Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею
Номер патенту: 74227
Опубліковано: 25.10.2012
Автори: Томсон Андрій Владиславович, Літвінов Костянтин Анатолійович, Шаповалов Олексій Іванович, Стенцель Йосип Іванович
Формула / Реферат
Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею, який складається з блока обчислення та індикації та блока управління датчиком, що включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, яке з'єднане з п'єзокерамічним випромінювачем, а компаратор з'єднаний з джерелом опорної напруги, мікроконтролер - з блоком перетворення сигналу, а блок визначення амплітуди сигналу - з підсилювачем і мікроконтролером, який відрізняється тим, що мікроконтролер передає до блока перетворення сигналу значення амплітуди фонового сигналу та часу розповсюдження ультразвукового сигналу, де вони перетворюються у частотно-модульований сигнал, а мікроконтролер блока обчислення та індикації з'єднано з блоком індикації, пам'яті та блоком перетворення сигналу, який перетворює частотно-модульований сигнал від блока управління датчиком у відповідні значення амплітуди фонового сигналу та часу розповсюдження ультразвукового сигналу, виконує компенсацію похибки вимірювання рівня середовища з нерівномірною поверхнею за результатами математичної обробки заданої кількості визначених у процесі вимірювання рівня значень амплітуди фонового сигналу.
Текст
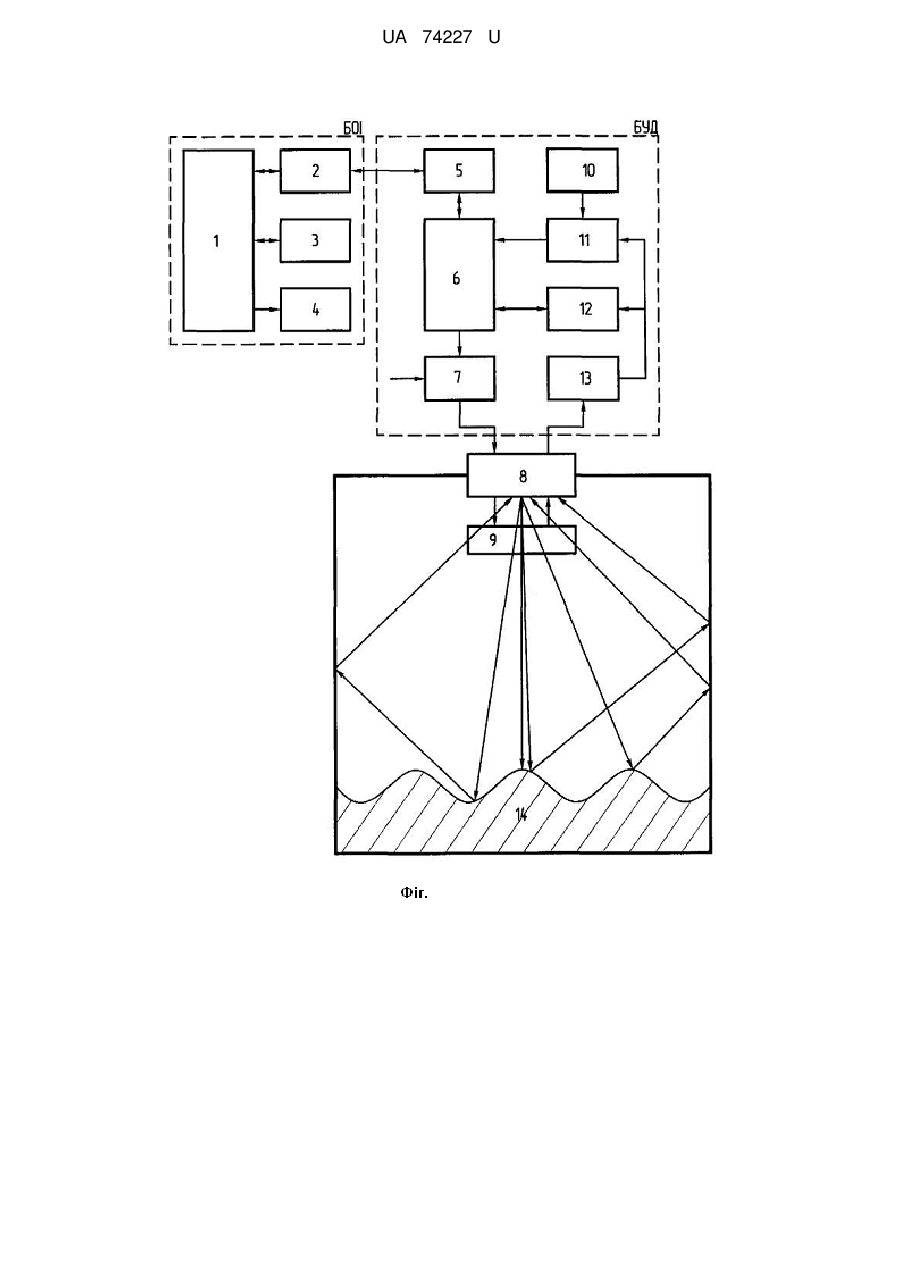
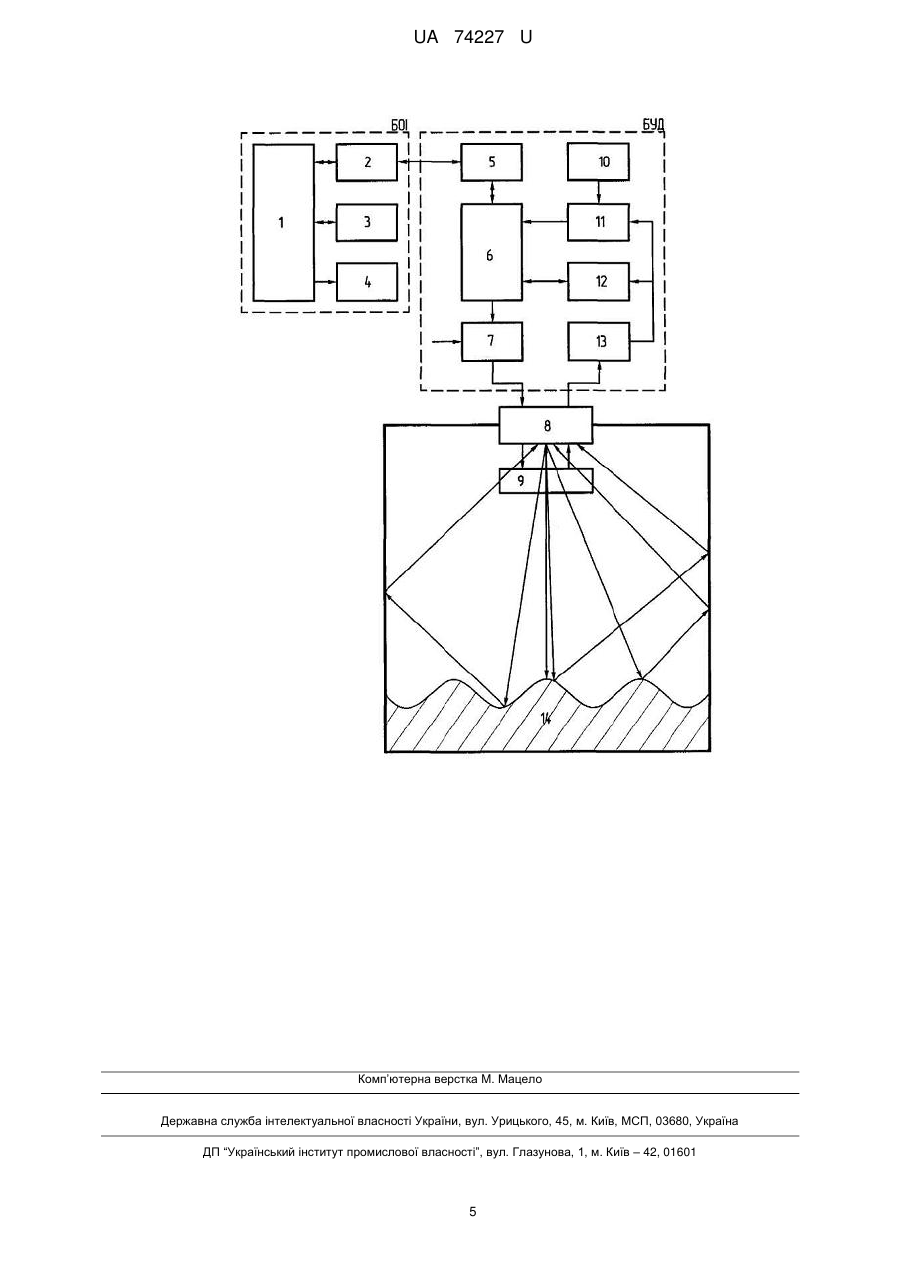
Реферат: Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею складається з блока обчислення та індикації та блока управління датчиком, що включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, яке з'єднане з п'єзокерамічним випромінювачем. Мікроконтролер передає до блока перетворення сигналу значення амплітуди фонового сигналу та часу розповсюдження ультразвукового сигналу, де вони перетворюються у частотномодульований сигнал. UA 74227 U (12) UA 74227 U UA 74227 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана для вимірювання та контролю рівня рідинних середовищ з нерівномірною поверхнею у хімічній, нафтовій, енергетичній, фармацевтичній, металургійній та інших галузях промисловості. Відомий ультразвуковий пристрій для вимірювання рівня (патент (А.С.) 1778540, G01F 23/28, 30.11.1992 "Ультразвуковой способ измерения уровня и устройство для его осуществления"), в якому підвищення точності вимірювання рівня речовин з нерівномірною поверхнею (киплячі рідини, нестаціонарні потоки рідини у відкритих каналах тощо) забезпечується за рахунок зміни частоти заповнення зондуючих імпульсів, у діапазоні, який забезпечує вірогідність виключення хоча б один раз інтерференцію основного сигналу, який відповідає дійсному рівню. У результаті з декількох прийнятих імпульсів вибирається один, який має найменший час проходження зондуючим імпульсом подвійної відстані від контрольованого середовища до електроакустичного перетворювача, що