Система для вимірювання переміщень в елементі інженерних конструкції і споруд під дією навантажень
Номер патенту: 70477
Опубліковано: 11.06.2012
Автори: Вітольберг Володимир Геннадійович, Даренський Олександр Миколайович, Бєліков Едуард Анатолійович, Бугаєць Наталія Володимирівна, Астахов Віктор Миколайович


Формула / Реферат
1. Система для вимірювання переміщень елементів інженерних конструкцій і споруд під дією навантажень, що містить інформаційний датчик, який закріплюється на елементі, яка відрізняється тим, що інформаційний датчик виготовлений у вигляді круга чорного кольору на білому матеріалі, що не намагнічується, діаметром 4-8 мм, а на відстані від 4 до 8 м від елемента, що діагностується, занурюють у ґрунт стійки, закріплюють до стійок платформу, забезпечують її віброзахист і кріплення з можливістю плавного регулювання висоти відносно ґрунту за допомогою взаємодії стійок і пружних амортизаторів, стабілізують її положення у вертикальній і горизонтальній повздовжній площинах за допомогою гіроскопа, монтують на неї джерело світла для компенсації можливої зміни освітленості інформаційного датчика та лазер зі сферичним джерелом випромінювання для формування лазерної плями на інформаційному датчику на цифрову відеокамеру, під'єднану до комп'ютера дротами, при цьому відеокамеру установлюють на гумову губчасту підкладку і закріплюють резино-металевим кріпленням та після цього фіксують напрям променів лазера, джерела світла і об'єктив відеокамери на круг інформаційного датчика для нульового відліку переміщень.
2. Система за п. 1, яка відрізняється тим, що цифровий відеопотік від відеокамери, що захоплюється за допомогою драйвера, записують на жорсткий диск, виконують аналіз для кожного фрейму відеопотоку, будують бітову матрицю відображення, за допомогою цифрових фільтрів виділяють відображення інформаційного датчика і лазерної плями, після цього з матриці відображень будують матрицю позицій, кожна крапка якої визначена або як фон, або як інформаційний датчик, або як лазерна пляма, потім визначають координати лазерної плями, інформаційного датчика та розміри інформаційного датчика і перераховують координати матриці в абсолютні одиниці їх переміщень відносно зафіксованої нульової крапки, інформацію про поточне зміщення інформаційного датчика та лазерної плями у вигляді графіків виводять на дисплей комп'ютера.
Текст
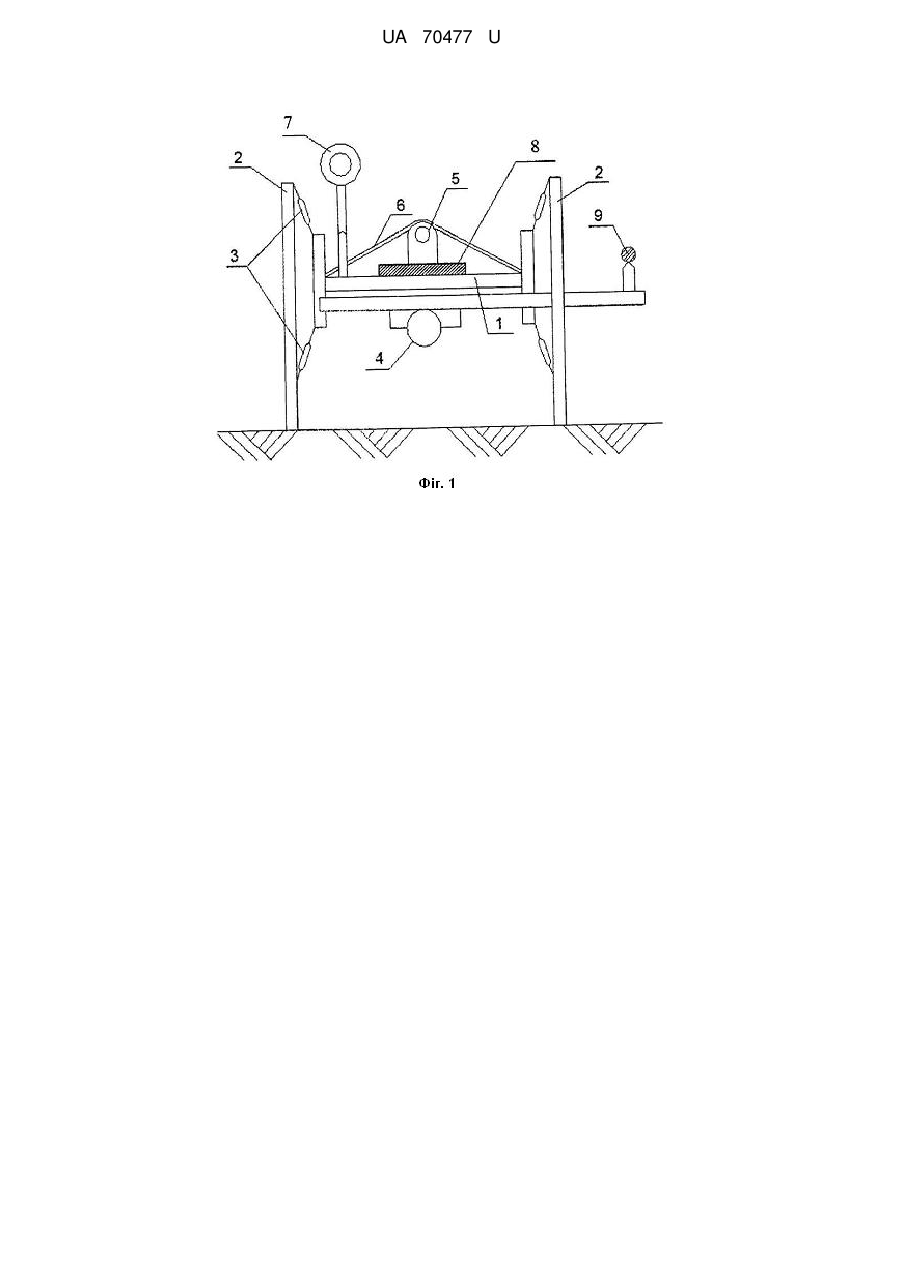
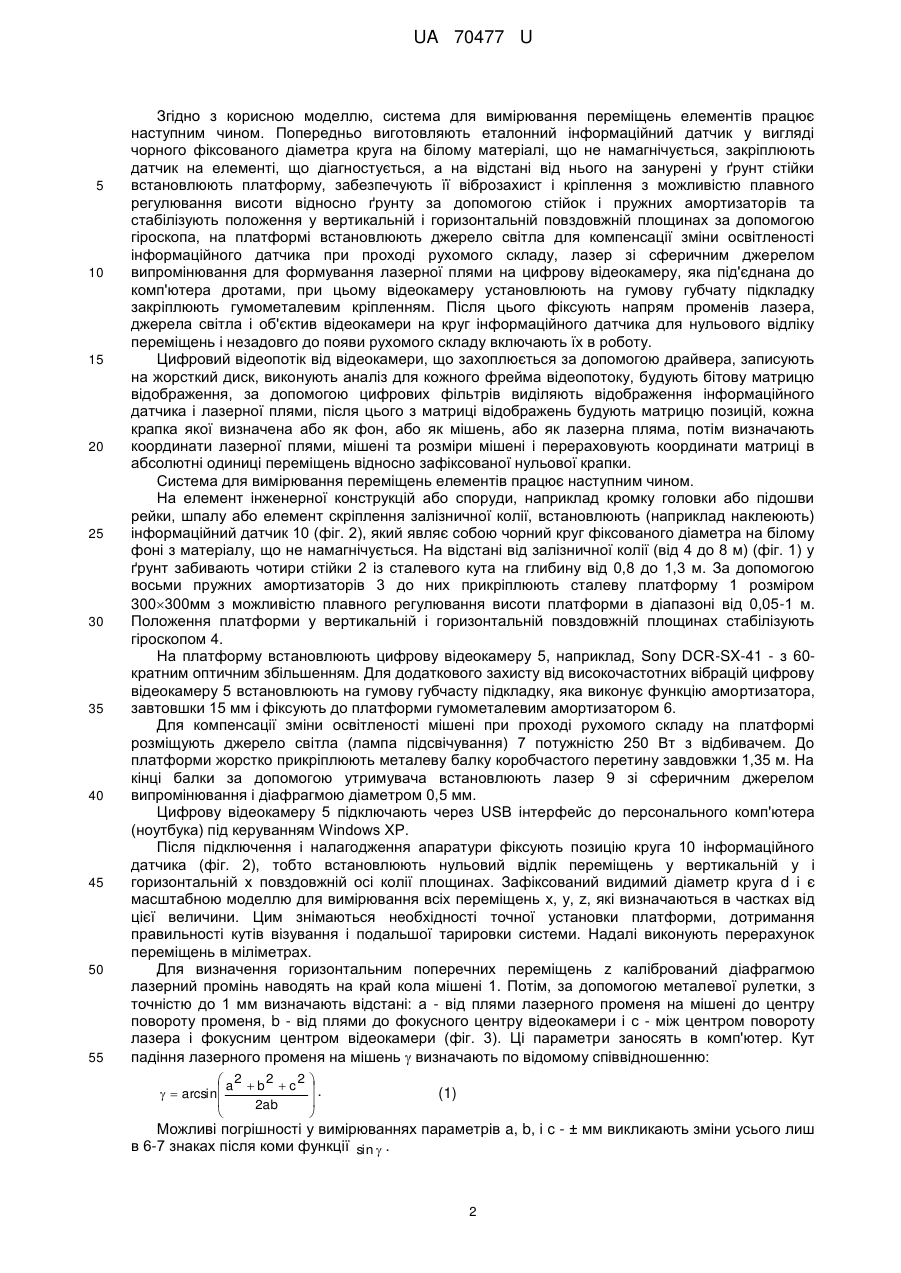
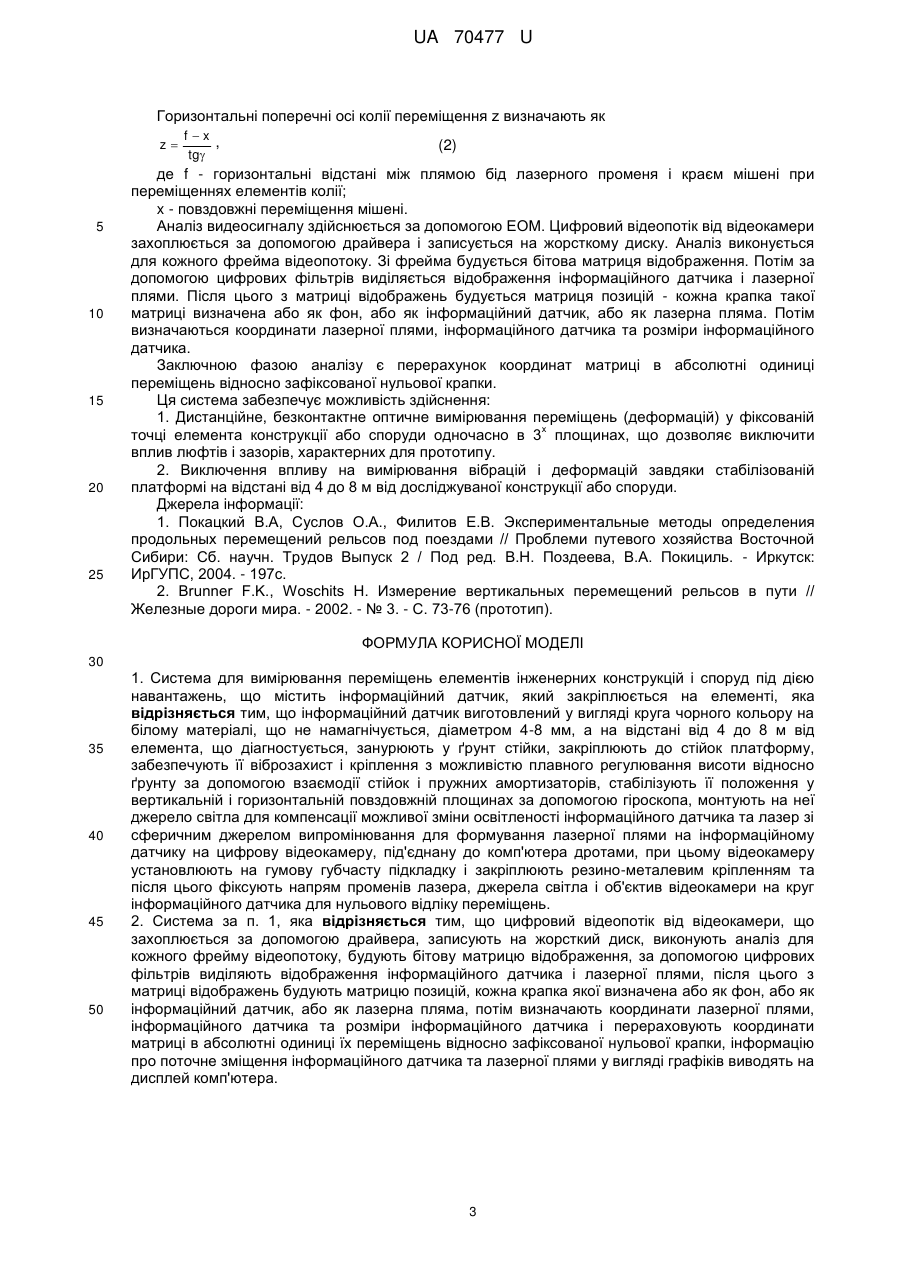
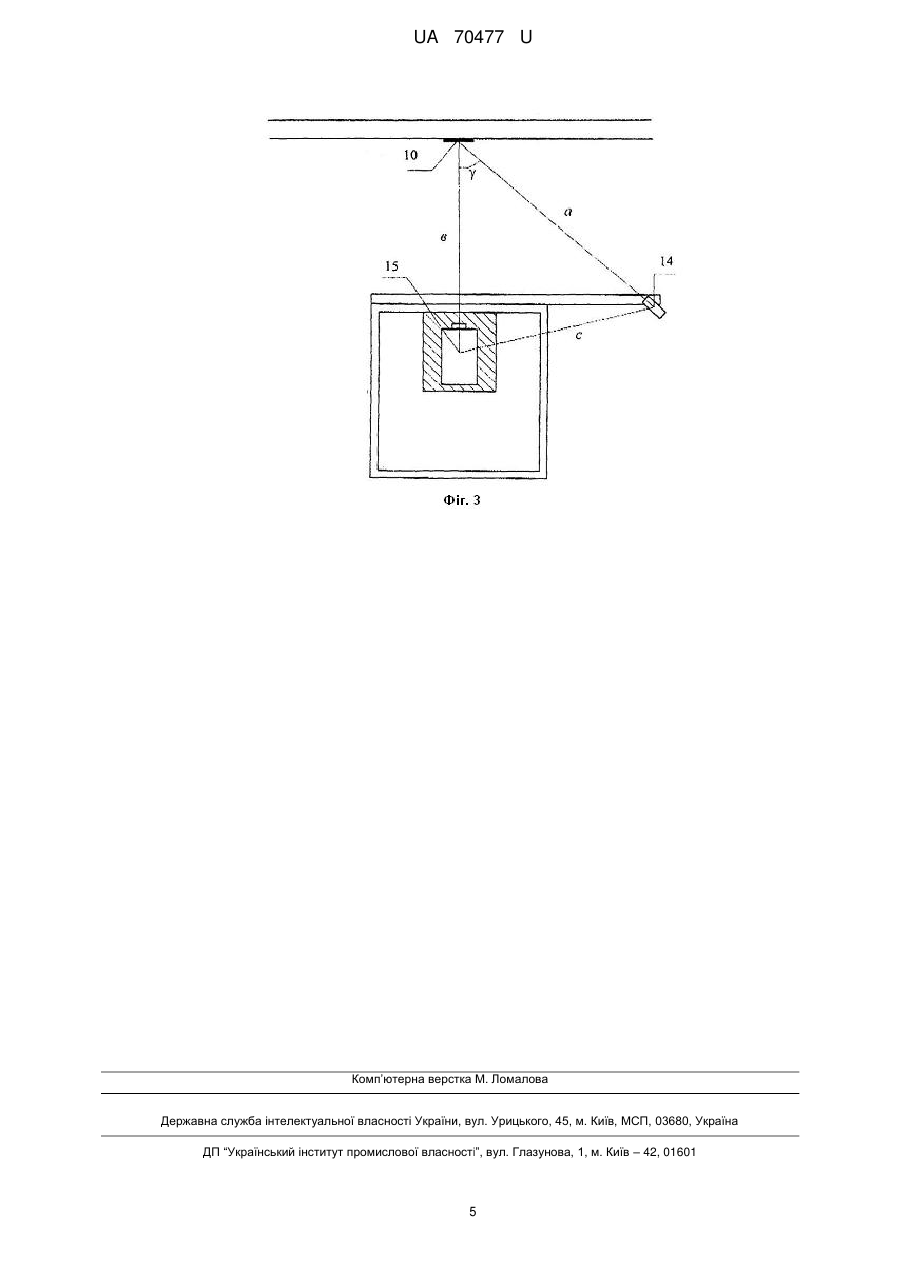
