Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Руденко Микола Прохорович, Фролов Леонід Андрійович, Бусяк Юрій Митрофанович

Текст
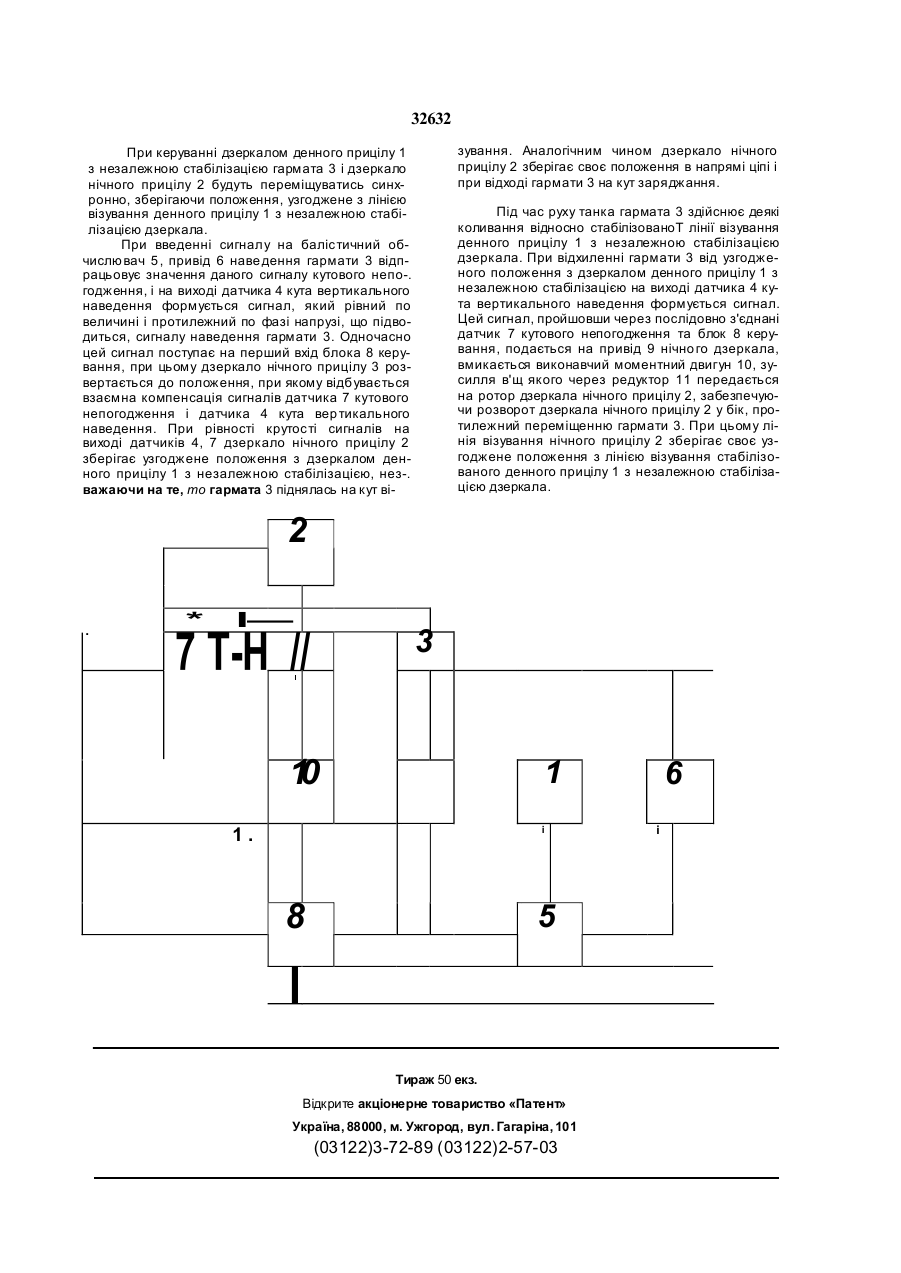
1. Система керування вогнем танка, що міс ти ть денний приціл з незалежною стабілізацією дзеркала, нічний приціл з дзеркалом і кінематич но з'єднані гармату та датчик кута вертикального наведення, який кінематично зв'язаний з дзерка лом денного приці лу, балі сти чний обчислюва ч, підключений до приводу наведення гармати, до першого та другого входів якого підключені ВІДПОВІДНО датчик кута вертикальною наведення та денний приціл, яка відрізняється тим, що в не ї введені датчик куто вого непогодження нічного прицілу з гарматою, блок керування зв'язаний •першим входом з датчиком кутового непогодження, другим входом - з датчиком кута вертикального наведення, а третім входом - з приводом наведення гармати. 2. Система кер ування за п 1, яка відрізняється тим, що блок керування виконаний у вигляді су матора 3. Система кер ування за п.1 , яка відрізняється тим, що привід дзеркала нічного прицілу місти ть викона вчий момен тний дви гун і редук тор , пр и цьому вихід блока керування підключений до ви конавчого моментного двигуна , а редуктор кіне матично зв'язаний з дзеркалом нічного прицілу та датчиком кутового непогодження. CM О Винахід стосується бронетанкової техніки. Найбільш близькою до винаходу, що заявляється, по технічній суті є система керування вогнем удосконаленого танка Т-80. Ця система містить денний приціл з незалежною стабілізацією дзеркала, нічний приціл з дзеркалом і кінематично з'єднані гармату та датчик кута вертикального наведення, який кінематично з'єднаний з дзеркалом денного прицілу, балістичний обчислювач, підключений до приводу наведення гармати, до першого та друго го входів якого підключені датчик кута вертикального наведення та денний приціл. Нічний приціл у горизонтальній площині жорстко закріплений на башті, а у вертикальній площині зв'язаний з гарматою системою важелів і тяг. При увімкненому денному прицілі з незалежною стабілізацією дзеркала з датчиків горизонтального та вертикального наведення на вхід балістичного обчислювача поступають сигнали керування приводом наведення гармати. З урахуванням вироблених обчислювачем сигналів кутового непогодження та попередження забезпечується наведення гармати на ціль. Під час робо ти в нічни х умовах додатково вмикається нічний приціл, керування яким здійснюється аналогічно роботі денного прицілу з незалежною стабілізацією дзеркала. У відомій системі керування вогнем танка узгодження лінії візування нічного прицілу з лінією візування денного прицілу з незалежною стабілізацією дзеркала повністю співпадає з описом аналога Наявність жорсткого зв'язку викликає появу сигналів, що постійно змінюються на виході балістичного обчислювача, які негативно впливають на швидкодію роботи приводу наведення гармати, оскільки він не поспіває відпрацьовувати сигнали з виходів датчиків горизонтального та вертикального наведення. Тому введення значень кутів наведення на ціль здійснюється на нічному прицілі вручну, що негативно позначається на швидкодії усієї системи