Спосіб сумісного пошуку і виявлення радіолокаційних об’єктів
Номер патенту: 71735
Опубліковано: 15.12.2004
Автори: Коновалов Валерій Михайлович, Голкін Дмитро Васильович, Пастушенко Микола Савелійович, Худов Геннадій Володимирович



Формула / Реферат
1. Спосіб сумісного пошуку і виявлення радіолокаційних об'єктів, у якому формують діаграму направленості радіолокаційної системи, випромінюють зондувальні сигнали, приймають відбиті коливання, фільтрують прийняті коливання, формують пороговий сигнал, величина якого пропорційна елементам матриці втрат за неправильно прийняті рішення, порівнюють сигнал, пропорційний умовному відношенню правдоподібності, із пороговим сигналом, приймають рішення про виявлення радіолокаційного об'єкта при перевищенні величини сигналу, пропорційного умовному відношенню правдоподібності, величини порогового сигналу, який відрізняється тим, що формують вузьку діаграму направленості в напрямку найбільш ймовірного перебування об'єкта пошуку і виявлення, протягом заданого часу пошуку поступово розширюють діаграму направленості до границь заданої зони пошуку, у результаті чого формують поточну зону огляду, у якій апріорна імовірність перебування об'єкта максимальна, кожну поточну зону огляду опромінюють зондувальними сигналами, а потім приймають відбиті сигнали, що фільтрують в оптимальному просторово-часовому фільтрі, вихідні сигнали фільтра множать на ваговий коефіцієнт, пропорційний імовірності перебування об'єкта в поточній зоні огляду, зважений сигнал порівнюють з порогом, для чого використовують пристрій пошуку і виявлення, що включає передавач, блок керування і послідовно з'єднані антенну систему, діаграмоутворюючу систему, перемикач прийом-передача, приймач, оптимальний просторово-часовий фільтр, пристрій множення, пороговий пристрій, при цьому входом пристрою є вхід антенної системи, на перший вхід блока керування подають керуючий сигнал, пропорційний заданому часу пошуку, на другий - сигнал, пропорційний апріорній щільності імовірності місцезнаходження об'єкта, а на третій - сигнал, пропорційний положенню і розмірам заданої зони пошуку, другий вхід перемикача прийом-передача з'єднаний з виходом передавача, другий вхід пристрою множення з'єднаний із другим виходом блока керування, перший вихід якого з'єднаний із другим входом діаграмоутворюючої системи, а вихід порогового пристрою є виходом усього пристрою.
2. Спосіб сумісного пошуку і виявлення радіолокаційних об'єктів за п. 1, який відрізняється тим, що поточну зону огляду сканують вузькими діаграмами направленості.
Текст
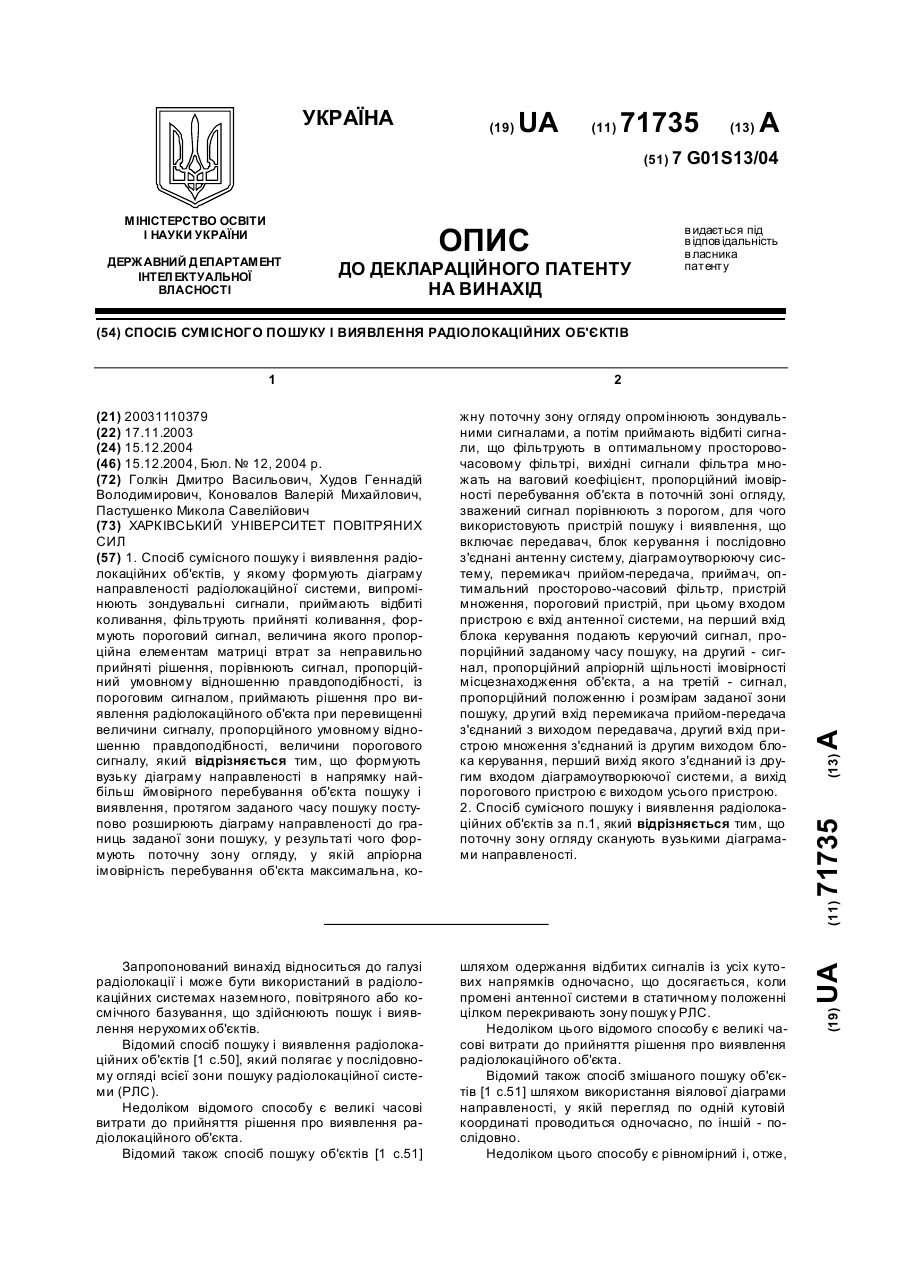
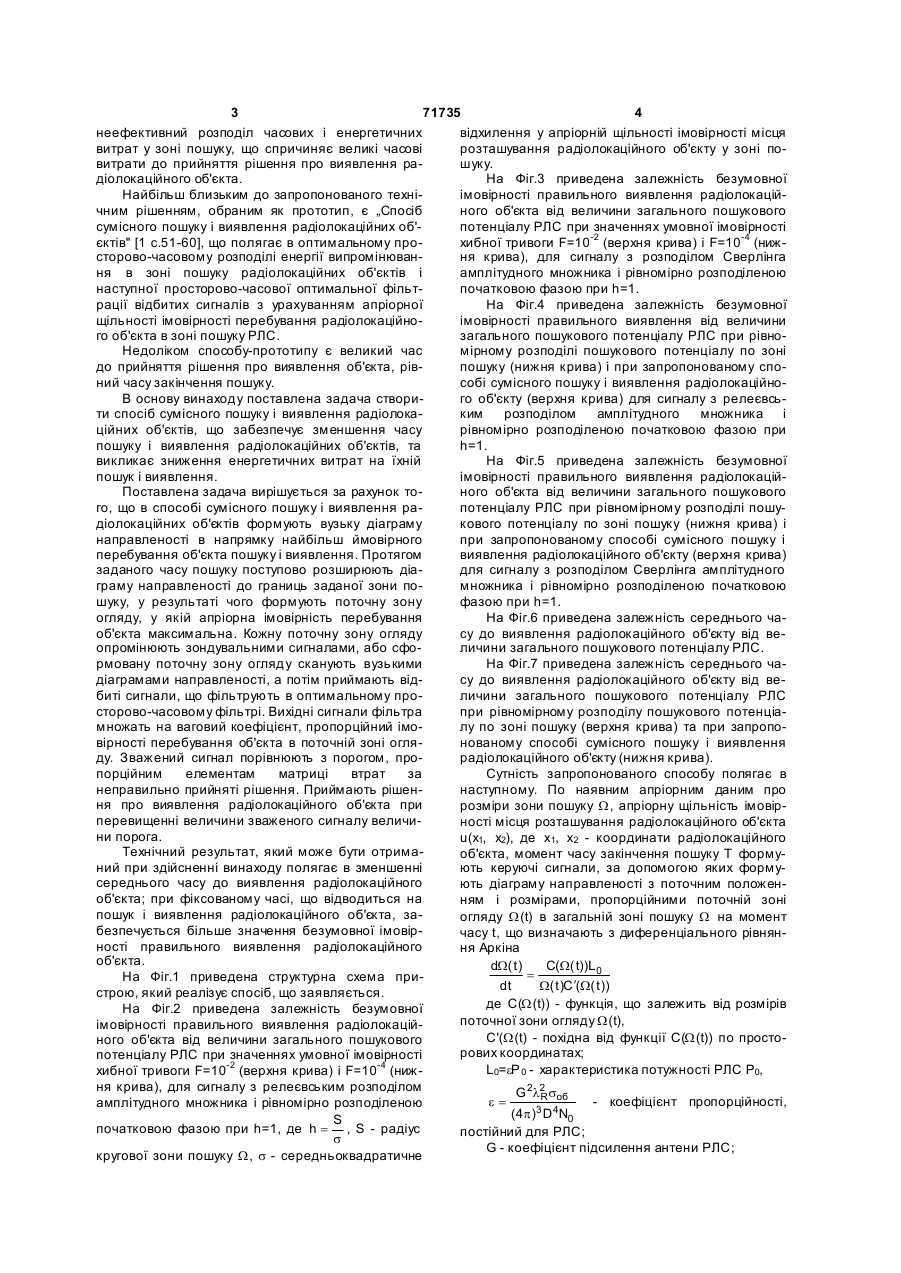
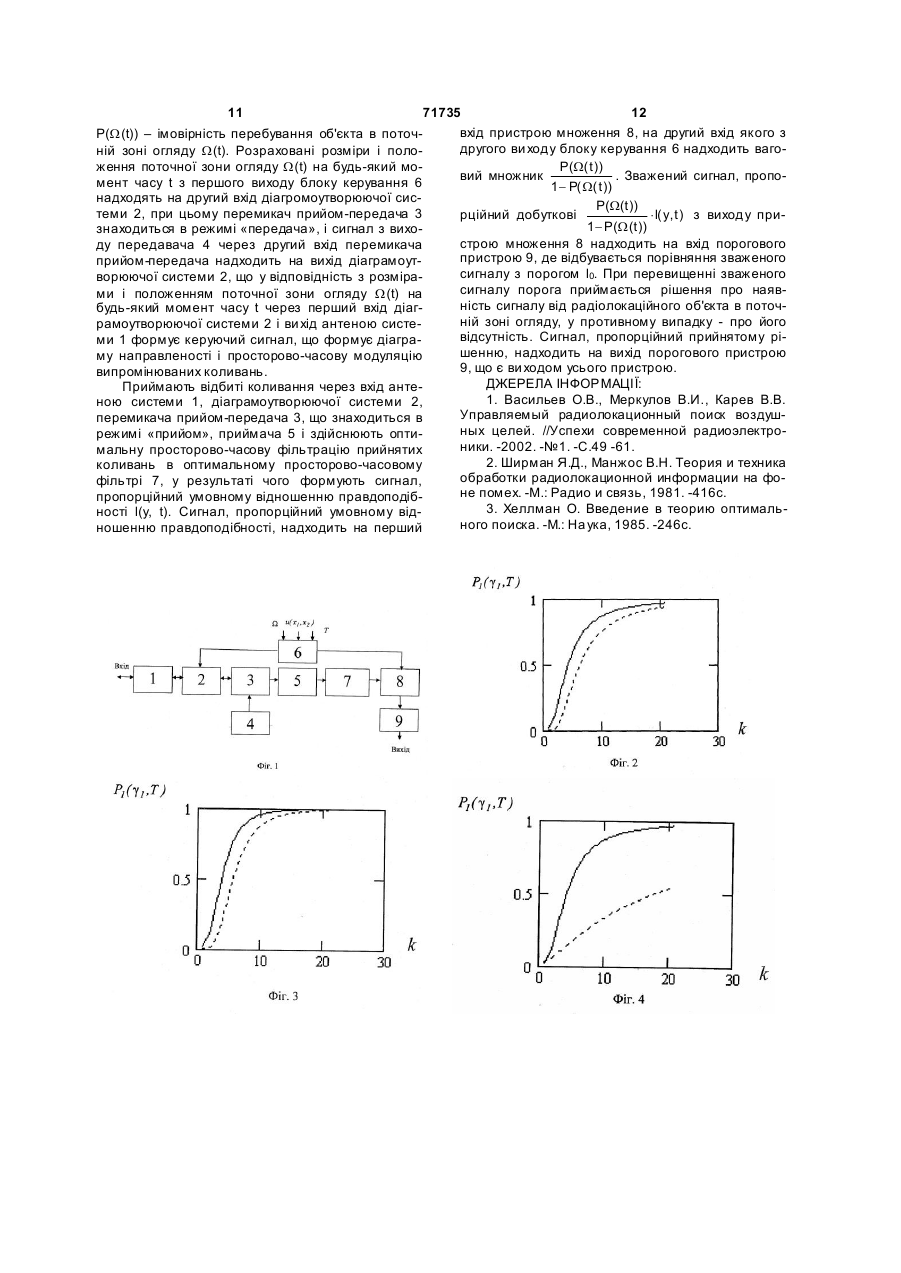
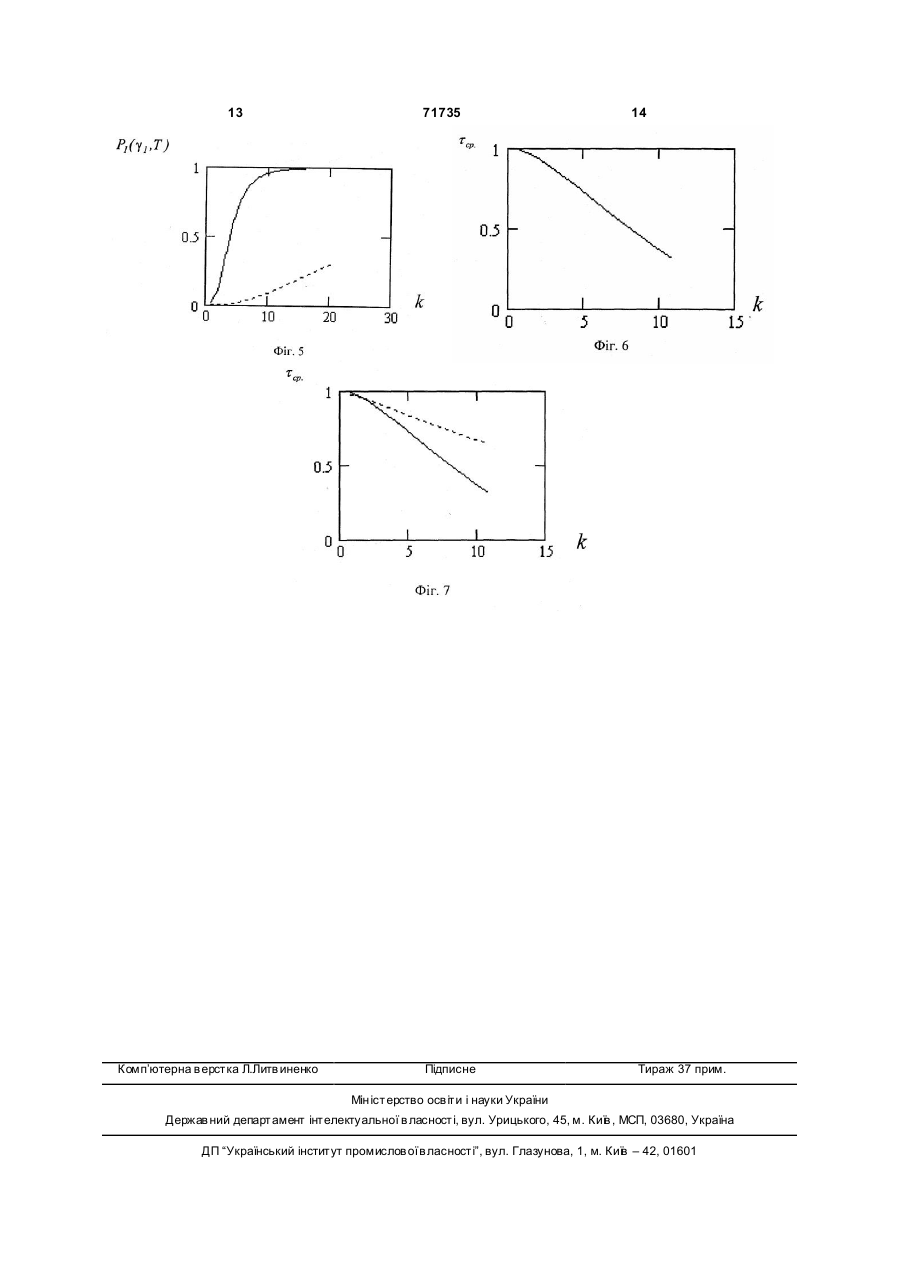
1. Спосіб сумісного пошуку і виявлення радіолокаційних об'єктів, у якому формують діаграму направленості радіолокаційної системи, випромінюють зондувальні сигнали, приймають відбиті коливання, фільтрують прийняті коливання, формують пороговий сигнал, величина якого пропорційна елементам матриці втрат за неправильно прийняті рішення, порівнюють сигнал, пропорційний умовному відношенню правдоподібності, із пороговим сигналом, приймають рішення про виявлення радіолокаційного об'єкта при перевищенні величини сигналу, пропорційного умовному відношенню правдоподібності, величини порогового сигналу, який відрізняється тим, що формують вузьку діаграму направленості в напрямку найбільш ймовірного перебування об'єкта пошуку і виявлення, протягом заданого часу пошуку поступово розширюють діаграму направленості до границь заданої зони пошуку, у результаті чого формують поточну зону огляду, у