Прицільний комплекс для системи дубльованого керування вогнем танка
Номер патенту: 77433
Опубліковано: 15.12.2006
Автори: Охріменко Анатолій Григорович, Глущенко Анатолій Романович, Бурак Анатолій Васильович, Фролов Леонід Андрійович, Гордієнко Валентин Іванович, Семенов Валентин Олександрович, Власюк Володимир Васильович
Формула / Реферат
1. Прицільний комплекс для системи дубльованого керування вогнем танка, що містить приціл навідника (ПН) з незалежною двохплощинною стабілізацією лінії візування, танковий балістичний обчислювач (ТБО), датчик положення гармати (ДПГ), кінематично зв'язаний з стабілізатором озброєння танка, пульт керування командира (ПКК) і приціл командира з незалежною стабілізацією лінії візування у вертикальній площині, що містить гіростабілізатор (ГС), кінематично з'єднаний з головним дзеркалом (ГД) і датчиком положення головного дзеркала (ДПГД), вихід якого через ДПГ підключений до першого входу ТБО, телескопічну систему денного візирного каналу спостереження (ТСДК), перед якою розміщена шкала з прицільною маркою, і телескопічну систему нічного візирного каналу спостереження (ТСНК), оптичні осі яких паралельно проектуються на головне дзеркало, при цьому перший вихід ПКК підключений до входу гіростабілізатора, другий вихід - до входу ПН, а третій вихід - до керувальних входів ПН і ТБО, перший і другий виходи ПН через ТБО зв'язані зі стабілізатором озброєння танка, блок комутації (БК), лазерний далекомір командира (ЛДК), що утримує лазерний випромінювач (ЛВ), телескопічну систему (ТС), розташовану перед оптичним виходом лазерного випромінювача, фотоприймальний пристрій (ФПП), який розташовано перед оптичним входом ТСНК, блок електронний (БЕ), який забезпечує роботу ЛДК, механізм вивірення (MB), кінематично зв'язаний з ТСДК і ТС лазерного випромінювача, оптична вісь якого проектується на головне дзеркало паралельно оптичній осі ТСДК, при цьому перший і другий виходи БЕ ЛДК підключені, відповідно, до першого і другого входу БК, третій і четвертий вхід якого підключені, відповідно, до третього і четвертого виходу ПН, перший і другий вихід - до четвертого і п'ятого входу ТБО, а керувальний вхід БК підключений до третього виходу ПКК, який відрізняється тим, що в нього додатково введені блок керування (БУ), виконавчий двигун (ВД), тахогенератор (ТГ), датчик положення (ДП) ТСДК, потенціометр вивірення (ПВ), лімб зі шкалою та редуктор (Р), який кінематично зв'язаний з ВД, ТСДК, ТС, ТГ, лімбом та ДП, вихід якого підключений до першого входу БУ, до другого входу котрого підключений вихід ТГ, до третього входу БУ підключений вихід датчика ДКГН ПН, до четвертого входу БУ підключений ПВ, а вихід БУ підключений до ВД.
2. Прицільний комплекс за п. 1, який відрізняється тим, що передаточне число редуктора вибране із розрахунку забезпечення відпрацювання блоком керування сигналу від датчика ДКГН ПН, а діапазон кутових відхилень лінії візування приціла командира при переміщенні ТСДК складає не менше як 60 кутових хвилин.
Текст
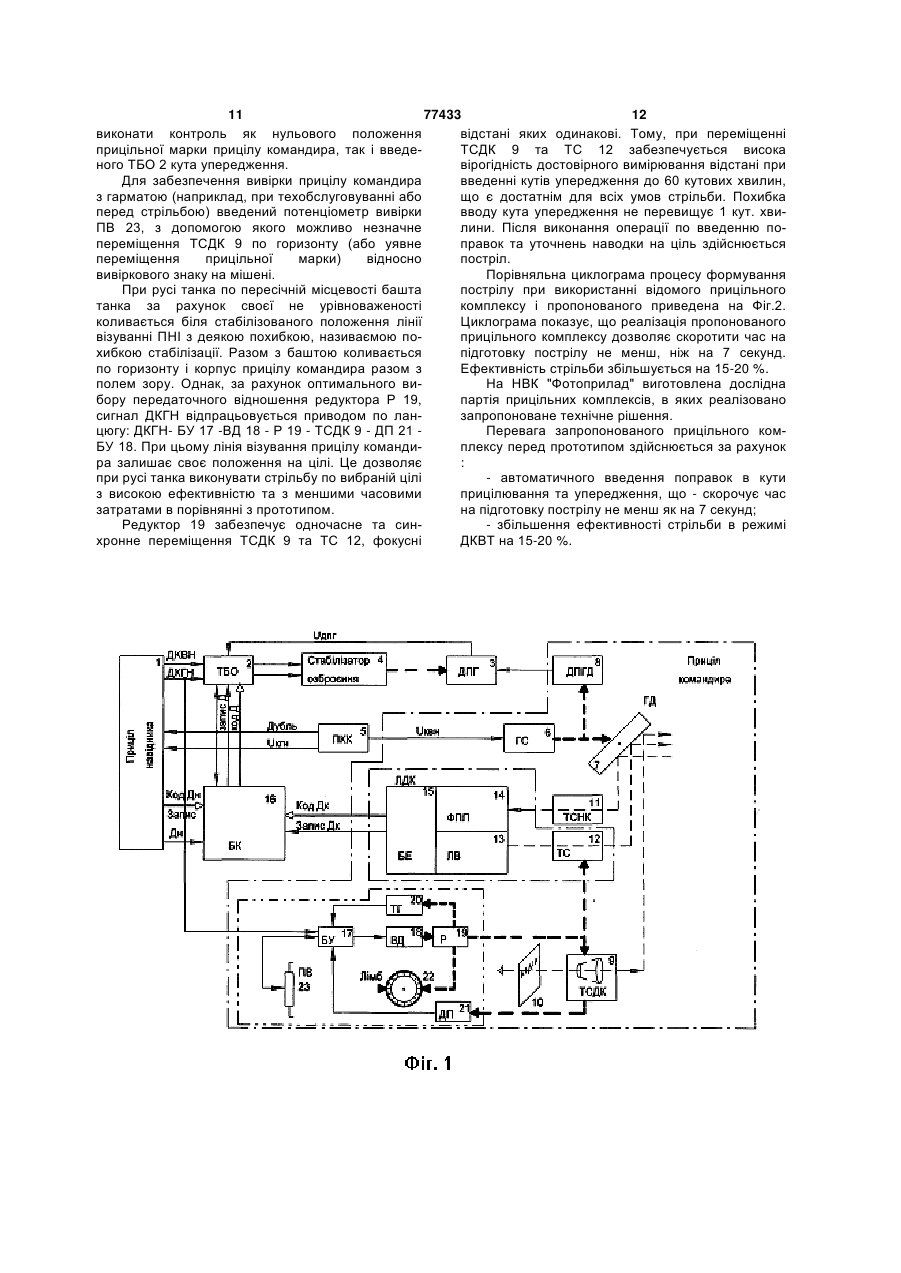
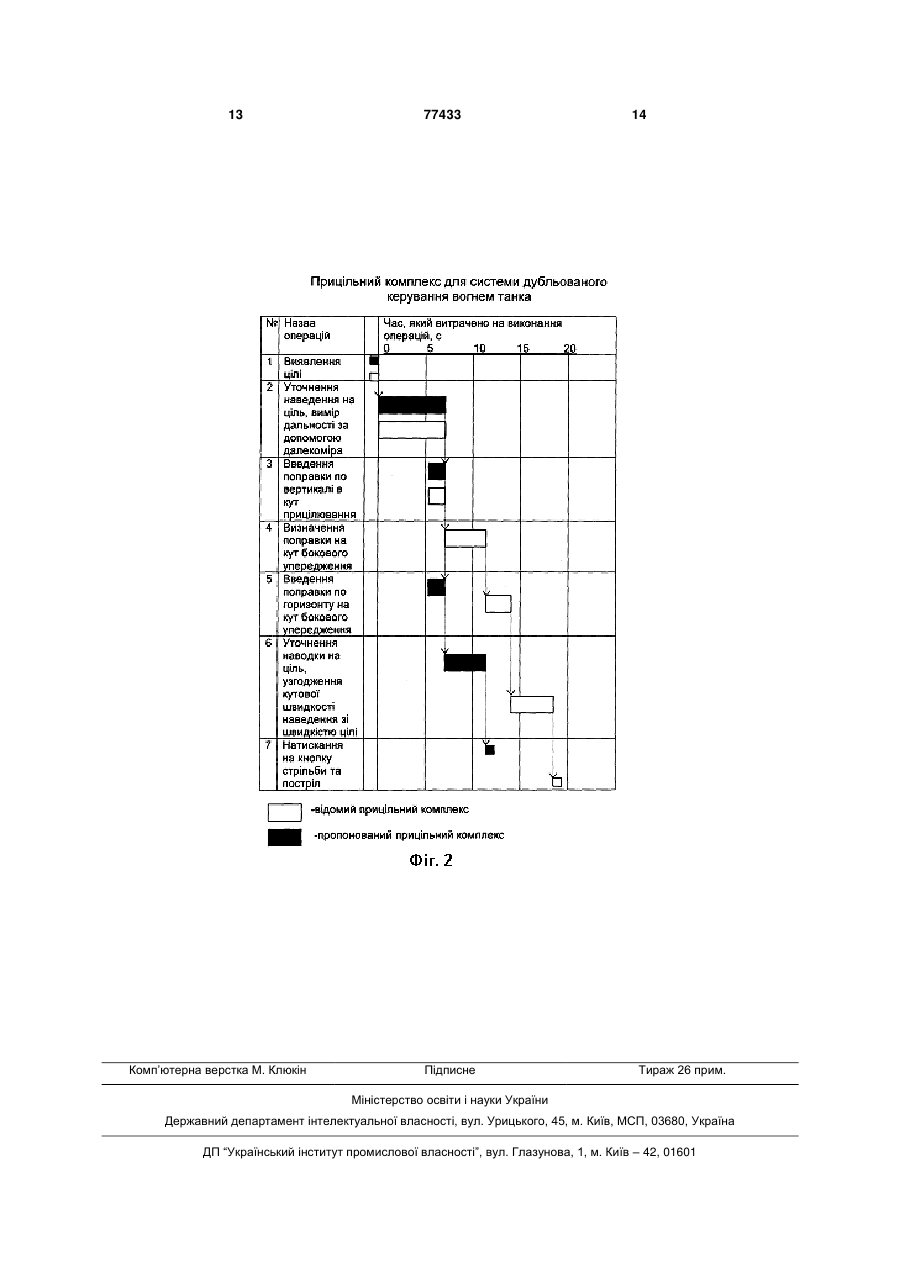
1. Прицільний комплекс для системи дубльованого керування вогнем танка, що містить приціл навідника (ПН) з незалежною двохплощинною стабілізацією лінії візування, танковий балістичний обчислювач (ТБО), датчик положення гармати (ДПГ), кінематично зв'язаний з стабілізатором озброєння танка, пульт керування командира (ПКК) і приціл командира з незалежною стабілізацією лінії візування у вертикальній площині, що містить гіростабілізатор (ГС), кінематично з'єднаний з головним дзеркалом (ГД) і датчиком положення головного дзеркала (ДПГД), вихід якого через ДПГ підключений до першого входу ТБО, телескопічну систему денного візирного каналу спостереження (ТСДК), перед якою розміщена шкала з прицільною маркою, і телескопічну систему нічного візирного каналу спостереження (ТСНК), оптичні осі яких паралельно проектуються на головне дзеркало, при цьому перший вихід ПКК підключений до входу гіростабілізатора, другий вихід - до входу ПН, а третій вихід - до керуваль C2 2 UA 1 3 77433 4 Прицільний комплекс містить приціл навідника Наведення гармати на ціль здійснюється шля(ПН) з незалежною