Пристрій автоматичного керування в системі з пружним зв’язком
Номер патенту: 30618
Опубліковано: 11.03.2008
Автори: Зачепа Юрій Володимирович, Коваль Наталія Василівна, Коваль Віталій Анатолійович, Сергієнко Сергій Анатолійович
Формула / Реферат
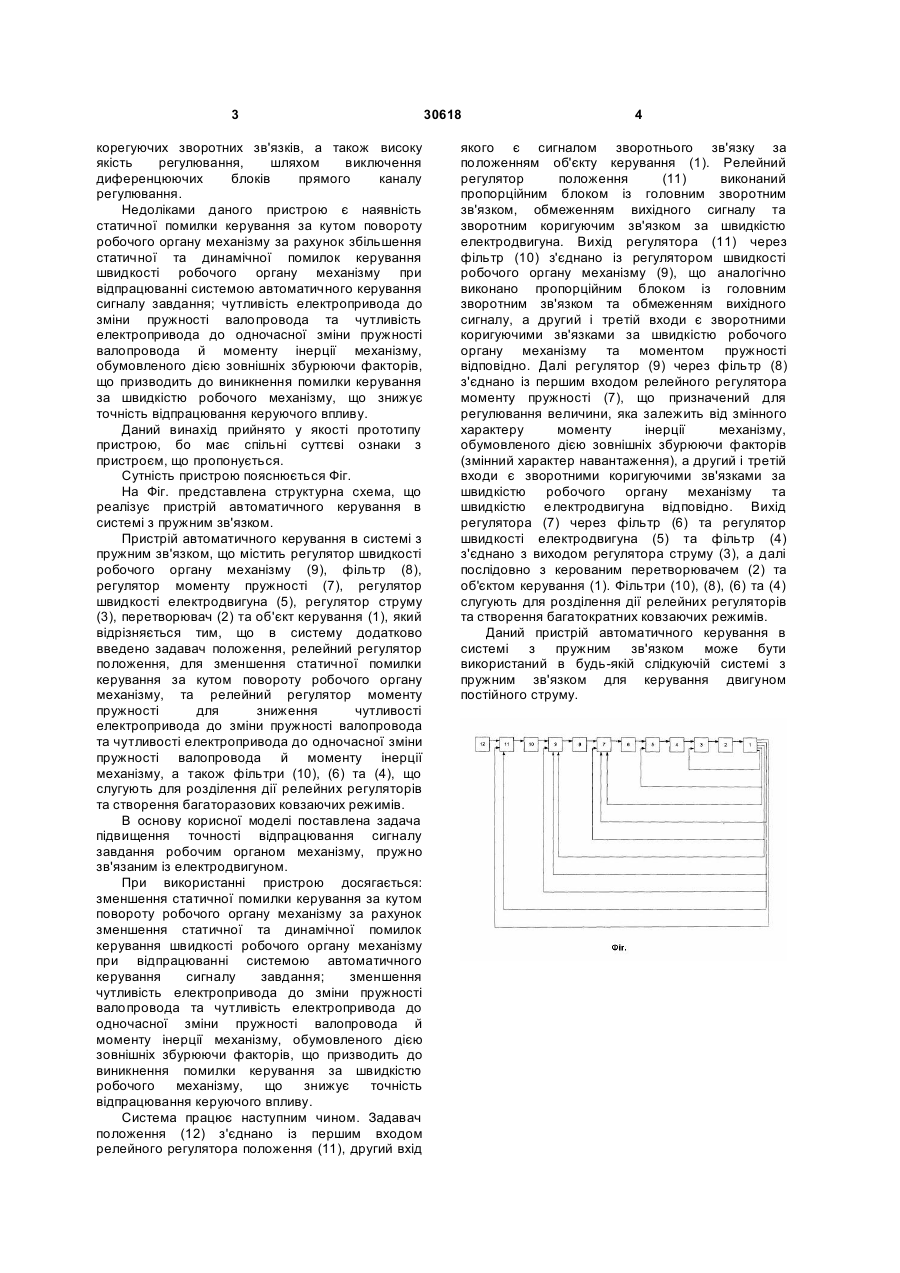
Пристрій автоматичного керування в системі з пружним зв'язком, що містить регулятор швидкості робочого органа механізму, вихід якого через фільтр з'єднано з регулятором моменту пружності, регулятор швидкості електродвигуна, вихід якого також через фільтр з'єднано з регулятором струму, перетворювач та об'єкт керування, який відрізняється тим, що в систему додатково введено задавач положення, який з'єднано із першим входом релейного регулятора положення, другий вхід якого є сигналом зворотного зв'язку за положенням об'єкта керування, релейний регулятор положення, вихід якого через фільтр з'єднано із регулятором швидкості робочого органа механізму, та релейний регулятор моменту пружності, вихід якого через фільтр, регулятор швидкості електродвигуна та фільтр з'єднано з виходом регулятора струму і далі послідовно з керованим перетворювачем та об'єктом керування, а також фільтри, що зв'язують регулятор положення з регулятором швидкості робочого органа, релейний регулятор моменту пружності з регулятором швидкості електродвигуна, регулятор швидкості електродвигуна з регулятором.
