Спосіб та пристрій для зв`язку з супутниками глобального місцевизначення
Номер патенту: 84002
Опубліковано: 10.09.2008
Автори: Рахмат Арі, Бхатіа Ашок, Джонсон Пол К., Саламан Гленн, Джоши Абхай А., Рістіч Боріслав, Нойфельд Артур Дж., Рох Марк Чарльз
Формула / Реферат
1. Спосіб зв'язку з супутниками глобального місцевизначення за допомогою безпровідного віддаленого пристрою, що включає в себе приймач і внутрішній генератор тактових імпульсів, який полягає в тому, що в перший момент часу здійснюють настройку приймача на пілот-сигнал, який має частоту пілот-сигналу і передається з першої базової станції зв'язку; приймають за допомогою приймача пілот-сигнал з першої базової станції зв'язку у відповідь на етап настройки приймача на пілот-сигнал; синхронізують внутрішній генератор тактових імпульсів пілот-сигналом у відповідь на етап прийому пілот-сигналу; у другий момент часу, відмінний від першого моменту часу, здійснюють настройку приймача на щонайменше один сигнал супутника, який має частоту супутника, відмінну від частоти пілот-сигналу, і передається з щонайменше одного супутника в супутниковій системі місце визначення (SPS), у відповідь на етап синхронізації; і приймають за допомогою приймача згаданий щонайменше один сигнал супутника із згаданого щонайменше одного супутника у відповідь на етап настройки приймача на згаданий щонайменше один сигнал супутника.
2. Спосіб за п. 1, в якому етап синхронізації додатково включає в себе етап, на якому оновлюють щонайменше один з нижченаведених параметрів внутрішнього генератора тактових імпульсів: частоту тактових імпульсів і час доби.
3. Спосіб за п. 1, в якому додатково оцінюють, що синхронізація внутрішнього генератора тактових імпульсів пілот-сигналом менш точна, ніж синхронізація внутрішнього генератора тактових імпульсів згаданим щонайменше одним сигналом супутника, у відповідь на етап прийому згаданого щонайменше одного сигналу супутника; і синхронізують внутрішній генератор тактових імпульсів згаданим щонайменше одним сигналом супутника у відповідь на етап оцінки.
4. Спосіб за п. 1, в якому додатково приймають запит на прийом згаданого щонайменше одного сигналу супутника, визначають, що безпровідний віддалений пристрій не настроєний в даний момент на інший сигнал, у відповідь на етап прийому запиту; оцінюють, що перша тривалість першого періоду часу, необхідного для виконання етапів настройки на пілот-сигнал, прийому пілот-сигналу, синхронізації, настройки на згаданий щонайменше один сигнал супутника, і прийому згаданого щонайменше одного сигналу супутника, менша, ніж друга тривалість другого періоду часу, на якому планують виконання безпровідним віддаленим пристроєм етапу настройки на пілот-сигнал у відповідь на прийом згаданого запиту; і виконують етапи настройки на пілот-сигнал, прийому пілот-сигналу, синхронізації, настройки на згаданий щонайменше один сигнал супутника, і прийому згаданого щонайменше одного сигналу супутника у відповідь на етапи визначення і оцінки.
5. Спосіб за п. 4, в якому етап оцінки додатково включає в себе етап, на якому використовують щонайменше одну недавню оцінку першої тривалості першого періоду часу.
6. Спосіб за п. 4, в якому додатково запобігають демодуляції даних під час етапу прийому пілот-сигналу.
7. Спосіб за п. 1, в якому додатково в третій момент часу, відмінний від першого моменту часу або другого моменту часу, здійснюють настройку приймача на сигнал даних, що має частоту даних, відмінну від частоти пілот-сигналу і частоти супутника, і що передається з другої базової станції зв'язку; і приймають за допомогою приймача сигнал даних з другої базової станції зв'язку у відповідь на етап настройки на сигнал даних
8. Спосіб за п. 7, в якому перша базова станція зв'язку і друга базова станція зв'язку є однією і тією ж або різними базовими станціями зв'язку.
9. Спосіб за п. 7, в якому другий момент часу знаходиться між першим моментом часу і третім моментом часу.
10. Спосіб за п. 1, в якому додатково очікують прийом пілот-сигналу в запланований момент часу, при цьому етап настройки на пілот-сигнал виконують у відповідь на етап очікування.
11. Спосіб за п. 1, в якому згаданий щонайменше один сигнал супутника кодують по схемі кодування множинного доступу з кодовим розділенням каналів (CDMA).
12. Спосіб за п. 1, в якому пілот-сигнал кодують по схемі кодування множинного доступу з кодовим розділенням каналів (CDMA).
13. Спосіб за п. 1, в якому пілот-сигнал приймають під час інтервального зв'язку пошукового виклику.
14. Спосіб за п. 1, в якому додатково обробляють інформацію місцеположення, що відображає місцеположення безпровідного віддаленого пристрою, у відповідь на етап синхронізації і прийому згаданого щонайменше одного сигналу супутника.
15. Спосіб за п. 1, в якому етап настройки приймача на щонайменше один сигнал супутника виконують зразу ж після завершення етапу синхронізації.
16. Безпровідний віддалений пристрій для зв'язку з супутниками глобального місцевизначення, що містить тюнер для здійснення в перший момент часу настройки приймача на пілот-сигнал, який має частоту пілот-сигналу і який передається з першої базової станції зв'язку; і здійснення у другий момент часу, відмінний від першого моменту часу, настройки приймача на щонайменше один сигнал супутника, який має частоту супутника, відмінну від частоти пілот-сигналу, і передається з щонайменше одного супутника в супутниковій системі місце визначення (SPS); приймач для прийому пілот-сигналу з першої базової станції зв'язку у відповідь на настройку тюнером приймача на пілот-сигнал; прийом згаданого щонайменше одного сигналу супутника із згаданого щонайменше одного супутника у відповідь на настройку тюнером приймача на згаданий щонайменше один сигнал супутника; внутрішній генератор тактових імпульсів для видачі інформації про тактування; процесор для синхронізації внутрішнього генератора тактових імпульсів пілот-сигналом у відповідь на прийом пілот-сигналу приймачем.