Реферат: Система для вимірювання переміщень елементів інженерних конструкцій і споруд під дією навантажень, містить інформаційний датчик, який закріплюється на елементі, і виготовлений у вигляді круга чорного кольору на білому матеріалі, що не намагнічується, діаметром 4-8 мм. На відстані від 4 до 8 м від елемента, що діагностується, занурюють у ґрунт стійки, закріплюють до стійок платформу, забезпечують її віброзахист і кріплення з можливістю плавного регулювання висоти відносно ґрунту за допомогою взаємодії стійок і пружних амортизаторів. Далі стабілізують її положення у вертикальній і горизонтальній повздовжній площинах за допомогою гіроскопа, монтують на неї джерело світла для компенсації можливої зміни освітленості інформаційного датчика та лазер зі сферичним джерелом випромінювання для формування лазерної плями на інформаційному датчику на цифрову відеокамеру, під'єднану до комп'ютера дротами. При цьому відеокамеру установлюють на гумову губчасту підкладку і закріплюють резино-металевим кріпленням та після цього фіксують напрям променів лазера, джерела світла і об'єктив відеокамери на круг інформаційного датчика для нульового відліку переміщень. UA 70477 U (12) UA 70477 U UA 70477 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пристроїв діагностування інженерних конструкцій і споруд, зокрема до системи для вимірювання деформованого стану елементів залізничної колії під впливом навантажень від рухомого складу. Діагностика переміщень елементів інженерних споруд і конструкцій має деякі вимоги до систем вимірювання, у тому числі: точність вимірювань, яка має не перевищувати 0,1 мм; мала тривалість циклу вимірювань; відсутність впливу коливань і вібрацій на результати вимірювань; добра електромагнітна сумісність у зонах утворювання сильних електромагнітних полів. Відомий спосіб [1] вимірювання переміщень елементів таких інженерних конструкцій, як залізничні колії, який здійснюється за допомогою пристрою, що використовує інформацію з датчиків у вигляді електротензометричних електропрогибомірів, які являють собою гнучку металеву пластину з наклеєними тензорезисторами. Прогибомір закріплюється на свайці, яку забивають у баласт. Інформація про переміщення елементів колії за допомогою механічних пристроїв передається на пластину прогибоміру, при вигині якої змінюються електричні опори тензорезисторів. Зміна електричного сигналу за допомогою аналогових, а останнім часом аналого-цифрових перетворювачів, фіксується реєструючими приладами (світлопроменевими осцилографами або комп'ютерами) [1]. Недоліком цього пристрою є недосконалість механічної системи передачі переміщень на пластину прогибомірів, тому що люфти і зазори, власні коливання пластини викликають систематичні погрішності. Амплітудні значення коливань баласту і верхньої частини земляного полотна, в яку забивається свайка, що є базою вимірювань, порівнянні, а в деяких випадках і перевищують вимірювані