Спосіб програмного управління тепловим об’єктом з застосуванням широтно-імпульсної модуляції
Номер патенту: 81276
Опубліковано: 25.06.2013
Автори: Вискребенцев Віктор Олегович, Гапон Анатолій Іванович, Савицький Сергій Михайлович, Євсеєнко Олег Миколайович, Качанов Петро Олексійович

Формула / Реферат
Спосіб програмного управління тепловим об'єктом з застосуванням широтно-імпульсної модуляції (ШІМ), що включає формування коду температури задатчика, вимірювання температури об'єкта і формування управляючої дії у вигляді ШІМ, управляючу дію формують як послідовність прямокутних імпульсів різної довжини, при відомому значенні управляючої дії, вимірюють вихідні сигнали і по ним визначають перехідну характеристику об'єкта, по якій визначають суму кодів приростів температури до кінця інтервалу програмного регулювання, обумовлених відповідними прямокутними імпульсами, визначають прогнозовану помилку розузгодження як різницю між отриманою сумою, відповідною управляючої дії для цього ж моменту часу, і кодом приросту температури задатчика, корегують її на величину помилки розузгодження, що мала місце на початок інтервалу програмного регулювання, а управляючу дію формують у вигляді суми скоректованої помилки розузгодження і управляючої дії на попередньому інтервалі програмного регулювання, який відрізняється тим, що вимірюють температуру об'єкта у всіх n точках теплового поля і формують управляючу дію для теплового об'єкта з застосуванням широтно-імпульсної модуляції (ШІМ).
Текст
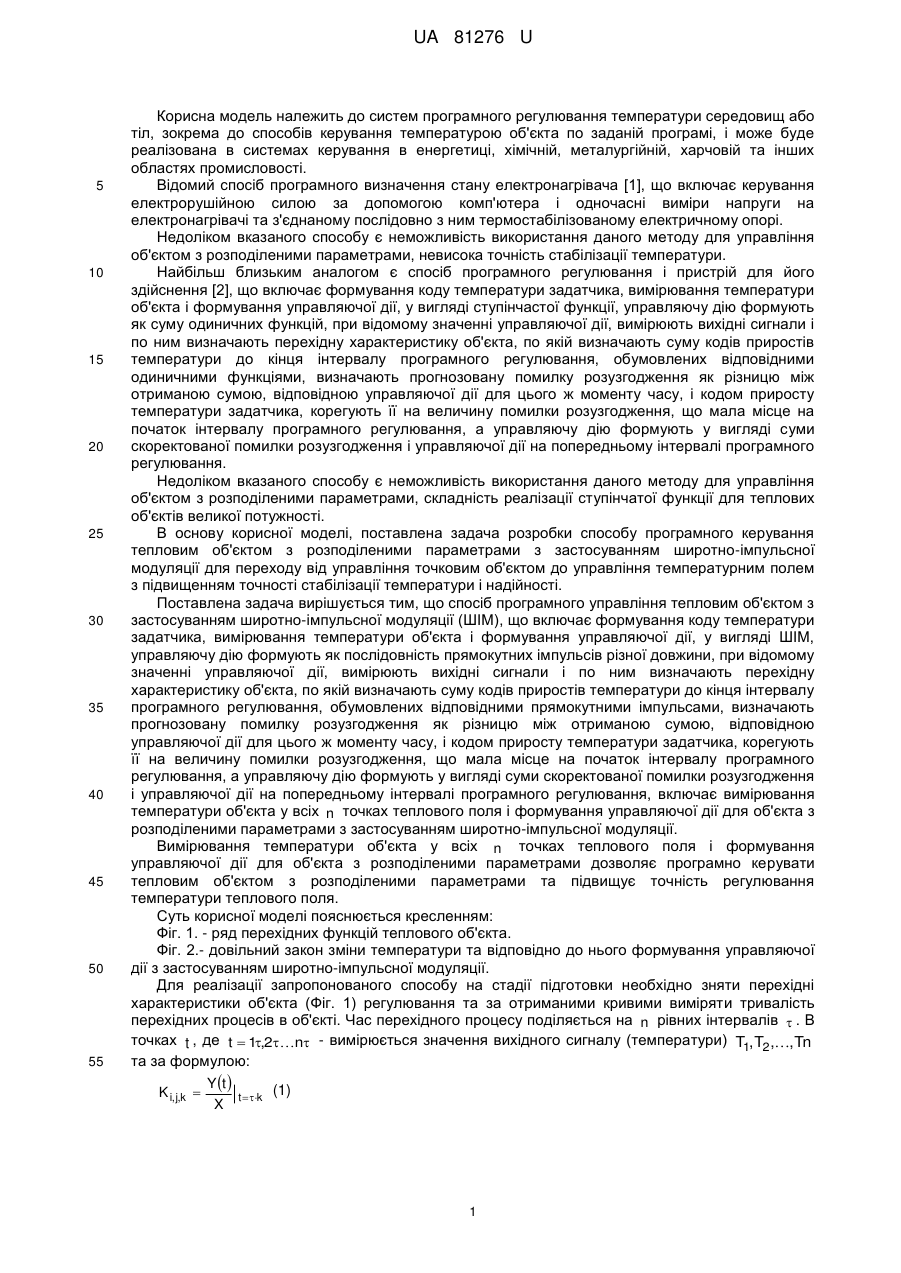
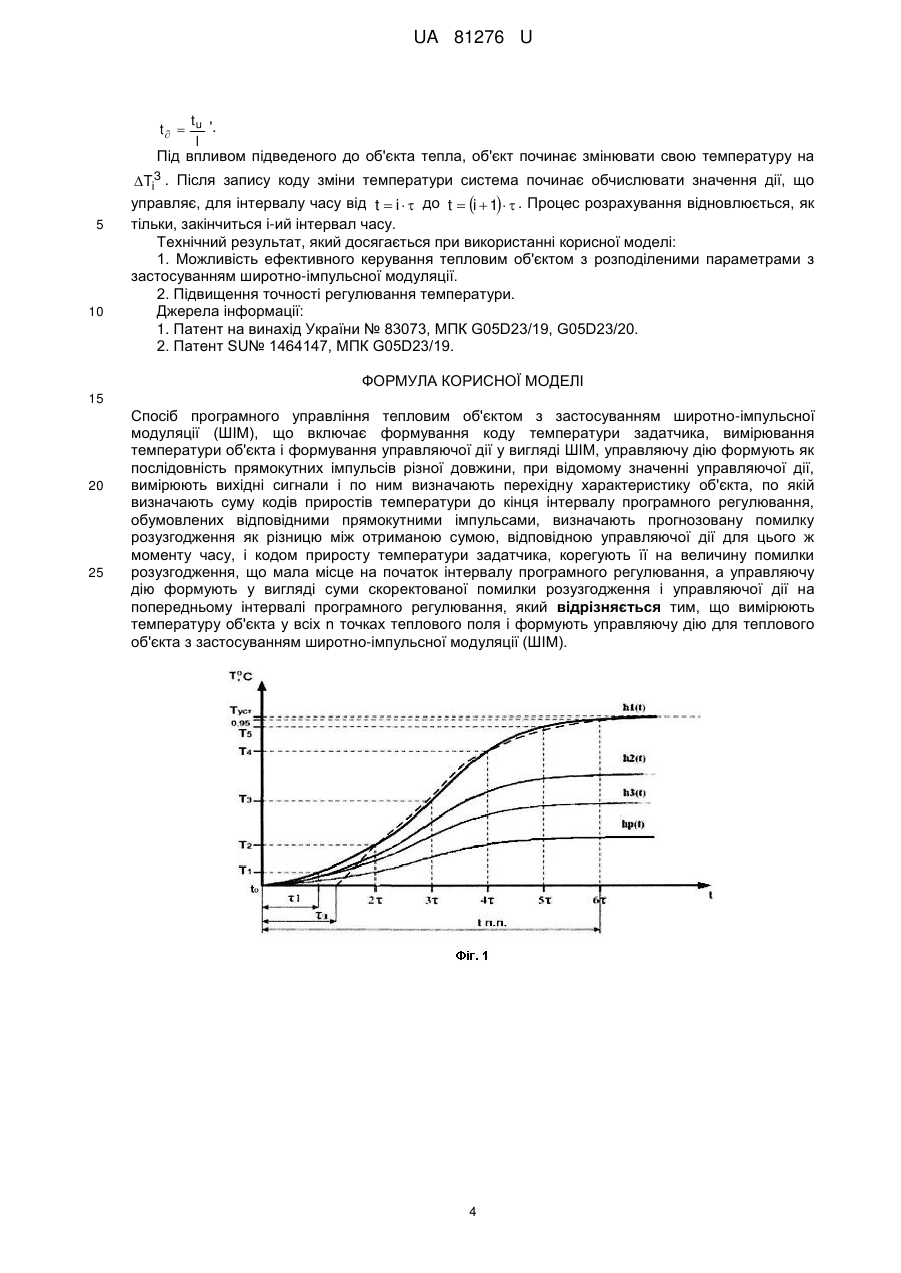
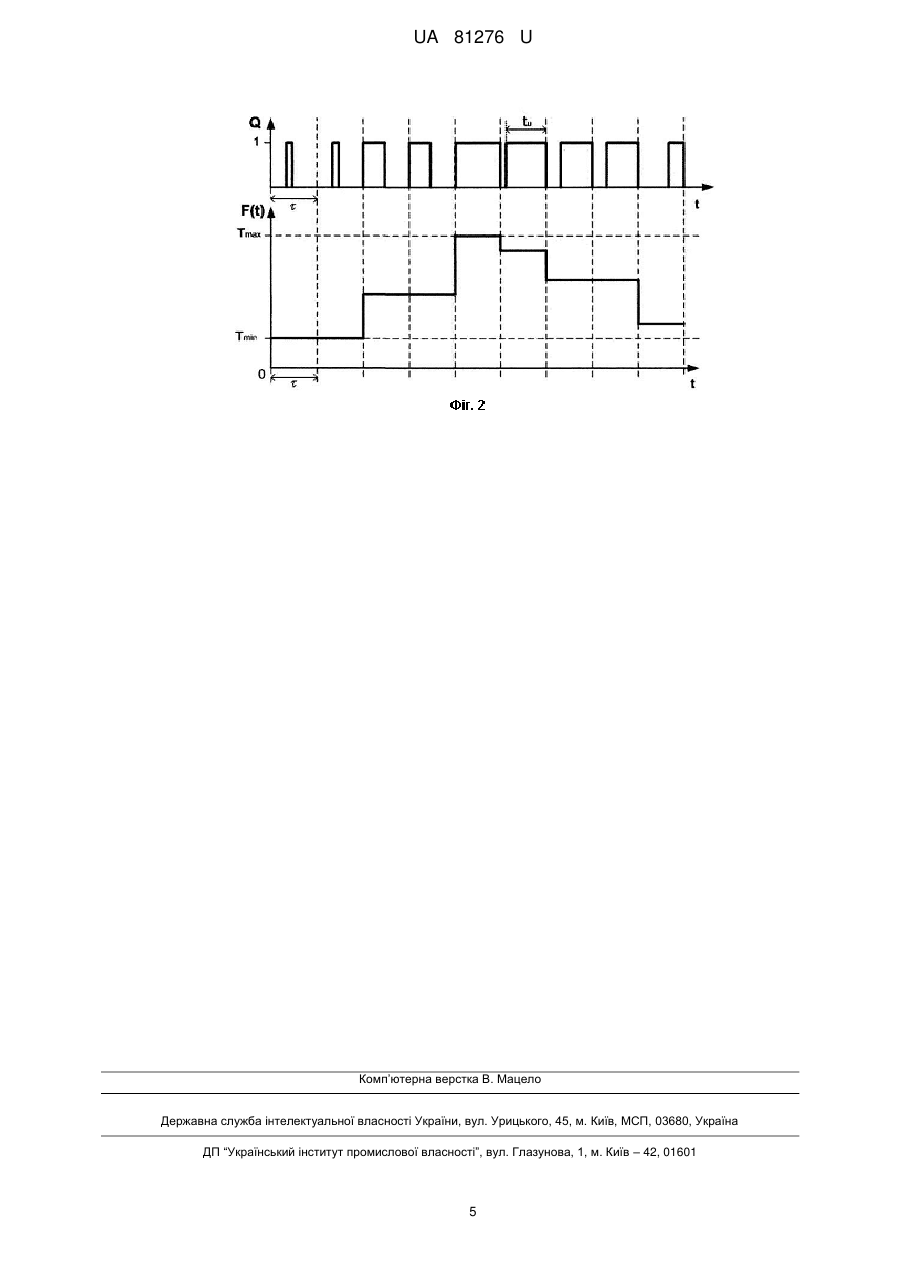
Реферат: Спосіб програмного управління тепловим об'єктом з застосуванням широтно-імпульсної модуляції включає формування коду температури задатчика, вимірювання температури об'єкта і формування управляючої дії у вигляді широтно-імпульсної модуляції, вимірюють вихідні сигнали, визначають перехідну характеристику об'єкта, визначають суму кодів приростів температури до кінця інтервалу програмного регулювання, визначають прогнозовану помилку розузгодження, вимірюють температуру об'єкта у всіх точках теплового поля та формують управляючу дію для теплового об'єкта. UA 81276 U (54) СПОСІБ ПРОГРАМНОГО УПРАВЛІННЯ ТЕПЛОВИМ ОБ'ЄКТОМ З ЗАСТОСУВАННЯМ ШИРОТНОІМПУЛЬСНОЇ МОДУЛЯЦІЇ UA 81276 U UA 81276 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем програмного регулювання