керування вогнем танка через збільшення часу на підготовку пострілу, що веде до втрат точності та ефективності стрільби в нічних умовах. Крім цього, такий жорсткий зв'язок нічного прицілу з гарматою під час руху танка по сильнопересіченій місцевості викликає зміну лінії візування нічного прицілу відносно CM го ш CO о? 32632 центру цілі, так як гармата сприймає збурювальні моменти складок місцевості і коливається в межах положення стабілізації. В результаті потрібний додатковий час для приведення системи у стан, при якому можливе прицільне стріляння з ходу, а це негативно позначається на її швидкодії. В основу винаходу поставлено задачу удосконалення системи керування вогнем танка, в якому шляхом введення нових вузлів (блок керування та виконавчий моментнии двигун, зв'язаний з дзеркалом нічного прицілу) та нових зв'язків * між новими та відомими блоками забезпечується зменшення часу готовності системи для прицільної стрільби в нічних умовах, отже, підвищується швидкодія системи в цілому. Поставлена задача вирішується тим, що у відому систему керування вогнем танка, що містить денний приціл з незалежною стабілізацією дзеркала, н.'чний приціл з дзеркалом та кінематично сполучені гармату та датчик кута вертикального наведення, який кінематично зв'язаний з дзеркалом денного прицілу, балістичний обчислювач, підключений до приводу наведення гармати, до першого та другого входів якого підключені відповідно датчик кута вертикального наведення та денний приціл, згідно з винаходом, введені датчик кутового непогодження нічного прицілу з гарматою, блок керування та привід дзеркала нічного прицілу, причому блок керування, зв'язаний першим входом з датчиком кутового непогодження, другим входом з датчиком кута вертикального наведення, а третім входом з приводом наведення гармати. Крім того, блок керування виконаний у вигляді суматора. Додатковою відміною від прототипу є також те, що привід дзеркала нічного прицілу містить виконавчий моментнии двигун і редуктор, при цьому ви хід блока керування підключений до виконавчого моментного двигуна, а редуктор кіне- • матично зв'язаний з дзеркалом нічного прицілу та датчиком кутового непогодження. Введення нових ознак у взаємозв'язку з відомими ознаками дозволяє суттєво знизити інтервал часу, необхідний для точного узгодження положення дзеркала нічного прицілу відносно лінії візування денного прицілу з незалежною стабілізацією дзеркала. Застосування нового контуру регулювання, що містить датчик кутового непогодження, блок керування та виконавчий моментнии двигун, у взаємозв'язку з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і швидкодії, але і сформувати на виході блока керування середньозважений сигнал узгодження. Цей сигнал враховує дані вихідного сигналу балістичного обчислювача, що знімаються з виходу приводу наведення гармати і подаються на вхід блока керування. У цьому середньозваженому коректувальному сигналі є інформація, яка враховує, поряд з різницевими сигналами датчиків непогодження, ряд інших параметрів (швидкість руху, танка, швидкість вітру і т.