Спосіб і пристрій для регулювання потужності мультиканального реверсивного зв’язку кола зворотного зв’язку


Формула / Реферат
1. Приймач в системі безпровідного зв'язку, який містить основний канал зворотної лінії зв'язку і додатковий канал зворотної лінії зв'язку, причому згаданий приймач містить:
модуль обчислення значення дельти, виконаний з можливістю генерування дельти порогового значення;
модуль корекції і регулювання порогового значення, виконаний з можливістю прийому коефіцієнта стирання кадрів з основного каналу зворотної лінії зв'язку;
суматор, виконаний з можливістю вироблення встановлювального значення зовнішнього контуру за допомогою підсумовування базового порогового значення від модуля корекції і регулювання порогового значення і дельти порогового значення, отриманого від модуля обчислення значення дельти;
компаратор, виконаний з можливістю порівняння встановлювального значення зовнішнього контуру з рівнем прийнятого сигналу, причому вихідний сигнал компаратора використовується для підстроювання потужності передачі мобільного пристрою.
2. Приймач за п. 1, який відрізняється тим, що згаданий модуль корекції і регулювання порогового значення виконаний з можливістю прийому згаданого коефіцієнта стирання кадрів з виділеного каналу керування зворотної лінії зв'язку.
3. Приймач за п. 1, який відрізняється тим, що містить модуль генерації команд збільшення/зменшення потужності, який використовує згаданий вихідний сигнал компаратора для настройки потужності передачі мобільного пристрою.
4. Приймач за п. 1, який відрізняється тим, що дельта порогового значення по суті дорівнює опорному рівню пілот-сигналу каналу мінус опорний рівень пілот-сигналу основного каналу зворотної лінії зв'язку.
5. Приймач за п. 1, який відрізняється тим, що коли дельта порогового значення встановлена на нуль, відсутній прийом по додатковому каналу зворотної лінії зв'язку.
6. Приймач за п. 1, який відрізняється тим, що рівень прийнятого сигналу видається модулем вимірювання рівня прийнятого сигналу.
7. Приймач за п. 1, який відрізняється тим, що модуль корекції і регулювання збільшує базове порогове значення на величину «Δ збільшення», коли виникає стирання кадру.
8. Приймач за п. 1, який відрізняється тим, що модуль корекції і регулювання знижує базове порогове значення на величину «Δ зменшення», коли не виникає стирання кадру.
9. Приймач за п. 6, який відрізняється тим, що модуль вимірювання рівня прийнятого сигналу оцінює рівень сигналу в пілотному каналі зворотної лінії зв'язку.
10. Приймач за п. 1, який відрізняється тим, що модуль корекції і регулювання порогового значення запам'ятовує базове порогове значення.
11. Спосіб генерування цільового відношення сигналу до шуму і перешкод в приймачі, що включає в себе етапи, на яких
визначають стирання кадрів в основному каналі зворотної лінії зв'язку;
визначають коефіцієнт стирання кадрів;
підтримують і підстроюють базове порогове значення;
визначають дельту порогового значення;
додають дельту порогового значення до базового порогового значення для отримання встановлювального значення зовнішнього контуру.
12. Спосіб за п. 11, який відрізняється тим, що додатково включає в себе етап, на якому порівнюють рівень прийнятого сигналу з встановлювальним значенням зовнішнього контуру.
13. Спосіб за п. 12, який відрізняється тим, що додатково включає в себе етап, на якому передають команду збільшення потужності до мобільного пристрою, коли рівень прийнятого сигналу менше, ніж встановлювальне значення зовнішнього контуру.
14. Спосіб за п. 12, який відрізняється тим, що додатково включає в себе етап, на якому передають команду зменшення потужності до мобільного пристрою, коли рівень прийнятого сигналу більше, ніж встановлювальне значення зовнішнього контуру.
15. Спосіб за п. 11, який відрізняється тим, що дельта порогового значення по суті дорівнює опорному рівню пілот-сигналу каналу максимальної швидкості передачі мінус опорний рівень пілот-сигналу основного каналу зворотної лінії зв'язку.
16. Спосіб за п. 11, який відрізняється тим, що згаданий етап визначення включає в себе визначення стирання кадрів у виділеному каналі керування зворотної лінії зв'язку.
17. Спосіб за п. 11, який відрізняється тим, що додатково включає в себе етап визначення того, коли мобільний пристрій здійснює передачі по множині каналів.
18. Спосіб за п. 17, який відрізняється тим, що дельту порогового значення встановлюють на нуль, коли мобільний пристрій не здійснює передачі по множині каналів.
19. Спосіб за п. 12, який відрізняється тим, що рівень прийнятого сигналу визначають в пілотному каналі зворотної лінії зв'язку.
20. Спосіб за п. 11, який відрізняється тим, що етап корекції і регулювання порогового значення включає в себе етап збільшення базового порогового значення на величину «Δ збільшення», коли виявляють стирання кадру.
21. Спосіб за п. 11, який відрізняється тим, що етап корекції і регулювання порогового значення включає в себе етап зменшення базового порогового значення на величину «Δ зменшення», коли не виявляють стирання кадру.
Текст
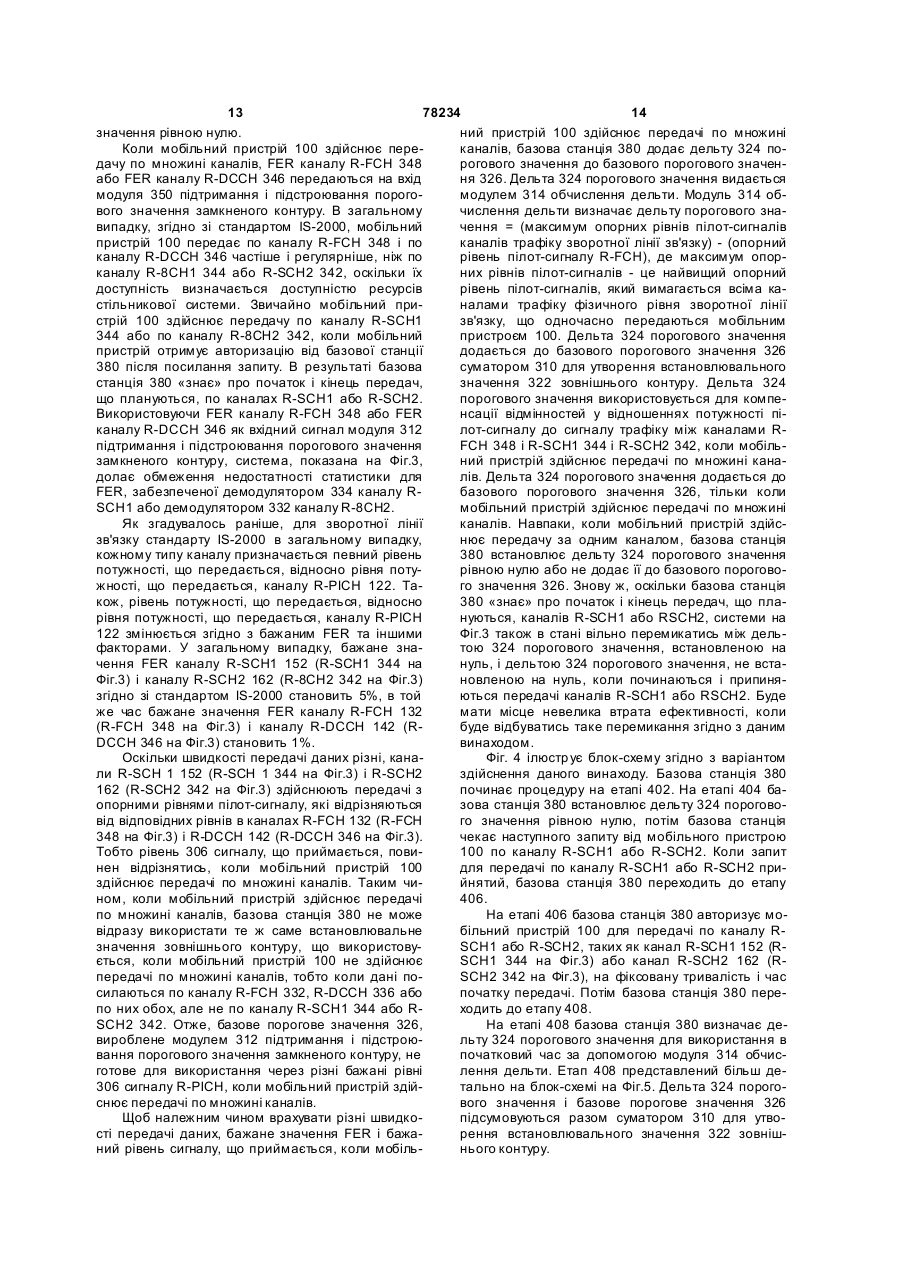
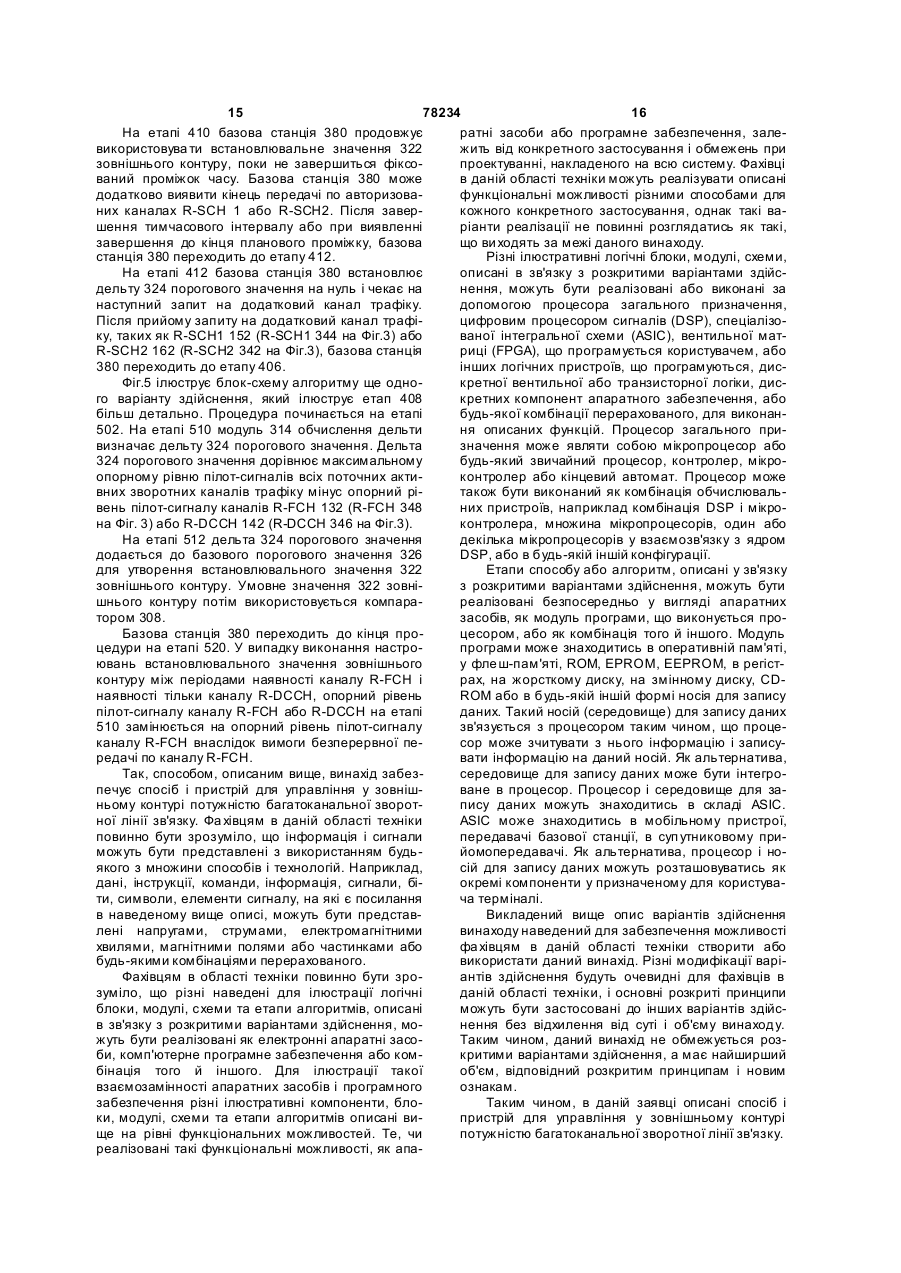
1. Приймач в системі безпровідного зв'язку, який містить основний канал зворотної лінії зв'язку і додатковий канал зворотної лінії зв'язку, причому згаданий приймач містить: модуль обчислення значення дельти, виконаний з можливістю генерування дельти порогового значення; модуль корекції і регулювання порогового значення, виконаний з можливістю прийому коефіцієнта стирання кадрів з основного каналу зворотної лінії зв'язку; суматор, виконаний з можливістю вироблення встановлювального значення зовнішнього контуру за допомогою підсумовування базового порогового значення від модуля корекції і регулювання порогового значення і дельти порогового значення, отриманого від модуля обчислення значення дельти; компаратор, виконаний з можливістю порівняння встановлювального значення зовнішнього контуру з рівнем прийнятого сигналу, причому вихідний сигнал компаратора використовується для підстроювання потужності передачі мобільного пристрою. 2. Приймач за п. 1, який відрізняється тим, що згаданий модуль корекції і регулювання порогового значення виконаний з можливістю прийому згаданого коефіцієнта стирання кадрів з виділеного каналу керування зворотної лінії зв'язку. 3. Приймач за п. 1, який відрізняється тим, що містить модуль генерації команд збільшення/зменшення потужності, який використовує згаданий вихідний сигнал компаратора для настройки потужності передачі мобільного пристрою. 