відповідає дійсному рівню. Недоліками цього засобу вимірювання рівня є, по-перше, залежність показань від параметрів середовища (температури, тиску, складу тощо), в якому розповсюджуються зондуючі ультразвукові імпульси, по-друге, - низька швидкодія. Найбільш близьким за технічною суттю до запропонованого ультразвукового пристрою є ультразвуковий рівнемір (патент на корисну модель № 59060, G01F 23/28, 10.05.2011 "Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею") (прототип), вимірювання рівня в якому здійснюється за принципом визначення часу проходження ультразвуковим імпульсом подвійної відстані між п'єзокерамічним випромінювачем і поверхнею контрольованого середовища, при цьому амплітуда випроміненого імпульсу змінюється в залежності від визначеного рівня таким чином, щоби амплітуда прийнятого ультразвукового імпульсу залишалася постійною. Компенсація похибки вимірювання рівня, викликаної нерівномірною поверхнею контрольованого середовища, виконується за значенням амплітуди фонового сигналу. Основним недоліком цього засобу вимірювання рівня середовищ з нерівномірною поверхнею є низька точність вимірювання рівня, обумовлена впливом на амплітуду фонового сигналу зміни висоти нерівномірності поверхні, зміни параметрів газового середовища. Задача, на вирішення якої направлена корисна модель, яка заявляється, полягає в підвищенні точності вимірювання рівня середовищ з нерівномірною поверхнею ультразвуковим пристроєм. Поставлена задача вирішується за рахунок того, що як і в аналогах, так і в запропонованій корисній моделі вимірювання рівня здійснюється за часом проходження ультразвуковим імпульсом подвійної відстані від п'єзокерамічного випромінювача до поверхні середовища та часом проходження ультразвуковим імпульсом подвійної відстані від п'єзокерамічного випромінювача до реперної пластини, а похибка, викликана нерівномірною поверхнею контрольованого середовища, компенсується в залежності від значення амплітуди фонового сигналу. Але на відміну від відомих ультразвукових пристроїв для вимірювання рівня, в запропонованій корисній моделі значення амплітуди фонового сигналу, за яким компенсується похибка, є результатом відповідної математичної обробки необхідної кількості визначених у процесі вимірювання рівня значень амплітуди фонового сигналу. Запропонована корисна модель складається з блока обчислення та індикації (БОІ), в якому відбувається математична обробка значень сигналів та розрахунок рівня контрольованого середовища, та блока управління датчиком (БУД), в якому, відповідно до прототипу, є блок визначення амплітуди сигналу для визначення амплітуди фонового сигналу та при визначенні часу проходження ультразвуковим імпульсом подвійної відстані від п'єзокерамічного випромінювача до поверхні контрольованого середовища та часу проходження ультразвуковим імпульсом подвійної відстані від п'єзокерамічного випромінювача до реперної пластини здійснюється зміна амплітуди