температури середовищ або тіл, зокрема до способів керування температурою об'єкта по заданій програмі, і може буде реалізована в системах керування в енергетиці, хімічній, металургійній, харчовій та інших областях промисловості. Відомий спосіб програмного визначення стану електронагрівача [1], що включає керування електрорушійною силою за допомогою комп'ютера і одночасні виміри напруги на електронагрівачі та з'єднаному послідовно з ним термостабілізованому електричному опорі. Недоліком вказаного способу є неможливість використання даного методу для управління об'єктом з розподіленими параметрами, невисока точність стабілізації температури. Найбільш близьким аналогом є спосіб програмного регулювання і пристрій для його здійснення [2], що включає формування коду температури задатчика, вимірювання температури об'єкта і формування управляючої дії, у вигляді ступінчастої функції, управляючу дію формують як суму одиничних функцій, при відомому значенні управляючої дії, вимірюють вихідні сигнали і по ним визначають перехідну характеристику об'єкта, по якій визначають суму кодів приростів температури до кінця інтервалу програмного регулювання, обумовлених відповідними одиничними функціями, визначають прогнозовану помилку розузгодження як різницю між отриманою сумою, відповідною управляючої дії для цього ж моменту часу, і кодом приросту температури задатчика, корегують її на величину помилки розузгодження, що мала місце на початок інтервалу програмного регулювання, а управляючу дію формують у вигляді суми скоректованої помилки розузгодження і управляючої дії на попередньому інтервалі програмного регулювання. Недоліком вказаного способу є неможливість використання даного методу для управління об'єктом з розподіленими параметрами, складність реалізації ступінчатої функції для теплових об'єктів великої потужності. В основу корисної моделі, поставлена задача розробки способу програмного керування тепловим об'єктом з розподіленими параметрами з застосуванням широтно-імпульсної модуляції для переходу від управління точковим об'єктом до управління температурним полем з підвищенням точності стабілізації температури і надійності. Поставлена задача вирішується тим, що спосіб програмного управління тепловим об'єктом з застосуванням широтно-імпульсної модуляції (ШІМ), що включає формування коду температури задатчика, вимірювання температури об'єкта і формування