Електромотор з підставкою (варіанти) і спосіб його розташування і кріплення (варіанти)
Формула / Реферат
1. Електромотор (1) з підставкою, який містить привідний вал (3), що виступає з двох сторін барабана мотора (1) вздовж подовжньої осі обертання (Х-Х), і має ексцентричний центр ваги (В) відносно привідного вала (3), який відрізняється тим, що містить засоби позиціонування (11а, 12а) з можливістю взаємного блокування з відповідними засобами позиціонування (9а, 10а) підставки (5), і тим, що засоби позиціонування (11а, 12а) мотора (1) зміщені на зумовлений кут ![]() , що вимірюється між проекціями на площину
, що вимірюється між проекціями на площину ![]() , розташовану по нормалі до осі обертання (Х-Х), двох прямих ліній (S1 і SB), які виходять з осі обертання (Х-Х) перпендикулярно і проходять відповідно через засоби позиціонування (11а, 12а) і центр ваги (В).
, розташовану по нормалі до осі обертання (Х-Х), двох прямих ліній (S1 і SB), які виходять з осі обертання (Х-Х) перпендикулярно і проходять відповідно через засоби позиціонування (11а, 12а) і центр ваги (В).
2. Електромотор (1) з підставкою, який містить привідний вал (3), що виступає з двох сторін барабана мотора (1) вздовж подовжньої осі обертання (Х-Х), який відрізняється тим, що має засоби початкового кутового положення (4), що виступають з мотора, засоби позиціонування (12а, 11а), виконані з можливістю взаємного блокування з відповідними засобами позиціонування (9а, 10а) підставки (5), причому засоби позиціонування (11а, 12а) мотора (1) та засоби початкового кутового положення (4) зміщені на зумовлений кут корекції ![]() , що вимірюється між проекціями на площину
, що вимірюється між проекціями на площину ![]() , розташовану по нормалі до осі обертання (Х-Х), двох прямих ліній (S1, SВ), які виходять з осі обертання (Х-Х) перпендикулярно і проходять через засоби позиціонування (11а, 12а) і засоби початкового кутового положення (4).
, розташовану по нормалі до осі обертання (Х-Х), двох прямих ліній (S1, SВ), які виходять з осі обертання (Х-Х) перпендикулярно і проходять через засоби позиціонування (11а, 12а) і засоби початкового кутового положення (4).
3. Спосіб кріплення і розташування електромотора (1) на підставці для мотора (5), в якому електромотор (1) має привідний вал (3), що виступає з двох сторін мотора (1) вздовж подовжньої осі обертання (Х-Х), засоби позиціонування (11а, 12а) здатні забезпечити взаємоблокуюче з'єднання з відповідними засобами позиціонування (9а, 10а) підставки (5), мотор (1) має ексцентричний центр ваги (В) відносно привідного вала (3), і який складається з етапів підтримки мотора (1) привідним валом (3), щоб дозволити двигуну (1) обертатися вільно на привідному валу (3) під впливом сил тяжіння, обертання мотора (1) на привідному валу (3) на компенсуючий кут ![]() , який залежить від меншого кута
, який залежить від меншого кута ![]() , що визначається між проекціями на площині
, що визначається між проекціями на площині ![]() , розташованої по нормалі до осі обертання (Х-Х), двох прямих ліній (S1, S2), які виходять з осі обертання (Х-Х) перпендикулярно і проходять через засоби позиціонування (11а, 12а) мотора (1) і центр ваги (В) відповідно таким чином, щоб встановити засоби позиціонування (11а, 12а) мотора (1) у таке кутове положення, щоб дозволити їм бути взаємно з'єднаними з відповідними засобами позиціонування (9а, 10а), коли мотор (1) кріпиться на підставку (5), кріплення мотора (1) на підставку (5) таким чином, щоб здійснити взаємоблокуюче з'єднання.
, розташованої по нормалі до осі обертання (Х-Х), двох прямих ліній (S1, S2), які виходять з осі обертання (Х-Х) перпендикулярно і проходять через засоби позиціонування (11а, 12а) мотора (1) і центр ваги (В) відповідно таким чином, щоб встановити засоби позиціонування (11а, 12а) мотора (1) у таке кутове положення, щоб дозволити їм бути взаємно з'єднаними з відповідними засобами позиціонування (9а, 10а), коли мотор (1) кріпиться на підставку (5), кріплення мотора (1) на підставку (5) таким чином, щоб здійснити взаємоблокуюче з'єднання.
4. Спосіб кріплення і розташування електромотора (1) на підставці (5), в якому електромотор (1) має привідний вал (3), що виступає з двох сторін барабана мотора (1) вздовж подовжньої осі обертання (Х-Х), засоби позиціонування (11а, 12а) здатні забезпечити взаємоблокуюче з'єднання з відповідними засобами позиціонування (9а, 10а) підставки (5), засоби початкового кутового положення (4), що виступають з мотора (1), мотор (1) має ексцентричний центр ваги (В) відносно привідного вала (3), засоби позиціонування (11а, 12а) мотора (1) і засоби початкового кутового положення (4) утворюють кут корекції ![]() , що вимірюється між проекціями на площину
, що вимірюється між проекціями на площину ![]() , розташовану по нормалі до осі обертання (Х-Х), двох прямих ліній (S1, S2), які виходять з осі обертання (Х-Х) перпендикулярно і проходять через засоби позиціонування (11а, 12а) і засоби початкового кутового положення (4) відповідно, спосіб містить етапи підтримки мотора (1) привідним валом (3), щоб дозволити двигуну (1) обертатися вільно на привідному валу (3), причому зазначене обертання призначене примусити засоби початкового кутового положення (4) сполучитися впритул з кутовими зупиняючими засобами (35), розміщеними на зумовленому куті зупинки
, розташовану по нормалі до осі обертання (Х-Х), двох прямих ліній (S1, S2), які виходять з осі обертання (Х-Х) перпендикулярно і проходять через засоби позиціонування (11а, 12а) і засоби початкового кутового положення (4) відповідно, спосіб містить етапи підтримки мотора (1) привідним валом (3), щоб дозволити двигуну (1) обертатися вільно на привідному валу (3), причому зазначене обертання призначене примусити засоби початкового кутового положення (4) сполучитися впритул з кутовими зупиняючими засобами (35), розміщеними на зумовленому куті зупинки ![]() відносно прямої лінії (SY), що проходить вертикально вниз від осі обертання (Х-Х), обертання мотора (1) на привідному валу (3) на компенсуючий кут
відносно прямої лінії (SY), що проходить вертикально вниз від осі обертання (Х-Х), обертання мотора (1) на привідному валу (3) на компенсуючий кут ![]() , який залежить від зумовленого компенсуючого кута
, який залежить від зумовленого компенсуючого кута ![]() і зумовленого кута зупинки
і зумовленого кута зупинки ![]() таким чином, щоб привести засоби позиціонування (11а, 12а) мотора (1) на таке кутове положення, щоб дозволити їм бути взаємно зблокованими з відповідними засобами позиціонування (9а, 10а), коли мотор (1) кріпиться на підставку (5), і кріплення мотора (1) на підставку (5) таким чином, щоб здійснити взаємоблокуюче з'єднання.