випроміненого імпульсу в залежності від виміряного рівня таким чином, щоби амплітуда прийнятого ультразвукового імпульсу залишалася постійною. На кресленні наведена блок-схема корисної моделі, яка заявляється, де: 1 - мікроконтролер БОІ; 2 - блок перетворення сигналу БОІ 3 - блок пам'яті; 4 - блок індикації; 5 - блок перетворення сигналу БУД; 6 - мікроконтролер БУД; 7 - регульоване джерело імпульсів збудження; 8 - п'єзокерамічний випромінювач; 9 - реперна пластина; 1 UA 74227 U 5 10 15 20 25 30 35 40 45 50 55 60 10 - джерело опорної напруги; 11 - компаратор; 12 - блок визначення амплітуди сигналу; 13 - підсилювач; 14 - контрольоване середовище. Запропонована корисна модель ультразвукового пристрою для вимірювання рівня середовищ з нерівномірною поверхнею працює наступним чином. Після включення ультразвукового пристрою в роботу мікроконтролер БУД 6 видає управляючий сигнал на регулююче джерело імпульсів збудження (далі РДІЗ) 7, яке формує і видає одиничний імпульс з мінімальним значенням напруги на п'єзокерамічний випромінювач (далі ПКВ) 8. Одночасно обнуляється і включається лічильник тактових імпульсів (далі ЛТІ). При цьому ПКВ 8 генерує ультразвуковий імпульс такої амплітуди, щоби при його розповсюдженні у повітрі при нормальних умовах різниця між ультразвуковим сигналом UP (відбитим від реперної пластини (репера) 9, прийнятим та перетвореним ПКВ в електричний сигнал і підсиленим підсилювачем 13) і сигналом джерела опорної напруги UОП (далі ДОН) 10 дорівнювала б нулю. Різниця між цими сигналами визначається компаратором 11, перший вхід якого з'єднаний з підсилювачем 13, другий - з ДОН 10, а вихід - з мікроконтролером БУД 6. При роботі ультразвукового пристрою в середовищі, відмінному від повітря, або при роботі в повітрі з параметрами, відмінними від нормальних умов, відбитий сигнал UP від репера 9 може бути більшим або меншим сигналу UОП з ДОН 10. Якщо різниця сигналів UP-UОП=ΔUP на виході компаратора 11 більша або дорівнює нулю, то мікроконтролер 2 зупиняє ЛТІ і записує у пам'ять кількість відрахованих імпульсів NP і різницю сигналів ΔUP. Якщо різниця сигналів ΔUP менша нуля, то мікроконтролер зупиняє ЛТІ після досягнення кількості імпульсів NPmax, що відповідає часу проходження ультразвуковим імпульсом відстані, яка в 4 рази перевищує відстань від репера 9 до ПКВ 8 у повітрі при нормальних умовах. Мікроконтролер БУД 6 видає управляючий сигнал на РДІЗ 7, яке формує та видає на ПКВ 8 імпульс збудження UЗ.Р, який більший попереднього на ΔUЗ. Одночасно обнуляється та включається ЛТІ. Якщо мікроконтролер БУД 6 одержує різницю сигналів ΔUP, яка є більшою або дорівнює нулю до досягнення ЛТІ кількості імпульсів NPmax, то мікроконтролер БУД 6 зупиняє ЛТІ і записує в пам'ять кількість імпульсів NP, різницю сигналів ΔNP та управляючий сигнал для формування РДІЗ 7 імпульсу збудження UЗ.P. У противному разі мікроконтролер виконує попередню послідовність дій. На цьому закінчується перший етап роботи БУД ультразвукового пристрою - визначення відбитого сигналу від репера. Другий етап роботи БУД ультразвукового пристрою починається з того, що визначається величина відбитого сигналу від поверхні контрольованого середовища 14. Мікроконтролер БУД 6 обнуляє та включає ЛТІ, подає управляючий сигнал на РДІЗ 7, яке формує та подає на ПКВ 8 імпульс збудження UЗ.