17. Безпровідний віддалений пристрій за п. 16, в якому інформація про тактування додатково містить щонайменше один з нижченаведених параметрів: частоту тактових імпульсів і час доби.
18. Безпровідний віддалений пристрій за п. 16, в якому згаданий щонайменше один сигнал супутника закодований по схемі кодування множинного доступу з кодовим розділенням каналів (CDMA).
19. Безпровідний віддалений пристрій за п. 16, в якому пілот-сигнал закодований по схемі кодування множинного доступу з кодовим розділенням каналів (CDMA).
Текст
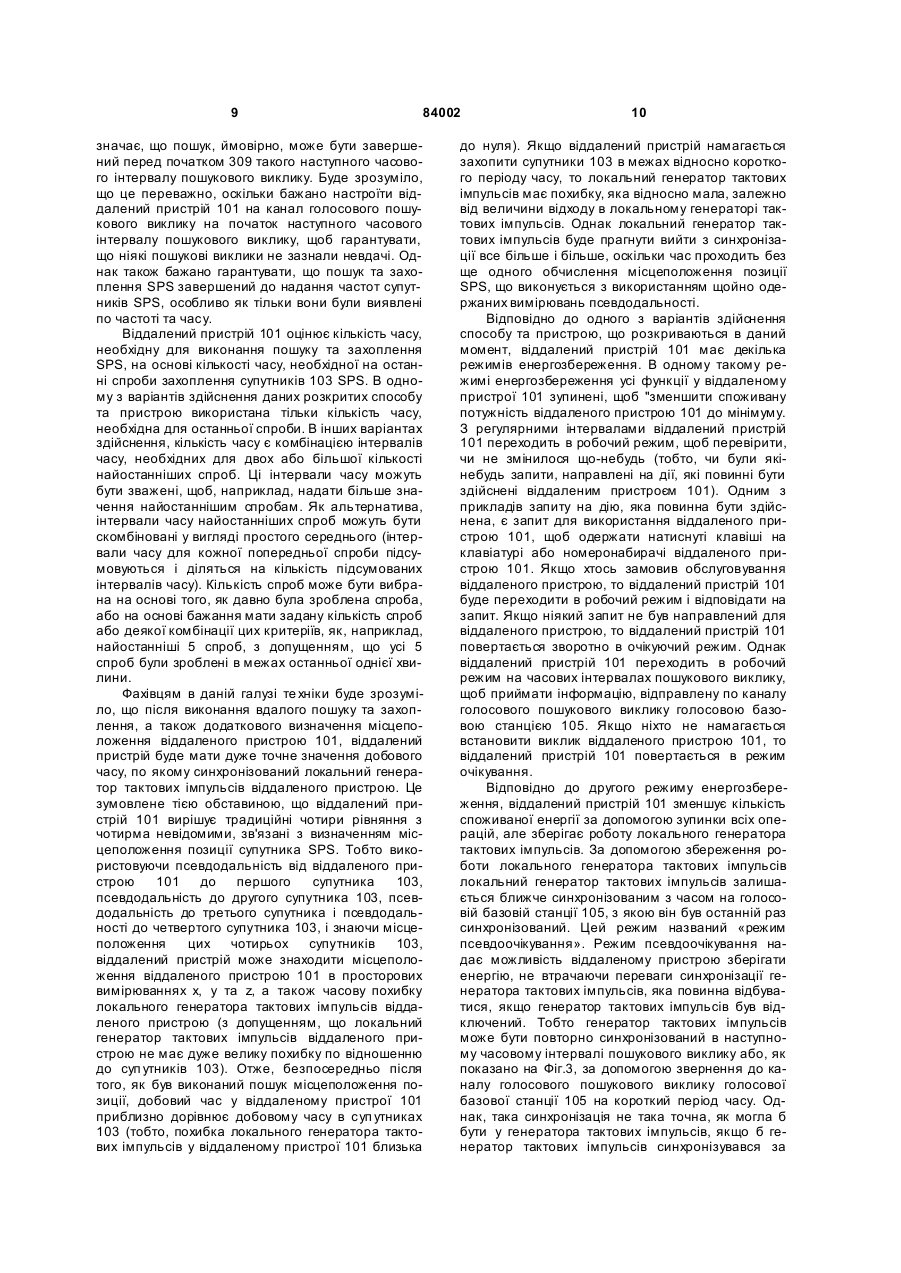
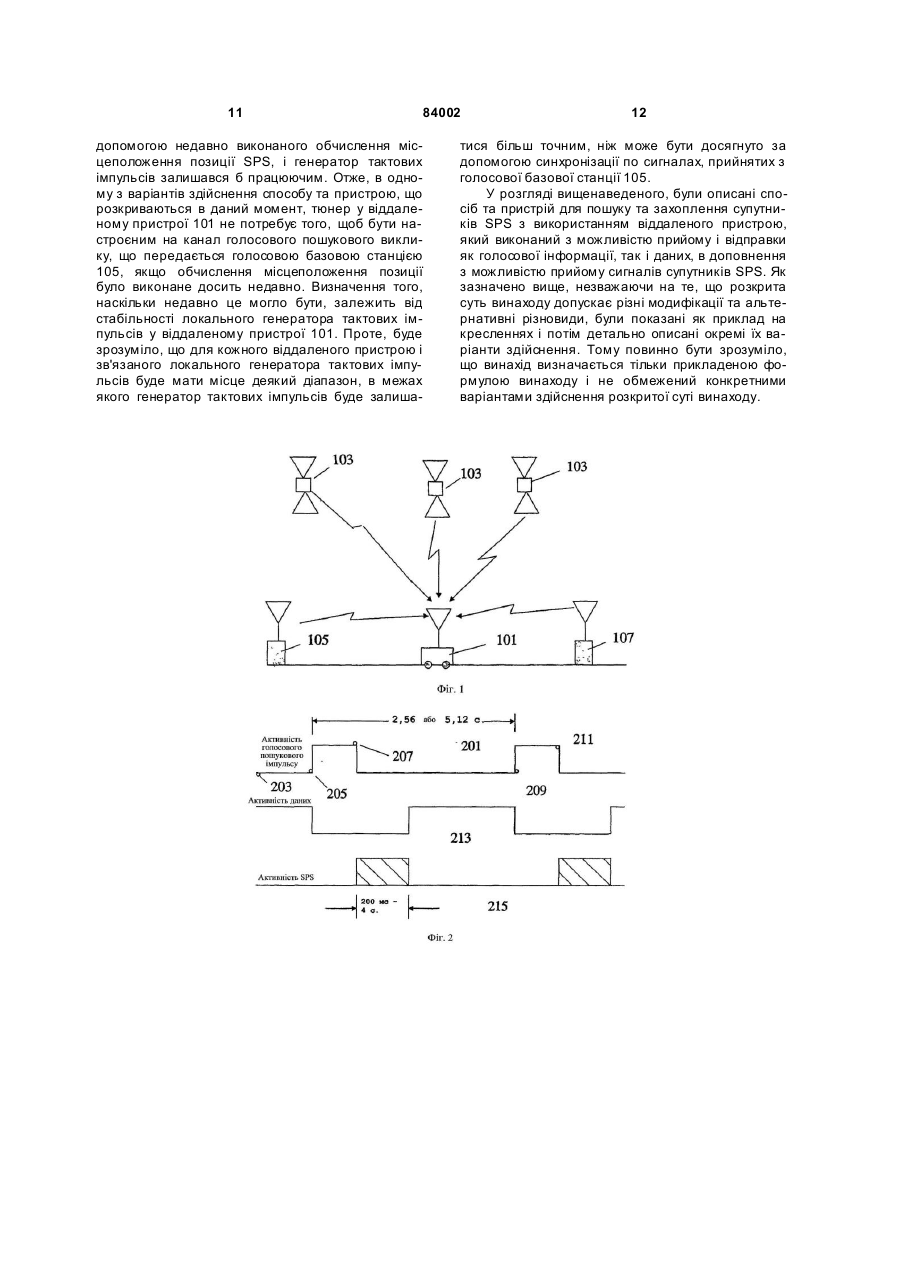
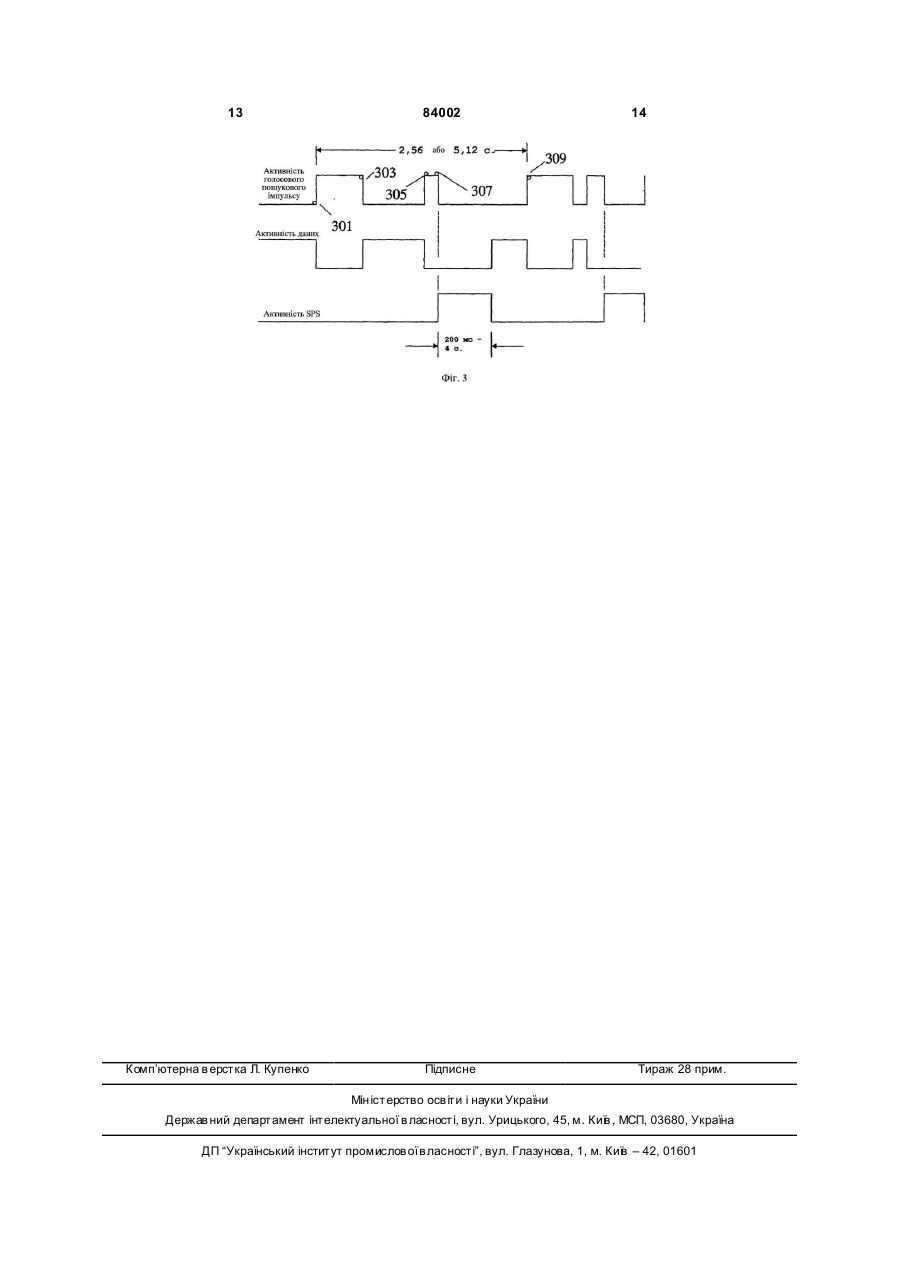
1. Спосіб зв'язку з супутниками глобального місцевизначення за допомогою безпровідного віддаленого пристрою, що включає в себе приймач і внутрішній генератор тактових імпульсів, який полягає в тому, що в перший момент часу здійснюють настройку приймача на пілот-сигнал, який має частоту пілот-сигналу і передається з першої базової станції зв'язку; приймають за допомогою приймача пілот-сигнал з першої базової станції зв'язку у відповідь на етап настройки приймача на пілот-сигнал; синхронізують внутрішній генератор тактових імпульсів пілот-сигналом у відповідь на етап прийому пілот-сигналу; у другий момент часу, відмінний від першого моменту часу, здійснюють настройку приймача на щонайменше один сигнал суп утника, який має частоту суп утника, відмінну від частоти пілот-сигналу, і передається з щонайменше одного супутника в суп утниковій системі місце визначення (SPS), у відповідь на етап синхронізації; і приймають за допомогою приймача згаданий щонайменше один сигнал супутника із згаданого щонайменше одного супутника у відповідь на етап настройки приймача на згаданий що2. Спосіб за п. 1, в якому етап синхронізації додатнайменше один сигнал супутника. ково включає в себе етап, на якому оновлюють щонайменше один з нижченаведених параметрів внутрішнього генератора тактових імпульсів: частоту тактових імпульсів і час доби. 2 (19) 1 3 84002 4 8. Спосіб за п. 7, в якому перша базова станція зв'язку і друга базова станція зв'язку є однією і тією ж або різними базовими станціями зв'язку. 9. Спосіб за п. 7, в якому другий момент часу знаходиться між першим моментом часу і третім моментом часу. 10. Спосіб за п. 1, в якому додатково очікують прийом пілот-сигналу в запланований момент часу, при цьому етап настройки на пілот-сигнал виконують у відповідь на етап очікування. 11. Спосіб за п. 1, в якому згаданий щонайменше один сигнал супутника кодують по схемі кодування множинного доступу з кодовим розділенням каналів (CDMA). 12. Спосіб за п. 1, в якому пілот-сигнал кодують по схемі кодування множинного доступу з кодовим розділенням каналів (CDMA). 13. Спосіб за п. 1, в якому пілот-сигнал приймають під час інтервального зв'язку пошукового виклику. 14. Спосіб за п. 1, в якому додатково обробляють інформацію місцеположення, що відображає місцеположення безпровідного віддаленого пристрою, у відповідь на етап синхронізації і прийому згаданого щонайменше одного сигналу супутника. 15. Спосіб за п. 1, в якому етап настройки приймача на щонайменше один сигнал супутника виконують зразу ж після завершення етапу синхронізації. 16. Безпровідний віддалений пристрій для зв'язку з суп утниками глобального місцевизначення, що містить тюнер для здійснення в перший момент часу настройки приймача на пілот-сигнал, який має частоту пілот-сигналу і який передається з першої базової станції зв'язку; і здійснення у другий момент часу, відмінний від першого моменту часу, настройки приймача на щонайменше один сигнал супутника, який має частоту супутника, відмінну від частоти пілот-сигналу, і передається з щонайменше одного супутника в супутниковій системі місце визначення (SPS); приймач для прийому пілот-сигналу з першої базової станції зв'язку у відповідь на настройку тюнером приймача на пілот-сигнал; прийом згаданого щонайменше одного сигналу супутника із згаданого щонайменше одного суп утника у відповідь на настройку тюнером приймача на згаданий щонайменше один сигнал суп утника; внутрішній генератор тактових імпульсів для видачі інформації про тактування; процесор для синхронізації внутрішнього генератора тактових імпульсів пілот-сигналом у відповідь на прийом пілот-сигналу приймачем. 17. Безпровідний віддалений пристрій за п. 16, в якому інформація про тактування додатково містить щонайменше один з нижченаведених параметрів: частоту тактових імпульсів і час доби. 18. Безпровідний віддалений пристрій за п. 16, в якому згаданий щонайменше один сигнал супутника закодований по схемі кодування множинного доступ у з кодовим розділенням каналів (CDMA). 