таким чином, щоб привести засоби позиціонування (11а, 12а) мотора (1) на таке кутове положення, щоб дозволити їм бути взаємно зблокованими з відповідними засобами позиціонування (9а, 10а), коли мотор (1) кріпиться на підставку (5), і кріплення мотора (1) на підставку (5) таким чином, щоб здійснити взаємоблокуюче з'єднання.
5. Спосіб за п. 4, який відрізняється тим, що засобом початкового кутового положення (4) є електричний конденсатор.
6. Спосіб за п. 4 або 5, який відрізняється тим, що компенсуючий кут ![]() дорівнює різниці між зумовленим кутом корекції
дорівнює різниці між зумовленим кутом корекції ![]() і зумовленим кутом початкового положення
і зумовленим кутом початкового положення ![]() .
.
Текст
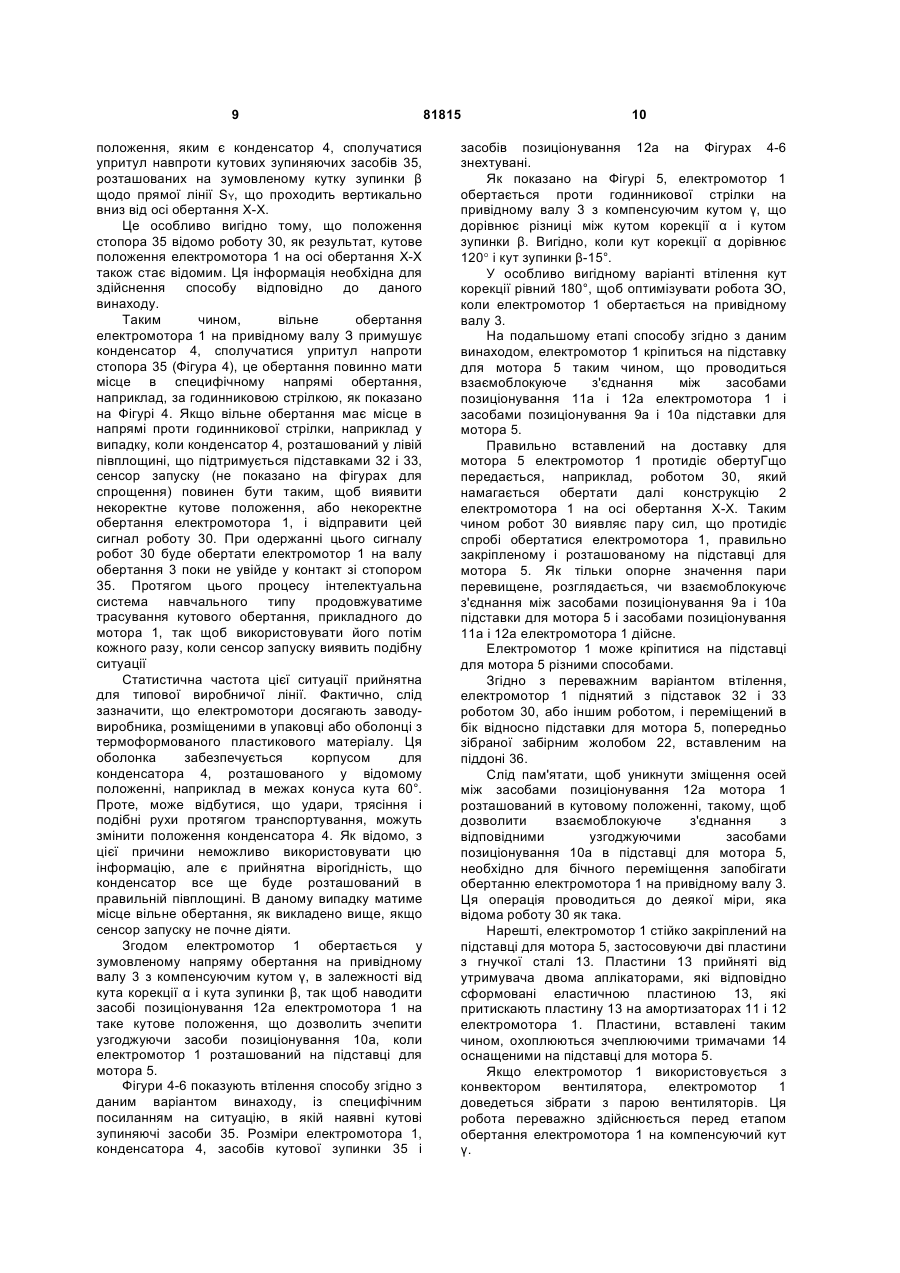
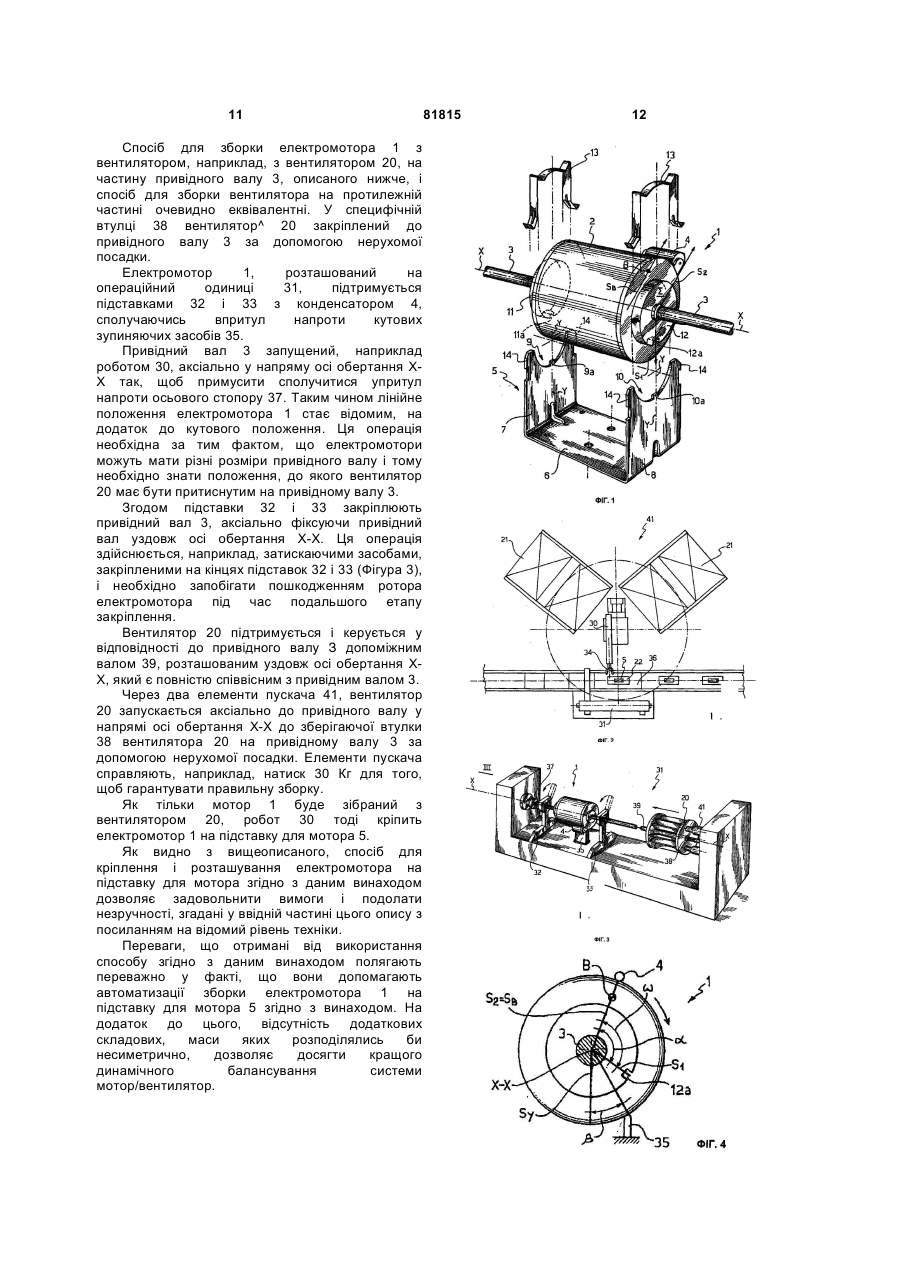
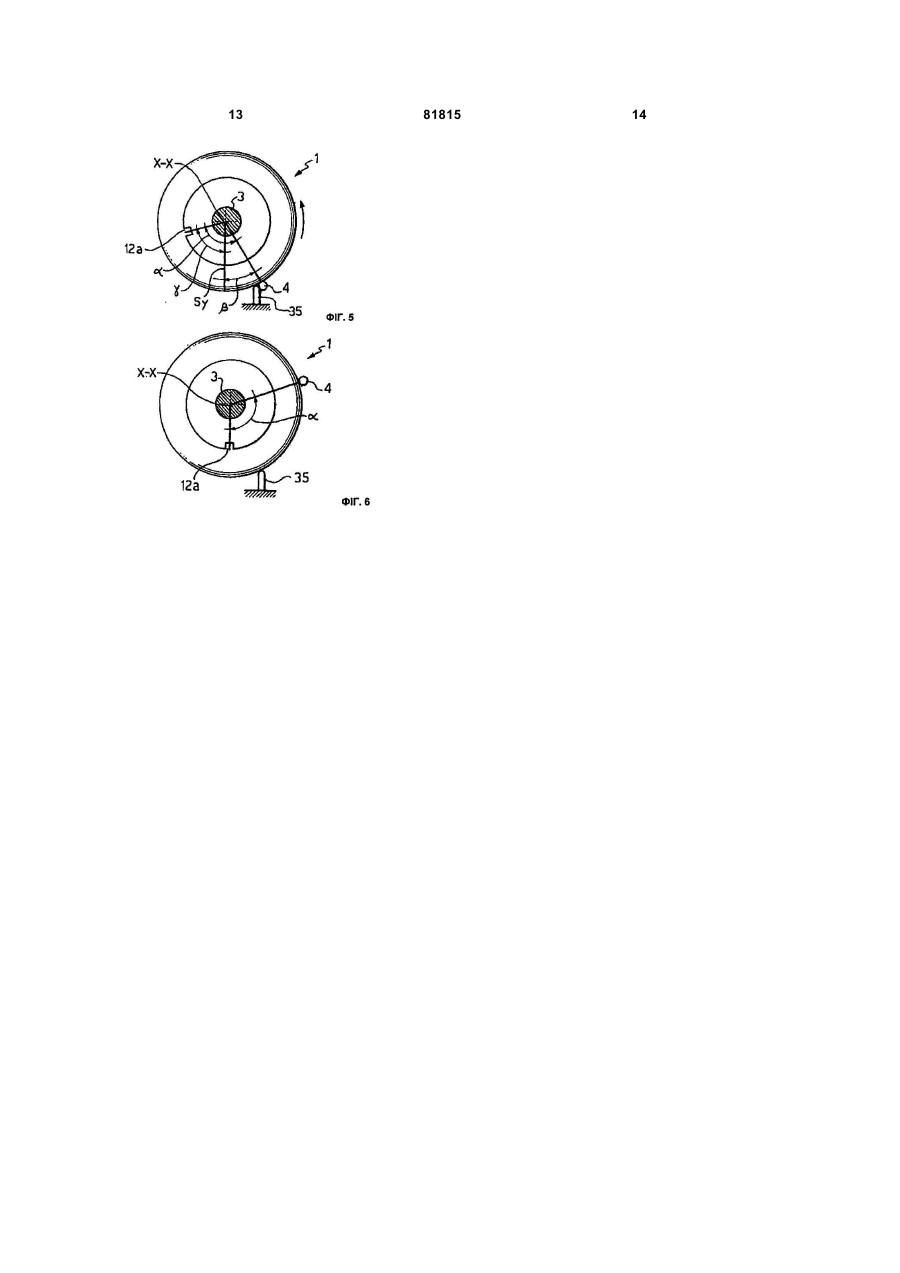
1. Електромотор (1) з підставкою, який містить привідний вал (3), що виступає з двох сторін барабана мотора (1) вздовж подовжньої осі обертання (Х-Х), і має ексцентричний центр ваги (В) відносно привідного вала (3), який відрізняється тим, що містить засоби позиціонування (11а, 12а) з можливістю взаємного блокування з відповідними засобами позиціонування (9а, 10а) підставки (5), і тим, що засоби позиціонування (11а, 12а) мотора (1) 2 (19) 1 3 81815 4 вимірюється між проекціями на площину (å ) , розташовану по нормалі до осі обертання (Х-Х), двох прямих ліній (S1, S2), які виходять з осі обертання (Х-Х) перпендикулярно і проходять через засоби позиціонування (11а, 12а) і засоби початкового кутового положення (4) відповідно, спосіб містить етапи підтримки мотора (1) привідним валом (3), щоб дозволити двигуну (1) обертатися вільно на привідному валу (3), причому зазначене обертання призначене примусити засоби початкового кутового положення (4) сполучитися впритул з кутовими зупиняючими засобами (35), розміщеними на зумовленому куті зупинки (b) відносно прямої лінії (SY), що проходить вертикально вниз від осі обертання (Х-Х), обертання мотора (1) на привідному валу (3) на компенсуючий кут (g ) , який залежить від зумовленого компенсуючого кута (a ) і зумовленого кута зупинки (b) таким чином, щоб привести засоби позиціонування (11а, 12а) мотора (1) на таке кутове положення, щоб дозволити їм бути взаємно зблокованими з відповідними засобами позиціонування (9а, 10а), коли мотор (1) кріпиться на підставку (5), і кріплення мотора (1) на підставку (5) таким чином, щоб здійснити взаємоблокуюче з'єднання. 5. Спосіб за п. 4, який відрізняється тим, що засобом початкового кутового положення (4) є електричний конденсатор. 6. Спосіб за п. 4 або 5, який відрізняється тим, що компенсуючий кут (g ) дорівнює різниці між Цей винахід стосується електромотора, який може кріпитися і розташовуватися на підставку для мотора згідно з відмітною частиною пункту 1 формули винаходу. Інший аспект цього винаходу стосується способу кріплення і розташування електромотора на підставку для мотора згідно з відмітною частиною незалежних пунктів 3 і 4 формули винаходу. Більш детально, цей винахід стосується способу для кріплення і розташування електромотора на автоматизованих лініях. Відомі електромотори, які доведеться кріпити на підставку для мотора, і способи для кріплення і розташування електромотора, в яких оператор або людиноподібний робот кріпить і правильно розташовує електромотор на підставку для мотора, що проектуються для таких цілей. У випадку, якщо в якому операції кріплення і розташування здійснюються операторомлюдиною, останній може легко перевірити, чи правильно розміщений електромотор. Навпаки, де такі операції доведеться здійснювати в межах автоматизованої лінії, доведеться забезпечуватися множиною контрольних точок таким чином, щоб можна було ідентифікувати просторове положення робота щодо мотора і/або навпаки. Фактично, коли робот піднімає електромотор від піддону або пункту зберігання електромотора, він "сліпий" відносно справжнього положення мотора. Для того, щоб надати можливість людиноподібному роботу розпізнавати положення мотора у просторі, його необхідно забезпечити цілим рядом датчиків положення, шифраторами, фотоелементами і т.