управляючої дії, у вигляді ШІМ, управляючу дію формують як послідовність прямокутних імпульсів різної довжини, при відомому значенні управляючої дії, вимірюють вихідні сигнали і по ним визначають перехідну характеристику об'єкта, по якій визначають суму кодів приростів температури до кінця інтервалу програмного регулювання, обумовлених відповідними прямокутними імпульсами, визначають прогнозовану помилку розузгодження як різницю між отриманою сумою, відповідною управляючої дії для цього ж моменту часу, і кодом приросту температури задатчика, корегують її на величину помилки розузгодження, що мала місце на початок інтервалу програмного регулювання, а управляючу дію формують у вигляді суми скоректованої помилки розузгодження і управляючої дії на попередньому інтервалі програмного регулювання, включає вимірювання температури об'єкта у всіх n точках теплового поля і формування управляючої дії для об'єкта з розподіленими параметрами з застосуванням широтно-імпульсної модуляції. Вимірювання температури об'єкта у всіх n точках теплового поля і формування управляючої дії для об'єкта з розподіленими параметрами дозволяє програмно керувати тепловим об'єктом з розподіленими параметрами та підвищує точність регулювання температури теплового поля. Суть корисної моделі пояснюється кресленням: Фіг. 1. - ряд перехідних функцій теплового об'єкта. Фіг. 2.- довільний закон зміни температури та відповідно до нього формування управляючої дії з застосуванням широтно-імпульсної модуляції. Для реалізації запропонованого способу на стадії підготовки необхідно зняти перехідні характеристики об'єкта (Фіг. 1) регулювання та за отриманими кривими виміряти тривалість перехідних процесів в об'єкті. Час перехідного процесу поділяється на n рівних інтервалів . В точках t , де t 1,2n - вимірюється значення вихідного сигналу (температури) T1, T2 ,, Tn та за формулою: Y t K i, j,k t k (1) X 1 UA 81276 U вираховуються відповідні коефіцієнти передавання теплового впливу K i, j,k для керування 5 10 15 20 тепловим полем в момент часу k , де i - номер датчика 1 i n , j - номер нагрівача 1 j n , k - номер інтервалу часу 1 k . Будь-яку управляючу дію можна представити у вигляді суми одиничних функцій. Для теплових полів справедливий принцип суперпозиції, який полягає в тому, що зміна температури об'єкта рівна сумі змін температури, обумовлених кожним тепловим потоком (якщо їх декілька) окремо. Тому