв'язаний із другим входом системи імпульсно-фазового керування, перший вхід генератора зв'язаний з першим входом системи імпульсно-фазового керування і виходом суматора через блок нелінійності струму вентиля, перший вхід суматора зв'язаний із сигналом завдання на швидкість обертання, а другий вхід зв'язаний з датчиком швидкості обертання, який знаходиться на валу двигуна Передбачуваний винахід відноситься до електротехніки, а саме - до автоматизованого асинхронного електроприводу з тиристорним управлінням в колі статора Відомий спосіб і технічне рішення автоматизованого асинхронного електроприводу з тиристорним управлінням в колі статора [Чиликин М Г, Сандлер А С "Общий курс электропривода", М Энергоиздат, 1981, 435 стр ] У гальмовому режимі за допомогою тиристорних ключів утворюється схема однонапівперюдного однофазного живлення двох фаз статорної обмотки, (наприклад, фаз А та Б) Спосіб гальмування має такі недоліки - Ефективність гальмування низька внаслідок того, що результуюча магніторухома (МРС) сила утворюється тільки двома обмотками Для створення необхідної МРС потрібно значний статорний струм, - Постійний струм проходить тільки по двох обмотках відбувається нерівномірний нагрів або перегрів обмоток (дві обмотки обтікаються струмом, а третя має струм рівний нулю) - Необхідність переводу в режим динамічного гальмування складними операціями по комутації ланок управління тиристорними ключами Це обумовлює складність системи в цілому Все це обмежує сферу застосування пристрою простими верстатними електроприводами, де час гальмування не перебільшує кількох секунд Також відомий спосіб, вибраний як прототип, динамічного гальмування асинхронного двигуна який включає трифазний тиристорний регулятор напруги із системою імпульснофазового керування підключений до трифазної мережі змінного струму При необхідності гальмування закривають частини вентилів, завдяки чому по статорним обмоткам проходить односпрямований пульсуючий струм, який створює ВІДПОВІДНИЙ струм намагнічування [Гиристорные преобразователи напряжения для асинхронного электропривода/ Петров Л П , Андрющенко О А , Капинос В И и др - М Энергоатомиздат, 1986 -200 с ] Недоліками способу є - Складність системи силового модуля та силової контакторної апаратури для переводу двигуна у режимі динамічного гальмування Відомий пристрій автоматизованого асинхронного електроприводу з тиристорним управлінням в 00 о (О 62098 колі статора [Чиликин М Г , Сандлер А С "Общий курс электропривода", М Энергоиздат, 1981, 435 стр] Асинхронний двигун підключений до мережі через тиристорний регулятор напруги, у гальмовому режимі за допомогою тиристорних ключів утворюється схема однонапівперіодного однофазного живлення двох фаз статорної обмотки Недоліки пристрою - Внаслідок того, що постійний струм проходить тільки по двох обмотках, відбувається нерівномірний нагрів або перегрів обмоток (дві обмотки обтікаються струмом, а третя має струм рівний нулю) Все це обмежує сферу застосування пристрою простими верстатними електроприводами, де час гальмування не перебільшує кількох секунд Також відомий пристрій, вибраний як прототип, гальмування асинхронного двигуна [Гиристорные преобразователи напряжения для асинхронного электропривода / Петров Л П , Андрющенко О А , Капинос В И , и др — М Энергоатомиздат, 1986-200 с] Асинхронний двигун підключений до трифазної мережі змінного струму через трифазний тиристорний регулятор напруги із системою імпульснофазового керування При необхідності гальмування закривають частини вентилів, завдяки чому по статорним обмоткам проходить односпрямований пульсуючий струм, який створює ВІДПОВІДНИЙ струм намагнічування Недоліки пристрою - пульсуючий струм створює пульсуючий момент, що знижує плавність гальмування Вказане технічне рішення найбільш повно відповідає способу, що пропонується в частині - наявність трифазного регулятора напруги, - створення нерухомої МДС шляхом ВІДПОВІДНОГО включення вентилів Мета винаходу полягає в поліпшенні ефективності в роботі та підвищенні надійності функціонування системи гальмування Поставлена задача вирішується наступним чином У ВІДМІННОСТІ від відомого способу динамічного гальмування асинхронного двигуна з тиристорним регулятором в мережі статора, який заключається у переводі перетворювача у неповнофазний режим шляхом закривання частини тиристорних ключів та створення цим нерухомого магнітного поля, на час динамічного гальмування (заповільнення системи електропривода) Спосіб гальмування асинхронного двигуна полягає в підключенні асинхронного двигуна через тиристорний регулятор напруги із системою імпульсно-фазового керування до джерела промислової частоти, який відрізняється тим, що згідно винаходу, розраховують