п. Таким чином може бути визначено ряд обертальних/поступальних операцій, які робот повинен виконувати для того, щоб кріпити і правильно розташувати електромотор на відповідне місце. Проте, таке рішення має незручності, що потребує значної кількості датчиків, на шкоду автоматичній контролюючій системі, яка стає складною і нестійкою. Необхідність мати спосіб, який зробить можливим зменшити використання датчиків положення, таким чином дуже відчутна. Технічна проблема, що лежить в основі цього винаходу, це таке оснащення електромотора і спосіб для кріплення мотора, який повинен кріпитися на підставку для мотора, що має структурні і функціональні характеристики, що можуть закріпити і розмістити так, щоб задовольнити вищезазначену вимогу. Ця проблема вирішена пристроєм електромотора з підставкою для мотора, де згаданий електромотор містить привідний вал, що виступає з двох сторін барабану мотора вздовж подовжньої осі обертання, він має ексцентричний центр тяжіння відносно привідного валу, та засоби позиціонування, взаємоблоковані з відповідними узгоджуючими засобами позиціонування підставки, причому засоби позиціонування електромотора створюють кут зміщення на зумовлений кут, що вимірюється між проекціями на площину, розташовану по нормалі до осі обертання, двох прямих ліній, які виходять з осі обертання перпендикулярно і проходять відповідно через засоби позиціонування і центр тяжіння електромотора. Інші переваги і характеристики даного винаходу будуть яснішими з подальшого детального опису, який наданий з посиланням на додані малюнки, які передбачені винятково з метою необмежуючого прикладу і на яких: - Фігура 1 показує перспективний вид електромотора, який може кріпитися на підставці для мотора згідно з даним винаходом, - Фігура 2 показує одне використання способу згідно з даним винаходом, - Фігура 3 показує детальний опис з Фігури 2, - Фігури 4-6 показують схематичні види збоку мотора з Фігури 3 в напряму, зазначеному зумовленим кутом корекції (a ) і зумовленим кутом (b) . початкового положення 5 стрілкою III з Фігури 3 протягом різних етапів способу згідно з винаходом. З посиланням на вищезазначені фігури, під 1 зазначено електромотор взагалі, який повинен кріпитися і розташовуватися в підставку для мотора 5, з використанням способу згідно з даним винаходом. Подібно до звичайного електромотора загальноприйнятого типу, електромотор 1 містить силову підтримуючу конструкцію 2 для статора (не показано на фігурі) і привідного валу 3, з яким сполучений ротор (не показано у фігурі). Наведений нижче приклад, стосується електромотора для оснащення вентилятором/конвектором, щоб привідити в дію пару вентиляторів. Для того, щоб привести в дію пару вентиляторів привідного валу 3, що виступають з обох сторін барабану електромотора 1 уздовж подовжньої осі обертання (Х-Х). У описі, на який буде далі посилання на вентилятор 20 (Фігура 3), опис також може застосовуватися й до іншого вентилятора, не показаного на фігурах. Електромотор 1 має ексцентричний центр тяжіння В відносно привідного валу 3. Згідно з одним аспекту винаходу, ексцентриситет електромотора 1 є завдяки присутності відповідним кутовим засобам 4, що виступають з електромотора 1. Згідно з переважним варіантом втілення, відповідні кутові засоби 4 приймають форму електричного конденсатора. Електричний конденсатор 4 має функцію стартера на етапі запуску електромотора 1 і звичайно кріпиться на зовнішній частині силової конструкції 2 електромотора 1. Електромотор 1 розроблений, щоб кріпитися і розташовуватися на підставку для мотора 5, чия функція підтримувати електромотор 1, коли він працює. Зокрема, з вентилятором/конвектором, підставка для мотора 5 сполучена за допомогою жолобу 22 (Фігура 2) для зборів конденсації в деякому розумінні, яка відома як така і не потребує подальшого опису. Згідно з переважним варіантом втілення, підставка для мотора 5 приймає форму листової металевої конструкції, згорнутої U-подібно, що має основу 6 і пару бокових стінок 7 і 8. Бокові стінки 7 і 8 мають відповідні прорізи 9 і 10, щоб одержувати відповідні частини 11 і 12 мотора 1. Згідно зі способом відповідного винаходу, електромотор 1 оснащений засобами позиціонування 11а і 12а, оснащених на відповідних частинах 11 і 12 електромотора 1, і підставка для мотора 5 оснащена