Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс
Номер патенту: 63186
Опубліковано: 26.09.2011
Автори: Дергачов Костянтин Юрьєвич, Кулік Анатолій Степанович, Степанов Федір Володимирович

Формула / Реферат
Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс, що містить багатоканальний радіоприймач, вхід якого через підсилювач пов'язаний з антеною, а його виходи підключені до першої групи входів обчислювача місця розташування супутників, блок початкової установки альманаху даних про супутники, підключений виходами до другої групи входів обчислювача місця розташування супутників, таймер, підключений виходом до синхронізуючого входу блока комплексування інформації й обчислювача місця розташування супутників, а його виходи з'єднані з входами блока виділення радіовидимості супутників, підключеного виходами до входів блока вибору робочого сузір'я супутників, виходи якого з'єднані з входами блока обчислення місцезнаходження користувача, а також містить вимірювачі проекцій абсолютної кутової швидкості і вимірювачі проекцій вектора уявного прискорення, осі чутливості яких розташовані по трьох осях зв'язаної системи координат OXYZ, який відрізняється тим, що містить вимірювач проекції абсолютної кутової швидкості та вимірювач проекції вектора уявного прискорення, які розташовані на додатковій осі R, яка лежить під однаковим кутом від осей X, Y, Z, підключені до блока контролю справності вимірювачів проекцій абсолютної кутової швидкості та блока контролю справності вимірювачів проекцій вектора уявного прискорення, виходи яких підключені до входів обчислювача початкових даних, а також відповідно через коректор кутової швидкості і коректор уявного прискорення до входів блока комплексування інформації та обчислювача навігаційних параметрів, виходи якого з'єднані з входами блока цифрових дисплеїв, при цьому виходи блока обчислювача початкових даних підключені до входів обчислювача навігаційних параметрів та блока комплексування інформації, виходи якого з'єднані обчислювачем початкових даних, коректором кутової швидкості, коректором уявного прискорення та блоком вибору робочого сузір'я супутників, а виходи блока обчислення місцезнаходження користувача з'єднані зі входами блока комплексування інформації та обчислювачем початкових даних.
Текст
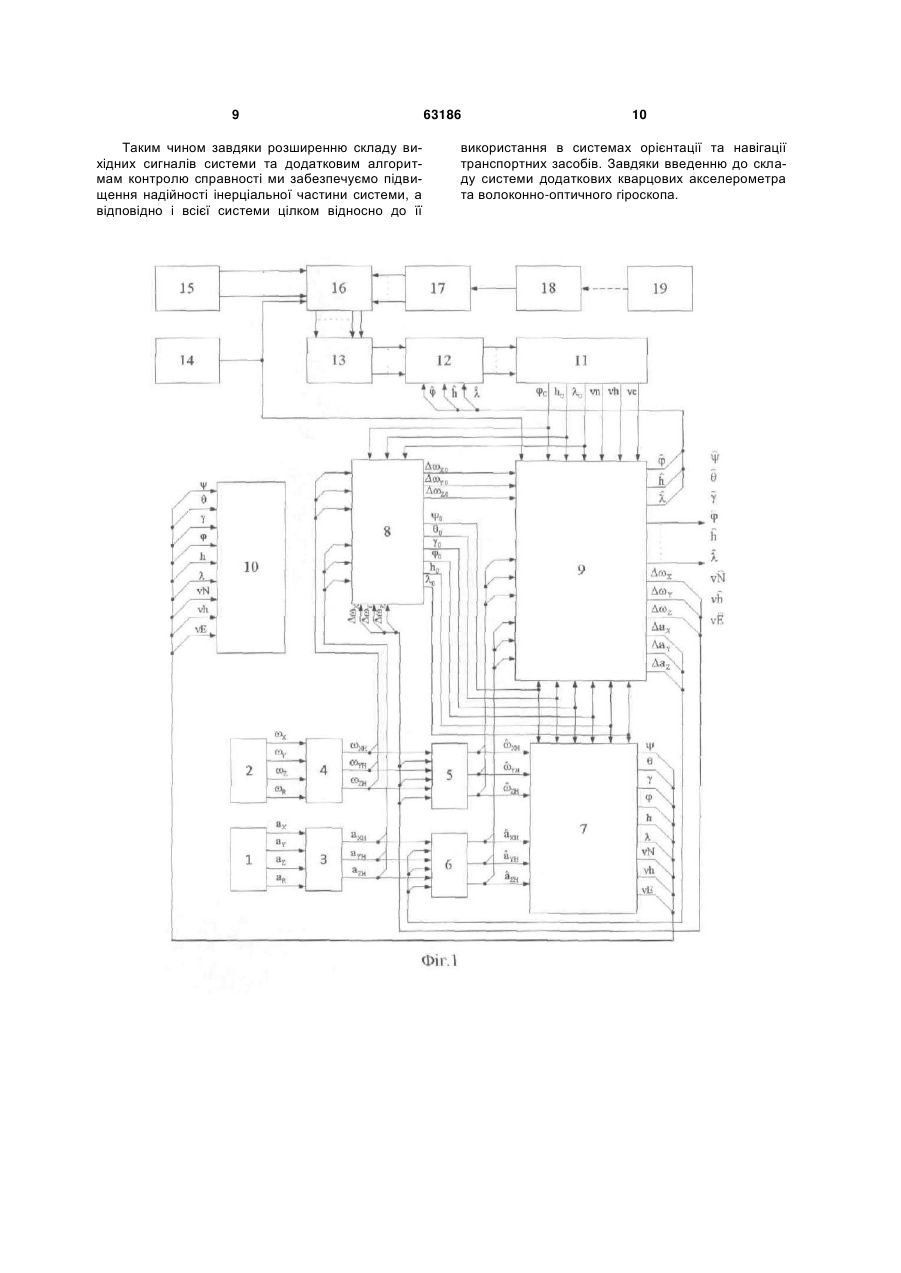
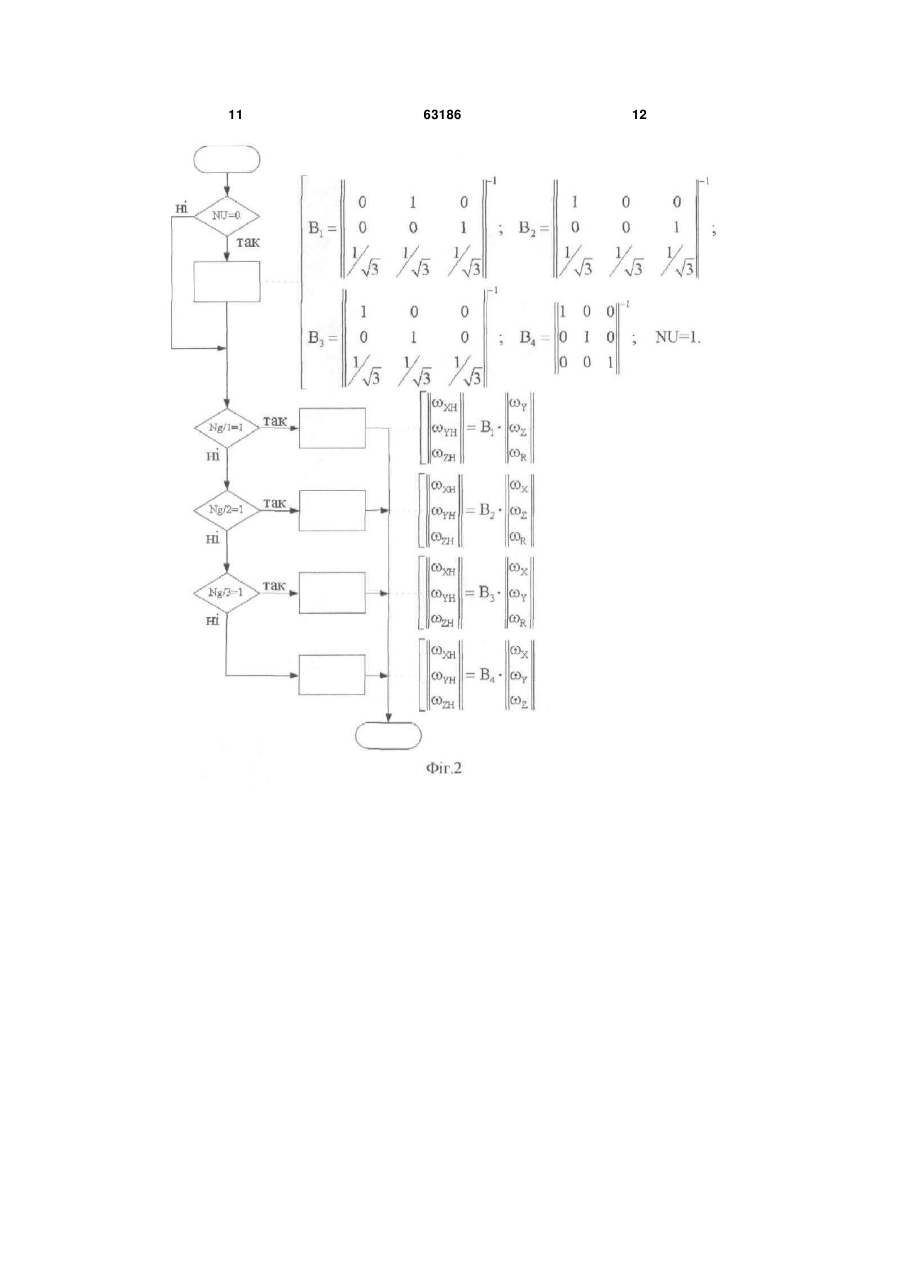
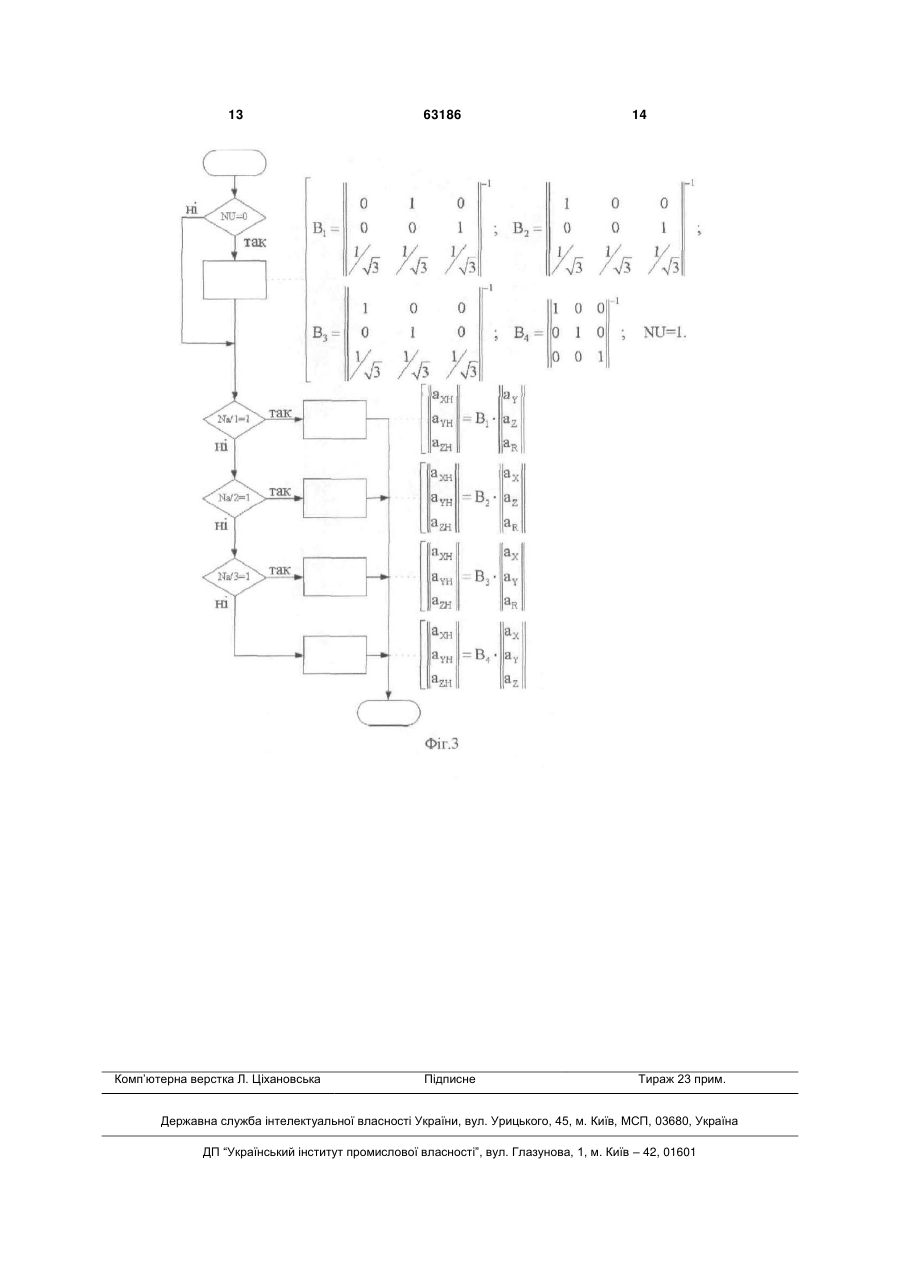
Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс, що містить багатоканальний радіоприймач, вхід якого через підсилювач пов'язаний з антеною, а його виходи підключені до першої групи входів обчислювача місця розташування супутників, блок початкової установки альманаху даних про супутники, підключений виходами до другої групи входів обчислювача місця розташування супутників, таймер, підключений виходом до синхронізуючого входу блока комплексування інформації й обчислювача місця розташування супутників, а його виходи з'єднані з входами блока виділення радіовидимості супутників, підключеного виходами до входів блока вибору робочого сузір'я супутників, виходи якого з'єднані з входами