Текст
Пристрій автоматичного керування в системі з пружним зв'язком, що містить регулятор швидкості робочого органа механізму, вихід якого через фільтр з'єднано з регулятором моменту пружності, регулятор швидкості електродвигуна, вихід якого також через фільтр з'єднано з регулятором струм у, перетворювач та об'єкт керування, 3 корегуючих зворотних зв'язків, а також високу якість регулювання, шляхом виключення диференцюючих блоків прямого каналу регулювання. Недоліками даного пристрою є наявність статичної помилки керування за кутом повороту робочого органу механізму за рахунок збільшення статичної та динамічної помилок керування швидкості робочого органу механізму при відпрацюванні системою автоматичного керування сигналу завдання; чутливість електропривода до зміни пружності валопровода та чутливість електропривода до одночасної зміни пружності валопровода й моменту інерції механізму, обумовленого дією зовнішніх збурюючи факторів, що призводить до виникнення помилки керування за швидкістю робочого механізму, що знижує точність відпрацювання керуючого впливу. Даний винахід прийнято у якості прототипу пристрою, бо має спільні суттєві ознаки з пристроєм, що пропонується. Сутність пристрою пояснюється Фіг. На Фіг. представлена структурна схема, що реалізує пристрій автоматичного керування в системі з пружним зв'язком. Пристрій автоматичного керування в системі з пружним зв'язком, що містить регулятор швидкості робочого органу механізму (9), фільтр (8), регулятор моменту пружності (7), регулятор швидкості електродвигуна (5), регулятор струму (3), перетворювач (2) та об'єкт керування (1), який відрізняється тим, що в систему додатково введено задавач положення, релейний регулятор положення, для зменшення статичної помилки керування за кутом повороту робочого органу механізму, та релейний регулятор моменту пружності для зниження чутливості електропривода до зміни пружності валопровода та чутливості електропривода до одночасної зміни пружності валопровода й моменту інерції механізму, а також фільтри (10), (6) та (4), що слугують для розділення дії релейних регуляторів та створення багаторазових ковзаючих режимів. В основу корисної моделі поставлена задача підвищення точності відпрацювання сигналу завдання робочим органом механізму, пружно зв'язаним із електродвигуном. При використанні пристрою досягається: зменшення статичної помилки керування за кутом повороту робочого органу механізму за рахунок зменшення статичної та динамічної помилок керування швидкості робочого органу механізму при відпрацюванні системою автоматичного керування сигналу завдання; зменшення чутливість електропривода до зміни пружності валопровода та чутливість електропривода до одночасної зміни пружності валопровода й моменту інерції механізму, обумовленого дією зовнішніх збурюючи факторів, що призводить до виникнення помилки керування за швидкістю робочого механізму, що знижує точність відпрацювання керуючого впливу. Система працює наступним чином. Задавач положення (12) з'єднано із першим входом релейного регулятора положення (11), другий вхід 30618 4 якого є сигналом зворотнього зв'язку за положенням об'єкту керування (1). Релейний регулятор положення (11) виконаний пропорційним блоком із головним зворотним зв'язком, обмеженням вихідного сигналу та зворотним коригуючим зв'язком за швидкістю електродвигуна. Вихід регулятора (11) через фільтр (10) з'єднано із регулятором швидкості робочого органу механізму (9), що аналогічно виконано пропорційним блоком із головним зворотним зв'язком та обмеженням вихідного сигналу, а другий і третій входи є зворотними коригуючими зв'язками за швидкістю робочого органу механізму та моментом пружності відповідно. Далі регулятор (9) через фільтр (8) з'єднано із першим входом релейного регулятора моменту пружності (7), що призначений для регулювання величини, яка залежить від змінного характеру моменту інерції механізму, обумовленого дією зовнішніх збурюючи факторів (змінний характер навантаження), а другий і третій входи є зворотними коригуючими зв'язками за швидкістю робочого органу механізму та швидкістю електродвигуна відповідно. Вихід регулятора (7) через фільтр (6) та регулятор швидкості електродвигуна (5) та фільтр (4) з'єднано з виходом регулятора струму (3), а далі послідовно з керованим перетворювачем (2) та об'єктом керування (1). Фільтри (10), (8), (6) та (4) слугують для розділення дії релейних регуляторів та створення багатократних ковзаючих режимів. Даний пристрій автоматичного керування в системі з пружним зв'язком може бути використаний в будь-якій слідкуючій системі з пружним зв'язком для керування двигуном постійного струму.