узгоджуючими засобами позиціонування 9а і 10а. Засоби позиціонування 11а і 12а електромотора 1 проектуються, щоб забезпечити взаємноблокуюче з'єднання з узгоджуючими засобами позиціонування 9а і 10а підставки для мотора 5. Як буде розкрито далі у описі, засоби позиціонування 9а, 10а, 11а і 12а використовуються не тільки для правильного розташування електромотора 1 на підставку для 81815 6 мотора 5, але і для центрування електромотора 1 відповідно до підставки для мотора 5. Згідно з переважним варіантом втілення, кожен з засобів позиціонування 11а і 12а електромотора 1 приймає форму охоплюючого кожуха, зробленого у відповідних частинах 11 і 12 мотора 1. Згідно з переважним втіленням, засоби позиціонування 11а і 12а електромотора 1, відповідають амортизаторам електромотора 1, розташованим з кожної fioptuitoBOij порожнини привідного валу 3 мотора 1. Кожен із засобів позиціонування 9а і 10 підставки для мотора 5 приймає форму додаткового пристосування, що охоплюється, зробленого відповідно в прорізах 9 і 10 бокових стінок 7 і 8 підставки для мотора 5, який розробляється, щоб прийняти електромотор 1. Засоби позиціонування 9а і 10 підставки для мотора 5, це пристосування, що охоплюються, 9а і 10а, переважно зроблені в нижчій частині прорізів 9 і 10. Альтернативно можливо інвертувати розміщення засобів позиціонування 9а, 10а, 11а і 12а, не нехтуючи застосуванням способу згідно з даним винаходом. Для спрощення, наведений далі опис, що відноситься до засобів позиціонування 10а і 12а, розташованих на одній стороні конструкції, охоплює електромотор 1 і підставку для мотора 5, опис засобів позиціонування 9а і 11а, розташованих на протилежній стороні, було еквівалентним. Засоби позиціонування 12а електромотора 1, створюючи кут, зміщені на зумовлений кут ω, виміряний між проекціями на деяку площину Σ, розташованої по нормалі до осі обертання Х-Х, двох прямих ліній Si і Sb, які виходять з осі обертання Х-Х перпендикулярно і проходять відповідно через засоби позиціонування 12а і центр тяжіння В. Переважно, зумовлений кут ω, що вимірюється між прямою лінією S1 і прямою лінією SВ, відповідає меншому куту, що вимірюється між засобами позиціонування 12а і центром тяжіння В, кут 360-ω також існує у наявності. До того ж, засоби позиціонування 12а електромотора 1 і засоби початкового кутового положення 4, створюючи кут, зміщені на зумовлений кут зміщення а, що вимірюється між проекціями на деяку площину, розташованої по нормалі до осі обертання Х-Х, наприклад, площина Σ, між прямою лінією S1 і прямою лінією S2. Пряма лінія S2 виходить з осі обертання Х-Х перпендикулярно і проходить через засоби початкового кутового положення 4. Переважно, зумовлений кут корекції, що вимірюється між прямою лінією S1 і прямою лінією S2, відповідає меншому куту, що вимірюється між засобами позиціонування 12а і конденсатором 4, кут 360-ω також існує у наявності. Як показано на Фігурі 4, в даному випадку прямі лінії S2 і SB співпадають, так як кутове положення центру тяжіння В визначене 7 конденсатором 4. Очевидно кути α і ω можуть відрізняється один від одного. Тому для застосування способу згідно з даним винаходом передбачається, що як кут ω, так і кут α, відомі у з початку. Фактично як положення, в якому електричний конденсатор 4 розміщений на силовій конструкції 2 електромотора 1, і положення, в якому встановлюється охоплюючий кожух 12а, так і положення центру тяжіння В, відомі Зглочатку або можуть бути щонайменше виміряними заздалегідь. Втілення способу згідно з даним винаходом буде зараз описано з окремим посиланням на випадок з автоматизованою лінією, в якій робот 30 має кріпити і правильно розміщувати електромотор 1 на підставку для мотора 5. Зокрема передбачається, що робот 30, електромотор 1 і підставка для мотора 5 присутні на робочій станції 41 (Фігура 2) автоматизованої виробничій лінії (не показано на Фігурах). Робоча станція 41, для монтажу підставки мотор-вентилятор-мотор, має операційний блок 31, в якому виконуються ряд операцій, що надають можливість роботу 30 знати щонайменше одне положення мотора 1 у просторі, наприклад кутове положення електромотора 1 (відносно осі обертання Х-Х). У випадку з автоматизованою виробничою лінією для конвекторів