двохплощинною стабілізацією хом сполучення центральної прицільної марки лінії візування та датчики кута горизонтального (ЦПМ) прицілу навідника з ціллю. При цьому під (ДКГН) і вертикального (ДКВН) наведення, танковпливом сигналів наведення по вертикалі і горивий балістичний обчислювач (ТБО), датчик полозонту гіроскопи гіростабілізатора прицілу ження гармати (ДПГ), кінематичне з'єднаний з навідника починають прецесувати і розвертати гарматою танка, пульт керування командира (ПКК) навколо осі коливання кінематичне зв'язані з ними і приціл командира з незалежною стабілізацією дзеркала, переміщуючи прицільну марку до цілі. лінії візування у вертикальній площині, що містить Одночасно ротори датчиків ДКВН і ДКГН також гіростабілізатор (ГС), кінематичне з'єднаний з горозвертаються, внаслідок чого виробляються сигловним дзеркалом (ГД) і датчиком кута вертикальнали Uдквн і Uдкгн, пропорційні кутам розлагодного наведення (ДКВН) головного дзеркала, вихід ження між лінією візування прицілу (центральною якого через ДПГ підключений до першого входу прицільною маркою) і віссю каналу ствола гармати ТБО, телескопічну систему денного візирного капо вертикалі і горизонталі. налу стеження (ТСДК) і телескопічну систему З виходу прицілу навідника сигнали Uдквн і нічного візирного каналу стеження (ТСНК), блок Uдкгн поступають в ТБО, який забезпечує ввід в комутації (БК), лазерний далекомір командира сигнали Uдквн і Uдкгн поправок U і U , (ЛДК), що утримує лазерний випромінювач (ЛВ), пропорційних, відповідно, кутам прицілювання і телескопічну систему (ТС), розташовану перед бокового упередження, які обчислюються в ТБО. оптичним виходом лазерного випромінювача, фоСумарні сигнали і з виходів ТБО поступають топриймальний пристрій (ФІШ), перед оптичним на входи приводів гармати і башти стабілізатора входом якого розташований ТСНК, блок електронозброєння танка і починають переміщувати гарманий (БЕ), який забезпечує роботу ЛДК, механізм ту у вертикальній площині, і башту (спільно з гарвивірки (MB), кінематичне з'єднаний з ТСДК і ТС матою) в горизонтальній площині в сторону зменлазерного випромінювача, оптична вісь якого шення кутів розлагодження, забезпечуючи проектується на головне дзеркало паралельно синхронне стеження гармати за ЦПМ прицілу оптичній осі ТСДК, при цьому перший вихід ПКК навідника. підключений до входу гіростабілізатора, другий Обчислення поправок U і U , пропорційних вихід - до входу ПН, а третій вихід - до керувалькутам прицілювання та бокового упередження, них входів ПН, ТБО і БК, перший і другий виходи ТБО здійснює після виміру наводчиком дальності ПН через ТБО зв'язані зі стабілізатором озброєння до цілі за допомогою лазерного далекоміра танка, перший і другий виходи БЕ ЛДК підключені, прицілу навідника. Значення коду дальності до цілі відповідно, до першого і другого входу БК, третій і поступає в ТБО, де з урахуванням введених четвертий входи якого підключені, відповідно, до вихідних даних обчислюються значення кутів третього і четвертого виходу ПН, перший і другий прицілювання і бокового упередження, забезпевиходи - до четвертого і п'ятого входу ТБО. чуючи кут підвищення гармати над лінією При керуванні вогнем танка від прицілу візування і кут повороту башти відносно лінії навідника стабілізація і наведення гармати у візування в напрямку, що залежить від кутової відомому комплексі здійснюється наступним чишвидкостіцілі, бокового вітру і крену осі цапф гарном. мати. Розворот гармати і башти здійснюється доПри русі танка по перерізуваній місцевості ти, поки датчики ДКВН і ДКГН не розвернуться на гіростабілізатор прицілу навідника зберігає задане кути прицілювання і бокового упередження, положення у просторі, забезпечуючи тим самим розраховані ТБО. При цьому центральна нерухомість поля зору візирного каналу прицілу прицільна марка (ЦПМ) прицілу навідника завжди навідника відносно цілі. залишається на цілі, забезпечуючи навіднику З корпусом гіростабілізатора прицілу можливість здійснити постріл відразу ж після навідника зв'язані ротори датчика кута вертикальвиміру дальності до цілі. ного наведення (ДКВН) і датчика кута горизонВ системі дубльованого керування вогнем тантального