якій апріорна імовірність перебування об'єкта максимальна, ко A 2 71735 1 3 71735 4 неефективний розподіл часових і енергетичних відхилення у апріорній щільності імовірності місця витрат у зоні пошуку, що спричиняє великі часові розташування радіолокаційного об'єкту у зоні повитрати до прийняття рішення про виявлення рашуку. діолокаційного об'єкта. На Фіг.3 приведена залежність безумовної Найбільш близьким до запропонованого техніімовірності правильного виявлення радіолокаційчним рішенням, обраним як прототип, є „Спосіб ного об'єкта від величини загального пошукового сумісного пошуку і виявлення радіолокаційних об'потенціалу РЛС при значеннях умовної імовірності єктів" [1 с.51-60], що полягає в оптимальному прохибної тривоги F=10-2 (верхня крива) і F=10-4 (нижсторово-часовому розподілі енергії випромінювання крива), для сигналу з розподілом Сверлінга ня в зоні пошуку радіолокаційних об'єктів і амплітудного множника і рівномірно розподіленою наступної просторово-часової оптимальної фільтпочатковою фазою при h=1. рації відбитих сигналів з урахуванням апріорної На Фіг.4 приведена залежність безумовної щільності імовірності перебування радіолокаційноімовірності правильного виявлення від величини го об'єкта в зоні пошуку РЛС. загального пошукового потенціалу РЛС при рівноНедоліком способу-прототипу є великий час мірному розподілі пошукового потенціалу по зоні до прийняття рішення про виявлення об'єкта, рівпошуку (нижня крива) і при запропонованому споний часу закінчення пошуку. собі сумісного пошуку і виявлення радіолокаційноВ основу винаходу поставлена задача створиго об'єкту (верхня крива) для сигналу з релеєвсьти спосіб сумісного пошуку і виявлення радіолокаким розподілом амплітудного множника і ційних об'єктів, що забезпечує зменшення часу рівномірно розподіленою початковою фазою при пошуку і виявлення радіолокаційних об'єктів, та h=1. викликає зниження енергетичних витрат на їхній На Фіг.5 приведена залежність безумовної пошук і виявлення. імовірності правильного виявлення радіолокаційПоставлена задача вирішується за рахунок тоного об'єкта від величини загального пошукового го, що в способі сумісного пошуку і виявлення рапотенціалу РЛС при рівномірному розподілі пошудіолокаційних об'єктів формують вузьку діаграму кового потенціалу по зоні пошуку (нижня крива) і направленості в напрямку найбільш ймовірного при запропонованому способі сумісного пошуку і перебування об'єкта пошуку і виявлення. Протягом виявлення радіолокаційного об'єкту (верхня крива) заданого часу пошуку поступово розширюють діадля сигналу з розподілом Сверлінга амплітудного граму направленості до границь заданої зони помножника і рівномірно розподіленою початковою шуку, у результаті чого формують поточну зону фазою при h=1. огляду, у якій апріорна імовірність перебування На Фіг.6 приведена залежність середнього чаоб'єкта максимальна. Кожну поточну зону огляду су до виявлення радіолокаційного об'єкту від веопромінюють зондувальними сигналами, або сфоличини загального пошукового потенціалу РЛС. рмовану поточну зону огляду сканують вузькими На Фіг.7 приведена залежність середнього чадіаграмами направленості, а потім приймають відсу до виявлення радіолокаційного об'єкту від вебиті сигнали, що фільтрують в оптимальному проличини загального пошукового потенціалу РЛС сторово-часовому фільтрі. Вихідні сигнали фільтра при рівномірному розподілу пошукового потенціамножать на ваговий коефіцієнт, пропорційний імолу по зоні пошуку (верхня крива) та при запроповірності перебування об'єкта в поточній зоні оглянованому способі сумісного пошуку і виявлення ду. Зважений сигнал порівнюють