2 (19) 1 3 78234 4 ніж встановлювальне значення зовнішнього контуколи мобільний пристрій здійснює передачі по ру. множині каналів. 14. Спосіб за п. 12, який відрізняється тим, що 18. Спосіб за п. 17, який відрізняється тим, що додатково включає в себе етап, на якому передадельту порогового значення встановлюють на ють команду зменшення потужності до мобільного нуль, коли мобільний пристрій не здійснює перепристрою, коли рівень прийнятого сигналу більше, дачі по множині каналів. ніж встановлювальне значення зовнішнього конту19. Спосіб за п. 12, який відрізняється тим, що ру. рівень прийнятого сигналу визначають в пілотному 15. Спосіб за п. 11, який відрізняється тим, що каналі зворотної лінії зв'язку. дельта порогового значення по суті дорівнює опо20. Спосіб за п. 11, який відрізняється тим, що рному рівню пілот-сигналу каналу максимальної етап корекції і регулювання порогового значення швидкості передачі мінус опорний рівень пілотвключає в себе етап збільшення базового порогосигналу основного каналу зворотної лінії зв'язку. вого значення на величину «Δ збільшення», коли 16. Спосіб за п. 11, який відрізняється тим, що виявляють стирання кадру. згаданий етап визначення включає в себе визна21. Спосіб за п. 11, який відрізняється тим, що чення стирання кадрів у виділеному каналі керуетап корекції і регулювання порогового значення вання зворотної лінії зв'язку. включає в себе етап зменшення базового порого17. Спосіб за п. 11, який відрізняється тим, що вого значення на величину «Δ зменшення», коли додатково включає в себе етап визначення того, не виявляють стирання кадру. Даний винахід відноситься до систем безпровідного зв'язку, більш конкретно, до способу і пристрою управління у зовнішньому контурі потужністю багатоканальної зворотної лінії зв'язку для систем безпровідного зв'язку множинного доступу з кодовим розділенням каналів (МДКР). Системи МДКР забезпечують підвищену пропускну спроможність і надійність зв'язку. Пропускна спроможність стільникової системи важлива для провайдера послуг стільникового зв'язку, оскільки це напряму впливає на дохід компанії. В принципі, пропускна спроможність системи безпровідного зв'язку МДКР обмежена взаємними перешкодами. Отже, вигідно зменшувати величину взаємних перешкод в системі безпровідного зв'язку МДКР. Загалом, найбільша кількість взаємних перешкод генерується від інших мобільних пристроїв, таких як стільникові телефони, які працюють в межах стільникової комірки або в сусідніх комірках. У зворотній лінії зв'язку, тобто при передачі від мобільного пристрою на базову станцію, мобільний пристрій в системі зв'язку МДКР надсилає псевдо-шумові (ПШ) послідовності на базову станцію. Базова станція приймає цей сигнал, як і ПШпослідовності, що випромінюються іншими мобільними пристроями. ПШ-послідовності мають таку властивість, що кореляція між затриманими версіями однієї послідовності значно нижче, ніж між двома послідовностями, вирівняними у часі, таким чином затримана ПШ-послідовність є шумом для приймача, узгодженого у часі для прийому другої ПШ-послідовності з іншою затримкою. Таким чином, в системі МДКР множина мобільних пристроїв можуть здійснювати передачі на одній і тій же частоті на одну і ту ж базову станцію. Переданий від мобільного користувача системи МДКР сигнал робить свій внесок в перешкоди по відношенню до сигналів, переданих від всіх інших користувачів. Оскільки сигнал від кожного мобільного пристрою в типовому стільниковому середовищі МДКР створює перешкоди сигналам інших мобільних пристроїв, проблема взаємних перешкод отримала назву проблеми «ближнього-далекого». Для ілюстрації проблеми «ближнього-далекого» розглянемо випадок двох мобільних пристроїв, що здійснюють зв'язок з однією базовою станцією. Передбачимо, що перший мобільний пристрій знаходиться поблизу базової станції і має малі втрати на розповсюдження, а другий мобільний пристрій віддалений від базової станції і має великі втрати на розповсюдження. Також передбачимо, що обидва мобільних пристрої здійснюють передачу з однаковою потужністю. Оскільки обидва мобільних пристрої здійснюють передачу з однаковою потужністю, але мають різні величини втрат на розповсюдження, базова станція може приймати більш слабкий сигнал від другого мобільного пристрою, ніж сигнал від першого мобільного пристрою. У системі МДКР сигнал, що передається від кожного мобільного пристрою, додає перешкоди всім іншим мобільним пристроям. Можна бачити, що з точки зору базової станції перший мобільний пристрій стає джерелом відносно великих перешкод для другого мобільного пристрою, ніж другий мобільний пристрій для першого. Таким чином мобільний пристрій, що знаходиться близько до базової станції, заглушає сигнал від мобільного пристрою, віддаленого від базової станції. Для подолання проблеми «ближнього-далекого» в системах МДКР використовується управління потужністю для управління потужністю, що передається, кожного мобільного пристрою. В принципі, у системах безпровідного зв'язку МДКР використовуються три типи систем управління потужністю для зворотної лінії зв'язку: - система управління потужністю в незамкненому контурі, - система управління потужністю в замкненому контурі і - система управління потужністю у зовнішньому контурі. У подальшому описі як приклад використовується термінологія зі стандарту IS-2000. У системах управління потужністю в незамкненому контурі мобільний пристрій використовує оцінену прийняту потужність від базової станції для управління своєю потужністю, що передається. Звичай 5 78234 6 но, система управління потужністю в незамкненонює передачу або по R-FCH, або по зворотних му контурі сама по собі недостатня, тому що прявиділених каналах управління R-DCCH. Базова ма лінія зв'язку (тобто від базової станції до мобістанція відстежує коефіцієнт стирання кадрів FER льного пристрою) і зворотна лінія зв'язку (тобто від в каналах R-SCH або R-DCCH і регулює встановмобільного пристрою до станції) використовують лювальне значення зовнішнього контур у на основі різні смуги частот. цього коефіцієнта FER. Коли мобільний пристрій Тому характеристики затінення і завмирання здійснює передачу на більш високих швидкостях для прямої і зворотної лінії зв'язку можуть відрізпередачі даних, він використовує для передачі нятися. Таким чином, безпровідні системи зв'язку зворотний додатковий канал R-SCH в доповнення МДКР також використовують (а) управління потудо основного зворотного каналу R-FCH, зворотножністю в замкненому контурі для регулювання пого виділеного каналу управління R-DCCH або тужності, що передається, мобільного пристрою, обох. так, що його відношення прийнятого сигналу до Як згадувалось вище, R-SCH