наведення (ДКГН) лінії візування. Статор ка (ДКВТ) у відомому прицільному комплексі датчика ДКГН кінематичне з'єднаний з корпусом стабілізація і наведення гармати здійснюється за прицілу навідника, а через нього - з баштою танка, допомогою прицілу командира у наступному поа статор датчика ДКВН через паралелограмний рядку. привід прицілу навідника кі-нематично зв'язаний з За сигналом включення дубльованого керугарматою. вання вогнем танка башточка командира, на якій Вказані датчики виробляють електричні сигнавстановлюється приціл командира, автоматично ли Uдквн і Uдкгн, пропорційні кутам розлагодженвстановлюється в певне ( узгоджене з баштою ня між лінією візування прицілу навідника і віссю танка) положення і жорстко стопориться на башту. каналу ствола гармати у вертикальній і При русі танка корпус прицілу командира разом із горизонтальній площинах. Сигнали Uдквн і Uдкгн танком здійснює подовжні кутові коливання у через ТБО надходять, відповідно, на входи вертикальній площині. приводів стабілізатора озброєння танка, які При цьому гіростабілізатор прицілу командира, переміщають, відповідно, гармату і башту танка в який кінематично зв'язаний з дзеркалом ГД, сторону зменшення кутів розлагодження датчиків забезпечує збереження головним дзеркалом ДКВН та ДКГН, здійснюючи стабілізацію гармати у незмінного положення у вертикальній площині. вертикальній та горизонтальній площині. 5 77433 6 Синхронно з ГД переміщується ротор датчика горизонталі розворотом башти танка, а по положення головного дзеркала (ДПГД), статор вертикалі - розворотом головного дзеркала якого жорстко з'єднаний з корпусом прицілу коприцілу командира. мандира. Датчик ДПГД виробляє сигнал, Після сполучення прицільної марки з обраною пропорційний куту повороту ГД відносно корпусу ціллю проводиться вимір дальності до цілі натисприцілу командира, який поступає на статор датканням кнопки виміру дальності. По сигналу "Зачика положення гармати (ДПГ). При цьому статор пуск" лазерний випромінювач формує лазерний датчика ДПГ жорстко зв'язаний з корпусом башти імпульс, який за допомогою телескопічної системи танка, а ротор кінематичне зв'язаний з гарматою. З і головного дзеркала направляється на обрану виходу ротора датчика ДПГ сигнал Uдпг, ціль. Відображений від цілі імпульс лазерного пропорційний куту розлагодження між напрямком випромінювання через головне дзеркало, гармати і лінією візування прицілу командира (потелескопічну систему ТСНК надходить на фотоложенням ГД, поступає в ТБО, де комутується на приймач, який перетворює його в електричний вхід приводу гармати стабілізатора озброєння тансигнал і забезпечує запис коду дальності в блок ка замість сигналу ДКВН, що надходить з прицілу комутації . Блок комутації, після зворотнього перенавідника. Привід гармати стабілізатора творення коду дальності (із послідовного коду в озброєння переміщує гармату в сторону зменшенпаралельний), комутує на перший вихід значення ня кута розлагодження датчика ДПГ, розвертаючи коду дальності, виміряне лазерним далекоміром при цьому ротор датчика ДПГ до мінімального сигприцілу командира, і формує імпульс запису налу Uцпг, який відповідає злагодженому полодальності "Імп. запис Дк", який з другого виходу женню гармати і лінії візування прицілу командира, блока комутації надходить на ТБО, забезпечуючи забезпечуючи тим самим стабілізоване положення запис коду дальності "Код Дк" в ТБО. гармати у вертикальній площині. ТБО з урахуванням введеного значення Наведення гармати на ціль у вертикальній дальності до цілі обчислює поправку на кут площині здійснюється за допомогою пульта керуприцілювання і вводить її в сигнал Uдпг, забезпевання командира . Сигнал, пропорційний куту чуючи піднімання гармати з допомогою відхилення пульта керування командира у стабілізатора озброєння на кут прицілювання. При вертикальній площині, поступає на вхід цьому положення прицільної марки прицілу когіростабілізатора прицілу командира. При цьому, мандира по вертикалі залишається нерухомим. переміщення гармати у вертикальній площині Таким чином здійснюється автоматичне ввездійснюється приводом гармати стабілізатора дення кута прицілювання при дубльованому озброєння від сигналу