П, який більший попереднього імпульсу збудження UЗ.P на величину ΔUЗ. Ультразвукові імпульси (перший відбитий від репера 9, а другий від поверхні контрольованого середовища 14) приймаються та перетворюються ПКВ 8 відповідно в електричні сигнали UР та UП і підсилюються підсилювачем 13. Якщо різниця сигналів UП-UОП=ΔUП, на виході компаратора 11 стане більшою або дорівнює нулю, то мікроконтролер БУД 6 зупиняє ЛТІ і записує в пам'ять кількість імпульсів NП, різницю сигналів ΔNП та управляючий сигнал для формування РДІЗ 7 імпульсу збудження UЗ.П. Мікроконтролер БУД 6 сприймає сигнал на виході компаратора 11 як різницю сигналів ΔUП, більшу або рівну нулю, тільки коли значення ЛТІ більше, ніж NP, у двох випадках: 1. якщо мікроконтролер отримав попередню різницю сигналів з виходу компаратора, більшу 0, коли кількість імпульсів ЛТІ була менша, ніж NP; 2. якщо мікроконтролер отримав першу різницю сигналів з виходу компаратора, більшу 0, коли кількість імпульсів ЛТІ була більша, ніж NP. Якщо різниця сигналів ΔUП менша нуля, то мікроконтролер БУД 6 зупиняє ЛТІ після досягнення ним кількості імпульсів NПmах, яка відповідає часу проходження ультразвуковим імпульсом відстані, котра в 4 рази перевищує відстань, що вимірюється ультразвуковим пристроєм у повітрі при нормальних умовах і максимальній амплітуді імпульсу збудження UЗ.П. При цьому мікроконтролер БУД 6 записує у пам'ять величину управляючого сигналу для формування РДІЗ 7 імпульсу збудження UЗ.П. Після одержання мікроконтролером БУД 6 різниці сигналів ΔUП, яка більша або дорівнює нулю, та запису в пам'ять кількості імпульсів NП, мікроконтролер БУД 6 обнуляє та включає ЛТІ, і вмикає блок визначення амплітуди сигналу (далі БВАС) 12. Після досягнення ЛТІ значення кількості імпульсів 2NЇ, мікроконтролер зупиняє ЛТІ й записує в пам'ять значення амплітуди фонового сигналу UÔ, визначене БВАС 12. 2 UA 74227 U 5 10 15 Після визначення відбитого сигналу від репера UP та відбитого сигналу від поверхні UП контрольованого середовища БУД ультразвукового пристрою для вимірювання рівня середовищ з нерівномірною поверхнею переходить до циклічного режиму роботи. У цьому режимі роботи контролером БУД 6 аналізуються значення різниць сигналів ΔUP і ΔUП. Якщо одержані різниці сигналів ΔUP і ΔUП дорівнюють або близькі до нуля, то мікроконтролер БУД 6 передає в блок перетворення сигналу БУД 5 значення лічильника NP і NП та значення амплітуди фонового сигналу UÔ у вигляді двійкового коду та переходить до наступного циклу роботи. У блоці перетворення сигналу БУД 5 ці значення