з порогом, прорадіолокаційного об'єкту (нижня крива). порційним елементам матриці втрат за Сутність запропонованого способу полягає в неправильно прийняті рішення. Приймають рішеннаступному. По наявним апріорним даним про ня про виявлення радіолокаційного об'єкта при розміри зони пошуку W, апріорну щільність імовірперевищенні величини зваженого сигналу величиності місця розташування радіолокаційного об'єкта ни порога. u(х1, х2), де х1, х2 - координати радіолокаційного Технічний результат, який може бути отримаоб'єкта, момент часу закінчення пошуку Т формуний при здійсненні винаходу полягає в зменшенні ють керуючі сигнали, за допомогою яких формусереднього часу до виявлення радіолокаційного ють діаграму направленості з поточним положеноб'єкта; при фіксованому часі, що відводиться на ням і розмірами, пропорційними поточній зоні пошук і виявлення радіолокаційного об'єкта, заогляду W(t) в загальній зоні пошуку W на момент безпечується більше значення безумовної імовірчасу t, що визначають з диференціального рівнянності правильного виявлення радіолокаційного ня Аркіна об'єкта. dW( t ) C(W( t))L0 = На Фіг.1 приведена структурна схема приdt W( t )C¢(W( t )) строю, який реалізує спосіб, що заявляється. де С(W(t)) - функція, що залежить від розмірів На Фіг.2 приведена залежність безумовної поточної зони огляду W(t), імовірності правильного виявлення радіолокаційС'(W(t) - похідна від функції С(W(t)) по простоного об'єкта від величини загального пошукового рових координатах; потенціалу РЛС при значеннях умовної імовірності L0=eР 0 - характеристика потужності РЛС Р0, хибної тривоги F=10-2 (верхня крива) і F=10-4 (нижня крива), для сигналу з релеєвським розподілом G 2l2 sоб R e= - коефіцієнт пропорційності, амплітудного множника і рівномірно розподіленою (4 p )3 D 4N0 S початковою фазою при h=1, де h = , S - радіус постійний для РЛС; s G - коефіцієнт підсилення антени РЛС; кругової зони пошуку W, s - середньоквадратичне 5 71735 6 lR - довжина хвилі РЛС; P1( g1, t) = òò u( x1, x2 )P( g 1 / H1, x1, x 2 )dx1dx 2 ® max, W( t ) sоб - ефективна поверхня розсіювання радіолокаційного об'єкта; l ( x1, x2 , t) dx1dx 2 ³ 0, x Î W( t), t > 0, D - дальність до радіолокаційного об'єкта; òò l( x1, x2 , t) dx1dx2 = L0 , t > 0, N0 - спектральна щільність потужності шумів W( t) (1) випромінювання. t Шляхом керування діаграмою направленості ò l( x1, x2 , t) dt = j( x1, x2 , t ), 0 РЛС здійснюють просторово-часову модуляцію випромінюваних коливань. òò j( x1, x2 , t) dx1dx 2 = L0 t; W( t) Суть подальших операцій полягає в наступноде P1(g1, t) - безумовна імовірність виявлення му. Приймають відбиті коливання і здійснюють радіолокаційного об'єкта за час t у зоні огляду W(t); оптимальну просторово-часову фільтрацію прийнятих коливань, у результаті чого формують сигнал, Р(g1/Н1, х1, х2) - умовна імовірність виявлення пропорційний умовному відношенню правдоподібрадіолокаційного об'єкта; ності l(х1, х2 , t) - функція щільності пошуку або стратегія пошуку; W (у / H1 ) l( у, t ) = , j(х1, х2, t) - пошукове зусилля в точці (х1, х2) на W ( у / H0 ) момент часу t. де Н1 - гіпотеза про наявність сигналу від раВизначаючи з рівняння радіолокації [2] віднодіолокаційного об'єкта в прийнятій реалізації у; шення сигнал/шум q2(x1(t), x2(t)) у точці (х1, х2) зони Ho - гіпотеза про відсутність сигналу від радіопошуку W, пошукове зусилля j(х1 , х2, t) зв’язують з локаційного об'єкта в прийнятій реалізації у; відношенням сигнал/шум наступною залежністю W(у/H1) - щільність імовірності наявності сигj(х1, х2, t)=0,5q 2(x1(t), x2(t)) (2) налу від радіолокаційного об'єкта при прийомі реРішення