Uдпг, що виробляється даткеруванні вогнем танка. чиком ДПГ. Сигнал Uдпг, пропорційний куту розлаПоправка на кут бокового упередження ДКВТ годження між лінією візування (прицільною марвводиться командиром шляхом наведення на ціль кою) прицілу командира і віссю ствола гармати у відповідного штриха або трикутника шкали кутів вертикальній площині, формується за рахунок бокового упередження прицілу командира з допорозвороту гіростабілізатора і ротора датчика ДКВН могою пульта управління, при цьому ГД при наведенні прицільної марки прицілу команзабезпечується розворот башти з гарматою на дира у вертикальній площині. заданий кут бокового упередження. Після викоТаким чином здійснюється синхронне навенання операції по введенню кута бокового упедення прицільної марки прицілу командира і гарредження здійснюється постріл. мати у вертикальній площині, без створення ТБО Недоліками відомого прицільного комплексу поправки на кут прицілювання. при роботі в системі дубльованого керування воДля стабілізації і наведення гармати у гнем танка є: горизонтальній площині використовується контур - ручне введення кута бокового упередження, стабілізації башти від гіростабілізатора прицілу яке збільшує час на підготовку пострілу порівняно навідника. При цьому стабілізація і наведення з режимом керування вогнем танка за допомогою прицільної марки прицілу командира в прицілу навідника; горизонтальній площині забезпечується за рахунок - низька ефективність стрільби, яка зв'язана зі стабілізації і наведення башти танка від прицілу значними похибками введення кута упередження, навідника, оскільки башточка командира спільно з що пояснюється наступними причинами: а) прицілом командира при дубльованому керуванні неможливості врахування командиром реальних жорстко стопориться на корпусі башти. При цьому значень крену танка та бокового повітря, а також наведення прицільної марки прицілу командира і введення необхідної поправки в кут упередження; гармати на ціль в горизонтальній площині б) велика дискретність (1...2 мрад) нарізки здійснюється від пульта керування командира. шкал бокових упереджень приціла командира, що Сигнал, пропорційний куту відхилення пульта кене дозволяє ввести необхідне значення кута уперування в горизонтальній площині, поступає на редження; вхід каналу наведення по горизонту прицілу в) коливання прицільної марки приціла команнавідника. Подальша робота прицілу навідника і дира разом з баштою відносно цілі, що зменшує стабілізатора озброєння танка при роботі в режимі вірогідність достовірного виміру дальності. ДКВТ аналогічна режиму керування вогнем танка В основу винаходу поставлена задача вдосковід прицілу навідника. налення прицільного комплексу танка, в якому за Таким чином здійснюється наведення рахунок реалізації пропонованої системи дубльоприцільної марки прицілу командира і осі ваного керування вогнем танка забезпечується випромінювання лазерного далекоміра на ціль : по підвищення ефективності ведення стрільби за ра 7 77433 8 хунок підвищення ймовірності поразки цілі, що ованого керування вогнем танка вузлів автоматичрухається, та зниження часу на підготовку пострілу ного вводу в приціл командира кута бокового упепри стрільбі за допомогою прицілу командира. редження від сигналу ДКГН прицілу навідника; Для вирішення цієї задачі в прицільний ком- збільшення ефективності стрільби в режимі плекс, що містить приціл навідника (ПН) з незаДКВТ завдяки більш точного відпрацювання та лежною двоплощинною стабілізацією лінії вводу кута бокового упередження, який візування, танковий балістичний обчислювач виробляється ТБО і враховує всі (ТБО), датчик положення гармати (ДПГ), топометеобалістичні характеристики, що впливакінематичне зв'язаний з стабілізатором озброєння ють на точність стрільби. танка, пульт керування командира (ПКК) і приціл На Фіг.1 зображена структурна схема командира з незалежною стабілізацією лінії прицільного комплексу для системи ДКВТ. візування у вертикальній площині, що містить На Фіг.2 приведена циклограма процесу форгіростабілізатор (ГС), кінематичне з'єднаний з гомування пострілу при ДКВТ відомого прицільного ловним дзеркалом (ГД) і датчиком положення гокомплексу і