19. Безпровідний віддалений пристрій за п. 16, в якому пілот-сигнал закодований по схемі кодування множинного доступу з кодовим розділенням каналів (CDMA). Даний винахід відноситься загалом до галузі техніки безпровідного зв'язку, і більш точно, до пристрою для планування пошуку та захоплення суп утників глобального місцевизначення та способів для цього. Даний винахід, який направлений на цю потребу, відноситься до безпровідного віддаленого пристрою і способу для нього. Безпровідний віддалений пристрій та спосіб, описані в цьому документі, забезпечують переваги над відомими технологіями пошуку та захоплення, в яких вони забезпечують зменшений час пошуку для захоплення супутників супутникової системи місцевизначення (SPS). За допомогою здійснення спроби приймати сигнали супутника SPS безпосередньо після часового інтервалу пошукового виклику, протягом якого генератор тактових імпульсів віддаленого пристрою був син хронізований по каналу пілот-сигналу, зменшений «час пошуку», необхідний для «захоплення» сигналів суп утника SPS. Інші задачі та переваги винаходу стануть очевидними при прочитанні подальшого докладного опису з посиланням на наступні супутні креслення. Фіг.1 ілюструє систему, в якій безпровідний віддалений пристрій 101 приймає сигнали від трьох різних джерел. Фіг.2 - часова діаграма, що показує відносний розподіл часових інтервалів приймача у віддаленому пристрої. Фіг.3 - часова діаграма, що ілюструє тюнер у віддаленому пристрої, настроєний на прийом каналу пошукового виклику від голосової базової станції 105, коли віддалений пристрій дізнається про необхідність здійснити пошук та захоплення сигналів супутника SPS. Незважаючи на те, що суть винаходу, що розкривається, допускає різні модифікації та альтернативні різновиди, були показані як приклад на кресленнях і будуть детально описані його окремі варіанти здійснення. Тому повинно бути зрозуміло, що винахід визначений тільки прикладеною формулою винаходу і не обмежений конкретними варіантами здійснення суті винаходу, що розкривається. Фіг.1 ілюструє систему, в якій безпровідний віддалений пристрій 101 приймає сигнали від трьох різних джерел. Віддалений пристрій може бути звичайного зразка, який має логічну і керуючу схемотехніку і радіочастотну схемотехніку для виконання функцій віддаленого пристрою. Першим джерелом є група (сукупність) супутників 103 супутникової системи місцевизначення (SPS). Другим джерелом є супутникова базова станція (що далі згадується як голосова базова станція 105), що передає голосову інформацію, таку як в системі множинного доступу з кодовим розділенням каналів CDMA 2000 IX відповідно до стандарту IS-2000 (міжнародного стандарту 2000) Асоціації промисловості засобів зв'язку (TIA). Третім джерелом є 5 84002 суп утникова базова станція (що далі згадується як базова станція 107 даних). Базова станція 107 даних передає пакети даних, такі як ті, що передаються відповідно до CDMA 2000 EV-D V, як визначено в публікації IS-2000 TIA. Потрібно зазначити, що в деяких випадках та ж базова станція може бути використана, щоб передавати як мовні сигнали, так і сигнали даних. Фіг.2 - часова діаграма, що показує відносний розподіл часових інтервалів приймача у віддаленому пристрої. Приймач виконаний з можливістю настройки на будь-яке з трьох джерел 103, 105, 107 зв'язку. Лінія 201 активності голосового пошукового виклику вказує, коли приймач в межах віддаленого пристрою настроєний на прийом сигналів пошукового виклику від голосової базової станції 105. Подібним чином, лінія 213 активності даних показує, чи настроєний тюнер на прийом сигналів від базової станції даних, а лінія 215 активності SPS показує, чи настроєний тюнер у віддаленому пристрої 101 на прийом сигналів від сукупності супутників SPS. У першій точці в момент часу 203 тюнер настроєний на прийом сигналів від базової станції 107 даних. Оскільки тюнер виконаний з можливістю настройки тільки на одне з трьох можливих джерел сигналу, повинно бути зрозуміло, що тюнер не буде настроєний на прийом будь-якого з суп утникових сигналів від супутників в межах сукупності супутників SPS або від голосової базової станції 105. Це вказано тим фактом, що лінія 201 активності голосового пошукового запиту і лінія активності SPS обидві знаходяться в стані з низьким рівнем. Цей стан представляє моменти часу, в які віддалений пристрій 101 приймає сигнали даних по каналу тра фіка даних від базової станції 107 даних. У другій точці в момент часу 205 буде