різницю між завданням і фактичною швидкістю обертання, сигнал похибки подають на генератор і формують вихідний сигнал на систему імпульсно-фазового керування у вигляді періодичного сигналу з частотою 50Гц, якщо частота 45-ь48Гц — створюється значний гальмуючий момент, якщо 52-ь55Гц — створюється малий гальмуючий момент при вказаному діапазоні швидкості обертання ротора двигуна Амплітуду гармонічного сигналу регулюють у залежності від похибки між заданою та дійсною швидкістю обертання Перелік фігур для ілюстрації способу та його реалізації Фіг 1 Діаграми зміни кутів управління тиристорного перетворювача, Фіг 2 Блок-схема пристрою, реалізуючого спосіб Спосіб реалізується наступним чином На фіг 1 показані діаграми управління тиристорним регулятором, складеного з тиристорів Т1Т6 Якщо сигнал управління змінений, то кути управління а-|-ьае будуть рівні а-ю (фіг 1) цей кут залежить від режиму роботи двигуна У випадку якщо напругу управління змінювати в ВІДПОВІДНОСТІ з кривою Uy(t), то кути управління тиристорів будуть різні а-|а-ю і т д Якщо частота сигналу завдання дорівнює частоті мережі, то кути управління будуть змінюватись в часі Так як кути різні, то будуть різними і струми в фазах двигуна При цьому результуюча МРС буде FZ=W| де W - число витків фазної обмотки, F z - результуюча МРС За такої умови зміна амплітуди управляючого сигналу призведе до зміни модуля F^, однак положення вектора F^ в розточці статора не зміниться Таким чином, регулюючи амплітуду змінної складової управляючої напруги можна змінювати гальмовий момент двигуна Якщо частота управляючої напруги буде менше 50Гц, то кути управління будуть змінюватись з періодичністю, яка визначається частотою гл о U t \ о f LJy = CO— C0u = ZH\\ — Tu = ZTlTy де Q s - - кругова частота управляючого сигналу, - кругова частота мережі, соу - кругова частота управляючого сигналу f, fy - ВІДПОВІДНІ частоти в Гц Таким чином a-]=var, ag =var 3 частотою зміни кута управління буде змінюватись і положення результуючої МРС в статорі при незмінній її амплітуді Поступове чергування значень кутів управління приведе до того, що у кожній фазі еквівалентне значення струму на інтервалі At = — f z буде одним і тим же Як і в попередньому випадку змінення амплітуди змінної складової призведе до зміни гальмуючого моменту У випадку якщо fy50 Гц, то створюється поле зворотного обертання додатково гальмуюче ротор в області малих частот 62098 Таким чином поставлена задача реалізується шляхом управління перетворювача за допомогою вхідного сигналу, який застосовується з частотою близько 50 Гц, гальмівний момент застосовується шляхом застосування амплітуди періодичного управляючого сигналу Блок схема пристрою представлена на фіг 2 Пристрій, що реалізує спосіб включає асинхронний двигун 1 який через тиристорний регулятор напруги 2 із системою управління 3 підключений до трифазної мережі змінного струму, який відрізняється тим, що він додатково обладнаний генератором частоти 6 з першим і другим управляючими входами Сигнали з першого і другого входів блока 6 сумуються і поступають на аналогово-цифровий перетворювач блока 6, змінюючи амплітуду задаючого сигналу на виході зв'язаному із другим входом блока 3, перший вхід блока 6 зв'язаний з першим входом блока 3 і виходом суматора 4 через блок 7, на перший блока 4 подається сигнал завдання на швидкість обертання, а другий вхід зв'язаний з датчиком швидкості обертання 5 який знаходиться на валу двигуна 1 При роботі двигуна в двигунному режимі сигнал на вході блоку 2 більше нуля, в наслідок чого Комп'ютерна верстка М Клюкш кут управління тиристорами менше — і двигун працює в двигунному режимі з деяким моментом на валу Якщо необхідно гальмування машини, то ІІз зменшують В результаті сигнал Дії = U y 1 стає від'ємним І на перший вхід блока 6, перший вхід блока 3 надійде згаданий сигнал При цьому якщо Дії >0, то на 1-й вхід блоку 6 напруга не надійде так як блок 7 знаходиться в положенні "закрито" Блок 7 в першому приближенні - діод При ВІД'ЄМНІЙ полярності поступає напруга на вхід 1 блока 6, (віднімаючись) з напругою Uyr В результаті напруга на виході блоку буде зростати і тим самим на вході СІФУ (системи імпульсно-фазового управління) з'явиться періодичний сигнал, величина якого буде залежати від помилки Дії Електропривод буде внаслідок цього уповільнюватись Технічні рішення за допомогою яких створюються генератор з регулюємою частотою, а також пристрої цифрового регулювання, опору, напруги і струму є відомими елементами і тому в матеріалах заявки не приводяться Блоки 1, 2, 3, 4, 5 типові блоки систем автоматичного управління електроприводом Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for breaking an asynchronous motor and the device for the realization of the method