пропонованого прицільного комплексу. ловного дзеркала (ДПГД), вихід якого через ДПГ Пропонований прицільний комплекс для сиспідключений до першого входу ТБО, телескопічну теми дубльованого керування вогнем танка (див. систему денного візирного каналу спостереження Фіг.1) містить приціл навідника (ПН) 1 з незалеж(ТСДК), перед якою розміщена шкала з ною двоплощинною стабілізацією лінії візування і прицільною маркою, і телескопічну систему нічного датчиками кута горизонтального (ДКГН) та вертивізирного каналу спостереження (ТСНК), оптичні кального (ДКВН) положення, танковий балістичний осі яких паралельно проектуються на головне обчислювач (ТБО) 2, датчик положення гармати дзеркало, при цьому перший вихід ПКК (ДПГ) 3, кінематичне зв'язаний з гарматою підключений до входу гіростабілізатора, другий стабілізатора озброєння 4 танка, пульт керування вихід - до входу ПН, а третій вихід - до керувалькомандира (ПКК) 5 і приціл командира з незалежних входів ПН і ТБО, перший і другий виходи ПН ною стабілізацією лінії візування у вертикальній через ТБО зв'язані зі стабілізатором озброєння площині, що містить гіростабілізатор (ГС) 6, танка, блок комутації (БК), лазерний далекомір кінематичне з'єднаний з головним дзеркалом (ГД) командира (ЛДК), що утримує лазерний 7 і датчиком положення головного дзеркала випромінювач (ЛВ), телескопічну систему (ТС), (ДПГД) 8 головного дзеркала, вихід якого через розташовану перед оптичним виходом лазерного ДПГ 3 підключений до першого входу ТБО 2, випромінювача, фотоприймальний пристрій (ФІШ), телескопічну систему денного візирного каналу який розташовано перед оптичним входом ТСНК, спостереження (ТСДК) 9 з розташованою перед блок електронний (БЕ), який забезпечує роботу нею прицільною шкалою 10 і телескопічну систему ЛДК, механізм вивірки (MB), кінематичне зв'язаний нічного візирного каналу спостереження (ТСНК) з ТСДК і ТС лазерного випромінювача, оптична 11. Лазерний далекомір командира (ЛДК) містить вісь якого проектується на головне дзеркало парателескопічну систему (ТС) 12, перед якою усталельно оптичній осі ТСДК, при цьому перший і новлений лазерний випромінювач (ЛВ) 13, фотодругий виходи БЕ ЛДК підключені, відповідно, до приймальний пристрій (ФПП) 14, який розташовапершого і другого входу БК, третій і четвертий ний після ТСНК 11 та блок електронний (БЕ) 15, в входи якого підключені, відповідно, до третього і якому розміщені електронні вузли, які забезпечучетвертого виходу ПН, перший і другий вихід - до ють роботу ЛДК та блок комутації (БК) 16. ТСДК 9 четвертого і п'ятого входу ТБО, а керувальний вхід та ТС 12 мають можливість переміщення від приБК підключений до третього виходу ПКК, додатковода, який містить блок управління (БУ) 17, виково введені блок управління (БУ), виконавчий двинавчий двигун (ВД) 18, редуктор (Р) 19, тахогенегун (ВД), тахогенератор (ТГ), датчик положення ратор (ТГ) 20, датчик положення (ДП) 21, лімб 22, (ДП) ТСДК, потенціометр вивірки (ПВ), лімб зі потенціометр вивірки (ПВ) 23. На фіг.1 поз. 17-23 шкалою та редуктор (Р), який кінематичне обведені штрих-пунктирною лінією. Виходи БЕ 15 зв'язаний з ВД, ТСДК, ТС, ТГ, лімбом та ДП, вихід підключені до першого та другого входів БК 16. якого підключений до першого входу БУ, до другоПерший вихід ПКК 5 підключений до входу ГС 6, го входу котрого підключений вихід датчика ДКГН другий вихід - до входу ПН 1, а третій вихід - до ПН, до четвертого входу БУ підключений ПВ, а керувальних входів ПН 1, ТБО 2 і БК 16, причому вихід БУ підключений до ВД. перший і другий виходи ПН 1 через другий і третій ПВ зміщає ТСДК та ТС ЛДК прицілу командира входи ТБО 2 зв'язані з першим і другим входом по горизонту в процесі вивірки. стабілізатора озброєння 4. До третього та четверОбертовий лімб показує значення введеного того входу БК 16 підключені третій та четвертий кута упередження. виходи ПНІ відповідно, перший та другий виходи Передатне число редуктора вибране із розрадо четвертого та п'ятого входів ТБО 2. Оптичні осі хунку забезпечення відпрацювання блоком ТСДК 11 та ТС 12 паралельно проектуються на управління сигналу від датчика ДКГН ПН, а головне дзеркало 7. діапазон кутових відхилень лінії візування прицілу Редуктор 19 кінематично з'єднаний з ВД 18, командира при переміщенні ТСДК складає не ТСДК 9, ТС 12, ТГ 20, ДП 21, лімбом 22. Виходи менше як 60 кутових хвилин. ДП 21 і ТГ 20 електричне підключені до першого та Досягненням технічного результату при другого входів БУ 17, до третього та четвертого використанні даного винаходу є: входів якого підключені виходи ДКГН прицілу - зменшення часу на підготовку пострілу за ранавідника 1 і ПВ 23, а вихід блока БУ 17 хунок введення в прицільний комплекс для дубльпідключено до ВД18. 