з'являтися запланований часовий інтервал пошукового виклику, під час якого сигнали передаються від голосової базової станції 105 у віддалений пристрій 101. Ці сигнали показують, чи намагається ще один пристрій (звичайний телефон або інший такий пристрій) встановити виклик до віддаленого пристрою 101. Для того щоб гарантувати успішні спроби встановити виклик до віддаленого пристрою 101, бажано перевіряти ці вхідні сигнали голосового пошукового виклику в кожному запланованому часовому інтервалі пошукового виклику. Відповідно, тюнер у віддаленому пристрої 101 настроєний на канал голосового пошукового виклику, що передається від голосової базової станції 105. Як згадано раніше, це означає, що тюнер у віддаленому пристрої 101 вже не буде настроєний на базову станцію 107 даних, що указано тим, що лінія 213 активності даних переходить в стан з низьким рівнем в точці 205, в якій лінія 201 активності голосового пошукового виклику переходить в стан з високим рівнем. Потрібно зазначити, що лінія 215 активності SPS залишається в стані з низьким рівнем. Протягом часу, за який приймач приймає сигнали пошукового виклику від голосової базової станції 105, віддалений пристрій 101 також приймає сигнали по каналу пілот-сигналу, що переда 6 ється голосовою базовою станцією 201. Віддалений пристрій 101 синхронізує внутрішній генератор тактових імпульсів по каналу пілот-сигналу. Канал пілот-сигналу передається на тій самій частоті, що і канал пошукового виклику, що передається від голосової базової станції 105. У цей момент потрібно зазначити, що інформація, яка передається голосовою базовою станцією 105, в тому випадку, коли працює відповідно до схеми передачі з множинним доступом і кодовим розділенням каналів (CDMA), розділена по окремих каналах передачі за допомогою кодування кожного каналу індивідуальним кодом. Наприклад, канал пошукового виклику кодований з використанням конкретного коду. Канал трафіка кодований з використанням іншого коду. Канал пілот-сигналу кодований з використанням ще одного коду. Отже, кожний з цих каналів може бути використаний, щоб передавати різну інформацію одночасно на одній і тій самій частоті. Це надає можливість тюнеру віддаленого пристрою 101 бути настроєним на канал пілотсигналу, що передається від голосової базової станції 105, при цьому також приймаючи сигнали, які передаються по каналу пошукового виклику, що передається від голосової базової станції 105 на цій самій частоті. Частота сигналів, що передаються по каналу пілот-сигналу, дуже строго контролюється. Отже, за допомогою синхронізації генератора тактових імпульсів на віддаленому пристрої 101 каналом пілот-сигналу (тобто, по частоті пілот-сигналу, що передається по каналу пілот-сигналу), дуже строго контролюється частота генератора тактових імпульсів. У доповнення, дуже точна інформація, що вказує добовий час, також передається голосовою базовою станцією 105 і приймається віддаленим пристроєм 101 протягом часового інтервалу пошукового виклику. Отже, локальний генератор тактових імпульсів, що підтримується у віддаленому пристрої 101, оновлюється як каліброваною частотою, так і інформацією добового часу. В ідеальному випадку, добовий час буде точно таким, як і добовий час, вказаний генераторами тактових імпульсів в кожному із супутників сукупності SPS. Однак в цей час потрібно зазначити, що існують два фактори, які роблять добовий час меншим, ніж ідеальний. Перший - кількість часу, необхідна сигналу, щоб поширюватися від голосової базової станції 105 до віддаленого пристрою 101 (тобто затримка поширення). Навіть представляючи, що сигнали йдуть із швидкістю світла, відстані досить великі, щоб створювати значну затримку у часі між передачею та прийомом. Другий фактор - неточність генератора тактових імпульсів на голосовій базовій станції. Добовий час, переданий від голосової базової станції 105, є точним усього лише настільки, наскільки точний локальний генератор тактових імпульсів, який підтримує час в голосовій базовій станції 105. Оскільки локальний генератор тактових імпульсів в голосовій базовій станції 105 синхронізується по генераторах тактових імпульсів в суп утниках 103 SPS, то генератор тактових імпульсів буде відходити за час між моментами часу синхронізації. 