в основному шуму і перешкод на базовій станції максимально працює з іншими рівнями відношення прийнятого наближається до бажаного рівня, і (б) управління сигналу до шуму і перешкод, ніж R-FCH або Rпотужністю у зовнішньому контурі, яке передбачає DCCH. Це, в свою чергу, впливає на оптимальний визначення того, яким повинне бути це відношендля базової станції рівень відношення прийнятого ня. сигналу до шуму і перешкод для Зворотного ПілоПо ідеї, управління потужністю в замкненому тного Каналу R-РІСН. Базова станція використовує контурі намагається відрегулювати потужність, що інше встановлювальне значення зовнішнього конпередається, мобільного пристрою, так, щоб сигтуру для відношення прийнятого по R-PICH сигнанал, що передається їм, прийнятий на базовій сталу до шум у і перешкод, коли мобільний пристрій нції, був максимально близький до порогового здійснює передачу по каналу R-SCH. Щоб підстрозначення. На базовій станції при управлінні потужїти встановлювальне значення зовнішнього контуністю в замкненому контурі передається команда ру, коли використовується R-SCH, базова станція «збільшити/зменшити» до мобільного пристрою, може використати спосіб відстеження FER або якщо визначено, що мобільному пристрою необінших метрик декодера каналу R-SCH і викорисхідно збільшити або зменшити свою потужність, тання їх у зовнішньому контурі для підстроювання що передається. При управлінні потужністю в завстановлювального значення зовнішнього контуру. мкненому контурі використовується вихідний сигОднак є декілька проблем при відстеженні нал зовнішнього контуру управління потужністю, FER каналу R-SCH для підстроювання встановлютобто бажане відношення сигналу до шуму і певального значення зовнішнього контуру. Одна решкод, назване встановлювальним значенням, як проблема полягає в тому, що мобільному приграниця для визначення, чи є прийнятий від мобістрою дозволено здійснити передачу по каналу Rльного пристрою на базовій станції сигнал дуже SCH тільки протягом обмеженого часу. Цей обмесильним або дуже слабким. жений період не забезпечує достатнього часу споУправління потужністю у зовнішньому контурі стереження для генерації достатньої статистики реалізується на базовій станції таким чином, щоб коефіцієнта FER, яка необхідна для точної назаданий коефіцієнт стирання кадрів (FER) або інстройки встановлювального значення зовнішнього ший показник якості досягався при мінімальній контуру. Інша проблема в тому, що передача по потужності, що передається, для каналу, відносно каналу R-SCH може бути несподівано перервана якого здійснюється управління. Якщо якість лінії мобільним пристроєм. Наприклад, мобільний призв'язку дуже низька або дуже висока, базова станстрій може не мати відповідної величини радіочасція регулює встановлювальне значення зовніштотної потужності або даних для передачі по кананього контуру для його підвищення або зниження, лу R-SCH. Внаслідок цього непередбаченого щоб досягнути бажану якість лінії зв'язку. У регуприпинення передачі по каналу R-SCH в базовій люванні встановлювального значення зовнішнього станції стає ускладненим отримання оцінки FER. контуру полягає управління потужністю у зовнішНавіть коли припинення передачі по каналу R-SCH ньому контурі. відбувається відповідно до заздалегідь встановСтандарти систем безпровідного зв'язку леного розкладу, управління потужністю у зовнішМДКР, такі як IS-2000, пропонують більш високі ньому контурі повинно здійснювати переходи між швидкості передачі даних в порівнянні зі швидкоканалами R-SCH і R-FCH або R-DCCH. Якщо зовстями, передбаченими в більш старих стандартах нішній контур на R-SCH або R-DCCH не був оновМДКР. У зворотній лінії зв'язку стандарту IS-2000 лений, такі переходи можуть створити період мобільний пристрій може здійснювати передачу на встановлення, де в інших умовах надмірно висока більш високих швидкостях передачі даних, викопотужність, що передається, була би потрібна для ристовуючи один або більш зворотних додаткових підтримання якості лінії зв'язку по каналах R-SCH каналів (R-SCH) в доповнення до основного звоабо R-DCCH. Подібні втрати ефективності виниротного каналу (R-FCH), який звичайно використокають на переході зовнішнього контуру до декодевується для менших швидкостей передачі даних. ру(ів) каналу(ів) R-SCH. Зворотні додаткові канали R-SCH працюють на У паралель зі встановлювальним значенням рівнях відношення прийнятого сигналу до шуму і зовнішнього контуру для каналу R-SCH подібні перешкод, які відрізняються від тих, які є в основпроблеми можуть існувати для каналу R-DCCH ному зворотному каналі R-FCH. внаслідок пачкового характеру його передачі. Це На більш низьких швидкостях передачі даних, означає, що встановлювальне значення зовнішв загальному випадку, мобільний пристрій здійснього контуру може не встановитись на коректно 7 78234 8 му рівні, якщо в даному каналі не відбуваються налу більше, ніж встановлювальне значення зовпередачі, що часто повторюються. Коли в зворотнішнього контуру, в іншому випадку він передає ній лінії зв'язку мобільного пристрою використовукоманду збільшення. ється тільки канал R-DCCH в доповнення до канаКороткий опис креслень. лу R-PICH, є необхідність збільшити відношення Фіг. 1 - канали фізичного рівня лінії зворотного пілотного сигналу, що приймається, до шуму і пезв'язку. решкод з урахуванням того факту, що встановлюФіг.2 - підстроювання на встановлювальне вальне значення зовнішнього контуру не треба значення зовнішнього контуру у часі. змінювати часто. Оскільки стандарт IS-2000 виФіг.3 - зразкова базова станція із засобами значає фіксоване відношення трафіку, що передауправління потужністю у ється, до пілотного сигналу для каналів R-FCH і R7 зовнішньому контурі. DCCH незалежно від їх вірогідних робочих циклів Фіг.4 - блок-схема, що ілюструє управління попередач, необхідно підстроїти пілотне еталонне тужністю у зовнішньому контурі. відношення тільки для R-DCCH. Фіг.5 - блок-схема, що ілюструє управління поНезважаючи на використання нових методів тужністю у зовнішньому контурі з використанням управління потужністю у зовнішньому контурі, коли відмінності пілотного еталонного рівня для зміни мобільний пристрій здійснює передачу з викорисефективного встановлювального значення зовнітанням множини каналів, мобільний пристрій може шнього контуру, коли є множина каналів. передавати більше потужності, ніж потрібно для Розкриті варіанти здійснення відносяться до необхідної надійності зв'язку. Це, в свою чергу способу і апаратури для управління потужністю може зменшити строк служби батареї живлення в багатоканальної зворотної лінії зв'язку у зовнішмобільному