9 77433 10 Блок комутації 16 виконує функції аналогічно переміщенням ГД 7 датчик ДПГД 8 виробляє сигпрототипу, блок електронний 15 умовно з'єднує нал, пропорційний куту повороту ГД 7, який надхофункції ряду блоків прототипа. дить на датчик ДПГ 3. З виходу датчика ДПГ З Всі вузли та блоки стандартні і використовусигнал Uдпг, пропорційний куту розлагодження між ються в складі приладів танка. положенням гармати і ГД 7 у вертикальній Керування вогнем танка з використанням проплощині, через ТБО 2 надходить на вхід приводу понованого прицільного комплексу (див. Фіг.1) гармати стабілізатора озброєння 4. Привід здійснюється наступним чином. стабілізатора озброєння 4 переміщує гармату по При керуванні вогнем танка з допомогою вертикалі в сторону зменшення кута розлагодженприцілу навідника 1 наведення гармати на ціль ня між датчиками ДПГ 3 і ДПГД 8, забезпечуючи забезпечується шляхом подачі через ТБО 2 на злагоджене положення гармати і ГД 7 (прицільної входи керування приводу гармати і башти марки прицілу командира) по вертикалі. Сигнал стабілізатора озброєння 4 , відповідно сигналів Uкгн з другого виходу ПКК 5 поступає на кутового положення ліній візування по висоті і нагіростабілізатор горизонтального наведення ПН 1, прямку. Ввід поправок на кути прицілювання і бопід впливом якого ПН 1 через ТБО 2 керує привокового упередження здійснюється після запису в дом стабілізатора озброєння 4, розвертаючи башТБО 2 значень коду дальності до цілі "Код Дн", що ту спільно з гарматою у необхідному напрямку. надходить через блок комутації 16 з третього вхоОдночасно з баштою розвертається і приціл коду прицілу навідника 1. Запис коду дальності в мандира, забезпечуючи сполучення його ТБО 2 відбувається при надходженні з четвертого прицільної марки з обраною ціллю по горизонту. виходу прицілу навідника 1 на п'ятий вхід ТБО 2 Таким чином здійснюється наведення через блок комутації 16 імпульсу запису дальності прицільної марки прицілу командира і осі "Запис Дн". При цьому ТБО 2 вводить поправки на випромінювання лазерного далекоміра на ціль : по кути прицілювання і бокового упередження, забезгоризонталі розворотом башти танка, а по печуючи відхилення гармати і башти танка від злавертикалі - розворотом головного дзеркала 7 годженого з лінією візування прицілу навідника 1 прицілу командира. положення на розраховані значення кутів Після сполучення прицільної марки з обраною прицілювання і бокового упередження, що ціллю проводиться вимір дальності до цілі натисдозволяє навідникові вести прицільну стрільбу по канням кнопки виміру дальності (на Фіг.1 не покаобраній цілі. зана). ЛВ 13 формує лазерний імпульс, який за При цьому приціл командира не має допомогою телескопічної системи 12 і ГД 7 можливості керувати гарматою і баштою, але направляється на обрану ціль. Відображений від забезпечується можливість виміру дальності до цілі імпульс ЛВ 13 через ГД 7 і ТСНК 11 надходить обраних цілей за допомогою автономного лазерна ФПП 14, а далі в БЕ 15, який перетворює його в ного далекоміра прицілу командира наступним електричний сигнал і передає по двопровідній лінії чином. в БК 16. БК 16 комутує на перший вихід значення З допомогою пульта керування командир коду дальності, виміряне ЛДК, і формує імпульс суміщає прицільну марку прицілу командира з обзапису дальності "Запис Дк", який з другого виходу раною ціллю і натискає кнопку виміру дальності, БК 16 надходить на ТБО 2, забезпечуючи запис яка запускає ЛВ 13. Імпульс ЛВ 13 через коду дальності "Код Дк" в ТБО 2. телескопічну систему 12 і головне дзеркало 7 ТБО 2 з урахуванням введеного значення направляється на вибрану ціль. Відображений від дальності