при дії на об'єкт теплового потоку, що має вид ступінчастої функції, за умови, що зміни ступінчастій функції відбуваються в моменти, кратні за допомогою масиву коефіцієнтів K i, j,k можна розрахувати температуру об'єкта у будь-який момент часу, кратний . Спосіб реалізується наступним чином: У початковому момент часу коди приросту теплових потоків обнулені. Коефіцієнти передавання теплового впливу для керування тепловим полем K i, j,1 в початковий момент часу розраховуються за попередньо знятими перехідними характеристиками. Після запуску системи програмного регулювання починається обчислення прогнозованої зміни температури об'єкта відносно T0 для кожної з n точок. Для обчислення величини управляючої дії, яка за проміжок часу виведе об'єкт в точку, задану за програмою, необхідно обчислити, в яку точку вийде об'єкт під впливом дії, що управляє, яка мала місце до початку поточного інтервалу часу . Тому прогнозована зміна температури в точці t r обчислюється без урахування теплового потоку, який подається в мить, коли час перевищить t r за формулою: Tip ,r n k m j1 r 1 K i, j,m n Q j,r k Q j,r K i, j,r , (2) j1r k m1 де T p - розрахункова прогнозована зміна температури об'єкта в i-ой точці в кінці r-го i,r інтервалу часу під впливом сумарного теплового потоку від усіх нагрівачів, підведених до моменту часу t r ; Q j,r - приріст дії теплового потоку, що управляє, на початок r-го 25 інтервалу часу; n k m j 1 r 1 K i, j,m Q j,r - приріст температури датчика викликане приростом теплових потоків всіх n нагрівачів, для яких час перехідних процесів минув, і коефіцієнти K i, j,r не змінюються і рівні K i, j,m ; n k Q j,r K i, j,r - приріст температури датчика викликаний приростом теплових потоків j 1r k m 1 30 всіх n нагрівачів, для яких час перехідних процесів не минув; K i, j,m - відповідні коефіцієнти 35 передавання теплового впливу для керування тепловим полем в момент часу m ; K i, j,r відповідні коефіцієнти передавання теплового впливу для керування тепловим полем в момент часу r ; m,r - номери інтервалів часу. Потім вектор розрахункової температури порівнюється з вектором температури, заданим програмно. Вектор різниці з відповідним знаком, вираховується як: 40 45 1 TrЗ Trp (3) де TrЗ - приріст температури, потрібний за програмою. Під час виконання програми регулювання температура навколишнього середовища може змінюватися. Оскільки швидкість зміни