переміщення. Оскільки коливання ґрунту земляного полотна експоненціально знижуються у міру віддалення під колії, є потреба діагностуючі прилади і датчики рознести на відстані від 1 до 20 м. Найбільш близьким за сукупністю ознак до корисної моделі, що заявляється, є пристрій для вимірювання оптичним способом деформацій [2], який складається з використання дії двох рознесених в просторі компонентів - лазера і інформаційного датчика. Промінь, який служить базою для вимірювань тільки вертикальних прогинань рейки, генерується лазером і фокусується теодолітом на робочій площині датчика. Теодоліт встановлюється на відстані від 1 до 20м. Інформаційний датчик, що складається з діода з боковим ефектом і підсилювача сигналів, закріплюється на шийці рейки. Створений діодом сигнал після посилення і аналого-цифрового перетворення виводиться на дисплей комп'ютера. Недоліком цього пристрою є те, що він дозволяє визначити переміщення тільки в одній площині - вертикальній. Крім того, інформаційний датчик встановлюється безпосередньо на рейку, що викликає необхідність дій по захисту від електромагнітних полів і необхідність обліку вібрацій самого інформаційного датчика (фільтр, який розділяє корисний сигнал і шумовий фон) [2]. В основу корисної моделі поставлено задачу забезпечити отримання найбільш точної інформації про технічний стан елементів інженерної конструкції, споруди шляхом створення системи для дистанційного безконтактного оптичного вимірювання переміщень (деформацій) при статичних та динамічних навантаженнях у фіксованій точці у повздовжній, поперечній та вертикальній площинах одночасно, та виключити вплив на вимірювання вібрацій і деформацій завдяки стабілізованій платформі на відстані. Поставлена задача вирішується тим, що система для вимірювання переміщень елементів інженерних конструкцій і споруд (наприклад рейкової колії) під дією навантажень від рухомого складу складається з: 1. інформаційного датчика для зняття інформації про переміщення, який закріплюється на елементі, що діагностується та розміщується на довільній відстані від колії; 2. платформи з розташованими на ній пристроями; 3. комп'ютера, який з'єднаний дротами з відеокамерою, розташованою на платформі. На фіг. 1 зображено загальний вид платформи з розташованими на ній пристроями, а саме: платформа 1, стійки 2, пружні амортизатори 3, гіроскоп 4, відеокамера 5, кріплення відеокамери 6, джерело світла 7, гумова підкладка під відеокамеру 8, лазер 9. На фіг. 2 представлено зображення результатів вимірювання переміщень кромки головки рейки на дисплеї комп'ютера, а саме: інформаційний датчик 10 з діаметром d=4-8 мм; лазерна пляма 11; поточні (значення переміщень 12; графіки переміщень в функції часу 13. На фіг. 3 представлено схему для визначення кута падіння лазерного променя, яка містить інформаційний датчик 10; центр повороту лазеру 14; фокусний центр відеокамери 15. 