п ). Подача цього середньозваженого сигналу на виконавчий моментнии двигун дозволяє ввести поправки у напрям лінії візування нічного прицілу та осі каналу ствола гармати і тим самим у два рази зменшити час на підготовку пострілу в нічни х умовах, а отже, підвищити швидкодію системи в цілому. Суть винаходу пояснюється кресленням, на якому представлена блок-схема системи керування вогнем танка, що пропонується. Система керування вогнем танка містить денний приціл 1, з незалежною стабілізацією дзеркала, нічний приціл 2 з дзеркалом та кінематично з'єднані гармату 3 та датчик 4 кута вертикального наведення. Датчик 4 кута вертикального наведення кінематично зв'язаний з дзеркалом денного прицілу 1 Балістичний обчислювач 5 підключений до приводу 6 наведення гармати 3. До першого та другого входів балістичного обчис-" лювача 5 підключені відповідно датчик 4 кута вертикального наведення та денний приціл 1 з незалежною стабілізацією. Датчик 7 кутового непогодження нічного прицілу І з гарматою 3 через блок 8 керування зв'язаний з приводом 9 дзеркала нічного прицілу. Блок 7 керування зв'язаний першим входом з датчиком 7 кутового непогодження, другим входом з датчиком 4 кута вертикального наведення, а третім входом з приводом 6 наведення гармати. Бпок 8 керування виконаний у ви гляді суматора. Привід 9 дзеркала нічного прицілу містить виконавчий моментнии двигун 10 і редуктор 11. Вихід блока 8 керування підключений до виконавчого моментного двигуна 10, який через редуктор 11 кінематично зв'язаний з дзеркалом 2 нічного прицілу та датчиком 7 кутового непогодження. Усі вузли, що використовуються в системі, та блоки стандартні й використовуються для танків Т-80 УД, що випускаються серійно. Система працює таким чином. При вмиканні системи і при відсутності коректувальних сигналів, що виробляються балістичним обчислювачем 5, положення гармати З узго джене з лінією віз ування денного прицілу 1 з незалежною стабілізацією дзеркала. На ви хрді датчика 4 кута вертикального наведення, за сигналом якого вмикається привід 6 наведення гармати 3, напр уга си гналу дорі внює н улю. Напрям осі каналу ство ла гарма ти 3 та нічно го прицілу 2 з дзеркалом також узгоджене з лінією віз ування денно го прицілу 1 з вертикальною стабілізацією завдяки сигналу, що знімається з виходу датчика 7, куто вого непогодження дзеркала нічного прицілу 2. Цей си гнал, проходя чи через блок 8 кер ування, подається на привід 9 дзеркала нічного прицілу 2, вмикається виконавчий моментнии двигун 10, який через редуктор 11 і систему тя г (на кресленні не предста влені) передає оберта льний момент ротор у (на кресленні не представлений) датчика 7 куто вого непого дження і розвертає дзеркало нічно го прицілу 2 до ти , поки на ви ході датчика 7 к уто вого непогодження, з'єднаного з другим входом блока 8 керування , напр уга сигна лу не стане рівною нулю. 32632 зування. Аналогічним чином дзеркало нічного прицілу 2 зберігає своє положення в напрямі ціпі і при відході гармати 3 на кут заряджання. При керуванні дзеркалом денного прицілу 1 з незалежною стабілізацією гармата 3 і дзеркало нічного прицілу 2 будуть переміщуватись синхронно, зберігаючи положення, узгоджене з лінією візування денного прицілу 1 з незалежною стабілізацією дзеркала. При