пристрої і знизити пропускну спромоньому контурі. Подальший опис містить докладну жність зворотної лінії зв'язку стільникової системи. інформацію, що стосується реалізації даного виОтже, є необхідність в управлінні потужністю у находу. Фа хівцям в даній області техніки повинно зовнішньому контурі, коли мобільний пристрій бути зрозуміло, що даний винахід може бути реаздійснює передачу з використанням множини калізований інакше, ніж конкретно описано в даній налів. Також бажано, щоб вирішення задачі заявці. Більш того деякі специфічні деталі винахоуправління потужністю у зовнішньому контурі було ду не описуються, щоб не затіняти суть винаходу. нескладним, особливо в умовах ви ходу на ринок. Такі деталі, не описані в даній заявці, відомі фахіПросте вирішення зменшить необхідні настройки, вцям в даній області техніки. знизить імовірність помилок при реалізації і підвиКреслення в даній заявці і опис, що відноситьщить надійність системи в несподіваних робочих ся до них, являють собою тільки зразкові варіанти умовах. До того ж, рішення, яке може бути реаліздійснення винаходу. Скорочено, інші варіанти зоване з мінімальними змінами в апаратному і здійснення винаходу, що використовують принципрограмному забезпеченні, зменшить час на розпи даного винаходу, конкретно не описані в даній робку, що в свою чергу зменшить витрати на проезаявці і показані на кресленнях. Слово «зразкові» ктування. використовується тут виключно в значенні «слуВаріанти здійснення, описані нижче, відповіжать як приклад, варіант або ілюстрація». Будьдають вищезгаданим потребам за рахунок забезякий варіант здійснення, описаний тут як «зразкопечення цільових відношень сигналу до шуму і вий» не обов'язково потрібно тлумачити як переперешкод для мобільного пристрою, що здійснює важний або такий, що має переваги над іншими передачі по множині каналів в зворотній лінії зв'язваріантами здійснення. ку в системі безпровідного зв'язку МДКР. Фіг.1 ілюструє канали фізичного рівня зворотРозкриті варіанти здійснення відносяться до ної лінії зв'язку, які можуть передаватись мобільспособу і пристрою для управління потужністю у ним пристроєм 100 при здійсненні зв'язку з базозовнішньому контурі, коли мобільний пристрій вою станцією 180 в стільниковій системі стандарту здійснює передачі з використанням множини каIS-2000. Хоча тільки частина типового мобільного налів. Відповідно до одного аспекту даного винапристрою показана в мобільному пристрої 100, він ходу, модуль підтримання і регулювання пороговобуде називатись в даній заявці мобільним приго значення приймає вхідні дані від декодера строєм 100. першого каналу і видає коректне базове встановФізичний рівень - це частина комунікаційних лювальне значення по зворотному пілотному капротоколів, відповідальна за передачу і прийом. налу, який активує управління потужністю в одноФізичний рівень містить в собі декілька каналів. У канальному режимі роботи. Далі, модуль мобільному пристрої 100 показана тільки підмнообчислення дельти виробляє дельту порогового жина каналів фізичного рівня зворотної лінії зв'яззначення, яка потім додається до базового пороку. Мобільний пристрій 100 може передавати дані гового значення. Результуюча сума являє собою на вхід 130 каналу R-FCH, на вхід 140 каналу Rвстановлювальне значення зовнішнього контуру, DCCH, на вхід 150 каналу R-SCH1 або на вхід 160 яке використовується вкомпараторі в багатоканаканалу R-SCH2. Мобільний пристрій 100 в загальльному режимі роботи в зворотній лінії зв'язку. ному випадку здійснює передачу з використанням Компаратор порівнює рівень прийнятого сигналу з каналів R-FCH 132, R-DCCH 142 або їх обох. Коли встановленим значенням зовнішнього контуру. мобільному пристрою треба передавати дані на Вихідний сигнал компаратора вводиться в модуль високих швидкостях, він може здійснювати перегенерації команд збільшення/зменшення. Модуль дачу по додатковому каналу, такому як R-SCH1 генерації команд збільшення/зменшення передає 152 і/або R-SCH2 162, в доповнення до R-FCH 132 команду зменшення, якщо рівень прийнятого сигабо R-DCCH 142, що використовуються. Канали R 9 78234 10 FCH 132, R-DCCH 142, R-SCH1 152 і R-SCH2 162 контурі. В одному варіанті здійснення зворотний фізичного рівня називаються каналами трафіку зв'язок до мобільного пристрою являє собою позворотної лінії зв'язку. слідовність команд збільшення і зменшення потуМобільний пристрій 100 використовує зворотжності. ний пілотний канал R-PICH 122 для забезпечення Якщо потужність, що приймається від мобільопорної фази і оцінки якості сигналу для когерентного пристрою 100, дуже висока, то базова станція ної демодуляції і об'єднання багатопроменевих 180 видає мобільному пристрою 100 команду змескладових сигналу в базовій станції 180. Сигнал ншення потужності. Навпаки, якщо потужність, що каналу R-PICH 122 являє собою немодульований приймається від мобільного пристрою 100, дуже сигнал, який не несе даних. Сигнал каналу R-PICH низька, то базова станція 180 видає мобільному 122 також забезпечує базовій станції 180 засіб для пристрою 100 команду збільшення потужності. вимірювання рівня прийнятого сигналу. ВимірюКоманди збільшення і зменшення потужності звивання рівня прийнятого сигналу може бути викоричайно змінюються з позитивними і негативними стане для управління потужністю по зворотній лінії приростами 1dB, але можуть використовуватись й зв'язку. інші величини. Базова станція 180 визначає, чи Кожний фізичний канал має своє власне посипотрібно видати команду збільшення або зменлення відносно R-PICH, що застосовується до ньошення потужності, за допомогою вимірювання відго до передачі, як показано підсилювачами 124, ношення прийнятого сигналу до шуму і перешкод і 134, 144, 154, і 164. Під час роботи мобільний припорівняння його з встановлювальним значенням стрій 100 повинен підтримувати рівень потужності зовнішнього контуру. Можуть також використовукожного каналу, використовуючи відповідні коефіватись відгуки зворотного зв'язку в інших формах. цієнти посилення для підсилювачів 124, 134, 144, В одному зразковому варіанті здійснення відгук 154 і 164. У загальному випадку, рівні потужності зворотного зв'язку забезпечує дійсне значення для каналів трафіку і каналів управління підтрикорекції для мобільної станції 100 для зміни її вимуються постійними відносно посилення пілотного хідної потужності. Тобто відгук зворотного зв'язку каналу 122 зворотної лінії зв'язку. Ці відношення містить як знак, так і величину. Як згадувалось також називаються відношеннями сигналу трафіку раніше, управління потужністю у зовнішньому кондо пілот-сигналу. турі безперервно підтримує і