1 UA 70477 U 5 10 15 20 25 30 35 40 45 50 55 Згідно з корисною моделлю, система для вимірювання переміщень елементів працює наступним чином. Попередньо виготовляють еталонний інформаційний датчик у вигляді чорного фіксованого діаметра круга на білому матеріалі, що не намагнічується, закріплюють датчик на елементі, що діагностується, а на відстані від нього на занурені у ґрунт стійки встановлюють платформу, забезпечують її віброзахист і кріплення з можливістю плавного регулювання висоти відносно ґрунту за допомогою стійок і пружних амортизаторів та стабілізують положення у вертикальній і горизонтальній повздовжній площинах за допомогою гіроскопа, на платформі встановлюють джерело світла для компенсації зміни освітленості інформаційного датчика при проході рухомого складу, лазер зі сферичним джерелом випромінювання для формування лазерної плями на цифрову відеокамеру, яка під'єднана до комп'ютера дротами, при цьому відеокамеру установлюють на гумову губчату підкладку закріплюють гумометалевим кріпленням. Після цього фіксують напрям променів лазера, джерела світла і об'єктив відеокамери на круг інформаційного датчика для нульового відліку переміщень і незадовго до появи рухомого складу включають їх в роботу. Цифровий відеопотік від відеокамери, що захоплюється за допомогою драйвера, записують на жорсткий диск, виконують аналіз для кожного фрейма відеопотоку, будують бітову матрицю відображення, за допомогою цифрових фільтрів виділяють відображення інформаційного датчика і лазерної плями, після цього з матриці відображень будують матрицю позицій, кожна крапка якої визначена або як фон, або як мішень, або як лазерна пляма, потім визначають координати лазерної плями, мішені та розміри мішені і перераховують координати матриці в абсолютні одиниці переміщень відносно зафіксованої нульової крапки. Система для вимірювання переміщень елементів працює наступним чином. На елемент інженерної конструкцій або споруди, наприклад кромку головки або підошви рейки, шпалу або елемент скріплення залізничної колії, встановлюють (наприклад наклеюють) інформаційний датчик 10 (фіг. 2), який являє собою чорний круг фіксованого діаметра на білому фоні з матеріалу, що не намагнічується. На відстані від залізничної колії (від 4 до 8 м) (фіг. 1) у ґрунт забивають чотири стійки 2 із сталевого кута на глибину від 0,8 до 1,3 м. За допомогою восьми пружних амортизаторів 3 до них прикріплюють сталеву платформу 1 розміром 300300мм з можливістю плавного регулювання висоти платформи в діапазоні від 0,05-1 м. Положення платформи у вертикальній і