вентилятора, електромотор 1 доведеться монтувати до вентилятора 20. Ця робота переважно здійснюється в операційному блоці 31. Для цієї цілі роботу необхідно знати також інше положення електромотора 1, що є лінійним положенням, як буде більш детально описано далі з посиланням на етапи монтажу вентилятора 20 з електромотором 1. Робоча станція 31 містить підтримуючі засоби 32 і 33^ здібний підтримувати електромотор 1 через привідний вал 3 і кутові зупиняючі засоби 35, функція яких стане зрозумілою з подальшого опису. Згідно з переважним варіантом втілення, електромотор 1 і підставка для мотора 5 розміщені на піддоні 36, призначеному, щоб транспортувати заготовки до різних операційних одиниць вподовж автоматизованої лінії. Переважно, підставка для мотора 5 розміщена на піддоні 36 вже заздалегідь змонтований зі збірним жолобом 22. Альтернативно, електромотор 1, підставка для мотора 5 і збірний жолоб 22 розташовані близько біля операційного блоку 31, наприклад, в пункті зберігання матеріалів 21. Робот 30 підіймає електромотор 1 за допомогою затискуючих засобів 34 і спрямовує його на підтримуючі засоби 32 і 33. Згідно з переважним варіантом втілення, підтримуючі засоби 32 і 33 мають вид пари підставок, що мають контактну частину "U"- або "V''-подібної форми, яка призначена, щоб приймати привідний вал 3 електромотора 1. Таким чином електромотор 1 підтримується на підставках 32 і 33 за допомогою привідного валу 3. Цей спосіб підтримки електромотора 1 дає можливим для електромотора 1 або підтримуючій конструкції 2 обертатися вільно на привідному 81815 8 валу 3, або під впливом сил тяження навколо подовжньої осі обертання Х-Х. Через дію сили тяжіння і із-за наявність ексцентричного центру тяжіння В, електромотор 1 має тенденцію до безпосереднього положення таким чином, що центр тяжіння В буде у точці з найменшою потенціальною енергією, з чого виходить, що привідний вал 3 у вертикальній осі YY проходить через вісь обертання Х-Х. Затискуючи засоби 34 є бажано, але не обов'язково, парою щипців, кожне з яких піднімає привідний вал 3 на протилежну сторону відносно силової конструкції 2 електромотора 1. Тому вільне обертання електромотора 1 на привідному валу З гарантовано підставками 32 і 33 відповідної форми. Згідно з подальшим етапом способу відповідно до даного винаходу, електромотор 1 обертається У зумовленому напряму обертання, на привідному валу 3 на компенсуючий кут γ, який залежить від меншого кута ω, щоб розташувати засоби позиціонування 12а електромотора 1 на кутове положення, так щоб дозволити йому зчіплювати узгоджуючи засоби позиціонування 10а, коли електромотор 1 вставлений на підставку для мотора 5. Електромотор 1 обертається на привідному валу 3 роботом, також може бути таким же роботом 30 або іншим роботом, що призначений для цієї мети. У виконанні цього обертання, зручно захвачувати електромотор 1 через підтримуючу конструкцію 2 таким чином, що специфічне обертання підтримуючої конструкції 2 відповідає тотожному обертанню засобів позиціонування 12а мотора 1 навколо привідного валу 3. Внаслідок цього обертання, електромотор 1 готовий кріпитися і бути правильно розміщеним на підставці для мотора 5. Слід зазначити, що використання цього втілення способу, може іноді привідити до грубої помилки у разі невірного визначення кута. Фактично, через тертя в моторі і інших процесах випадкового типу може трапитися, що кут ω може відрізнятись в одному моторі від іншого мотора, відповідно роблячи недійсною ефективність методу згідно з даним винаходом. Іншими словами, мотори, які структурно ідентичні і мають той же тип, при вільному обертанні на валу обертання 3, можуть зупинитися у дещо різних положеннях. Оскільки, компенсуючий кут γ функція кута ω, і тому при обертанні електромотора 1 на кут, рівний компенсуючому куту γ, може трапитися, що засоби позиціонування 12а не розташовані у кутовому положенні, такому, щоб дозволити їм вводити в зчеплення засоби позиціонування 10а всередині підставки для мотора 1 без постійно змінюючогося компенсуючого кута γ. Щоб подолати цю незручність використовуються кутові зупиняючі засоби 35, які приймають форму, наприклад, зупинки биття (Фігура 3). Електромотор 1 підтриманий підставками 32 