блока обчислення місцезнаходження користувача, а також містить вимірювачі проекцій абсолютної кутової швидкості і вимі U 2 63186 1 3 мер, підключений виходом до синхронізуючого входу обчислювача місця розташування супутників, а його виходи з'єднані з входами блока виділення радіовидимості супутників, підключеного виходами до входів блока вибору робочого сузір'я супутників, виходи якого з'єднані з входами блока обчислення місцезнаходження користувача, а також вимірювач проекцій абсолютної кутової швидкості і вимірювач проекцій вектора уявного прискорення, підключені відповідно через коректор кутової швидкості та коректор уявного прискорення до обчислювача навігаційних параметрів, в яку додатково введені блок комплексування інформації та обчислювач початкових даних, входи з першого по третій якого з'єднані з однойменними входами коректора кутової швидкості і виходами вимірювача проекцій абсолютної кутової швидкості, входи з четвертого по шостий з'єднані відповідно з виходами вимірювача проекцій вектора уявного прискорення і з входами з першого по третій коректора уявного прискорення, при цьому друга група входів з'єднана з входами з четвертого по шостий коректора кутової швидкості і підключена до виходів з тринадцятого по п'ятнадцятий блока комплексування інформації, а третьою групою з трьох входів з'єднаний з входами з сімнадцятого по дев'ятнадцятий блока комплексування інформації та підключений до виходів з першого по третій блока обчислення місцезнаходження користувача, інші виходи якого з четвертого по шостий пов'язані з входами з двадцятого по двадцять другий блока комплексування інформації безпосередньо, при цьому виходи обчислювача початкових даних з четвертого по дев'ятий пов'язані з другою групою входів з шести обчислювача навігаційних параметрів і з входами з десятого по п'ятнадцятий блока комплексування інформації, а виходи з першого по третій безпосередньо пов'язані з входами з сьомого по дев'ятий блока комплексування інформації, перша група входів з першого по шостий якого зв'язана з однойменними входами обчислювача навігаційних параметрів, дев'ять виходів якого з'єднані з однойменними виходами системи безпосередньо, і підключена відповідно до трьох виходів коректора кутової швидкості і трьох виходів коректора уявного прискорення, а шістнадцятий вхід пов'язаний з виходом таймера, при цьому виходи блока комплексування інформації з першого по третій з'єднані з другою групою входів блока вибору робочого сузір'я супутників, виходи з шістнадцятого по вісімнадцятий підключені відповідно до входів з четвертого по шостий коректора уявного прискорення, а виходи з четвертого по дванадцятий з'єднані з виходами системи з десятого по вісімнадцятий безпосередньо. До недоліків такої системи відносяться низька надійність роботи інерціальних засобів визначення місцезнаходження. Задачею корисної моделі є підвищення надійності інтегрованої інерціально-супутникової навігаційної системи. Поставлена задача досягається тим, що у відмовостійкому інерціально-супутниковому автоматизованому навігаційному комплексі, що містить багатоканальний