Автори англійськоюRodkin Dmytro Yosypovych, Hladyr Andrii Ivanovych, Chornyi Oleksii Petrovych
Назва патенту російськоюСпособ торможения асинхронного электродвигателя и устройство для осуществления способа
Автори російськоюРодькин Дмитрий Иосифович, Гладыр Андрей Иванович, Черный Алексей Петрович
МПК / Мітки
МПК: G01R 31/34
Мітки: спосіб, пристрій, реалізації, гальмування, асинхронного, двигуна
Код посилання
<a href="https://ua.patents.su/3-62098-sposib-galmuvannya-asinkhronnogo-dviguna-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб гальмування асинхронного двигуна та пристрій для його реалізації</a>
Спосіб гальмування двигуна постійного струму і пристрій для його реалізації
Номер патенту: 47111
Опубліковано: 17.06.2002
Автор: Дрючін Олександр Олексійович
МПК: H02P 3/06
Мітки: гальмування, постійного, пристрій, двигуна, спосіб, реалізації, струму
Формула / Реферат:
1. Спосіб гальмування двигуна постійного струму, при якому величину струму гальмування встановлюють зміною часу замикання якоря двигуна, а частину енергії двигуна передають до мережі, який відрізняється тим, що на інтервалах між замиканнями до якоря підключають реактивний накопичувач, в якому здійснюють попереднє накопичення енергії двигуна і вихідну напругу якого порівнюють з верхньою і нижньою межами і рівнем мережі, при перевищенні рівня...
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Пасмурских Олександр Олексійович, Вошун Олексій Миколайович, Сисюк Геннадій Юрійович, Луговой Анатолій Васильович, Чорний Олексій Петрович, Добрецов Володимир Валентинович, Долженко Віктор Володимирович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: двигуна, ротором, діагностики, асинхронного, здійснення, короткозамкненим, пристрій, параметрів, спосіб
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Спосіб діагностики асинхронного двигуна та пристрій для його здійснення
Номер патенту: 50115
Опубліковано: 15.10.2002
Автори: Головко Олег Степанович, Чорний Олексій Петрович, Гладир Андрій Іванович, Родькін Дмитро Йосипович, Лашко Юрій Вікторович, Волощенко Олександр Михайлович
МПК: G01R 31/34
Мітки: здійснення, асинхронного, пристрій, спосіб, двигуна, діагностики
Формула / Реферат:
1. Спосіб діагностики асинхронного двигуна, який полягає в підключенні асинхронного двигуна через тиристорний регулятор до джерела промислової частоти та вимірюванні миттєвих значень напруги та струму статорного ланцюга, який відрізняється тим, що за даними вимірів розраховують миттєві значення електромагнітного моменту АД, за допомогою обчислювального блока також розраховують значення електромагнітного моменту АД за паспортними даними,...
Спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією та пристрій для його реалізації
Номер патенту: 40223
Опубліковано: 16.07.2001
Автори: Коржикова Ольга Валеріївна, Темченко Анатолій Георгійович, Шевченко Олександр Іванович, Родькін Дмитро Йосипович, Корнет Владислав Миколайович, Кожушок Геннадій Миколайович, Величко Тетяна Володимирівна
МПК: H02P 9/00, H02J 7/14, H02P 9/14
Мітки: транспортного, реалізації, енергетичною, установкою, автономною, засобу, трансмісією, пристрій, електромеханічною, спосіб, гальмування
Формула / Реферат:
1. Спосіб гальмування транспортного засобу з автономною енергетичною установкою і електромеханічною трансмісією, що полягає в відключенні тягових двигунів від генератора і замиканні їх на гальмівні опори, контролі швидкості й струму якірних кіл тягових двигунів, швидкості первинного теплового двигуна й живленні власних потреб транспортного засобу від первинного теплового двигуна, який відрізняється тим, що гальмування здійснюють з...
Спосіб керування асинхронним двигуном та пристрій для його реалізації
Номер патенту: 62097
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Сичов Сергій Дмитрович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: реалізації, спосіб, керування, асинхронним, двигуном, пристрій
Формула / Реферат:
1. Спосіб керування асинхронним двигуном, що включає підключення асинхронного двигуна через перетворювач напруги до джерела промислової частоти, вимірювання миттєвих значень напруги та струму статорного ланцюга та розрахунок моменту двигуна, який відрізняється тим, що за даними вимірів розраховують миттєву потужність та момент двигуна, вилучають змінну складову моменту та подають на регулятор системи імпульсно-фазового керування тиристорним...
Попередній патент: Консольний насосний агрегат
Наступний патент: Прилад для контролю рівності автомобільної дороги
Випадковий патент: Спосіб установлення кута пострілу із зброї з дульно-гальмовим пристроєм відносно ураженого об'єкту на близькій відстані