перетворюються у частотно-модульований сигнал, який відповідає стандарту BELL 202, та передаються до блока перетворення сигналу БОІ 2. Якщо різниці сигналів ΔUP чи ΔUП менші нуля, то мікроконтролер БУД 6 переходить до відслідковування відбитого сигналу від репера та вводить компенсацію на величину впливу зміни параметрів газового середовища. Одержані у вигляді частотно-модульованого сигналу значення NP, NП та UÔ перетворюються блоком перетворення сигналу БОІ 2 у двійковий код та передаються до мікроконтролера БОІ 1. Ці значення мікроконтролером БОІ 1 записуються у блоці пам'яті 3 у відповідні комірки. Після накопичення у блоці пам'яті 3 значень NÐ, NП та UÔ, що відповідають N=10 вимірюванням рівня (далі - пакет вимірювань), у мікроконтролері БОІ 1 для одержаного пакета розраховуються наступні параметри: 1 N 1 N N P i , N P N N Ї i N i 1 i 1 N P 20 де N N Ði - середнє значення кількості імпульсів ЛТІ N Ð для пакета з N=10 вимірювань; - i-те значення кількості імпульсів ЛТІ N Ð з пакета вимірювань; Ð - середнє значення кількості імпульсів ЛТІ N Ї для пакета з N=10 вимірювань; N Їi - i-те значення кількості імпульсів ЛТІ N Ї з пакета вимірювань; N Ї E 25 1 N 1 N U O i , D N 1 U O i E ˆ ˆ N i 1 i 1 2 , D , E E 3 , де E - середнє значення амплітуди фонового сигналу U ˆ для пакета з N=10 вимірювань; O D, σ - дисперсія та середнє квадратичне відхилення значення амплітуди фонового сигналу U O відповідно для пакета вимірювань; ˆ E a - дійсне значення амплітуди фонового сигналу U O для пакета вимірювань. ˆ 30 Одержанні значення N Ð , N Ї та E a записуються у блоці пам'яті 3, які використовуються мікроконтролері БОІ 1 для розрахунку відстані до контролюючої поверхні hП і рівня LX контрольованого середовища в апараті за формулами: 35 40 45 N Ї Eh , Lx=H-hП, Nð де hП - відстань від ПКВ 8 до поверхні контрольованого середовища 14; hP - задана відстань від ПКВ 8 до репера 9; E(h) - функція, що виражає залежність амплітуди фонового сигналу Е від висоти нерівномірності h. Значення амплітуди фонового сигналу Е розраховується у мікроконтролері БОІ 1 за наступними формулами: hЇ hÐ 2 2 E E0 E , E 0,2 E1 k1E 2 k 2E3 k 3E 2 4 2 де ΔE - середнє геометричне значення зміни амплітуди фонового сигналу; Е0=Е1=Еä - базове значення амплітуди фонового сигналу Е; ΔE1=Е2-Е1, ΔE2=Е3-Е2, ΔE3= Е4-Е3 та ΔE4= Е5-Е4 - відхилення амплітуд фонових сигналів Е2, Е3, Е4 та Е5 попередніх 4-х пакетів вимірювань; k1=Е1/Е2, k2=Е2/Е3 та k3=Е3/Е4 - коефіцієнти. При включенні ультразвукового пристрою мікроконтролером БОІ 1 приймається, що Еä=Е0=Е1=Е2=Е3=Е4=Е5, а при подальшому накопиченні значень амплітуд фонових сигналів для відповідних пакетів вимірювань відбувається наступне оновлення значень у блоці пам'яті 3: Е5=Е4, Е4=Е3, Е3=Е2, Е2=Е1, Е1=Е0,=Еä. 3 UA 74227 U 5 Розраховані значення hП і LX записуються мікроконтролером БОІ 1 в блок пам'яті 3 та передаються в блок індикації 4. Як видно з вищенаведеного, корисна модель, яка заявляється, дозволяє отримати закладені заявником технічні результати. Проведений аналіз патентної літератури показав, що корисна модель, яка заявляється, відповідає вимогам "новизна". ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею, який складається з блока обчислення та індикації та блока управління датчиком, що включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, яке з'єднане з п'єзокерамічним випромінювачем, а компаратор з'єднаний з джерелом опорної напруги, мікроконтролер - з блоком перетворення сигналу, а блок визначення амплітуди сигналу - з підсилювачем і мікроконтролером, який відрізняється тим, що мікроконтролер передає до блока перетворення сигналу значення амплітуди фонового сигналу та часу розповсюдження ультразвукового сигналу, де вони перетворюються у частотно-модульований сигнал, а мікроконтролер блока обчислення та індикації з'єднано з блоком індикації, пам'яті та блоком перетворення сигналу, який перетворює частотно-модульований сигнал від блока управління датчиком у відповідні значення амплітуди фонового сигналу та часу розповсюдження ультразвукового сигналу, виконує компенсацію похибки вимірювання рівня середовища з нерівномірною поверхнею за результатами математичної обробки заданої кількості визначених у процесі вимірювання рівня значень амплітуди фонового сигналу. 4 UA 74227 U Комп’ютерна верстка M. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюUltrasonic device for measurement of the level of media with non-uniform surfaces
Автори англійськоюStentsel Yosyp Ivanovych, Tomson Andrii Vladyslavovych, Shapovalov Oleksii Ivanovych, Litvinov Kostiantyn Anatoliiovych
Назва патенту російськоюУльтразвуковое устройство для измерения уровня сред с неравномерной поверхностью
Автори російськоюСтенцель Иосиф Иванович, Томсон Андрей Владиславович, Шаповалов Алексей Иванович, Литвинов Константин Анатолиевич
МПК / Мітки
МПК: G01F 23/28
Мітки: ультразвуковий, нерівномірною, пристрій, середовищ, рівня, поверхнею, вимірювання
Код посилання
<a href="https://ua.patents.su/7-74227-ultrazvukovijj-pristrijj-dlya-vimiryuvannya-rivnya-seredovishh-z-nerivnomirnoyu-poverkhneyu.html" target="_blank" rel="follow" title="База патентів України">Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею</a>
Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею
Номер патенту: 59060
Опубліковано: 10.05.2011
Автори: Євсюков Володимир Володимирович, Томсон Андрій Владиславович, Стенцель Йосип Іванович
МПК: G01F 23/28
Мітки: пристрій, рівня, поверхнею, середовищ, ультразвуковий, нерівномірною, вимірювання
Формула / Реферат:
Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею, що включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, яке з'єднане з п'єзокерамічним випромінювачем, при цьому компаратор з'єднаний з джерелом опорної напруги, мікроконтролер - з блоком обробки та індикації, а блок визначення амплітуди сигналу - з підсилювачем і...