температури навколишнього середовища звичайно значно менше швидкості температури об'єкта, перехідними процесами, обумовленими коливаннями зовнішньої температури, можна нехтувати. Проте, ці коливання можуть викликати помилку розузгодження, а також погрішності ЦАП і АЦП можуть викликати помилку розузгодження, яку необхідно враховувати. Для цього на елемент подається код приросту температури задатчика на кінець r -го інтервалу і код приросту температури всіх датчиків на цей же момент часу. Різницевий код дорівнює: 2 TrЗ 1 Trд 1 (4) 2 UA 81276 U 5 де T д - вектор приростів температури в точках. r 1 Оскільки зміну зовнішньої температури передбачити складно, і оскільки ця зміна за час надзвичайно мала, приймаємо 2 r 2 r 1 . Виходячи з цього, розраховується повне відхилення прогнозованої температури об'єкта від температури, заданої за програмою. Сумарний вектор прогнозованих помилок розузгодження дії, що управляє, обчислюється за формулою: 1 2 TrЗ Trp TrЗ 1 Trд 1 (5) 15 Очевидно, що для k 1, за умови, що температура в усіх точках простору не відрізнялася З від T0 , Tk , оскільки решта всіх додатків рівна нулю. Для того, щоб від початку r-гο інтервалу часу до його кінця температура у всіх n точках поля стала рівною заданій за програмою, необхідно підвести додатково тепловий потік, який викличе рівну по величині, але протилежну по знаку зміну температури у всіх відповідних точках. Але на кожну точку поля впливають всі n нагрівачів одночасно. Тому для i-ої точки простору 1 i n ця зміна повинна задовольняти рівнянню: Q1 K i,1,r Q2 K i,2,r Qn K i,n,r i . (6) 20 Таких рівнянь - n . Тому значення приростів теплових потоків для кожного з n нагрівачів обчислюється шляхом сумісного вирішення системи рівнянь: Q1 K1,1,r Q2 K1,2,r Qn K1,n,r 1 Q1 K 2,1,r Q2 K 2,2,r Qn K 2,n,r 2 , (7) Q1 K n,1,r Q2 K n,2,r Qn K n,n,r n або в матричній формі: K1 Q , (8) 10 25 30 де - матриця стовпець приростів температур наприкінці інтервалу часу , що містить n елементів; Q - матриця рядок приростів теплового потоку на початку цього же інтервалу часу r , які компенсують за час відповідні прирости температур, що містить n елементів. Тому для обчислень використовуються тільки коефіцієнти K i, j,1 . Після чого вираховується значення приросту теплового потоку за формулою: Q , (9) K1 Після обчислення значення приросту теплового потоку Q j ці значення підставляються в систему рівнянь (7), вирішення якої дає значення приростів повного теплового потоку Q j нагрівачів. Потім за формулою (10) обчислюється повний тепловий потік для кожного з n нагрівачів: Qi k Q j .