7 84002 Незважаючи на неточність добового часу, що приймається віддаленим пристроєм 101, локальний генератор тактових імпульсів у віддаленому пристрої 101 більшою мірою точний безпосередньо після синхронізації, яка відбувається протягом часового інтервалу пошукового виклику. Таким чином, відповідно до одного з варіантів здійснення способу та пристрою, що розкриваються в даний момент, прийом даних по каналу даних від базової станції 107 даних затриманий трохи довше, оскільки тюнер у віддаленому пристрої 101 настроєний на супутники 103 SPS. Це показано на Фіг.2 за допомогою лінії 201 активності голосового пошукового виклику, яка переходить в стан з низьким рівнем в момент часу 207 (що вказує закінчення часового інтервалу пошукового виклику). У цей момент часу 207 тюнер у віддаленому пристрої 101 настроєний на частоту супутників 103 SPS, як показано лінією 215 активності SPS, яка переходить в стан з високим рівнем в момент часу 207. Повинно бути зрозуміло, що усі супутники SPS, описані в цьому документі, працюють в режимі CDMA, так що усі суп утники 103 в межах сукупності SPS передають свою інформацію на одній і тій самій частоті. Кожному супутнику призначений унікальний код, який надає можливість приймачу у віддаленому пристрої 101 знаходити відмінності між сигналами, що передаються кожним конкретним супутником 103. Через те, що тюнер у віддаленому пристрої 101 настроюється на супутники 103 SPS безпосередньо після часового інтервалу пошукового виклику, пошук суп утників робиться більш коротким. Тобто, для того щоб приймати сигнали від супутників 103 SPS, віддалений пристрій 101 повинен визначити, на яку точну частоту настроюватися і який момент часу зв'язаний з генераторами тактових імпульсів, які працюють на супутниках 103 SPS. Необхідно зазначити, що оскільки частота, що передається супутниками 103 SPS, відносно точна, відносний рух супутників відносно віддаленого пристрою 101 викликає доплеровський зсув по частоті, яка приймається у віддаленому пристрої 101. Проте, віддаленому пристрою 101 бажано мати інформацію, з якої він може визначити частоту, на якій він збирається приймати сигнали суп утника SPS. Однак якщо генератор тактових імпульсів у віддаленому пристрої 101 не калібрований, то генератор тактових імпульсів повинен підстроюватися кожний раз, коли спроба прийняти сигнали супутника SPS не досягає успіху. Чим більш неточний генератор тактових імпульсів у віддаленому пристрої 101, тим більша кількість разів спроби прийняти сигнали супутника SPS не будуть досягати успіху. Отже, за допомогою спроби прийняти сигнали супутника SPS безпосередньо після того, як генератор тактових імпульсів був синхронізований по каналу пошукового виклику голосової базової станції 105, «час пошуку», необхідний, щоб «захопити» сигнали супутника SPS, зменшується. У доповнення, якщо результати пошуку SPS повинні бути використані спільно з результатами пошуку з більш раннього пошуку (тобто, вимірювання псевдодальності виконувалися протягом попереднього періоду пошук у суп утника 8 SPS), то похибка локального генератора тактових імпульсів (тобто, помилка в місці, яка стосується часу, що підтримується супутниками SPS) буде відносно постійною, оскільки генератор тактових імпульсів буде синхронізований з генераторами тактових імпульсів на базовій станції з відносно постійною похибкою. Фахівці в даній галузі те хніки братимуть до уваги корисний результат вимірювань псевдодальності, які містять постійну похибку. Може бути відносно довгим період часу між моментом часу, коли запит на виконання пошуку SPS приймається віддаленим пристроєм 101, і закінченням часового інтервалу пошукового виклику. Тому, в ще одному варіанті здійснення способу та пристрою, що розкриваються, тюнер у віддаленому пристрої 101 настроєний на прийом каналу пошукового виклику від голосової базової станції 105, коли віддалений пристрій 101 дізнається про необхідність відшукувати та захоплювати сигнали суп утника SPS. Часова діаграма, яка ілюструє цей варіант здійснення, показана на Фіг.3. Однак оскільки тюнер у віддаленому пристрої 101 не є настроєним на канал голосового пошукового виклику протягом часового інтервалу пошукового виклику, зв'язаного з віддаленим пристроєм 101, віддалений пристрій не потребує демодуляції даних по каналу пошукового виклику. Точніше, єдина функція, яка виконується, повинна синхронізувати локальний генератор тактових імпульсів і визначити правильний добовий час. Ці функції виконуються відносно швидко. Приклад по фіг.