оптимізаційної задачі (1) відшукують у алізації у; класі рівномірно-оптимальних стратегій пошуку [3]. W(у/H0) - щільність імовірності відсутності сигОбласть первинного пошуку визначають з рівнянналу від радіолокаційного об'єкта при прийомі реня Аркіна як W с:{u{х1, х2)>С(t)}. С(t) - постійна для алізації у. всіх точок поточної зони огляду величина. ВрахоСформований сигнал зважують з коефіцієнтом вуємо, що моментові часу t(х1, х2) початку переP(W( t)) гляду точки з координатами (х1, х2) відповідає по, де P( W(t )) = òò u(х1, х 2 )dx1, dx2 - імовір1- P( W(t )) точна точка огляду (x1(t), x2(t)), W( t ) ність перебування радіолокаційного об'єкта в поточній зоні огляду W(t) на момент часу t. Формують сигнал, величина якого пропорційна порогу П01 l0 = , де П 01, П 10 - елементи матриці втрат за П10 неправильно прийняті рішення. Зважений сигнал порівнюють із пороговим сигналом. При перевищенні величини зваженого сигналу величини порогового рівня приймають рішення про виявлення радіолокаційного об'єкта. У противному випадку приймають рішення про відсутність у прийнятій вибірці сигналу від радіолокаційного об'єкта. Апріорну щільність імовірності місця розташування радіолокаційного об'єкта по двох координатах х1 , і х2 у круговій зоні пошуку визначають усіченим нормальним законом з нульовим математичним очікуванням u( x1, x2 ) = де A = A 2ps 2 1 S2 2 s2 exp( 2 x1 + x 2 2 2s 2 ), - константа, що нормує. 1- e Центр зони пошуку збігається з початком координат, x2 + x 2 = S2 . 1 2 При фіксованому на постійному рівні значенні безумовної імовірності хибної тривоги P0(g1, t), оптимізаційна задача формулюється в такий спосіб: C( t ) = A ×e W( t ) 2 2ps 2ps2 Підставляють необхідні функції в диференційне рівняння Аркіна і вирішують отримане диференційне рівняння з нульовою початковою умовою, (3) W( t ) = 2s p L0 t . Як видно з (3) діаграма направленості РЛС повинна бути сформована як коло з центром у центрі зони пошуку W і радіусом L0 t (4) . p Це буде відбуватися доти, поки розміри діаграми направленості РЛС не стануть рівними розміру радіуса зони пошуку W. Цей момент часу знайдемо з умови r(t1)=S. (5) Підставляючи (4) у (5), вирішують отримане рівняння відносно t1, r( t ) = 2s 4 t1 = pS4 (6) . 4 s2L 0 У проміжку часу [0, t1] стратегія пошуку l(х1, х2 , t) має вигляд ì L0 2 для x 1 + x 2 < r 2 ( t ); 2 ï l 1( x 1, x 2 ; t ) = í W ( t ) ï 0 ; для х 2 + х 2 ³ r 2 ( t ). î 1 2 (7) У точках зони пошуку, де поширюється стратегія пошуку, за час [0, t1] накопичується пошуковий потенціал 7 j1(x1x2 ) = 71735 чини з в інтервалі [0, 1] t1 l1( x1, x 2; t )dt, t( x 1, x 2 ) ò (8) де t(х1, х2) - функція, що має зміст часу початку перегляду точок (х1, х2) зони пошуку. Цю функцію отримують з умови 2 x1 + x 2 2s = 2 t( x1, x= 2) L0t (x1, x 2 ) , p p( x2 + x 2 )2 1 2 (9) . 4 s2L 0 Підставляючи (6) і (9) у (8), бер уть інтеграл, ì ï 2 2 2 ï S - x1 - x2 2 2 2 j1(x1, x 2 ) = í для х1 + х 2 < S ; (10) 2 2s ï ï 2 2 2 î0; для х1 + х2 ³ S . Пошуковий потенціал у загальному випадку залежить і від часу. Вираження (10) записано для конкретного моменту часу t 1, тому тут залежність від часу опущена. У загальному ж випадку для знаходження пошукового потенціалу в (8) заміняють верхню межу інтегрування t ò l1( x1, x2 ; )dt. j1(x1, x 2 ) = (11) t ( x 1, x 2 ) Після моменту t 1 стратегія пошук у поширюється в умовах рівномірної щільності розподілу - «п'єдесталу» до моменту закінчення пошуку Т ì L0 2 ; для х1 + x2 < S2 ; 2 ï l 2 ( x1, x2 ; t ) = í pS2 (12) ï0; для x2 + x 2 ³ S 2. 