горизонтальній повздовжній площинах стабілізують гіроскопом 4. На платформу встановлюють цифрову відеокамеру 5, наприклад, Sony DCR-SX-41 - з 60кратним оптичним збільшенням. Для додаткового захисту від високочастотних вібрацій цифрову відеокамеру 5 встановлюють на гумову губчасту підкладку, яка виконує функцію амортизатора, завтовшки 15 мм і фіксують до платформи гумометалевим амортизатором 6. Для компенсації зміни освітленості мішені при проході рухомого складу на платформі розміщують джерело світла (лампа підсвічування) 7 потужністю 250 Вт з відбивачем. До платформи жорстко прикріплюють металеву балку коробчастого перетину завдовжки 1,35 м. На кінці балки за допомогою утримувача встановлюють лазер 9 зі сферичним джерелом випромінювання і діафрагмою діаметром 0,5 мм. Цифрову відеокамеру 5 підключають через USB інтерфейс до персонального комп'ютера (ноутбука) під керуванням Windows XP. Після підключення і налагодження апаратури фіксують позицію круга 10 інформаційного датчика (фіг. 2), тобто встановлюють нульовий відлік переміщень у вертикальній у і горизонтальній x повздовжній осі колії площинах. Зафіксований видимий діаметр круга d і є масштабною моделлю для вимірювання всіх переміщень х, у, z, які визначаються в частках від цієї величини. Цим знімаються необхідності точної установки платформи, дотримання правильності кутів візування і подальшої тарировки системи. Надалі виконують перерахунок переміщень в міліметрах. Для визначення горизонтальним поперечних переміщень z калібрований діафрагмою лазерний промінь наводять на край кола мішені 1. Потім, за допомогою металевої рулетки, з точністю до 1 мм визначають відстані: а - від плями лазерного променя на мішені до центру повороту променя, b - від плями до фокусного центру відеокамери і с - між центром повороту лазера і фокусним центром відеокамери (фіг. 3). Ці параметри заносять в комп'ютер. Кут падіння лазерного променя на мішень визначають по відомому співвідношенню: a2 b2 c 2 arcsin 2ab . (1) Можливі погрішності у вимірюваннях параметрів a, b, і c - ± мм викликають зміни усього лиш в 6-7 знаках після коми функції sin . 2 UA 70477 U Горизонтальні поперечні осі колії переміщення z визначають як z 5 10 15 20 25 fx , tg (2) де f - горизонтальні відстані між плямою бід лазерного променя і краєм мішені при переміщеннях елементів колії; x - повздовжні переміщення мішені. Аналіз видеосигналу здійснюється за допомогою ЕОМ. Цифровий відеопотік від відеокамери захоплюється за допомогою драйвера і записується на жорсткому диску. Аналіз виконується для кожного фрейма відеопотоку. Зі фрейма будується бітова матриця відображення. Потім за допомогою цифрових фільтрів виділяється відображення інформаційного датчика і лазерної