і 33, щоб дозволити йому вільно обертатися на привідному валу 3. Мета цього обертання примусити засоби початкового кутового 9 положення, яким є конденсатор 4, сполучатися упритул навпроти кутових зупиняючих засобів 35, розташованих на зумовленому кутку зупинки β щодо прямої лінії SY, що проходить вертикально вниз від осі обертання Х-Х. Це особливо вигідно тому, що положення стопора 35 відомо роботу 30, як результат, кутове положення електромотора 1 на осі обертання Х-Х також стає відомим. Ця інформація необхідна для здійснення способу відповідно до даного винаходу. Таким чином, вільне обертання електромотора 1 на привідному валу З примушує конденсатор 4, сполучатися упритул напроти стопора 35 (Фігура 4), це обертання повинно мати місце в специфічному напрямі обертання, наприклад, за годинниковою стрілкою, як показано на Фігурі 4. Якщо вільне обертання має місце в напрямі проти годинникової стрілки, наприклад у випадку, коли конденсатор 4, розташований у лівій півплощині, що підтримується підставками 32 і 33, сенсор запуску (не показано на фігурах для спрощення) повинен бути таким, щоб виявити некоректне кутове положення, або некоректне обертання електромотора 1, і відправити цей сигнал роботу 30. При одержанні цього сигналу робот 30 буде обертати електромотор 1 на валу обертання 3 поки не увійде у контакт зі стопором 35. Протягом цього процесу інтелектуальна система навчального типу продовжуватиме трасування кутового обертання, прикладного до мотора 1, так щоб використовувати його потім кожного разу, коли сенсор запуску виявить подібну ситуації Статистична частота цієї ситуації прийнятна для типової виробничої лінії. Фактично, слід зазначити, що електромотори досягають заводувиробника, розміщеними в упаковці або оболонці з термоформованого пластикового матеріалу. Ця оболонка забезпечується корпусом для конденсатора 4, розташованого у відомому положенні, наприклад в межах конуса кута 60°. Проте, може відбутися, що удари, трясіння і подібні рухи протягом транспортування, можуть змінити положення конденсатора 4. Як відомо, з цієї причини неможливо використовувати цю інформацію, але є прийнятна вірогідність, що конденсатор все ще буде розташований в правильній півплощині. В даному випадку матиме місце вільне обертання, як викладено вище, якщо сенсор запуску не почне діяти. Згодом електромотор 1 обертається у зумовленому напряму обертання на привідному валу 3 з компенсуючим кутом γ, в залежності від кута корекції α і кута зупинки β, так щоб наводити засобі позиціонування 12а електромотора 1 на таке кутове положення, що дозволить зчепити узгоджуючи засоби позиціонування 10а, коли електромотор 1 розташований на підставці для мотора 5. Фігури 4-6 показують втілення способу згідно з даним варіантом винаходу, із специфічним посиланням на ситуацію, в якій наявні кутові зупиняючі засоби 35. Розміри електромотора 1, конденсатора 4, засобів кутової зупинки 35 і 81815 10 засобів позиціонування 12а на Фігурах 4-6 знехтувані. Як показано на Фігурі 5, електромотор 1 обертається проти годинникової стрілки на привідному валу 3 з компенсуючим кутом γ, що дорівнює різниці між кутом корекції α і кутом зупинки β. Вигідно, коли кут корекції α дорівнює 120° і кут зупинки β-15°. У особливо вигідному варіанті втілення кут корекції рівний 180°, щоб оптимізувати робота ЗО, коли електромотор 1 обертається на привідному валу 3. На подальшому етапі способу згідно з даним винаходом, електромотор 1 кріпиться на підставку для мотора 5 таким чином, що проводиться взаємоблокуюче з'єднання між засобами позиціонування 11а і 12а електромотора 1 і засобами позиціонування 9а і 10а підставки для мотора 5. Правильно вставлений на доставку для мотора 5 електромотор 1 протидіє обертуГщо передається, наприклад, роботом 30, який намагається обертати далі конструкцію 2 електромотора 1 на осі обертання Х-Х. Таким чином робот 30 виявляє пару сил, що протидіє спробі обертатися електромотора 1, правильно закріпленому і розташованому на підставці для мотора 5. Як тільки опорне значення пари перевищене, розглядається, чи взаємоблокуючє з'єднання між засобами позиціонування 9а і 10а підставки для мотора 5 і засобами позиціонування 11а і 12а електромотора 1 дійсне. Електромотор 