радіоприймач, вхід якого через 63186 4 підсилювач пов'язаний з антеною, а його виходи підключені до першої групи входів обчислювача місця розташування супутників, блок початкової установки альманаху даних про супутники підключений виходами до другої групи входів обчислювача місця розташування супутників, таймер підключений виходом до синхронізуючого входу обчислювача місця розташування супутників, а його виходи з'єднані з входами блока виділення радіовидимості супутників, підключеного виходами до входів блока вибору робочого сузір'я супутників, виходи якого з'єднані з входами блока обчислення місцезнаходження користувача, згідно з корисною моделлю до неї додатково до вимірювачів проекцій абсолютної кутової швидкості та вимірювачів проекцій вектора уявного прискорення, осі чутливості яких розташовані по трьох осях зв'язаної системи координат OXYZ, введені вимірювач проекції абсолютної кутової швидкості та вимірювач проекції вектора уявного прискорення, осі чутливості яких розташовані на уявній додатковій осі R, яка лежить під однаковим кутом від осей X, Y, Z, підключені до блока контролю справності вимірювачів проекцій абсолютної кутової швидкості та блока контролю справності вимірювачів проекцій вектора уявного прискорення, виходи яких підключені до входів обчислювача початкових даних, а також відповідно через коректор кутової швидкості і коректор уявного прискорення до блока комплексування інформації та обчислювача навігаційних параметрів, виходи якого з'єднані з входами блока цифрових дисплеїв, виходи блока обчислювача початкових даних підключені до входів обчислювача навігаційних параметрів та блока комплексування інформації, виходи якого з'єднані обчислювачем початкових даних, коректором кутової швидкості, коректором уявного прискорення та блоком вибору робочого сузір'я супутників, виходи блока обчислення місцезнаходження користувача з'єднані з входами блока комплексування інформації та обчислювачем початкових даних. На фіг.1 приведена блок-схема запропонованої системи; на фіг.2 - блок-схема блока контролю справності вимірювачів проекцій абсолютної кутової швидкості; на фіг.3 - блок-схема блока контролю справності вимірювачів проекцій вектора уявного прискорення. На фіг.1 введені позначення: a X , a Y ,a Z ,aR - проекції вектора уявного прискорення у зв'язаній системі координат; X, Y , Z, R - проекції вектора абсолютної кутової швидкості у зв'язаній системі координат; a XH,a YH,a ZH та XH, YH, ZH проекції вектора уявного прискорення та проекції вектора абсолютної кутової швидкості у зв'язаній (номінальній) системі координат відповідно; ˆ ˆ ˆ ˆ ˆ ˆ a XH,a YH,a ZH та XH, YH, ZH - проекції вектора уявного прискорення та проекції вектора абсолютної кутової швидкості у зв'язаній (номінальній) системі координат відповідно, із урахуванням помилок a X, a Y , aZ та X, Y , Z ; 5 X0, Y0, Z0 - помилки вимірювання проекцій абсолютної кутової швидкості, отримані при попередньому ввімкненні системи та зчитані з енергонезалежної пам'яті обчислювача початкових даних; 0 , 0 , 0 - початкові значення кутів курсу, тангажа та крену відповідно; 0, h0, 0 - початкові значення широти, висоти та довготи відповідно; , h, - скореговані з допомогою оптимального фільтра Калмана значення широти, висоти та довготи транспортного засобу; , , - скореговані з допомогою оптимального фільтра Калмана значення курсу, тангажа та крену транспортного засобу; vN, vh, vE - скореговані з допомогою оптимального фільтра Калмана значення швидкості транспортного засобу; ˆ ˆ ˆ , h, - не скореговані від супутникової інформації значення широти, висоти та довготи; , h, - географічні координати; , , - кути орієнтації транспортного засобу відповідно географічного меридіану та площини місцевого горизонту; vN, vh, vE - північна вертикальна і східна складові відносної швидкості поступального руху транспортного засобу відповідно; c , hc , c - географічні координати отримані за допомогою супутникової інформації. В якості вимірювачів можуть бути застосованими, наприклад, чотири кварцових акселерометри та чотири волоконно-оптичних гіроскопів, осі яких утворюють зв'язану з транспортним засобом систему координат та додаткову вісь R. Решта блоків запропонованої системи реалізують алгоритми прототипу. Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс містить вимірювачі 1 проекцій вектора уявного прискорення (ВПВУП), з'єднані з блоком 3 контролю справності вимірювачів проекцій вектора уявного прискорення (БКСВПВУП), виходи вимірювачів 2 проекцій абсолютної кутової швидкості (ВПАКШ) з'єднані з входами блока 4 контролю справності вимірювачів проекцій абсолютної кутової швидкості (БКСВПАКШ), виходи блока 3 контролю справності вимірювачів проекцій вектора уявного прискорення та блока 4 контролю справності вимірювачів проекцій абсолютної кутової швидкості з'єднані з входами блока коректора 5 кутової швидкості (ККШ), коректора 6 уявного прискорення (КУП), та обчислювача 8 початкових даних (ОПД), виходи обчислювача 8 початкових даних підключені до входів обчислювача 7 навігаційних параметрів (ОНП) та блока 9 комплексування інформації (БКІ), виходи обчислювача 7 навігаційних параметрів з'єднані з входами блока 10 цифрових дисплеїв (БЦД), виходи блока 9 комплексування інформації підключені до входів обчислювача 8 початкових даних, коректора 5 кутової швидкості та коректора 6 уявного прискорення, виходи коректора 5 кутової 63186 6 швидкості та виходи коректора 6 уявного прискорення з'єднані з входами блока 9 комплексування інформації та обчислювача 7 навігаційних параметрів, виходи обчислювача 7 навігаційних параметрів з'єднані з входами блока 12 вибору робочого сузір'я супутників (БВРСС), виходи якого з'єднані через блок 11 обчислення місцезнаходження користувача (БОМЗК) з входами блока 9 комплексування інформації та обчислювача 8 початкових даних, входи блока 12 вибору робочого сузір'я супутників з'єднані з виходами блока 13 виділення радіовидимості супутників (БВРВС), входи якого з'єднані з виходами обчислювача 16 місця розташування супутників (ОМРС), багатоканальний радіоприймач 17 підключений через підсилювач 18 з антеною 19, виходи таймера 14 з'єднані з входами обчислювача 16 місця розташування супутників та блока 9 комплексування