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic control device in spring-loaded system
Автори англійськоюSerhiienko Serhii Anatoliiovych, Koval Natalia Vasylivna, Zachepa Yurii Volodymyrovych, Koval Vitalii Anatoliiovych
Назва патенту російськоюУстройство автоматического управления в системе с пружинной связью
Автори російськоюСергиенко Сергей Анатольевич, Коваль Наталья Васильвна, Зачепа Юрий Владимирович, Коваль Виталий Анатольевич
МПК / Мітки
МПК: H02B 5/00
Мітки: пристрій, системі, пружним, зв'язком, автоматичного, керування
Код посилання
<a href="https://ua.patents.su/2-30618-pristrijj-avtomatichnogo-keruvannya-v-sistemi-z-pruzhnim-zvyazkom.html" target="_blank" rel="follow" title="База патентів України">Пристрій автоматичного керування в системі з пружним зв’язком</a>
Пристрій автоматичного керування регулятором напруги
Номер патенту: 37686
Опубліковано: 15.05.2001
Автори: Фурман Ілля Олександрович, Савченко Петро Ілліч, Трунова Ірина Михайлівна, Ремез Віталій Віталійович
МПК: H02M 5/02
Мітки: пристрій, керування, напруги, автоматичного, регулятором
Текст:
...Сигнал Yij є і вхідним сигналом, що вводиться в мікроконтролер 6 для визначення відповідного заданого оптимального значення напруги живлення електрообладнання даного типового варіанту одночасної його експлуатації, тобто: Yij=Xij. В мікроконтролері 6 здійснюється порівняння значення напруги Uвх на вході регулятора напруги 1 з оптимальним значенням для даного типового варіанту одночасної експлуатації електрообладнання Uопт і з...
Спосіб корекції рівнів потужності множини передач у безпровідній системі зв’язку (варіанти), пристрій керування потужністю для використання у безпровідній системі зв’язку та пристрій керування потужністю у базо
Номер патенту: 71054
Опубліковано: 15.11.2004
Автори: Чен Тао, Джоу Ю-Чен
МПК: H04B 7/005
Мітки: спосіб, корекції, передач, системі, рівнів, безпровідній, зв'язку, використання, потужністю, потужності, пристрій, базо, варіанти, множині, керування
Формула / Реферат:
1. Спосіб корекції рівнів потужності множини передач у безпровідній системі зв'язку, який включає:- прийом першого показника якості першої прийнятої передачі,- корекцію рівня потужності першої передачі, базуючись щонайменше частково на цьому першому показнику,- прийом другого показника якості другої прийнятої передачі, сформованого агрегуванням сукупності біт, призначених зворотному зв'язку для другої передачі, і-...