підстроює встановКоли в певний момент часу підтримується лювальне значення зовнішнього контуру для досяодин канал зворотної лінії зв'язку, необхідне відгнення кінцевої FER або інших бажаних ношення рівня прийнятого пілотного сигналу до характеристик якості каналу. шуму і перешкод залежить від швидкості передачі Приклад того, як здійснюються настройки у зоданих, довжини кадру, кодування з прямим виправнішньому контурі у часі, показаний на Фіг.2. Гравленням помилок (FEC), бажаної якості лінії зв'язфік на Фіг.2 показує підстроювання встановлюваку, рознесення антен в мобільному пристрої і в льного значення зовнішнього контуру у часі. В базовій станції, а також інших факторів. В резульмомент часу 202 базовою станцією 180 фіксується таті в стандарті IS-2000 вибране одне значення стирання кадру. Це стирання приводить до зросдля відношення прийнятого R-PICH -сигналу до тання коефіцієнта стирання кадрів FER. Якщо FER шуму і перешкод, яке відповідало узагальненій дуже великий до моменту часу 202, то управління ситуації, як робоча точка для кожної комбінації потужністю у зовнішньому контурі збільшує всташвидкості передачі даних, довжина кадру, FEC і новлювальне значення на величину «Δ збільшенцільовий FER. Ці прийняті рівні пілот-сигналу, виня» 204. У загальному випадку «Δ збільшення» ражені відносно необхідного при швидкості пере204 більше, ніж величина «Δ зменшення» 206, так дачі даних 9600б/сек., тривалості кадру 20-мсек., що базова станція 180 може швидко збільшити згортковому кодуванні R-FCH/ROCCH, що працювстановлювальне значення зовнішнього контуру, у ють при 1% FER, називаються опорними рівнями випадку, коли збільшується FER. У час з 202 по пілот-сигналу (PRL). Відношення сигналу трафіку 208 базова станція 180 не виявляє стирань і подо пілот-сигналу для цих комбінацій також визнаступово знижує встановлювальне значення зовнічені у стандарті IS-2000. У загальному випадку шнього контуру на величину « Δ зменшення» 206. передавач 180 базової станції настроює опорні Приблизний діапазон настройок для встановлюрівні пілот-сигналу кожного каналу трафіку і вального значення зовнішнього контуру може бути управління на певний рівень для підтримання конвід 4,0дБ до 4,5дБ, як показано на Фіг.2. В іншому кретного значення FER. прикладі модуль підтримання і підстроювання поВихідні сигнали підсилювачів 124, 134, 144, рогового значення змінює базове порогове зна154, і 164 потім підсумовуються суматором 168 і чення, тобто встановлювальне значення згідно з передаються антеною 170 мобільного пристрою. результатом декодування каналу R-FCH, каналу Переданий сигнал мобільного пристрою 100 приR-DCCH або їх обох. Якщо декодування успішне і ймається антеною 174 базової станції і обробляметрики декодера показують дуже високий рівень ється прийомопередавачем 180 базової станції. надійності, порогове значення зменшується. Якщо Системи безпровідного зв'язку МДКР, такі як декодування неуспішне і метрики декодера покавідповідні стандарту IS-2000, управляють потужнізують низький рівень надійності, порогове значенстю, що передається, мобільного пристрою 100. ня збільшується. Вимірюючи рівень прийнятого від мобільного приУзагальнюючи приклад, поданий на Фіг.2, строю 100 сигналу і забезпечуючи зворотний зв'яуправління потужністю у зовнішньому контурі можзок для мобільного пристрою 100, базова станція на основувати на FER каналу R-FCH 132. Коли 180 здійснює управління потужністю в замкненому мобільний пристрій 100 здійснює передачі з вико 11 78234 12 ристанням каналу R-FCH 132 або каналу R-DCCH рівня зворотної лінії зв'язку, такого як R-FCH 348, 142 і також здійснює передачі з використанням R-DCCH 346, R-SCH1 344 або R-SCH2 342. FER та каналу R-SCH, мобільний пристрій 100 можна розінші метрики декодера R-FCH 348 виробляються глядати як такий, що здійснює передачі по множині демодулятором-декодером 338 каналу R-FCH. каналів. Аналогічним чином FER та інші метрики декодера Зазначимо, що подальше пояснення викорисканалів-DCCH 346, R-SCH 1 344 і R-SCH2 342 витовує наявність R-SCH разом з R-FCH або Rробляються демодуляторами-декодерами 336, DCCH для ілюстрації даного винаходу. Інші варіа334, і 332, відповідно. Демодулятор-декодери 332, нти застосування, що включають необхідність під334, 336, 338 отримують вхідний сигнал з виходу строювання встановлювального значення зовнішдуплексора 302, а також від модуля 303 відновнього контуру, можуть бути виведені з даного лення і фільтрації пілотного каналу. прикладу. Коли мобільний пристрій 100 передає по Управління потужністю в замкненому контурі множині каналів, базова станція може використати намагається настроїти потужність, що передаєтьFER каналу R-SCH для підтримання і підстроюся, мобільного пристрою 100 так, щоб рівень сигвання встановлювального значення зовнішнього налу, що приймається, був близький до встановконтуру. Однак цей спосіб має проблеми, згадані лювального значення 322 зовнішнього контур у. В вище. Один варіант здійснення використовує FER одному варіанті здійснення управління потужністю або іншу метрику якості каналу R-FCH або Rв замкненому контурі регулює потужність, що пеDCCH для підтримання і підстроювання встановредається, мобільним пристроєм 100 за допомолювального значення зовнішнього контуру, коли гою команд збільшення/зменшення потужності. мобільний пристрій 100 здійснює передачі по мноБазова станція 380 надсилає мобільному прижині каналів. строю 100 команду збільшення потужності, якщо На Фіг.3 показана зразкова система 380, що рівень 306 прийнятого сигналу менше або дорівдеталізує частини базової станції 180 для управнює встановлювальному значенню 322 зовнішньоління потужністю в замкненому контурі і у зовнішго контуру, що визначається компаратором 308. В ньому контурі. Хоча система 380 ілюструє тільки іншому випадку базова станція 380 надсилає мочастину дійсної базової станції, в даній заявці вона більному пристрою 100 команду зменшення потузгадується як базова станція 380. Для спрощення жності, якщо рівень 306 прийнятого сигналу бількреслення багато які інші функції,включаючи розше встановлювального значення 322 зовнішнього несені приймальні антени, багатовідвідні приймачі контуру, що визначається компаратором 308. і їх з'єднання, не показані на Фіг.3. При управлінні в замкненому контурі потужнісЗразкова базова станція 380 приймає сигнал тю зворотної лінії зв'язку модуль 304 вимірювання зворотної лінії зв'язку від мобільного пристрою 100 рівня сигналу, що приймається, вимірює і видає за допомогою антени 374 базової станції. Дуплекрівень 306 прийнятого сигналу шляхом оцінки сор 302 пов'язаний з антеною 374 базової