до цілі та всіх топометео-балистичних цілі імпульс ЛВ через ТСНК 11 надходить на ФПП характеристик, що впливають на точність стрільби, 14. В момент надходження відображеного сигналу обчислює поправки на кути прицілювання та упевід цілі ФПП 14 перетворює його в цифровий код редження. Поправка на кут прицілювання дальності до цілі, який у вигляді десяткового зназабезпечує піднімання гармати з допомогою чення індикується на цифровому індикаторі (на стабілізатора озброєння 4. При цьому положення Фіг.1 не відображено). прицільної марки прицілу командира по вертикалі В системі (ДКВТ) прицільний комплекс працює залишається нерухомим. наступним чином. Поправка на кут бокового упередження (по гоВмикання системи ДКВТ здійснюється по сигризонту) вводиться також з допомогою налу "Дубль", який з третього виходу ПКК 5 надхостабілізатора 4 розворотом башти з гарматою на дить на керувальні входи ПН 1, ТБО 2 і БК 16. При заданий кут бокового упередження. При розвороті цьому забезпечується вимикання керування вобашти разом розвертається корпус прицілу комангнем танка від ПН 1. дира одночасно з зустрічним розворотом лінії Наведення гармати на ціль здійснюється за візування денного каналу прицілу командира. Це допомогою ПКК 5, який формує сигнал Uквн, забезпечується тим, що на виході ПН 1 пропорційний куту повороту пульта у вертикальній з'являється сигнал ДКГН, який подається в ТБО 2 площині, і сигнал Uкгн, пропорційний куту поворота в приціл командира на вхід БУ 17. Посилений та пульта у горизонтальній площині. Сигнал Uквн з сигнал ДКГН після БУ 17 зміщує ТСДК 9 та ТС 11 першого виходу ПКК 5 надходить на на кут упередження по ланцюгу: БУ 17 - ВД 18 - Р гіростабілізатор 6 прицілу командира. Під впливом 19 - ТСДК 9 - ДП 21 - БУ 17. Сигнал з тахогенерасигналу Uквн, пропорційно куту повороту пульта у тора ТГ 20, який подається на перший вхід БУ 17, вертикальній площині, гіростабілізатор 6 збільшує стійкість роботи приводу. розвертає ГД 7, зміщуючи прицільну марку у задаОбертання лімба 22 синхронно з зміщенням не положення по вертикалі. Синхронно з ТСДК 9 дозволяє візуально ( при необхідності) 11 77433 12 виконати контроль як нульового положення відстані яких одинакові. Тому, при переміщенні прицільної марки прицілу командира, так і введеТСДК 9 та ТС 12 забезпечується висока ного ТБО 2 кута упередження. вірогідність достовірного вимірювання відстані при Для забезпечення вивірки прицілу командира введенні кутів упередження до 60 кутових хвилин, з гарматою (наприклад, при техобслуговуванні або що є достатнім для всіх умов стрільби. Похибка перед стрільбою) введений потенціометр вивірки вводу кута упередження не перевищує 1 кут. хвиПВ 23, з допомогою якого можливо незначне лини. Після виконання операції по введенню попереміщення ТСДК 9 по горизонту (або уявне правок та уточнень наводки на ціль здійснюється переміщення прицільної марки) відносно постріл. вивіркового знаку на мішені. Порівняльна циклограма процесу формування При русі танка по пересічній місцевості башта пострілу при використанні відомого прицільного танка за рахунок своєї не урівноваженості комплексу і пропонованого приведена на Фіг.2. коливається біля стабілізованого положення лінії Циклограма показує, що реалізація пропонованого візуванні ПНІ з деякою похибкою, називаємою поприцільного комплексу дозволяє скоротити час на хибкою стабілізації. Разом з баштою коливається підготовку пострілу не менш, ніж на 7 секунд. по горизонту і корпус прицілу командира разом з Ефективність стрільби збільшується на 15-20 %. полем зору. Однак, за рахунок оптимального виНа НВК "Фотоприлад" виготовлена дослідна бору передаточного відношення редуктора Р 19, партія прицільних комплексів, в яких реалізовано сигнал ДКГН відпрацьовується приводом по ланзапропоноване технічне рішення. цюгу: ДКГН- БУ 17 -ВД 18 - Р 19 - ТСДК 9 - ДП 21 Перевага запропонованого прицільного комБУ 18. При цьому лінія візування прицілу командиплексу перед прототипом здійснюється за рахунок ра залишає своє положення на цілі. Це дозволяє : при русі танка виконувати стрільбу по вибраній цілі - автоматичного введення поправок в кути з високою ефективністю та з меншими часовими прицілювання та упередження, що - скорочує час затратами в порівнянні з прототипом. на підготовку пострілу не менш як на 7 секунд; Редуктор 19 забезпечує одночасне та син- збільшення ефективності стрільби в режимі хронне переміщення ТСДК 9 та ТС 12, фокусні ДКВТ на 15-20 %. 13 Комп’ютерна верстка М. Клюкін 77433 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAiming complex for system of tank fire dubbed control