інформації, входи обчислювача 16 місця розташування супутників з'єднані з виходами багатоканального радіоприймача 17 та виходами блока 15 початкової установки альманаху даних про супутники (БПУАДС); Запропонований відмовостійкий інерціальносупутниковий автоматизований навігаційний комплекс (ВІСАНК) працює наступним чином. Початковою інформацією для формування вихідних параметрів ВІСАНК є сигнали з трьох пов'язаних з корпусом літака і встановлених ортогонально один щодо одного волоконно-оптичних гіроскопів та четвертого розташованого під однаковим кутом до осей X,Y,Z гіроскопів, і сигнали з чотирьох аналогічно розташованих акселерометрів. Сигнали з волоконно-оптичних гіроскопів, пропорційні проекціям вектора абсолютної кутової швидкості XH, YH, ZH , і сигнали з кварцових акселерометрів, пропорційні проекціям вектора уявного прискорення a XH,a YH,a ZH , надходять через блок 3 контролю справності вимірювачів проекцій вектора уявного прискорення та блок 4 контролю справності вимірювачів проекцій абсолютної кутової швидкості в обчислювач 8 початкових даних і через коректор 5 кутової швидкості і коректор 6 уявного прискорення в блок 9 комплексування інформації, а також в обчислювач 7 навігаційних параметрів. У ОПД надходять також сигнали, пропорційні широті c , висоті hc і довготі c транспортного засобу з блока 11 обчислення місця знаходження користувача приймача супутникової інформації, а також сигнали помилок вимірювань проекцій кутової швидкості X, Y , Z із БКІ для їх запам'ятовування в енергонезалежній пам'яті блока. У початковий момент часу ці сигнали відсутні. У ОПД здійснюється підготовка початкових даних для БКІ і ОНП. Сигнали 0, h0, 0 , пропорційні значенням широти, висоти і довготи місця розташування транспортного засобу, утворюються осередненням однойменних супутникових сигналів на інтервалі часу накопичення даних. Сигнали 0 , 0 , 0 , відповідно пропорційні початковим значенням кутів курсу, тангажу та крену транспор 7 63186 тного засобу, визначаються за допомогою осереднених на інтервалі часу накопичення даних проекцій вектора уявного прискорення та проекцій абсолютної кутової швидкості. Облік помилок вимірювань кутової швидкості, збережених в енергонезалежній пам'яті в результаті попереднього включення відмовостійкого інерціальносупутникового автоматизованого навігаційного комплексу, дозволяє підвищити точність гірокомпасування в поточному включенні і відповідно точність функціонування всієї системи. У БКСВПВУП і БКСВПАКШ здійснюється контроль справності кварцових акселерометрів і волоконно-оптичних гіроскопів шляхом порівняння сигналу з кварцового акселерометра чи волоконнооптичного гіроскопа, що лежать на осі R, з сигналами інших приладів за наступними формулами: XH 3 R Y Z ; YH 3 R X Z ; ZH 3 R X Y ; a XH 3 aR a Y a Z ; (1) a YH 3 aR a X a Z ; a ZH 3 aR a X a Y ; Несправним вважається ще той кварцовий акселерометр чи волоконно-оптичний гіроскоп, сигнал з якого відсутній, занадто великий чи протягом визначеного інтервалу часу не змінюється. У разі несправності кварцового акселерометра чи волоконно-оптичного гіроскопа в блоках