станції, Ес/(Іо + No), так що антена базової станції може бути викорисде Ес - енергія пілот-сигналу на кодове поситана для прийому і передачі сигналів. Вихідний лання, Іо - спектральна щільність потужності песигнал дуплексора 302 подається на вхід модуля решкод і No - спектральна щільність потужності 303 відновлення і фільтрації пілотного каналу, шуму. вихідний сигнал якого подається на вхід приймачів Управління потужністю у зовнішньому контурі 332, 334, 336, 338 індивідуальних каналів, а також підтримує і регулює базове порогове значення на модуль 304 вимірювання рівня сигналу, що 326, що використовується при управлінні потужнісприймається. Модуль 306 вимірювання рівня сигтю в замкненому контурі. Управління потужністю у налу, що приймається, підключений до входу комзовнішньому контурі настроює базовий поріг 326 паратора 308. для управління потужністю в замкненому контурі Компаратор 308 також приймає вхідний сигнал для підтримання цільового FER або інших харакз суматора 310. Суматор 310 додає базове поротеристик якості лінії зв'язку для каналу або канагове значення 326 з модуля 312 підтримання і підлів, які використовуються частіше інших. В цьому строювання порогового значення замкненого конприкладі це канали R-FCH або R-DCCH. В одному туру і дельти 324 порогового значення з модуля варіанті здійснення модуль 312 підтримання і під314 обчислення дельти. Вихідний сигнал суматора строювання порогового значення замкненого кон310 забезпечує встановлювальне значення 322 туру діє таким чином: якщо FER збільшується, зовнішнього контуру для компаратора 308. Вихідмодуль 312 підтримання і підстроювання порогоний сигнал компаратора 360 подається на вхід вого значення замкненого контуру збільшує базове модуля 316 генерації команд збільшенпорогове значення 326 на величину «Δ збільшення/зменшення потужності. Модуль 316 генерації ня» 204. В іншому випадку, якщо FER знижується, команд збільшення/зменшення видає команди 362 модуль 312 підтримання і підстроювання порогозбільшення/зменшення, які мультиплексуються з вого значення замкненого контуру знижує базовий даними 320 прямої лінії зв'язку за допомогою мупоріг 326 на величину «Δ зменшення» 206. льтиплексора 318. Вихідний сигнал мультиплексоЯкщо мобільний пристрій 100 здійснює перера 318 передається на вхід дуплексора 302 для дачу по каналу R-FCH, або R-DCCH, або по них передачі по прямій лінії зв'язку. обох, базове порогове значення 326 використовуВхід 350 модуля підтримання і підстроювання ється як встановлювальне значення зовнішнього порогового значення замкненого контуру може контуру безпосередньо для управління потужністю приймати FER або інші метрики декодера від одв замкненому контурі. Це здійснюється згідно з ного з каналів трафіку або управління фізичного Фіг.3 шляхом встановлення дельти 324 порогового 13 78234 14 значення рівною нулю. ний пристрій 100 здійснює передачі по множині Коли мобільний пристрій 100 здійснює переканалів, базова станція 380 додає дельту 324 подачу по множині каналів, FER каналу R-FCH 348 рогового значення до базового порогового значенабо FER каналу R-DCCH 346 передаються на вхід ня 326. Дельта 324 порогового значення видається модуля 350 підтримання і підстроювання порогомодулем 314 обчислення дельти. Модуль 314 обвого значення замкненого контуру. В загальному числення дельти визначає дельту порогового знавипадку, згідно зі стандартом IS-2000, мобільний чення = (максимум опорних рівнів пілот-сигналів пристрій 100 передає по каналу R-FCH 348 і по каналів трафіку зворотної лінії зв'язку) - (опорний каналу R-DCCH 346 частіше і регулярніше, ніж по рівень пілот-сигналу R-FCH), де максимум опорканалу R-8CH1 344 або R-SCH2 342, оскільки їх них рівнів пілот-сигналів - це найвищий опорний доступність визначається доступністю ресурсів рівень пілот-сигналів, який вимагається всіма кастільникової системи. Звичайно мобільний приналами трафіку фізичного рівня зворотної лінії стрій 100 здійснює передачу по каналу R-SCH1 зв'язку, що одночасно передаються мобільним 344 або по каналу R-8CH2 342, коли мобільний пристроєм 100. Дельта 324 порогового значення пристрій отримує авторизацію від базової станції додається до базового порогового значення 326 380 після посилання запиту. В результаті базова суматором 310 для утворення встановлювального станція 380 «знає» про початок і кінець передач, значення 322 зовнішнього контуру. Дельта 324 що плануються, по каналах R-SCH1 або R-SCH2. порогового значення використовується для компеВикористовуючи FER каналу R-FCH 348 або FER нсації відмінностей у відношеннях потужності піканалу R-DCCH 346 як вхідний сигнал модуля 312 лот-сигналу до сигналу трафіку між каналами Rпідтримання і підстроювання порогового значення FCH 348 і R-SCH1 344 і R-SCH2 342, коли мобільзамкненого контуру, система, показана на Фіг.3, ний пристрій здійснює передачі по множині канадолає обмеження недостатності статистики для лів. Дельта 324 порогового значення додається до FER, забезпеченої демодулятором 334 каналу Rбазового порогового значення 326, тільки коли SCH1 або демодулятором 332 каналу R-8CH2. мобільний пристрій здійснює передачі по множині Як згадувалось раніше, для зворотної лінії каналів. Навпаки, коли мобільний пристрій здійсзв'язку стандарту IS-2000 в загальному випадку, нює передачу за одним каналом, базова станція кожному типу каналу призначається певний рівень 380 встановлює дельту 324 порогового значення потужності, що передається, відносно рівня потурівною нулю або не додає її до базового пороговожності, що передається, каналу R-PICH 122. Таго значення 326. Знову ж, оскільки базова станція кож, рівень потужності, що передається, відносно 380 «знає» про початок і кінець передач, що пларівня потужності, що передається, каналу R-PICH нуються, каналів R-SCH1 або RSCH2, системи на 122 змінюється згідно з бажаним FER та іншими Фіг.3 також в стані вільно перемикатись між дельфакторами. У загальному випадку, бажане знатою 324 порогового значення, встановленою на чення FER каналу R-SCH1 152 (R-SCH1 344 на нуль, і дельтою 324 порогового значення, не встаФіг.3) і каналу R-SCH2 162 (R-8CH2 342 на Фіг.3) новленою на нуль, коли починаються і припинязгідно зі стандартом IS-2000 становить 5%, в той ються передачі каналів R-SCH1 або RSCH2. Буде же час бажане значення FER каналу R-FCH 132 мати місце невелика втрата ефективності, коли (R-FCH 348 на Фіг.3) і каналу R-DCCH 142 (Rбуде відбуватись таке перемикання згідно з даним DCCH 346 на Фіг.3) становить 1%. винаходом. Оскільки швидкості передачі даних різні, канаФіг. 