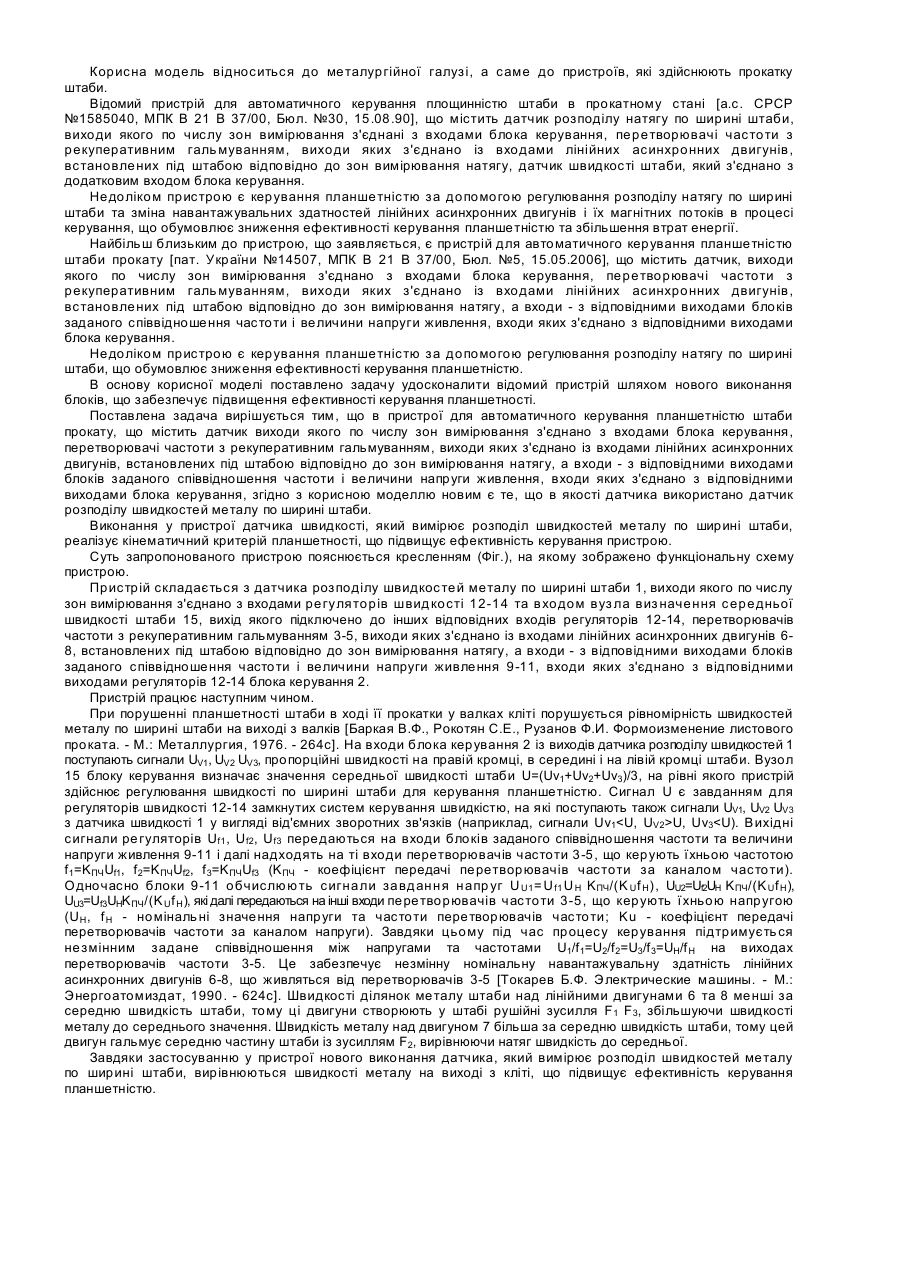
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 22411
Опубліковано: 25.04.2007
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: планшетністю, автоматичного, штаби, прокату, керування, пристрій
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик, виходи якого по числу зон вимірювання з'єднано з входами блока керування, перетворювачі частоти з рекуперативним гальмуванням, виходи яких з'єднано із входами лінійних асинхронних двигунів, встановлених під штабою відповідно до зон вимірювання натягу, а входи - з відповідними виходами блоків заданого співвідношення частоти і величини напруги живлення, входи...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 14507
Опубліковано: 15.05.2006
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: штаби, планшетністю, керування, автоматичного, прокату, пристрій
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами блока керування, перетворювачі частоти з рекуперативним гальмуванням, виходи яких з'єднано із входами лінійних асинхронних двигунів, встановлених під штабою відповідно до зон вимірювання натягу, датчик швидкості штаби, який з'єднано з додатковим входом блока керування,...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 22004
Опубліковано: 10.04.2007
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: автоматичного, пристрій, планшетністю, прокату, штаби, керування
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами регуляторів, виходи яких підключені до відповідних входів суматорів, та входом вузла визначення середньоарифметичного значення натягу штаби, виходи якого підключені до інших відповідних входів регуляторів, перетворювачі частоти з рекуперативним гальмуванням, виходи яких...
Попередній патент: Спосіб евакуації мешканців з висотних будівель
Наступний патент: Дисково-анкерний сошник
Випадковий патент: Спосіб автоматизованого розкрою прокату