формується сигнал несправності акселерометра Na/i=l (i=1, 2, 3, 4) чи сигнал несправності гіроскопа Ng/i=l (і=1, 2, 3, 4). Сигнали Na/HO та Ng/i=0 означають, що всі акселерометри та гіроскопи справні. У ККШ здійснюється облік помилок вимірювань кутової швидкості обертання шляхом підсумовування сигналів, що прийшли з БКСВАКШ, з сигналами, пропорційними помилкам гіроскопів, оцінюваним в БКІ. У КУП здійснюється облік помилок вимірювань уявного прискорення шляхом підсумовування сигналів, що прийшли з БКСВПВУП, з сигналами, пропорційними помилкам акселерометрів, оцінюваним в БКІ. У ОНП за сигналами, що йдуть від коректорів кутової швидкості і уявного прискорення, з урахуванням початкових даних, що надійшли з ОПД, здійснюється оперативне обчислення навігаційних параметрів: кутів орієнтації транспортного засобу відносно географічного меридіана і площини місцевого горизонту , ; північної vN , вертикальної vh та східної vE складових відносної швидкості поступального руху транспортного засобу, а також його географічних координат , h, . Зазначені параметри у вигляді відповідних сигналів видаються до блока 10 цифрових дисплеїв та зовнішніх систем. Усі обчислення, пов'язані з обробкою сигналів, що надходять з блоків 5,6, здійснюються для змінних, що характеризують стан об'єкта у географічній системі координат. 8 Прийняті антеною 19 сигнали від навігаційних супутників через підсилювач 18 поступають на багатоканальний радіоприймач 17, який після їх обробки видає інформацію про супутники в обчислювач 16 місця розташування супутників. Обчислювач 16 по даних про орбіти супутників, що видаються блоком 15 інформації з радіоприймача 17 і по сигналу таймера 14, обчислює розташування супутників, із сукупності яких потім буде обрана група, що забезпечує найкращу точність навігаційного рішення. Це здійснюється в блоці 12 вибору робочого сузір'я супутників, на входи якого, крім супутникової інформації з блока 13, надходять з блока 9 сигнали , h, , пропорційні географічним координатам транспортного засобу, отриманим на основі інерційних даних і відповідним їх апріорній оцінці у фільтрі Калмана на момент приходу супутникових сигналів. З урахуванням цих сигналів у блоці 12 здійснюється раціональний вибір робочого сузір'я супутників при кількості радіовидимості супутників, більшому 4, підвищує достовірність і точність наступних навігаційних рішень. Далі інформація про супутники, включені в робоче сузір'я, надходить у блок 11 обчислення місцезнаходження користувача, в якому виробляються сигнали, пропорційні координатам транспортного засобу c , hc , c і його швидкості vn, vh, ve . Всі зазначені сигнали надходять в БКІ для корекції навігаційних параметрів. Крім того, сигнали c , hc , c надходять у ОПД для початкової виставки транспортного засобу при включенні системи. Комплексування інерціальної і супутникової інформації здійснюється у блоці 9 комплексування інформації, на вхід якого надходять сигнали скоригованої кутової швидкості обертання з коректора 5 кутової швидкості, скоригованого уявного прискорення з коректора 6 уявного прискорення, а також сигнали з блока 