4 ілюстр ує блок-схему згідно з варіантом ли R-SCH 1 152 (R-SCH 1 344 на Фіг.3) і R-SCH2 здійснення даного винаходу. Базова станція 380 162 (R-SCH2 342 на Фіг.3) здійснюють передачі з починає процедуру на етапі 402. На етапі 404 баопорними рівнями пілот-сигналу, які відрізняються зова станція 380 встановлює дельту 324 порогововід відповідних рівнів в каналах R-FCH 132 (R-FCH го значення рівною нулю, потім базова станція 348 на Фіг.3) і R-DCCH 142 (R-DCCH 346 на Фіг.3). чекає наступного запиту від мобільного пристрою Тобто рівень 306 сигналу, що приймається, пови100 по каналу R-SCH1 або R-SCH2. Коли запит нен відрізнятись, коли мобільний пристрій 100 для передачі по каналу R-SCH1 або R-SCH2 приздійснює передачі по множині каналів. Таким чийнятий, базова станція 380 переходить до етапу ном, коли мобільний пристрій здійснює передачі 406. по множині каналів, базова станція 380 не може На етапі 406 базова станція 380 авторизує мовідразу використати те ж саме встановлювальне більний пристрій 100 для передачі по каналу Rзначення зовнішнього контуру, що використовуSCH1 або R-SCH2, таких як канал R-SCH1 152 (Rється, коли мобільний пристрій 100 не здійснює SCH1 344 на Фіг.3) або канал R-SCH2 162 (Rпередачі по множині каналів, тобто коли дані поSCH2 342 на Фіг.3), на фіксовану тривалість і час силаються по каналу R-FCH 332, R-DCCH 336 або початку передачі. Потім базова станція 380 перепо них обох, але не по каналу R-SCH1 344 або Rходить до етапу 408. SCH2 342. Отже, базове порогове значення 326, На етапі 408 базова станція 380 визначає девироблене модулем 312 підтримання і підстроюльту 324 порогового значення для використання в вання порогового значення замкненого контуру, не початковий час за допомогою модуля 314 обчисготове для використання через різні бажані рівні лення дельти. Етап 408 представлений більш де306 сигналу R-PICH, коли мобільний пристрій здійтально на блок-схемі на Фіг.5. Дельта 324 порогоснює передачі по множині каналів. вого значення і базове порогове значення 326 Щоб належним чином врахувати різні швидкопідсумовуються разом суматором 310 для утвості передачі даних, бажане значення FER і бажарення встановлювального значення 322 зовнішний рівень сигналу, що приймається, коли мобільнього контуру. 15 78234 16 На етапі 410 базова станція 380 продовжує ратні засоби або програмне забезпечення, залевикористовува ти встановлювальне значення 322 жить від конкретного застосування і обмежень при зовнішнього контуру, поки не завершиться фіксопроектуванні, накладеного на всю систему. Фахівці ваний проміжок часу. Базова станція 380 може в даній області техніки можуть реалізувати описані додатково виявити кінець передачі по авторизовафункціональні можливості різними способами для них каналах R-SCH 1 або R-SCH2. Після заверкожного конкретного застосування, однак такі вашення тимчасового інтервалу або при виявленні ріанти реалізації не повинні розглядатись як такі, завершення до кінця планового проміжку, базова що ви ходять за межі даного винаходу. станція 380 переходить до етапу 412. Різні ілюстративні логічні блоки, модулі, схеми, На етапі 412 базова станція 380 встановлює описані в зв'язку з розкритими варіантами здійсдельту 324 порогового значення на нуль і чекає на нення, можуть бути реалізовані або виконані за наступний запит на додатковий канал трафіку. допомогою процесора загального призначення, Після прийому запиту на додатковий канал трафіцифровим процесором сигналів (DSP), спеціалізоку, таких як R-SCH1 152 (R-SCH1 344 на Фіг.3) або ваної інтегральної схеми (ASIC), вентильної матR-SCH2 162 (R-SCH2 342 на Фіг.3), базова станція риці (FPGA), що програмується користувачем, або 380 переходить до етапу 406. інших логічних пристроїв, що програмуються, дисФіг.5 ілюструє блок-схему алгоритму ще однокретної вентильної або транзисторної логіки, дисго варіанту здійснення, який ілюструє етап 408 кретних компонент апаратного забезпечення, або більш детально. Процедура починається на етапі будь-якої комбінації перерахованого, для виконан502. На етапі 510 модуль 314 обчислення дельти ня описаних функцій. Процесор загального привизначає дельту 324 порогового значення. Дельта значення може являти собою мікропроцесор або 324 порогового значення дорівнює максимальному будь-який звичайний процесор, контролер, мікроопорному рівню пілот-сигналів всіх поточних актиконтролер або кінцевий автомат. Процесор може вних зворотних каналів трафіку мінус опорний рітакож бути виконаний як комбінація обчислювальвень пілот-сигналу каналів R-FCH 132 (R-FCH 348 них пристроїв, наприклад комбінація DSP і мікрона Фіг. 3) або R-DCCH 142 (R-DCCH 346 на Фіг.3). контролера, множина мікропроцесорів, один або На етапі 512 дельта 324 порогового значення декілька мікропроцесорів у взаємозв'язку з ядром додається до базового порогового значення 326 DSP, або в будь-якій іншій конфігурації. для утворення встановлювального значення 322 Етапи способу або алгоритм, описані у зв'язку зовнішнього контуру. Умовне значення 322 зовніз розкритими варіантами здійснення, можуть бути шнього контуру потім використовується компарареалізовані безпосередньо у вигляді апаратних тором 308. засобів, як модуль програми, що виконується проБазова станція 380 переходить до кінця процесором, або як комбінація того й іншого. Модуль цедури на етапі 520. У випадку виконання настропрограми може знаходитись в оперативній пам'яті, ювань встановлювального значення зовнішнього у фле ш-пам'яті, ROM, EPROM, EEPROM, в регістконтуру між періодами наявності каналу R-FCH і рах, на жорсткому диску, на змінному диску, CDнаявності тільки каналу R-DCCH, опорний рівень ROM або в будь-якій іншій формі носія для запису пілот-сигналу каналу R-FCH або R-DCCH на етапі даних. Такий носій (середовище) для запису даних 510 замінюється на опорний рівень пілот-сигналу зв'язується з процесором таким чином, що процеканалу R-FCH внаслідок вимоги безперервної песор може зчитувати з нього інформацію і записуредачі по каналу R-FCH. вати інформацію на даний носій. Як альтернатива, Так, способом, описаним вище, винахід забезсередовище для запису даних може бути інтегропечує спосіб і пристрій для управління у зовнішване в процесор. Процесор і середовище для заньому контурі потужністю багатоканальної зворотпису даних можуть знаходитись в складі ASIC. ної лінії зв'язку. Фа хівцям в даній області техніки ASIC може знаходитись в мобільному пристрої, повинно бути зрозуміло, що інформація і сигнали передавачі базової станції, в суп утниковому приможуть бути представлені з використанням будьйомопередавачі. Як альтернатива, процесор і ноякого з множини способів і технологій. Наприклад, сій для запису даних можуть розташовуватись як