Автори англійськоюHordienko Valentyn Ihorovych, Burak Anatolii Vasyliovych, Okhrimenko Anatolii Hruyhorovych, Semenov Valentyn Oleksandrovych, Frolov Leonid Andriiovych
Назва патенту російськоюПрицельный комплекс для системы дублированного управления огнем танка
Автори російськоюГордиенко Валентин Игоревич, Бурак Анатолий Васильевич, Охрименко Анатолий Григорьевич, Семенов Валентин Александрович, Фролов Леонид Андреевич
МПК / Мітки
Мітки: дубльованого, системі, прицільний, керування, комплекс, танка, вогнем
Код посилання
<a href="https://ua.patents.su/7-77433-pricilnijj-kompleks-dlya-sistemi-dublovanogo-keruvannya-vognem-tanka.html" target="_blank" rel="follow" title="База патентів України">Прицільний комплекс для системи дубльованого керування вогнем танка</a>
Прицільний комплекс для системи дубльованого керування вогнем танка
Номер патенту: 74226
Опубліковано: 15.11.2005
Автори: Гордієнко Валентин Іванович, Охріменко Анатолій Григорович, Мазурін Ігор Володимирович, Фролов Леонід Андрійович, Глущенко Анатолій Романович, Бормотов Василь Петрович, Хомченко Олексій Якович, Бурак Анатолій Васильович
Мітки: комплекс, дубльованого, прицільний, танка, керування, системі, вогнем
Формула / Реферат:
1. Прицільний комплекс для системи дубльованого керування вогнем танка, що містить приціл наводчика (ПН) з незалежною двоплощинною стабілізацією лінії візування, танковий балістичний обчислювач (ТБО), датчик положення гармати (ДПГ), кінематично зв'язаний з гарматою стабілізатора озброєння танка, пульт керування командира (ПКК) і приціл командира з незалежною стабілізацією лінії візування у вертикальній площині, що включає гіростабілізатор...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: керування, танка, вогнем, система
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Пристрій указання цілі для системи керування вогнем танка
Номер патенту: 49990
Опубліковано: 15.10.2002
Автори: Походняков Валерій Георгійович, Фролов Леонід Андрійович, Бондаренко Олександр Григорович
Мітки: указання, системі, вогнем, цілі, пристрій, танка, керування
Формула / Реферат:
1. Пристрій указання цілі для системи керування вогнем танка, що містить привід башти, блок керування приводом, прилад цілеуказання, пульт наведення, підсилювач наведення, гіростабілізатор, моментний двигун горизонтального наведення, датчик кута горизонтального наведення, схему горизонтального розвантаження, що включає підсилювач горизонтального розвантаження, датчик кута горизонтального розвантаження і моментний двигун горизонтального...
Система керування вогнем танка
Номер патенту: 51830
Опубліковано: 16.12.2002
Автори: Єрдаков Євген Володимирович, Бондаренко Олександр Григорович, Мошнін Віктор Миколайович, Хандога Анатолій Максимович
МПК: F41G 5/00
Мітки: вогнем, керування, танка, система
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, приціл, який складається з пульта керування, з'єднаного з приводом дзеркала прицілу, датчика кута вертикального наведення, датчика кута горизонтального наведення, які кінематично зв'язані з дзеркалом прицілу і відповідно з гарматою і баштою, балістичний обчислювач, блок керування приводами, гіротахометр вертикального наведення і гіротахометр горизонтального наведення,...
Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Руденко Микола Прохорович, Бусяк Юрій Митрофанович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: керування, система, вогнем, танка
Текст:
...з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і...
Попередній патент: Спосіб консервативної терапії зовнішнього ендометріозу і-іі ступенів у робітниць нафтопереробної промисловості
Наступний патент: Вузол секторів направляючого апарата турбіни у корпусі
Випадковий патент: Засіб із гепатопротекторною активністю