·(10) r 1 Значення кодів приросту теплового потоку Q j,k 35 40 j 1,2,,n;k 1,2,, j-го нагрівача потоку Q i i 0,1 ,n обчислюються , на початок k-го інтервалу часу і сумарного теплового та записуються в пам'яті, перетворюються в аналоговий сигнал, який посилюється і подається на нагрівачі. Щоб перейти від управляючої дії виду ступінчатої функції (Фіг. 2), яку важко реалізувати для теплових об'єктів великої потужності, до управляючої дії з застосуванням широтно-імпульсної модуляції задаються максимальною величиною теплового потока Qmax для даного нагрівача. Виходячи з твердження, що кількість тепла рівна добутку Qi , рівного Qmax tu , де tu час, за який нагрівач формує Qmax , визначається як: Qi , 0 t u , Qmax щоб прогрів об'єкта проходив рівномірно інтервал може бути розбитий на l інтервалів часу. З початком кожного інтервалу формується елементарний імпульс довжини t : tu 3 UA 81276 U t t u '. l Під впливом підведеного до об'єкта тепла, об'єкт починає змінювати свою температуру на 5 10 TiЗ . Після запису коду зміни температури система починає обчислювати значення дії, що управляє, для інтервалу часу від t i до t i 1 . Процес розрахування відновлюється, як тільки, закінчиться i-ий інтервал часу. Технічний результат, який досягається при використанні корисної моделі: 1. Можливість ефективного керування тепловим об'єктом з розподіленими параметрами з застосуванням широтно-імпульсної модуляції. 2. Підвищення точності регулювання температури. Джерела інформації: 1. Патент на винахід України № 83073, МПК G05D23/19, G05D23/20. 2. Патент SU№ 1464147, МПК G05D23/19. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Спосіб програмного управління тепловим об'єктом з застосуванням широтно-імпульсної модуляції (ШІМ), що включає формування коду температури задатчика, вимірювання температури об'єкта і формування управляючої дії у вигляді ШІМ, управляючу дію формують як послідовність прямокутних імпульсів різної довжини, при відомому значенні управляючої дії, вимірюють вихідні сигнали і по ним визначають перехідну характеристику об'єкта, по якій визначають суму кодів приростів температури до кінця інтервалу програмного регулювання, обумовлених відповідними прямокутними імпульсами, визначають