дані, інструкції, команди, інформація, сигнали, біокремі компоненти у призначеному для користувати, символи, елементи сигналу, на які є посилання ча терміналі. в наведеному вище описі, можуть бути представВикладений вище опис варіантів здійснення лені напругами, струмами, електромагнітними винаходу наведений для забезпечення можливості хвилями, магнітними полями або частинками або фа хівцям в даній області техніки створити або будь-якими комбінаціями перерахованого. використати даний винахід. Різні модифікації варіФахівцям в області техніки повинно бути зроантів здійснення будуть очевидні для фахівців в зуміло, що різні наведені для ілюстрації логічні даній області техніки, і основні розкриті принципи блоки, модулі, схеми та етапи алгоритмів, описані можуть бути застосовані до інших варіантів здійсв зв'язку з розкритими варіантами здійснення, монення без відхилення від суті і об'єму винаходу. жуть бути реалізовані як електронні апаратні засоТаким чином, даний винахід не обмежується розби, комп'ютерне програмне забезпечення або комкритими варіантами здійснення, а має найширший бінація того й іншого. Для ілюстрації такої об'єм, відповідний розкритим принципам і новим взаємозамінності апаратних засобів і програмного ознакам. забезпечення різні ілюстративні компоненти, блоТаким чином, в даній заявці описані спосіб і ки, модулі, схеми та етапи алгоритмів описані випристрій для управління у зовнішньому контурі ще на рівні функціональних можливостей. Те, чи потужністю багатоканальної зворотної лінії зв'язку. реалізовані такі функціональні можливості, як апа 17 78234 18 19 Комп’ютерна в ерстка М. Мацело 78234 Підписне 20 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for controlling transmission power in a reverse channel of a communication system
Автори англійськоюChen Tao
Назва патенту російськоюСпособ и устройство для регулирования мощности передачи сигналов в обратном канале системы связи
Автори російськоюЧен Тао
МПК / Мітки
МПК: H04B 7/005
Мітки: зворотного, потужності, регулювання, спосіб, зв'язку, реверсивного, мультиканального, пристрій, кола
Код посилання
<a href="https://ua.patents.su/10-78234-sposib-i-pristrijj-dlya-regulyuvannya-potuzhnosti-multikanalnogo-reversivnogo-zvyazku-kola-zvorotnogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для регулювання потужності мультиканального реверсивного зв’язку кола зворотного зв’язку</a>
Спосіб регулювання потужності випромінювання передавача
Номер патенту: 9357
Опубліковано: 15.09.2005
Автори: Бережний Олег Миколайович, Гостєв Володимир Іванович
МПК: H04B 7/005
Мітки: потужності, передавача, випромінювання, спосіб, регулювання
Формула / Реферат:
Спосіб регулювання потужності випромінювання передавача, при якому визначають на приймальному кінці радіолінії коефіцієнт передачі прямого каналу, порівнюють коефіцієнт передачі прямого каналу з опорним значенням, формують сигнал помилки, передають сигнал помилки по каналу зворотного зв'язку на передавальний кінець радіолінії, формують сигнал управління на об'єкт управління та встановлюють необхідну потужність випромінювання, який...
Спосіб регулювання потужності в системі зв’язку та пристрій для його здійснення (варіанти)
Номер патенту: 61946
Опубліковано: 15.12.2003
Автори: Тідеманн Едвард Г., мол., Сейнтс Кіт В.
МПК: H04B 7/005
Мітки: зв'язку, спосіб, варіанти, пристрій, регулювання, здійснення, потужності, системі
Формула / Реферат:
1. Спосіб регулювання потужності передачі у прямому каналі у системі ПДКУ, який передбачає вимірювання амплітуд першої групи бітів, порівняння зазначених амплітуд з бажаним рівнем енергії і формування другої групи бітів на підставі результату зазначеного порівняння, причому зазначена потужність передачі коригується згідно з зазначеною другою групою бітів.2. Спосіб за п. 1, який відрізняється тим, що зазначений бажаний рівень енергії...
Спосіб і пристрій для регулювання потужності у прямому інформаційному каналі і система зв’язку, де вони використовуються
Номер патенту: 54543
Опубліковано: 17.03.2003
Автори: Тідеманн Едвард Г., мол.
МПК: H04Q 7/38
Мітки: використовуються, регулювання, зв'язку, спосіб, каналі, система, потужності, прямому, пристрій, інформаційному
Формула / Реферат:
1. Спосіб корекції призначень потужності у прямому інформаційному каналі системи зв'язку, який включає операції:- вимірювання у мобільній станції якості відповідних якостей пілот-сигналів, переданих сукупністю базових станцій активної групи зазначеної мобільної станції,- порівняння зазначених якостей відповідних пілот-сигналів з стандартним значенням якості,- надсилання до контролера системи повідомлення, яке вказує, який...
Спосіб і пристрій визначення робочої сітки частот системи звязку із стрибкоподібною зміною частоти
Номер патенту: 63931
Опубліковано: 16.02.2004
Автор: Сорочан Анатолій Григорович
МПК: G01R 23/00
Мітки: зв'язку, спосіб, зміною, системі, стрибкоподібною, робочої, частот, визначення, частоти, сітки, пристрій
Формула / Реферат:
1.Спосіб визначення робочої сітки частот системи зв’язку із стрибкоподібною зміною частоти, який ґрунтується на тому, що вхідний сигнал із стрибкоподібно змінюваною робочою частотою Wс, яка знаходиться в діапазоні частот DW, розгалужують на три частини, в першій частині сигнал зміщують по частоті на частоту гетеродину Wг1 і затримують на сталу часу t01, одержаний сигнал перемножують з другою частиною сигналу, після чого на частоті Wг1...
Спосіб, пристрій та система для регулювання у режимі реального часу потужності на оптичному каналі у багатоканальній оптичній лінії зв’язку
Номер патенту: 76879
Опубліковано: 15.09.2006
Автори: Сіван Тсві, Халеві Ілан, Харріс Давід, Тубі Мордехай
МПК: H04J 14/02, H04B 10/08, H04B 10/17
Мітки: оптичному, регулювання, пристрій, оптичний, потужності, система, багатоканальний, зв'язку, часу, реального, каналі, спосіб, лінії, режимі
Формула / Реферат:
1. Спосіб регулювання у реальному режимі часу потужності оптичного каналу у багатоканальній оптичній лінії передачі, утвореній групою оптичних елементів, з'єднаних у ланцюг волоконними ділянками, де група елементів включає як мінімум один оптичний підсилювач (OFA), і де кожна з ділянок характеризується згасанням на ділянці, а кожен OFA характеризується своїм коефіцієнтом передачі та проектною вихідною потужністю на канал,спосіб включає...
Попередній патент: Спосіб одержання суміші стабільних нуклідів селену-74 та германію-74 з чистого миш’яку-75
Наступний патент: Фармацевтична композиція, що містить гамма-бутиробетаїн, для лікування імпотенції у ссавців чоловічої статі
Випадковий патент: Пристрій для орієнтування виробів