плями. Після цього з матриці відображень будується матриця позицій - кожна крапка такої матриці визначена або як фон, або як інформаційний датчик, або як лазерна пляма. Потім визначаються координати лазерної плями, інформаційного датчика та розміри інформаційного датчика. Заключною фазою аналізу є перерахунок координат матриці в абсолютні одиниці переміщень відносно зафіксованої нульової крапки. Ця система забезпечує можливість здійснення: 1. Дистанційне, безконтактне оптичне вимірювання переміщень (деформацій) у фіксованій х точці елемента конструкції або споруди одночасно в 3 площинах, що дозволяє виключити вплив люфтів і зазорів, характерних для прототипу. 2. Виключення впливу на вимірювання вібрацій і деформацій завдяки стабілізованій платформі на відстані від 4 до 8 м від досліджуваної конструкції або споруди. Джерела інформації: 1. Покацкий В.А, Суслов О.А., Филитов Е.В. Экспериментальные методы определения продольных перемещений рельсов под поездами // Проблеми путевого хозяйства Восточной Сибири: Сб. научн. Трудов Выпуск 2 / Под ред. В.Н. Поздеева, В.А. Покициль. - Иркутск: ИрГУПС, 2004. - 197с. 2. Brunner F.K., Woschits H. Измерение вертикальных перемещений рельсов в пути // Железные дороги мира. - 2002. - № 3. - С. 73-76 (прототип). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 50 1. Система для вимірювання переміщень елементів інженерних конструкцій і споруд під дією навантажень, що містить інформаційний датчик, який закріплюється на елементі, яка відрізняється тим, що інформаційний датчик виготовлений у вигляді круга чорного кольору на білому матеріалі, що не намагнічується, діаметром 4-8 мм, а на відстані від 4 до 8 м від елемента, що діагностується, занурюють у ґрунт стійки, закріплюють до стійок платформу, забезпечують її віброзахист і кріплення з можливістю плавного регулювання висоти відносно ґрунту за допомогою взаємодії стійок і пружних амортизаторів, стабілізують її положення у вертикальній і горизонтальній повздовжній площинах за допомогою гіроскопа, монтують на неї джерело світла для компенсації можливої зміни освітленості інформаційного датчика та лазер зі сферичним джерелом випромінювання для формування лазерної плями на інформаційному датчику на цифрову відеокамеру, під'єднану до комп'ютера дротами, при цьому відеокамеру установлюють на гумову губчасту підкладку і закріплюють резино-металевим кріпленням та після цього фіксують напрям променів лазера, джерела світла і об'єктив відеокамери на круг інформаційного датчика для нульового відліку переміщень. 