1 може кріпитися на підставці для мотора 5 різними способами. Згідно з переважним варіантом втілення, електромотор 1 піднятий з підставок 32 і 33 роботом 30, або іншим роботом, і переміщений в бік відносно підставки для мотора 5, попередньо зібраної забірним жолобом 22, вставленим на піддоні 36. Слід пам'ятати, щоб уникнути зміщення осей між засобами позиціонування 12а мотора 1 розташований в кутовому положенні, такому, щоб дозволити взаємоблокуюче з'єднання з відповідними узгоджуючими засобами позиціонування 10а в підставці для мотора 5, необхідно для бічного переміщення запобігати обертанню електромотора 1 на привідному валу 3. Ця операція проводиться до деякої міри, яка відома роботу 30 як така. Нарешті, електромотор 1 стійко закріплений на підставці для мотора 5, застосовуючи дві пластини з гнучкої сталі 13. Пластини 13 прийняті від утримувача двома аплікаторами, які відповідно сформовані еластичною пластиною 13, які притискають пластину 13 на амортизаторах 11 і 12 електромотора 1. Пластини, вставлені таким чином, охоплюються зчеплюючими тримачами 14 оснащеними на підставці для мотора 5. Якщо електромотор 1 використовується з конвектором вентилятора, електромотор 1 доведеться зібрати з парою вентиляторів. Ця робота переважно здійснюється перед етапом обертання електромотора 1 на компенсуючий кут γ. 11 Спосіб для зборки електромотора 1 з вентилятором, наприклад, з вентилятором 20, на частину привідного валу 3, описаного нижче, і спосіб для зборки вентилятора на протилежній частині очевидно еквівалентні. У специфічній втулці 38 вентилятор^ 20 закріплений до привідного валу 3 за допомогою нерухомої посадки. Електромотор 1, розташований на операційний одиниці 31, підтримується підставками 32 і 33 з конденсатором 4, сполучаючись впритул напроти кутових зупиняючих засобів 35. Привідний вал 3 запущений, наприклад роботом 30, аксіально у напряму осі обертання ХХ так, щоб примусити сполучитися упритул напроти осьового стопору 37. Таким чином лінійне положення електромотора 1 стає відомим, на додаток до кутового положення. Ця операція необхідна за тим фактом, що електромотори можуть мати різні розміри привідного валу і тому необхідно знати положення, до якого вентилятор 20 має бути притиснутим на привідному валу 3. Згодом підставки 32 і 33 закріплюють привідний вал 3, аксіально фіксуючи привідний вал уздовж осі обертання Х-Х. Ця операція здійснюється, наприклад, затискаючими засобами, закріпленими на кінцях підставок 32 і 33 (Фігура 3), і необхідно запобігати пошкодженням ротора електромотора під час подальшого етапу закріплення. Вентилятор 20 підтримується і керується у відповідності до привідного валу З допоміжним валом 39, розташованим уздовж осі обертання ХХ, який є повністю співвісним з привідним валом 3. Через два елементи пускача 41, вентилятор 20 запускається аксіально до привідного валу у напрямі осі обертання Х-Х до зберігаючої втулки 38 вентилятора 20 на привідному валу 3 за допомогою нерухомої посадки. Елементи пускача справляють, наприклад, натиск 30 Кг для того, щоб гарантувати правильну зборку. Як тільки мотор 1 буде зібраний з вентилятором 20, робот 30 тоді кріпить електромотор 1 на підставку для мотора 5. Як видно з вищеописаного, спосіб для кріплення і розташування електромотора на підставку для мотора згідно з даним винаходом дозволяє задовольнити вимоги і подолати незручності, згадані у ввідній частині цього опису з посиланням на відомий рівень техніки. Переваги, що отримані від використання способу згідно з даним винаходом полягають переважно у факті, що вони допомагають автоматизації зборки електромотора 1 на підставку для мотора 5 згідно з винаходом. На додаток до цього, відсутність додаткових складових, маси яких розподілялись би несиметрично, дозволяє досягти кращого динамічного балансування системи мотор/вентилятор. 81815 12 13 81815 14
ДивитисяДодаткова інформація
Назва патенту англійськоюAn electric motor with a seat (variants) and method for its position and fastening (variants)
Автори англійськоюRiello Valerio Giordano
Назва патенту російськоюЭлектромотор с подставкой (варианты) и способ его расположения и крепления (варианты)
Автори російськоюРиелло Валерио Джордано
МПК / Мітки