11 приймача супутникової інформації про місцезнаходження і швидкість транспортного засобу і сигнал секундної мітки від таймера 14 для синхронізації інерціальної і супутникової інформації. Після включення системи в блок 9 комплексування інформації одноразово надходять також сигнали з ОПД про місцезнаходження літака 0, h0, 0 , орієнтації літака 0 , 0 , 0 та помилки гіроскопів X0, Y0, Z0 . Вихідні сигнали блока формуються відповідно до алгоритму узагальненого фільтра Калмана і включають в себе сигнали, пропорційні помилкам вимірювань гіроскопів X, Y , Z , що надходять в коректор 5 для корекції поточних вимірювань кутової швидкості та в обчислювач 8 для збереження в незалежній пам'яті, і помилок вимірювань акселерометрів a X, a Y , aZ , що надходять в коректор 6 для корекції поточних вимірювань уявного прискорення. Крім того на виході БКІ формуються не скоре говані від супутникової інформації сигнали , h, , які надходять у блок 12 для оптимізації вибору робочого сузір'я супутників. 9 Таким чином завдяки розширенню складу вихідних сигналів системи та додатковим алгоритмам контролю справності ми забезпечуємо підвищення надійності інерціальної частини системи, а відповідно і всієї системи цілком відносно до її 63186 10 використання в системах орієнтації та навігації транспортних засобів. Завдяки введенню до складу системи додаткових кварцових акселерометра та волоконно-оптичного гіроскопа. 11 63186 12 13 Комп’ютерна верстка Л. Ціхановська 63186 Підписне 14 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFault-tolerant inertial-satellite automated navigation complex
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Stepanov Fedir Volodymyrovych
Назва патенту російськоюОтказоустойчивый инерциально-супутниковый автоматизированный навигационный комплекс
Автори російськоюКулик Анатолий Степанович, Дергачев Константин Юрьевич, Степанов Федор Владимирович
МПК / Мітки
МПК: G01C 23/00
Мітки: відмовостійкий, комплекс, навігаційний, інерціально-супутниковий, автоматизований
Код посилання
<a href="https://ua.patents.su/7-63186-vidmovostijjkijj-inercialno-suputnikovijj-avtomatizovanijj-navigacijjnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс</a>
Автоматизований комплекс прийняття рішень щодо розробки перспективних зразків озброєння та військової техніки
Номер патенту: 46326
Опубліковано: 10.12.2009
Автори: Нор Петро Іванович, Крикуненко Олександр Анатолійович, Єфіменко Вячеслав Авраамович, Комаров Володимир Олександрович, Василенко Олександр Васильович
МПК: G06F 17/50
Мітки: автоматизований, озброєння, зразків, комплекс, перспективних, військової, рішень, розробки, техніки, прийняття
Формула / Реферат:
Автоматизований комплекс прийняття рішень щодо розробки перспективних зразків озброєння та військової техніки, який містить систему задання пріоритетних вихідних даних, блок отримання, обробки і видачі пріоритетної інформації, систему задання вихідних даних з озброєння та військової техніки, блок аналізу та формування додаткової інформації, систему збору, обробки та аналізу інформації і систему формування керівної інформації, при цьому...