прогнозовану помилку розузгодження як різницю між отриманою сумою, відповідною управляючої дії для цього ж моменту часу, і кодом приросту температури задатчика, корегують її на величину помилки розузгодження, що мала місце на початок інтервалу програмного регулювання, а управляючу дію формують у вигляді суми скоректованої помилки розузгодження і управляючої дії на попередньому інтервалі програмного регулювання, який відрізняється тим, що вимірюють температуру об'єкта у всіх n точках теплового поля і формують управляючу дію для теплового об'єкта з застосуванням широтно-імпульсної модуляції (ШІМ). 4 UA 81276 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for programmed control of thermal object using pulse-width modulation
Автори англійськоюSavytskyi Serhii Mykhailovych, Hapon Anatolii Ivanovych, Kachanov Petro Oleksiiovych, Evseenko Oleh Mykolaiovych, Vyskrebentsev Viktor Olehovych
Назва патенту російськоюСпособ программного управления тепловым объектом с применением широтно-импульсной модуляции
Автори російськоюСавицкий Сергей Михайлович, Гапон Анатолий Иванович, Качанов Петр Алексеевич, Евсеенко Олег Николаевич, Выскребенцев Виктор Олегович
МПК / Мітки
МПК: G05D 23/19
Мітки: управління, спосіб, застосуванням, тепловим, широтно-імпульсної, модуляції, програмного, об'єктом
Код посилання
<a href="https://ua.patents.su/7-81276-sposib-programnogo-upravlinnya-teplovim-obehktom-z-zastosuvannyam-shirotno-impulsno-modulyaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб програмного управління тепловим об’єктом з застосуванням широтно-імпульсної модуляції</a>
Спосіб програмного керування тепловим об’єктом з розподіленими параметрами
Номер патенту: 74745
Опубліковано: 12.11.2012
Автори: Качанов Петро Олексійович, Савицький Сергій Михайлович, Римар Сергій Іванович, Гапон Анатолій Іванович
МПК: G05D 23/19
Мітки: параметрами, керування, об'єктом, тепловим, розподіленими, спосіб, програмного
Формула / Реферат:
Спосіб програмного керування тепловим об'єктом з розподіленими параметрами, що включає формування коду температури задавача, вимірювання температури об'єкта і формування управляючої дії, у вигляді ступінчастої функції, управляючу дію формують як суму одиничних функцій, при відомому значенні управляючої дії, вимірюють вихідні сигнали, і по ним визначають перехідну характеристику об'єкта, по якій визначають суму кодів приростів температури до...