МПК: H02K 15/00, H02K 5/00
Мітки: підставкою, електромотор, варіанти, спосіб, кріплення, розташування
Код посилання
<a href="https://ua.patents.su/7-81815-elektromotor-z-pidstavkoyu-varianti-i-sposib-jjogo-roztashuvannya-i-kriplennya-varianti.html" target="_blank" rel="follow" title="База патентів України">Електромотор з підставкою (варіанти) і спосіб його розташування і кріплення (варіанти)</a>
Кріплення гірничих виробок та спосіб його зведення (варіанти)
Номер патенту: 77397
Опубліковано: 15.12.2006
Автори: Зиненко Сергій Борисович, Картавих Віктор Геннадійович, Картавих Геннадій Йосипович, Куклін Володимир Юрієвич, Пундик Микола Семенович
МПК: E21D 11/08
Мітки: гірничих, кріплення, виробок, зведення, спосіб, варіанти
Формула / Реферат:
1. Кріплення для гірничих виробок, що містить рами кріплення з бетонітів ромбовидної форми з отворами для установки болтів та клиноподібного замкового бетоніту, яке відрізняється тим, що рами кріплення складаються з трапецієподібних блоків у формі жолоба, дно останнього з'єднує рівні паралельні грані стінок, а торцеві частини дна можуть бути клиноподібними чи повторювати трапецієподібну конфігурацію, при цьому паралельні грані...
Спосіб кріплення та розташування універсального рекламного носія “мах воаrd”
Номер патенту: 29446
Опубліковано: 10.01.2008
Автор: Гостіщева Оксана Олександрівна
МПК: G09F 23/00, G09F 21/00
Мітки: мах, розташування, носія, спосіб, універсального, воаrd, кріплення, рекламного
Формула / Реферат:
1. Спосіб кріплення та розташування універсального рекламного носія, що включає розташування рекламного універсального носія (РУН) на спинці сидіння громадського транспорту, який відрізняється тим, що рекламний універсальний носій додатково розміщений на доступній до огляду внутрішній поверхні транспортного засобу, при цьому кріплення універсального рекламного носія здійснюють за допомогою механічних засобів, а розміщення універсально...
Зажим для кріплення світильника (його варіанти)
Номер патенту: 22255
Опубліковано: 03.02.1998
Автор: Казакєвіч Алєксандр Вільямовіч
МПК: F21V 21/08
Мітки: світильника, кріплення, зажим, варіанти, його
Формула / Реферат:
1. Зажим для крепления светильника, содержащий два захвата, соединенных с возможностью сближений, подпружиненных друг к другу и удлиненных рукоятками, отличающийся тем, что захваты оснащены приспособлениями для хранения мелких предметов и (или) выключателем светильника.2. Зажим для крепления светильника, содержащий два захвата, соединенных с возможностью сближения, подпружиненных друг к другу и удлиненных рукоятками, отличающийся тем,...
Збруйне кріплення з сечозбірником (варіанти), сечозбірник та його верхня частина
Номер патенту: 71970
Опубліковано: 17.01.2005
Автор: Фрінк Мартін
МПК: A01K 13/00, A01K 23/00
Мітки: збруйне, сечозбірник, сечозбірником, частина, кріплення, варіанти, верхня
Формула / Реферат:
1. Збруйне кріплення з сечозбірником для коней, насамперед кобил, яке відрізняється тим, що маєA) основну збруйну частину з ременів, що має- попружний ремінь (1), який охоплює коня з обох боків і який проходить від спини до підгрудка, до якого в кожній з верхніх бокових частин з деяким відступом один від одного прикріплені принаймні по два звичайні регульовані по довжині кріпильні елементи (1а),- нагрудний ремінь (2), що...
Пристрій для збирання емболів (варіанти) і спосіб відбору емболів (варіанти)
Номер патенту: 67812
Опубліковано: 15.07.2004
Автор: Ріхтер Якоб
МПК: A61F 2/01
Мітки: спосіб, емболів, варіанти, відбору, пристрій, збирання
Формула / Реферат:
1. Пристрій для збирання емболів, які проходять через просвіт, який включає мотор, який має проксимальний кінець і дистальний кінець, де мотор має поздовжній внутрішній канал і забезпечений фрикційною областю, розташованою всередині поздовжнього каналу, при цьому фрикційна область мотора призначена для забезпечення вибірного переміщення мотора навколо поздовжньої осі направляючого проводу, розташованого в поздовжньому каналі; направляючий...
Попередній патент: Гідроакумулююча електрична станція
Наступний патент: Протиспінювальні композиції
Випадковий патент: Спосіб отвердіння епоксидного зв'язуючого, модифікованого 2-тіоціанато-2-метил-3-(4-тіоціанатофеніл)пропанамідом