введенні сигналу на балістичний обчислювач 5 , привід 6 наве дення гармати 3 відпрацьовує значення даного сигналу кутового непо-. годження, і на виході датчика 4 кута вертикального наведення формується сигнал, який рівний по величині і протилежний по фазі напрузі, що підводиться, сигналу наведення гармати 3. Одночасно цей сигнал поступає на перший вхід блока 8 керування, при цьому дзеркало нічного прицілу 3 розвертається до положення, при якому відбувається взаємна компенсація сигналів датчика 7 кутового непогодження і датчика 4 кута вер тикального наведення. При рівності крутості сигналів на виході датчиків 4, 7 дзеркало нічного прицілу 2 зберігає узгоджене положення з дзеркалом денного прицілу 1 з незалежною стабілізацією, нез-. важаючи на те, то гармата 3 піднялась на кут ві Під час руху танка гармата 3 здійснює деякі коливання відносно стабілізованоТ лінії візування денного прицілу 1 з незалежною стабілізацією дзеркала. При відхиленні гармати 3 від узгодженого положення з дзеркалом денного прицілу 1 з незалежною стабілізацією на виході датчика 4 кута вертикального наведення формується сигнал. Цей сигнал, пройшовши через послідовно з'єднані датчик 7 кутового непогодження та блок 8 керування, подається на привід 9 нічно го дзеркала, вмикається виконавчий моментний двигун 10, зусилля в'щ якого через редуктор 11 передається на ротор дзеркала нічного прицілу 2, забезпечуючи розворот дзеркала нічного прицілу 2 у бік, протилежний переміщенню гармати 3. При цьому лінія візування нічного прицілу 2 зберігає своє узгоджене положення з лінією візування стабілізованого денного прицілу 1 з незалежною стабілізацією дзеркала. 2 * І— 7 Т-Н // 3 І 1 0 1 1. і 8 5 І Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122)3-72-89 (03122)2-57-03 6 і
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for tank fire control
Автори англійськоюRudenko Mykola Prokhorovych, Frolov Leonid Andriiovych, Busiak Yurii Mytrofanovych
Назва патенту російськоюСистема управления огнем танка
Автори російськоюРуденко Николай Прохорович, Фролов Леонид Андреевич, Бусяк Юрий Митрофанович
МПК / Мітки
МПК: F41G 5/00
Мітки: танка, вогнем, керування, система
Код посилання
<a href="https://ua.patents.su/4-32632-sistema-keruvannya-vognem-tanka.html" target="_blank" rel="follow" title="База патентів України">Система керування вогнем танка</a>
Система для гідропневматичної очистки стекол оглядових приладів командирської башточки танка
Номер патенту: 29545
Опубліковано: 15.11.2000
Автори: Руденко Микола Прохорович, Фролов Леонід Андрійович
МПК: B60S 1/06, B60S 1/46, F41H 5/00
Мітки: гідропневматичної, приладів, очистки, командирської, система, стекол, танка, оглядових, башточки
Текст:
...вхо ду електpопpивода командиpської башточки, а дpугий вихiд – до кеpуючих входiв 2 29545 пеpшого, дp уго го та тpетього ключiв, пpи цьому вихiд суматоpа з'єднаний з тpетiм входом електpопpивода командиpської башточки, пеpший вхiд суматоpа з'єднаний з фоpмувачем зони нечутливостi, дp угий вхiд якого чеpез пеpший ключ пiдключений до пеpшого вихо ду пульта кеpування, вхiд фа зочутливого пiдсилювача пiдключений до виходу датчика положення...