Спосіб формування трапецеїдальної широтно-імпульсної модуляції напруги інвертора

Номер патенту: 67170
Опубліковано: 10.02.2012
Автори: Скапа Євген Іванович, Шокарьов Дмитро Анатолійович
МПК: H02M 7/00
Мітки: широтно-імпульсної, трапецеїдальної, напруги, модуляції, формування, спосіб, інвертора
Формула / Реферат:
Спосіб формування вихідної напруги інвертора частотою, що використовує широтно-імпульсну модуляцію частотою живильної постійної напруги , що перетворюється в змінне, огинаюча імпульсів якого трапецеїдальної форми амплітудою , який...
Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (шім)
Номер патенту: 57418
Опубліковано: 25.02.2011
Автори: Алєнін Дмитро Олексійович, Бутов Олександр Сергійович, Семчук Роман Вячеславович, Малиновський Михайло Леонідович, Пушкар Олександр Миколайович, Фурман Ілля Олександрович
МПК: G05B 19/18
Мітки: гармонічного, шім, формування, модуляції, спосіб, сигналу, використанням, широтно-імпульсної, безпечного
Формула / Реферат:
1. Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (ШІМ), який полягає у тому, що двома каналами формуються незалежні імпульсні ВЧ послідовності із близькими частотами з подальшим застосуванням для них логічної операції "Виключне АБО", при цьому різниця частот ВЧ послідовностей задається рівною частоті результуючого гармонічного сигналу, який відрізняється тим, що для зменшення...
Спосіб програмного регулювання температурного поля
Номер патенту: 77636
Опубліковано: 25.02.2013
Автори: Гапон Анатолій Іванович, Савицький Сергій Михайлович, Качанов Петро Олексійович, Римар Сергій Іванович
МПК: G05D 23/19
Мітки: температурного, програмного, поля, регулювання, спосіб
Формула / Реферат:
Спосіб програмного регулювання температурного поля, що включає формування коду температури задатчика, вимірювання температури об'єкта і формування управляючої дії у вигляді ступінчастої функції, управляючу дію формують як суму одиничних функцій при відомому значенні управляючої дії, вимірюють вихідні сигнали і по ним визначають перехідну характеристику об'єкта, по якій визначають суму кодів приростів температури до кінця інтервалу програмного...
Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (шім)
Номер патенту: 39228
Опубліковано: 10.02.2009
Автори: Аллашев Олександр Юрійович, Тертишний Сергій Миколайович, Бутов Олександр Сергійович, Малиновський Михайло Леонідович, Борисенко Володимир Анатолійович, Кощій Леонід Дмитрович, Бовчалюк Станіслав Ярославович, Фурман Ілля Олександрович
МПК: G05B 19/18
Мітки: безпечного, широтно-імпульсної, сигналу, використанням, модуляції, шім, гармонічного, формування, спосіб
Формула / Реферат:
Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (ШІМ), в якому виконують фільтрацію ВЧ-сигналу зі змінною скважністю за допомогою фільтра високих частот, який відрізняється тим, що двома каналами формують незалежні імпульсні високочастотні (ВЧ) послідовності із близькими частотами та подальшим застосуванням логічної операції "Виключне АБО", при цьому різниця частот ВЧ- послідовностей...
Попередній патент: Інфрачервоний нагрівач
Наступний патент: Спосіб отримання 1-(гідразинокарбоніл)-метил-7-бром-5феніл-1,2-дигідро-3н-1,4-бенздіазепін-2-ону
Випадковий патент: Питна вода "прокар"