З ілюструє віддалений пристрій 101, що є настроєним на голосовий канал пошукового виклику в першій точці в момент часу 301, який є співпадаючим з початком часового інтервалу пошукового виклику. Отже, тюнер віддаленого пристрою 101 не настроєний ні на базову станцію 107 даних, ні на супутники 103 SPS. У другій точці в момент часу 303, який відбувається безпосередньо по закінченні часового інтервалу пошукового виклику, тюнер у віддаленому пристрої 101 знову настроюється на частоту, на якій передається сигнал від базової станції 107 даних. У третій точці в момент часу 305 (який може бути на деякій відносно неістотній часовій відстані після того, як віддалений пристрій приймає запит на виконання пошуку та захоплення SPS), тюнер віддаленого пристрою 101 настроюється так, щоб ще раз приймати сигнал по каналу голосового пошукового виклику, що передається голосовою базовою станцією 105. У четвертій точці в момент часу 307, як тільки локальний генератор тактових імпульсів віддаленого пристрою повторно синхронізується по опорному тактовому сигналу голосової базової станції 105, тюнер віддаленого пристрою настроїться так, щоб здійснювати пошук та захоплення сигналів, що передаються супутниками 103 SPS. Ця послідовність операцій займає від 200 мілісекунд до 4 секунд, залежно від якості сигналу (тобто рівня сигналу та інш.) сигналів супутника. Переважно, пошук буде виконуватися перед наступним часовим інтервалом пошукового виклику (який на Фіг.3 зустрічається в п'ятій точці в момент часу 309), якщо віддалений пристрій ви 9 84002 значає, що пошук, ймовірно, може бути завершений перед початком 309 такого наступного часового інтервалу пошукового виклику. Буде зрозуміло, що це переважно, оскільки бажано настроїти віддалений пристрій 101 на канал голосового пошукового виклику на початок наступного часового інтервалу пошукового виклику, щоб гарантувати, що ніякі пошукові виклики не зазнали невдачі. Однак також бажано гарантувати, що пошук та захоплення SPS завершений до надання частот супутників SPS, особливо як тільки вони були виявлені по частоті та часу. Віддалений пристрій 101 оцінює кількість часу, необхідну для виконання пошуку та захоплення SPS, на основі кількості часу, необхідної на останні спроби захоплення супутників 103 SPS. В одному з варіантів здійснення даних розкритих способу та пристрою використана тільки кількість часу, необхідна для останньої спроби. В інших варіантах здійснення, кількість часу є комбінацією інтервалів часу, необхідних для двох або більшої кількості найостанніших спроб. Ці інтервали часу можуть бути зважені, щоб, наприклад, надати більше значення найостаннішим спробам. Як альтернатива, інтервали часу найостанніших спроб можуть бути скомбіновані у вигляді простого середнього (інтервали часу для кожної попередньої спроби підсумовуються і діляться на кількість підсумованих інтервалів часу). Кількість спроб може бути вибрана на основі того, як давно була зроблена спроба, або на основі бажання мати задану кількість спроб або деякої комбінації цих критеріїв, як, наприклад, найостанніші 5 спроб, з допущенням, що усі 5 спроб були зроблені в межах останньої однієї хвилини. Фахівцям в даній галузі те хніки буде зрозуміло, що після виконання вдалого пошуку та захоплення, а також додаткового визначення місцеположення віддаленого пристрою 101, віддалений пристрій буде мати дуже точне значення добового часу, по якому синхронізований локальний генератор тактових імпульсів віддаленого пристрою. Це зумовлене тією обставиною, що віддалений пристрій 101 вирішує традиційні чотири рівняння з чотирма невідомими, зв'язані з визначенням місцеположення позиції супутника SPS. Тобто використовуючи псевдодальність від віддаленого пристрою 101 до першого супутника 103, псевдодальність до другого супутника 103, псевдодальність до третього супутника і псевдодальності до четвертого супутника 103, і знаючи місцеположення цих чотирьох супутників 103, віддалений пристрій може знаходити місцеположення віддаленого пристрою 101 в просторових вимірюваннях х, у та z, а також часову похибку локального генератора тактових імпульсів віддаленого пристрою (з допущенням, що локальний генератор тактових імпульсів віддаленого пристрою не має дуже велику похибку по відношенню до суп утників 103). Отже, безпосередньо після того, як був виконаний пошук місцеположення позиції, добовий час у віддаленому пристрої 101 приблизно дорівнює добовому часу в суп утниках 103 (тобто, похибка локального генератора тактових імпульсів у віддаленому пристрої 101 близька 10 до нуля). Якщо віддалений пристрій намагається захопити супутники 103 в межах відносно короткого періоду часу, то локальний генератор тактових імпульсів має похибку, яка відносно мала, залежно від величини відходу в локальному генераторі тактових імпульсів. Однак локальний генератор тактових імпульсів буде прагнути вийти з синхронізації все більше і більше, оскільки час проходить без ще одного обчислення місцеположення позиції