2. Система за п. 1, яка відрізняється тим, що цифровий відеопотік від відеокамери, що захоплюється за допомогою драйвера, записують на жорсткий диск, виконують аналіз для кожного фрейму відеопотоку, будують бітову матрицю відображення, за допомогою цифрових фільтрів виділяють відображення інформаційного датчика і лазерної плями, після цього з матриці відображень будують матрицю позицій, кожна крапка якої визначена або як фон, або як інформаційний датчик, або як лазерна пляма, потім визначають координати лазерної плями, інформаційного датчика та розміри інформаційного датчика і перераховують координати матриці в абсолютні одиниці їх переміщень відносно зафіксованої нульової крапки, інформацію про поточне зміщення інформаційного датчика та лазерної плями у вигляді графіків виводять на дисплей комп'ютера. 3 UA 70477 U 4 UA 70477 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for measuring displacement of element of engineering constructions and buildings under the load
Автори англійськоюDarenskyi Oleksandr Mykolaiovych, Astakhov Viktor Mykolaiovych, Vitolberg Volodymyr Hennadiiovych, Buhaiets Natalia Volodymyrivna, Bielikov Eduard Anatoliiovych
Назва патенту російськоюСистема для измерений перемещений в элементе инженерных конструкций и сооружений под действием нагрузок
Автори російськоюДаренский Александр Николаевич, Астахов Виктор Николаевич, Витольберг Владимир Геннадьевич, Бугаец Наталия Владимировна, Беликов Эдуард Анатольевич
МПК / Мітки
МПК: G05D 5/00, E01B 35/00
Мітки: переміщень, елементи, інженерних, вимірювання, система, дією, навантажень, конструкції, споруд
Код посилання
<a href="https://ua.patents.su/7-70477-sistema-dlya-vimiryuvannya-peremishhen-v-elementi-inzhenernikh-konstrukci-i-sporud-pid-diehyu-navantazhen.html" target="_blank" rel="follow" title="База патентів України">Система для вимірювання переміщень в елементі інженерних конструкції і споруд під дією навантажень</a>
Пристрій для вимірювання хвильових навантажень і тисків на моделі гідротехнічних споруд укісних типів
Номер патенту: 58557
Опубліковано: 11.04.2011
Автори: Рогачко Станіслав Іванович, Синиця Роман Валерійович
Мітки: споруд, тисків, гідротехнічних, пристрій, вимірювання, укісних, навантажень, хвильових, моделі, типів
Формула / Реферат:
1. Пристрій для вимірювання хвильових навантажень і тисків на моделі гідротехнічних споруд укісних типів, що містить установлену над дном гідрохвильового лотка модель гідротехнічної споруди, яка взаємодіє з силовими датчиками, який відрізняється тим, що він містить горизонтальну несучу раму, установлену на дні гідрохвильового лотка, вертикальну раму і похилу раму для кріплення досліджуваних моделей гідротехнічних споруд укісних типів, при...
Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд
Номер патенту: 75876
Опубліковано: 15.06.2006
Автори: Чаплигін Валерій Іванович, Шокарев Віктор Семенович, Мальцева Яна Валеріївна