Автоматизований вимірювальний комплекс для радіомоніторингу електромагнітного поля
Номер патенту: 73443
Опубліковано: 15.07.2005
Автори: Ільницький Людвіг Якович, Фецун Андрій Володимирович, Щербина Ольга Алімівна, Звєрєв Володимир Павлович
МПК: G01R 29/08, G01R 29/10
Мітки: комплекс, автоматизований, вимірювальний, радіомоніторингу, електромагнітного, поля
Формула / Реферат:
1. Автоматизований вимірювальний комплекс для радіомоніторингу електромагнітного поля, що містить вимірювальну антену та генератор сигналів, який відрізняється тим, що вимірювальна антена складається з чотирьох лінійних вібраторів антенної решітки, розміщених перпендикулярно один до одного, виходи чотирьох лінійних вібраторів антенної решітки підключені відповідно до перших входів чотирьох перемикачів режимів роботи, на другі входи яких...
Автоматизований вимірювальний комплекс для дослідження електромагнітного поля
Номер патенту: 81697
Опубліковано: 25.01.2008
Автори: Осама Тураби Абдалла Ейса, Сібрук Леонід Вікторович, Ільницький Людвіг Якович
МПК: G01R 29/08, G01R 29/00
Мітки: комплекс, вимірювальний, електромагнітного, дослідження, автоматизований, поля
Формула / Реферат:
Автоматизований вимірювальний комплекс для дослідження електромагнітного поля, що містить вимірювальну антену, який відрізняється тим, що вимірювальна антена складена з двох елементів лінійної поляризації, перший та другий виходи яких підключені відповідно до входів першого конвертора частоти, а третій та четвертий виходи двох елементів лінійної поляризації підключені до другого конвертора частоти, вихід від генератора конверторів...
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту
Номер патенту: 49923
Опубліковано: 11.05.2010
Автор: Сендецький Микола Миколайович
МПК: G06F 5/00, G05B 15/00, G06F 7/00
Мітки: технічних, комплекс, систем, складних, проектування, засобів, транспорту, залізничного, автоматизований
Формула / Реферат:
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту, що містить командний блок постановки завдань і керування процесом формування об'єкта, систему обґрунтування рівня якості створюваного об'єкта, систему формування виду перспективного складного об'єкта, центральну систему введення даних, підсистему вибору оптимального варіанта техніко-економічних вимог та тактико-технічних вимог і...
Автоматизований комплекс для складання деталей верху взуття
Номер патенту: 16988
Опубліковано: 15.09.2006
Автори: Горященко Сергій Леонідович, Драпак Георгій Мефодійович
МПК: A43D 111/00
Мітки: верху, деталей, складання, комплекс, взуття, автоматизований
Формула / Реферат:
Автоматизований комплекс для складання деталей верху взуття, що містить накопичувачі, завантажувальні пристрої з захватами та силовими двигунами, який відрізняється тим, що він оснащений автоматизованою швейною машиною, накопичувачами з покроковою подачею двох частин взуття, двома супутниками, верхній з яких закріплений в механізмі переміщення деталей під автоматизованою швейною машиною, а нижній розташований на складальній позиції між...
Попередній патент: Пристрій для тривалих статичних випробувань плитних меблевих деталей та їх з’єднань
Наступний патент: Генератор гідроакустичних імпульсів
Випадковий патент: Спосіб діагностики порушень ліпідного обміну у хворих на ішемічну хворобу серця на тлі цукрового діабету 2 типу за рівнем сортиліну