1 2 î У точках зони пошуку за час [t1, Т] накопиться пошуковий потенціал T j 2( x1, x 2 ) = ò l 2 (x1, x 2; t )dt = t1 L0 (T - t1 ) 2 pS 8 h2 k r2 + 2 - 1 ; r1 < h; 0 £ b £ 360o. (14) 4 ph 2 Визначивши кількість пошукового потенціалу, що накопичено в точках (х1, х2) зони пошуку і враховуючи зв'язок пошукового потенціалу з величиною q2(х1, х2) згідно (2), розраховують умовну і безумовну імовірності правильного виявлення радіолокаційного об'єкта за час пошуку Т. При виявленні когерентного сигналу, відбитого від радіолокаційного об'єкта, що характеризується випадковою початковою фазою і випадковим амплітудним множником широкий клас реальних розподілів амплітудного множника описують моделлю m-розподілу Накагамі [2]: j(r1, b) = W (b) = Kmb2m-1e-mb , де b - амплітудний множник; Кm=2m m/Г(m) - коефіцієнт, що нормує; Г(m) - гама функція. Для сигналу з випадковою амплітудою і рівномірно розподіленою початковою фазою умовна імовірність правильного виявлення сигналу стосовно до довільного m - розподілу амплітудного множника має вигляд [2]: 2 2 2 d(m -1) é e - s0 ( 2 u- q ( x1 , x 2 )) / 4 u ù ê ú, du(m -1) ê 2u - q2 ( x1, x 2 ) ú ë û P ( g1 / H1, x1, x 2 ) = ( -1)m -1 Km 1 де q2 ( x1, x2 ) 1 ; S0 = 2 ln( ); 2 F F=Р0(g1 /Но, х1, х2) - умовна імовірність помилкової тривоги; q2(х1, х2) - відношення сигнал/шум у точці (х1 , х2) зони пошуку W. Для релеєвського розподілу m=1 [2] u =m+ 1 (13) Для зручності подальших розрахунків вводять полярну систему координат r і b, а також наступні L T t t r позначення: k = 02 , s = , s1 = 1 , r1 = . ВираT T s s ження (7) і (8) для стратегії пошук у з урахуванням переходу до полярної системи координат і переходу в обох частинах до безрозмірних величин шляхом домноження на час пошуку Т мають вигляд ì k1/ 2 ï ; s Î [0, s1] 1/ 2 ï 2(p s) ï ïr < h; 0 £ b £ 360o, l (r1, b, s)T = í 1 ï k ï 2 ; s Î [s1,1] ï ph ïr < h; 0 £ b £ 360o î 1 а для пошукового потенціалу при зміні вели (1+ 2 q ( x1 ,x 2 ) 2 . P1( g1 / H1, x1, x2 ) = F Для розподілу Сверлінга m=2 [2] æ ç ç P1( g 1 / H1, x 1, x 2 ) = ç1+ ç ç ç ç è q2 ( x 1, x 2 ) 4 2 æ ö ç 1+ q ( x 1, x 2 ) ÷ ç ÷ 4 è ø 2 (15) ö 1 ÷ 2 ÷ q ( x1 , x 2 ) 1 ÷ 1+ 4 (16) ln ÷ × F F ÷ ÷ ÷ ø Вираження для безумовної імовірності правильного виявлення радіолокаційного об'єкта для різних значень m одержують, підставляючи вираження (15), (16) у (1), враховуючи (2) і переходячи до полярних координат. Для т=1 P1( g1, T = h 1 2 ò exp( h 0 1- e 2 для m=2 ln( / F) 1 r2 - 1 )r1d r1; 2 2 2 h k r 1+ + - 1 4 p h2 2 2 (17) 9 71735 10 h2 k2 r2 1 + - 1 ln( ) 2 1 1 r2 8 2ph 4 F P1( g1, T ) = ((1+ ln( )) exp( - 1 ))r1dr1. (18) 2 2 2 2 2 2 2 h ò F 2 h k r h k r 0 (1 + + - 1 )2 1+ + - 1 1- e 2 8 2p h2 4 8 2ph 4 Мінімальне значення величини k, що пропорного виявлення розраховують відповідно до вираційна значенню загального пошукового потенціалу ження РЛС, вибирають з умови обов'язкового перегляду 1 (25) P1( g1 / H1, x2 , t ) = F 1+ j( x1, x2 ,t ) , ph 4 всієї зони пошуку W, тобто Т³t1 , звідкіля k ³ . 4 де j(х1, х2, t) - пошуковий потенціал, накопиПри порівнянні запропонованого способу з вічений у точці з координатами (х1, х2) на момент домими способами просторово-часового розподілу часу t, що розраховується, використовуючи (11), пошукових зусиль у РЛС [1 с.50-60], що припуска(13) і введені раніше позначення ють рівномірний розподіл пошукового потенціалу 2 ks r1 k h2 (26) по зоні пошуку, вираження для умовної імовірності j(r1, s) = + 2. p 2 ph 4 правильного виявлення радіолокаційного об'єкта Підставляючи вираження (24) у (23), викориспри рівномірному розподілі пошукового потенціалу товуючи (25), (26), (4) і вводячи позначення по зоні пошуку мають вигляд: для m=1 t ср. tср. = , одержують 1 T k 1+ 2 ks (19) 1 2 P1(g1 / H1, x1, x 2 ) = F ph 1 p ln( ) 1 r2 F t с р. = 1 - ò ( - 1 )r1d r1 )ds. (27) ò exp(h 2 2 2 h 4 2 0 для m=2 P1( g1 / H1, x1, x2 ) = (1 + k 2ph2 (1+ 1 k 2p h )2 2 ln( ))F F 1+ 1 k 2 ph 2 . (20) Безумовну імовірність правильного виявлення радіолокаційного об'єкта при рівномірному розподілі пошукового потенціалу по зоні пошуку одержують, підставляючи (19), (20) у (1). Використовуючи введені раніше позначення, при t®Т, для m=1 P1( g1, T ) = для m=2 F 1+ 1 k 1+ 2 F ph h 1 k 2 ph 2 P1( g 1,T ) = ò exp( h2 0 1- e 2 (1 + 2 r1 )r1dr1, 2 1 k ln( ) F k 2 2 ph 2 (1 + ) 2 ph 2 1- e h2 2 h ò exp( 0 (21) 2 r1 )r d r . 2 1 1 (22) Запропонований спосіб пошуку і виявлення забезпечує більш високу імовірність правильного виявлення радіолокаційного об'єкта. Це особливо помітно за умови обмеження на величину загального пошукового потенціалу (малі значення величини k). Середній час до виявлення об'єкта розраховують по формулі T tср. = ò (1 - P1(g1, t))d t, (23) 0 де P1( g1, t) = òò u( x1, x2 )P1(g1 / H1, x1, x2 , t )dx1dx 2, W( t ) (24) безумовна імовірність виявлення радіолокаційного об'єкта на момент часу t. Вираження для умовної імовірності правиль 1-e 2 0 1+ ks r1 k h + p 2 ph2 4 При рівномірному розподілі пошукового потенціалу РЛС по всій зоні пошуку середній час до виявлення радіолокаційного об'єкта розраховують, використовуючи (23), (21) tср. = 1 F 1+ 1 k ph 2 h 2 ò exp( h 0 e 2 2 r1 )r1dr1. 2 (28) 1Запропонований спосіб сумісного пошуку і виявлення радіолокаційного об'єкта дає виграш у середньому часі до виявлення, що зростає зі збільшенням пошукового потенціалу РЛС (Фіг.7). Запропонований спосіб може бути реалізований за допомогою пристрою (Фіг.1). Пристрій включає передавач 4, блок керування 6 і послідовно з'єднані антенну систему 1, діаграмоутворюючу систему 2, перемикач прийом-передача 3, приймач 5, оптимальний просторово-часовий фільтр 7, пристрій множення 8, пороговий пристрій 9. При цьому входом пристрою є вхід антеною системи 1. На перший вхід блоку керування 6 подають керуючий сигнал, пропорційний заданому часу пошуку, на другий - сигнал, пропорційний апріорної щільності імовірності місцезнаходження радіолокаційного об'єкта, а на третій - сигнал, пропорційний положенню і розмірам заданої зони пошуку. Другий вхід перемикача прийом-передача 3 з'єднаний з виходом передавача 4. Другий вхід пристрою множення 8 з'єднаний з другим виходом блоку керування 6, перший вихід якого з'єднаний із другим входом діаграмоутворюючої системи 2. Вихід порогового пристрою 9 є виходом усього пристрою. Робота пристрою полягає в наступному. У блоці керування розраховують розміри і положення поточної зони огляду W(t) на будь-який момент P(W( t)) часу t, а також ваговий множник , де 1- P( W(t )) 11 71735 12 вхід пристрою множення 8, на другий вхід якого з P(W(t)) – імовірність перебування об'єкта в поточдругого ви ходу блоку керування 6 надходить вагоній зоні огляду W(t). Розраховані розміри і положення поточної зони огляду W(t) на будь-який моP(W( t )) вий множник . Зважений сигнал, пропомент часу t з першого виходу блоку керування 6 1- P( W( t )) надходять на другий вхід діагромоутворюючої сисP(W(t )) теми 2, при цьому перемикач прийом-передача 3 рційний добуткові × l( у, t ) з виходу при1- P(W (t )) знаходиться в режимі «передача», і сигнал з вихострою множення 8 надходить на вхід порогового ду передавача 4 через другий вхід перемикача пристрою 9, де відбувається порівняння зваженого прийом-передача надходить на вихід діаграмоутсигналу з порогом l0. При перевищенні зваженого ворюючої системи 2, що у відповідність з розмірасигналу порога приймається рішення про наявми і положенням поточної зони огляду W(t) на ність сигналу від радіолокаційного об'єкта в поточбудь-який момент часу t через перший вхід діагній зоні огляду, у противному випадку - про його рамоутворюючої системи 2 і ви хід антеною систевідсутність. Сигнал, пропорційний прийнятому ріми 1 формує керуючий сигнал, що формує діаграшенню, надходить на вихід порогового пристрою му направленості і просторово-часову модуляцію 9, що є ви ходом усього пристрою. випромінюваних коливань. ДЖЕРЕЛА ІНФОРМАЦІЇ: Приймають відбиті коливання через вхід анте1. Васильев О.