Система гідропневмоочистки стекол оглядових приладів командирської башточки танка
Номер патенту: 29548
Опубліковано: 15.11.2000
Автори: Оробинський Василь Миколайович, Руденко Микола Прохорович, Ісаєв Володимир Васильович, Фролов Леонід Андрійович
Мітки: оглядових, командирської, гідропневмоочистки, башточки, стекол, приладів, система, танка
Текст:
...круговий огляд при будь-яких запиленості та забрудненні, які мають місце в реальних умовах експлуа тації об'єкта, що підви щує ві рогідність виявлення цілей на полі бою, підвищує живучість танка та ефективність його ви користання. Суть ви нахо ду пояснюється кресленням, на якому представлена схе ма системи гідропневмоочистки з конструкцією приймального та передавального пристроїв. Систе ма гідропневмоочистки стекол оглядових приладів 1...
Система керування процесом розкладки та віджимання білизни
Номер патенту: 28700
Опубліковано: 16.10.2000
Автори: Ройзман Вілен Петрович, Чоловський Роман Генадійович, Малигін Олександр Вікторович
МПК: D06F 37/00, D06F 33/02
Мітки: білизни, керування, розкладки, віджимання, процесом, система
Формула / Реферат:
Система керування процесом розкладки та віджиму білизни, яка містить командоапарат, яка відрізняється тим, що додатково введено таймер паузи А1, таймер розкладки А2 та датчик вібрацій ДВ.
Система керування механізованим заряджанням
Номер патенту: 32618
Опубліковано: 15.02.2001
Автори: Кас'ян Валерій Іванович, Коробейніков Олег Павлович, Петраченко Любов Парфенівна, Бестік Микола Іванович, Бакушин Анатолій Олексійович
Мітки: система, заряджанням, механізованим, керування
Текст:
...насосна установка 3 у вигляді гідронасосу, золотникової коробки, поповнюючого , баку та шлангів, описана на стор.100...106; - пристрій 4 ви давання снаряду в площин у заряджання містить конвеєр з лотками для снаря дів зі стопором і ме ханізмом повороту , золотни ком стопору, гідромотором і електромагнітом, описаний на стор 84...87, 100...107; - пристрій 5 стопоріння гармати на куті заряжання у вигляді гідромеханічного стопору гармати,...
Рекламний пристрій “демо-дзеркало” і система керування люмінесцентними лампами рекламного пристрою
Номер патенту: 590
Опубліковано: 16.10.2000
Автори: Омєльчєнко Алєксандр Сєргєєвіч, Костигін Ігорь Арнольдовіч, Вєснік Євгєній Євгєньєвіч
МПК: G09F 13/12
Мітки: система, рекламний, рекламного, лампами, керування, демо-дзеркало, пристрій, люмінесцентними, пристрою
Формула / Реферат:
1. Рекламний пристрій, що містить основу, виконану у вигляді плоскої металевої коробчастої конструкції, на фасаді якої за допомогою петель закріплено дзеркальне скло, яке має певну світлопроникність, а всередині розташовано, принаймні, два світлових короби, кожний з яких забезпечено люмінесцентним джерелом світла, сполученим з єдиною системою керування, і засіб для розміщення рекламних слайдів між джерелом світла і дзеркальним склом, який...
Попередній патент: Змішувач
Наступний патент: Пристрій технічного діагностування цифрових об’єктів діагнозу зі складною внутрішньою структурою
Випадковий патент: Антифрикційний матеріал для холодної обробки металів тиском