SPS, що виконується з використанням щойно одержаних вимірювань псевдодальності. Відповідно до одного з варіантів здійснення способу та пристрою, що розкриваються в даний момент, віддалений пристрій 101 має декілька режимів енергозбереження. В одному такому режимі енергозбереження усі функції у віддаленому пристрої 101 зупинені, щоб "зменшити споживану потужність віддаленого пристрою 101 до мінімуму. З регулярними інтервалами віддалений пристрій 101 переходить в робочий режим, щоб перевірити, чи не змінилося що-небудь (тобто, чи були якінебудь запити, направлені на дії, які повинні бути здійснені віддаленим пристроєм 101). Одним з прикладів запиту на дію, яка повинна бути здійснена, є запит для використання віддаленого пристрою 101, щоб одержати натиснуті клавіші на клавіатурі або номеронабирачі віддаленого пристрою 101. Якщо хтось замовив обслуговування віддаленого пристрою, то віддалений пристрій 101 буде переходити в робочий режим і відповідати на запит. Якщо ніякий запит не був направлений для віддаленого пристрою, то віддалений пристрій 101 повертається зворотно в очікуючий режим. Однак віддалений пристрій 101 переходить в робочий режим на часових інтервалах пошукового виклику, щоб приймати інформацію, відправлену по каналу голосового пошукового виклику голосовою базовою станцією 105. Якщо ніхто не намагається встановити виклик віддаленого пристрою 101, то віддалений пристрій 101 повертається в режим очікування. Відповідно до другого режиму енергозбереження, віддалений пристрій 101 зменшує кількість споживаної енергії за допомогою зупинки всіх операцій, але зберігає роботу локального генератора тактових імпульсів. За допомогою збереження роботи локального генератора тактових імпульсів локальний генератор тактових імпульсів залишається ближче синхронізованим з часом на голосовій базовій станції 105, з якою він був останній раз синхронізований. Цей режим названий «режим псевдоочікування». Режим псевдоочікування надає можливість віддаленому пристрою зберігати енергію, не втрачаючи переваги синхронізації генератора тактових імпульсів, яка повинна відбуватися, якщо генератор тактових імпульсів був відключений. Тобто генератор тактових імпульсів може бути повторно синхронізований в наступному часовому інтервалі пошукового виклику або, як показано на Фіг.3, за допомогою звернення до каналу голосового пошукового виклику голосової базової станції 105 на короткий період часу. Однак, така синхронізація не така точна, як могла б бути у генератора тактових імпульсів, якщо б генератор тактових імпульсів синхронізувався за 11 84002 допомогою недавно виконаного обчислення місцеположення позиції SPS, і генератор тактових імпульсів залишався б працюючим. Отже, в одному з варіантів здійснення способу та пристрою, що розкриваються в даний момент, тюнер у віддаленому пристрої 101 не потребує того, щоб бути настроєним на канал голосового пошукового виклику, що передається голосовою базовою станцією 105, якщо обчислення місцеположення позиції було виконане досить недавно. Визначення того, наскільки недавно це могло бути, залежить від стабільності локального генератора тактових імпульсів у віддаленому пристрої 101. Проте, буде зрозуміло, що для кожного віддаленого пристрою і зв'язаного локального генератора тактових імпульсів буде мати місце деякий діапазон, в межах якого генератор тактових імпульсів буде залиша 12 тися більш точним, ніж може бути досягнуто за допомогою синхронізації по сигналах, прийнятих з голосової базової станції 105. У розгляді вищенаведеного, були описані спосіб та пристрій для пошуку та захоплення супутників SPS з використанням віддаленого пристрою, який виконаний з можливістю прийому і відправки як голосової інформації, так і даних, в доповнення з можливістю прийому сигналів супутників SPS. Як зазначено вище, незважаючи на те, що розкрита суть винаходу допускає різні модифікації та альтернативні різновиди, були показані як приклад на кресленнях і потім детально описані окремі їх варіанти здійснення. Тому повинно бути зрозуміло, що винахід визначається тільки прикладеною формулою винаходу і не обмежений конкретними варіантами здійснення розкритої суті винаходу. 13 Комп’ютерна в ерстка Л. Купенко 84002 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for communication with sps sattelites of global position finding
Автори англійськоюBkhatia Ashot, Noifeld Artur J., Salaman Glenn, Jonson Pol K., Rakhman Ari, Ristich Borislav, Rokh Mark Charles
Назва патенту російськоюСпособ и устройство для связи со спутниками глобального местоопределения