В., Меркулов В.И., Карев В.В. ною системи 1, діаграмоутворюючої системи 2, Управляемый радиолокационный поиск воздушперемикача прийом-передача 3, що знаходиться в ных целей. //Успехи современной радиоэлектрорежимі «прийом», приймача 5 і здійснюють оптиники. -2002. -№1. -С.49 -61. мальну просторово-часову фільтрацію прийнятих 2. Ширман Я.Д., Манжос В.Н. Теория и техника коливань в оптимальному просторово-часовому обработки радиолокационной информации на фофільтрі 7, у результаті чого формують сигнал, не помех. -М.: Радио и связь, 1981. -416с. пропорційний умовному відношенню правдоподіб3. Хеллман О. Введение в теорию оптимальності l(у, t). Сигнал, пропорційний умовному відного поиска. -М.: На ука, 1985. -246с. ношенню правдоподібності, надходить на перший 13 Комп’ютерна в ерстка Л.Литв иненко 71735 Підписне 14 Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for combined radar searching and detecting objects
Автори англійськоюHolkin Dmytro Vasyliovych
Назва патенту російськоюСпособ совместного радиолокационного поиска и обнаружения объектов
Автори російськоюГолкин Дмитрий Васильевич
МПК / Мітки
МПК: G01S 13/04
Мітки: пошуку, радіолокаційних, спосіб, сумісного, виявлення, об'єктів
Код посилання
<a href="https://ua.patents.su/7-71735-sposib-sumisnogo-poshuku-i-viyavlennya-radiolokacijjnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб сумісного пошуку і виявлення радіолокаційних об’єктів</a>
Спосіб маскування військових інженерних споруд від радіолокаційних засобів розвідки
Номер патенту: 63352
Опубліковано: 15.01.2004
Автори: Кабардін Микола Костянтинович, Тітова Марина Анатоліївна, Однороженко Василь Борисович, Алексєєв Юрій Сергійович, Степанян Бениамин Гургенович, Межуєв Микола Миколайович
МПК: F41H 3/00
Мітки: споруд, радіолокаційних, засобів, розвідки, маскування, інженерних, спосіб, військових
Формула / Реферат:
Спосіб маскування військових інженерних споруд від радіолокаційних засобів розвідки, при якому інженерну споруду, у конструкцію каркаса якої входить металева арматура, зафарбовують захисною фарбою, що має властивості поглинання радіохвиль, а маскування здійснюють шляхом відображення чи поглинання радіохвиль, який відрізняється тим, що попередньо при спорудженні військової інженерної споруди розміщують металеву арматуру так, щоб вона мала...
Спосіб розпізнавання державної належності радіолокаційних цілей

Номер патенту: 45733
Опубліковано: 15.04.2002
Автори: Обод Іван Іванович, Полюга Валентин Петрович, Вінник Анатолій Тихонович
МПК: G01S 13/75, G01S 13/79
Мітки: державної, належності, радіолокаційних, спосіб, розпізнавання, цілей
Формула / Реферат:
Спосіб розпізнавання державної належності радіолокаційних цілей, який полягає в тому, що випромінюють запитні сигнали, які приймають, дешифрують і випромінюють відповідні сигнали, які приймають і порівнюють їх відповідність із запитними сигналами, і за результатами порівняння видають сигнал розпізнання, який відрізняється тим, що запитні сигнали запам'ятовують, порівнюють запитні сигнали, що надходять, з тими, що зберігають в пам'яті і при...