МПК: G01N 27/90, G01M 19/00
Мітки: неруйнівного, система, контролю, вимірювально-інформаційна, інженерних, споруд, стану, електромагнітна, параметрів, конструкцій, напружено-деформованого
Формула / Реферат:
1. Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд, яка містить вимірювальні канали з електромагнітними датчиками, які складаються з первинного індуктивного перетворювача з рухомим циліндричним магнітопроводом, на якому розташовані по чотири ідентичних основних котушки індуктивності, ввімкнених випусками в основний комутатор котушок, з'єднаний...
Пристрій для вимірювання лінійних переміщень

Номер патенту: 16116
Опубліковано: 17.07.2006
Автори: Червоний Віталій Миколайович, Постнов Генадій Михайлович, Дуб Володимир Васильович, Чеканов Микола Анатолійович
МПК: G01B 9/00
Мітки: лінійних, пристрій, вимірювання, переміщень
Формула / Реферат:
Пристрій для вимірювання лінійних переміщень, що містить станину, прямокутну форму у вигляді паралелограма, дві рифлені плексигласові пластини, між якими закладається дослідний зразок, верхня пластина з одного боку навантажується за допомогою "вантажу", який відрізняється тим, що з іншого боку верхньої пластини приєднаний за допомогою гнучкої в'язки датчик лінійних переміщень, який з'єднано з аналого-цифровим перетворювачем.
Спосіб вимірювання кутових переміщень
Номер патенту: 61854
Опубліковано: 25.07.2011
Автори: Бурлєєв Олег Леонідович, Кошовий Микола Дмитрович
МПК: G01B 11/26
Мітки: переміщень, кутових, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання кутових переміщень, який полягає у тому, що для вимірювання використовують фотоелектричний перетворювач кутових переміщень, який відрізняється тим, що перетворювач розміщують на своїй, окремій від обертового об'єкта, осі обертання, на якій встановлюють бобіну з нерозтяжним дротом, вільний кінець якого жорстко з'єднують з поверхнею обертового об'єкта, дріт вертають в початкове положення завдяки використанню пружини.
Датчик переміщень
Номер патенту: 68526
Опубліковано: 26.03.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: переміщень, датчик
Формула / Реферат:
Датчик переміщень, що містить два постійні магніти, який відрізняється тим, що як датчик Холла застосовано ферозонд та два градієнтометри, розташовані у міжполюсному зазорі однойменних полюсів постійних магнітів, при цьому ферозонд розміщений в центрі міжполюсного зазору, градієнтометри - симетрично від нього на відстані, що дорівнює половині ширини полюсів постійних магнітів, а вихідні обмотки ферозонда та градієнтометрів з'єднані...
Попередній патент: Спосіб діагностики гемоперитонеума
Наступний патент: Спосіб отримання поліціанурату
Випадковий патент: Пристрій автоматичного керування в системі з пружним зв'язком