Спосіб вимірювання рівня рідких середовищ і ультразвуковий рівнемір
Номер патенту: 82594
Опубліковано: 25.04.2008
Автори: Посошко Віктор Миколайович, Уваров Анатолій Якович, Лагода Дмитро Павлович, Мєтьолкін Максим Іванович
МПК: G01S 15/00, G01F 23/28
Мітки: вимірювання, спосіб, рівнемір, рівня, середовищ, рідких, ультразвуковий
Формула / Реферат:
1. Спосіб вимірювання рівня рідких середовищ, що заснований на використанні ультразвукових імпульсів, який відрізняється тим, що блок датчика живлять постійним струмом від блока електронного вимірювального по двопровідній лінії, а інформацію від блока датчика до блока електронного вимірювального передають по цій лінії у вигляді цифрового багаторозрядного коду, який формують за допомогою амплітудної модуляції струму, споживаного блоком датчика...
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 321
Опубліковано: 30.04.1999
Автори: Воронін Альберт Олексійович, Жуков Борис Володимирович, Андрієнко Юрій Олександрович, Спалек Юрій Михайлович, Зиков Віктор Володимирович, Черепков Олексій Іванович
МПК: G01F 23/28
Мітки: вимірювання, рідинних, середовищ, рівня, пристрій
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, що має вимірювальну трубу з акустичним випромінювачем зондуючого сигналу і приймачем акустичних сигналів, підсилювачі-формувачі зондуючого сигналу та сигналів, що приймаються, схему вимірювання часового - інтервалу, функціонально зв'язаного з рівнем, що вимірюється, та індикатор, який відрізняється тим, що вимірювальна труба вибирається з діаметром d < 1.22l, де l - довжина хвилі головної...
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 30475
Опубліковано: 15.11.2000
Автори: Жуков Борис Володимирович, Черепков Олексій Іванович, Спалек Юрій Михайлович, Андрієнко Юрій Олександрович, Воронін Альберт Олексійович
МПК: G01F 23/28
Мітки: середовищ, пристрій, рівня, вимірювання, рідинних
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, який містить вимірювальну трубу з акустичним випромінювачем зондуючого сигналу та першим приймачем акустичних сигналів, підсилювач - формувач зондуючих сигналів, підсилювач-формувач прийнятих сигналів, схему вимірювання часового інтервалу, функційно пов'язаного з вимірюємим рівнем та індикатор, що відрізняється тим, що до нього введений другий приймач акустичних сигналів, який розташовано...
Ультразвуковий пристрій для вимірювання концентрації компонентів рідинних середовищ
Номер патенту: 24450
Опубліковано: 17.07.1998
Автори: Мартиненко Іван Іванович, Адон'єв Євген Олександрович, Гончарова Діна Миколаївна, Яковлев Валерій Федорович
МПК: G01N 29/14, G01N 29/02
Мітки: компонентів, концентрації, середовищ, вимірювання, пристрій, рідинних, ультразвуковий
Формула / Реферат:
Ультразвуковое устройство для измерения концентрации компонентов жидких сред, содержащее последовательно соединенные генератор зондирующих импульсов, излучающий и приемный акустические преобразователи, усилитель-формирователь, а также триггер, схему задержки, датчик температуры, отличающееся тем, что оно снабжено акустической измерительной камерой, в специальных цилиндрических стойках которой расположены излучающий и приемный акустические...
Попередній патент: Спосіб вирощування сортів рицини на півдні україни
Наступний патент: Відбивач струму
Випадковий патент: Електромагнітна свічка запалювання