Спосіб сумісного виробництва аміаку і метанолу, установка для сумісного виробництва аміаку і метанолу, спосіб модернізації установки синтезу аміаку та спосіб модернізації установки сумісного виробництва аміаку
Номер патенту: 48186
Опубліковано: 15.08.2002
Автори: Фаббрі Франко, Філіппі Ерманно, Бадано Марко
МПК: C01B 3/02, C07C 29/151, C01C 1/04, C07C 31/00, C01B 3/38
Мітки: виробництва, метанолу, модернізації, спосіб, установка, сумісного, установки, аміаку, синтезу
Формула / Реферат:
1. Спосіб сумісного виробництва аміаку і метанолу в установці, що включає першу секцію первинного риформінгу і секцію вторинного риформінгу, які розташовані послідовно, секцію синтезу аміаку і секцію синтезу метанолу, при цьому подають метан і пару до згаданої першої секції первинного риформінгу, проводять реакції згаданих метану та пари в згаданій першій секції первинного риформінгу і далі у згаданій секції вторинного риформінгу для...
Спосіб автоматичного пошуку мовленнєвого фрагмента в суцільному масиві звукозапису та голосовий електронний довідник на його основі
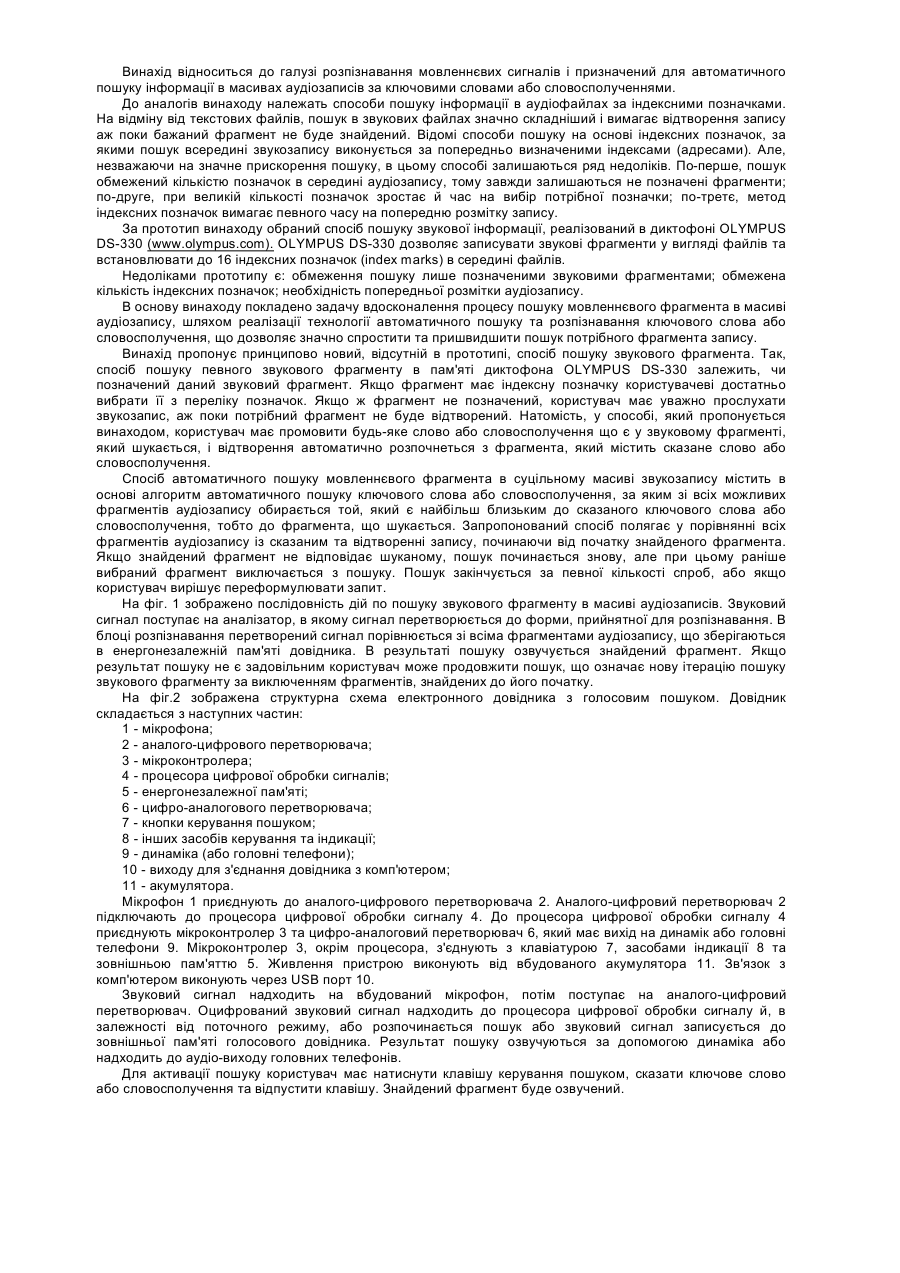
Номер патенту: 67699
Опубліковано: 15.06.2004
Автори: Вінцюк Тарас Климович, Гриценко Володимир Ільїч, Федорин Ярослав Володимирович, Ілюшин Сергій Аркадійович, Ситніков Даніїл Анатолійович, Куптель Олег Григорович, Павлов Олег Ігоревич
МПК: G10L 15/00
Мітки: довідник, суцільному, фрагмента, мовленнєвого, електронний, основі, звукозапису, голосовий, спосіб, масиві, пошуку, автоматичного
Формула / Реферат:
1. Спосіб автоматичного пошуку мовленнєвого фрагмента в суцільному масиві звукозапису, який базується на виборі фрагмента, найбільш подібного до фрагмента, що шукається, який відрізняється тим, що введений для пошуку звуковий сигнал, перетворюють до цифрової форми, виділяють параметри розпізнавання, далі за алгоритмом автоматичного пошуку ключового слова порівнюють зі всіма фрагментами в масиві аудіозапису і в результаті порівняння отримують...
Спосіб виявлення малорухомих об’єктів
Номер патенту: 31335
Опубліковано: 15.12.2000
Автори: Рибачук Олег Ігорьович, Карпенко Владислав Володимирович, Даник Юрій Григорович, Дяченко Дмитро Володимирович
МПК: G01S 17/00
Мітки: малорухомих, об'єктів, виявлення, спосіб
Формула / Реферат:
Спосіб виявлення малорухомих об'єктів що полягає в прийомі випромінювання об'єктів і фону оптичною системою, формуванні і реєстрації двох зображень об'єкту і фону, перетворенні зображень в двоградаційні, що відрізняється тим, що додатково здійснюють запам'ятовування зображень, що сформувалися, отриманих в заданої області простору, в запам'ятовуючому приладі, виробляють синхронне перекидання розузгоджених на деякий кут оптичних осей каналів...
Попередній патент: Спосіб одержання клейової композиції
Наступний патент: Комбікорм для годівлі курей-несучок
Випадковий патент: Побудова списку опорних картинок для кодування відео