Автори російськоюБхатиа Ашок, Нойфельд Артур Дж., Саламан Гленн, Джонсон Пол К., Рахмат Ари, Ристич Борислав, Рох Марк Чарльз
МПК / Мітки
МПК: H04B 7/204
Мітки: спосіб, пристрій, місцевизначення, супутниками, глобального, зв'язку
Код посилання
<a href="https://ua.patents.su/7-84002-sposib-ta-pristrijj-dlya-zvyazku-z-suputnikami-globalnogo-misceviznachennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для зв`язку з супутниками глобального місцевизначення</a>
Спосіб розподілу каналів зв`язку між супутниками сукупності, що створює низькоорбітальне сузір`я (варіанти)спосіб передачі каналу зв`язку від одного з супутників з низькоорбітального сузір`я до іншого та систем
Номер патенту: 42068
Опубліковано: 15.10.2001
Автори: Картер Стівен С., Амес Вільям, Відман Роберт А., Монті Пол А.
МПК: H04B 7/195
Мітки: одного, створює, іншого, передачі, низькоорбітального, систем, сукупності, каналів, супутниками, каналу, варіанти),спосіб, розподілу, зв'язку, супутників, сузір`я, спосіб, низькоорбітальне
Формула / Реферат:
1. Спосіб розподілу каналів зв'язку між супутниками сукупності, що створює низькоорбітальне сузір'я, кожен з яких у кожний момент часу знаходження у полі зору наземної станції і абонента має певний кут піднесення, який відрізняється тим, що включає забезпечення кожного з сукупності супутників приймачем для прийому повідомлень від наземної станції, передавачем для передачі повідомлень до абонентів, приймачем для прийому повідомлень від...
Спосіб м’якої передачі зв’язку у безпроводовій системі зв’язку
Номер патенту: 64012
Опубліковано: 16.02.2004
Автори: Гоугленд Грег М., Бендер Пол Е., Кармі Гаді, Кімбалл Роберт Г., Падовані Роберто, Гроб Метью С.
МПК: H04Q 7/38
Мітки: спосіб, безпроводовій, зв'язку, передачі, м'якої, системі
Формула / Реферат:
1. Спосіб м'якої передачі зв'язку, який включає:вимірювання в мобільній станції енергії сигналів передачі від множини трансиверів базових станцій,виявлення кожного трансивера базової станції, який не має зв'язку з цією мобільною станцією через інформаційний канал і виміряна потужність сигналу якого перевищує поріг,додання мобільною станцією до активної групи ідентифікаторів трансиверів базових станцій згідно з цим...
Спосіб і пристрій для регулювання потужності мультиканального реверсивного зв’язку кола зворотного зв’язку
Номер патенту: 78234
Опубліковано: 15.03.2007
Автор: Чен Тао
МПК: H04B 7/005
Мітки: зв'язку, реверсивного, потужності, кола, зворотного, пристрій, регулювання, спосіб, мультиканального
Формула / Реферат:
1. Приймач в системі безпровідного зв'язку, який містить основний канал зворотної лінії зв'язку і додатковий канал зворотної лінії зв'язку, причому згаданий приймач містить:модуль обчислення значення дельти, виконаний з можливістю генерування дельти порогового значення;модуль корекції і регулювання порогового значення, виконаний з можливістю прийому коефіцієнта стирання кадрів з основного каналу зворотної лінії...
Спосіб керування передачами даних з множини базових станцій на мобільну станцію у системі зв’язку, пристрій для його здійснення і система зв’язку
Номер патенту: 83189
Опубліковано: 25.06.2008
Автори: Гааль Петер, Тідманн Едвард Дж., мол., Голмієх Азіз
МПК: H04Q 7/38
Мітки: система, здійснення, даних, зв'язку, керування, спосіб, передачами, пристрій, станцію, мобільну, базових, множині, станцій, системі
Формула / Реферат:
1. Спосіб керування передачами з множини базових станцій на мобільну станцію у системі зв'язку, який полягає у тому, щопередають від вказаної мобільної станції дані покажчика якості каналу для першої базової станції з множини базових станцій по каналу покажчика якості каналу зворотної лінії зв'язку, закодовані кодом Уолша, призначеним першій базовій станції,проколюють передачу даних покажчика якості каналу першої базової станції...
Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку
Номер патенту: 71022
Опубліковано: 15.11.2004
Автор: Соліман Самір С.
МПК: H04B 1/707, H04Q 7/38
Мітки: пошуку, пристрій, зв'язку, системі, безпровідного, спосіб, пілот-сигналу
Формула / Реферат:
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає: -визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку, -визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.2. Спосіб за п....
Попередній патент: Спосіб та стенд для випробування ракетного двигуна з вільно вкладеним зарядом твердого палива та з соплом, розташованим під кутом до осі корпусу двигуна
Наступний патент: Кривошипні ножиці з двома ножовими парами для різання катаної штаби
Випадковий патент: Пристрій для очищування коренебульбоплодів