Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації
Номер патенту: 84176
Опубліковано: 25.09.2008
Автори: Конох Ігор Сергійович, Хребтова Оксана Анатоліївна, Гладир Андрій Іванович, Гомілко Володимир Іванович, Ємець Валерій Васильович, Романенко Катерина Георгіївна
Формула / Реферат
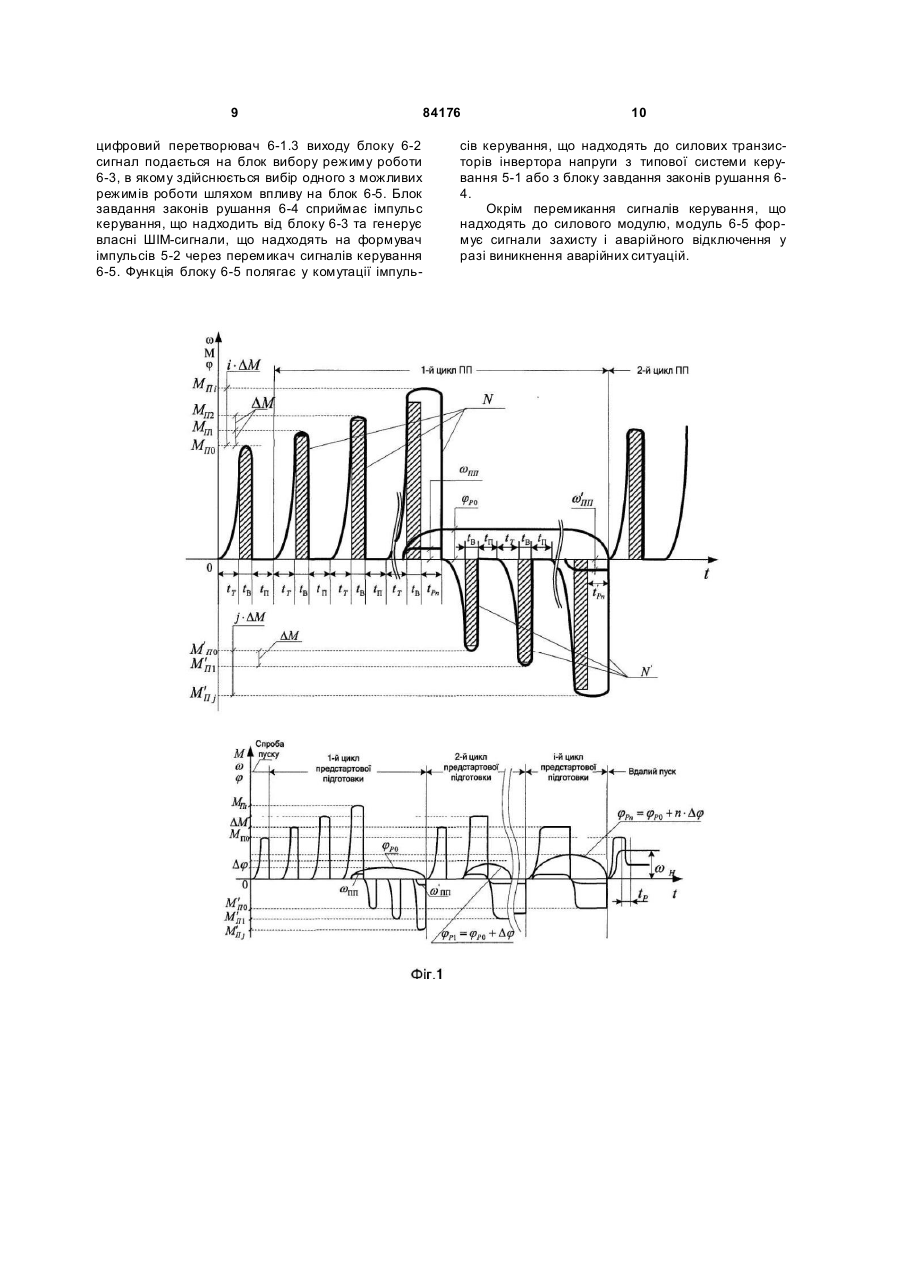
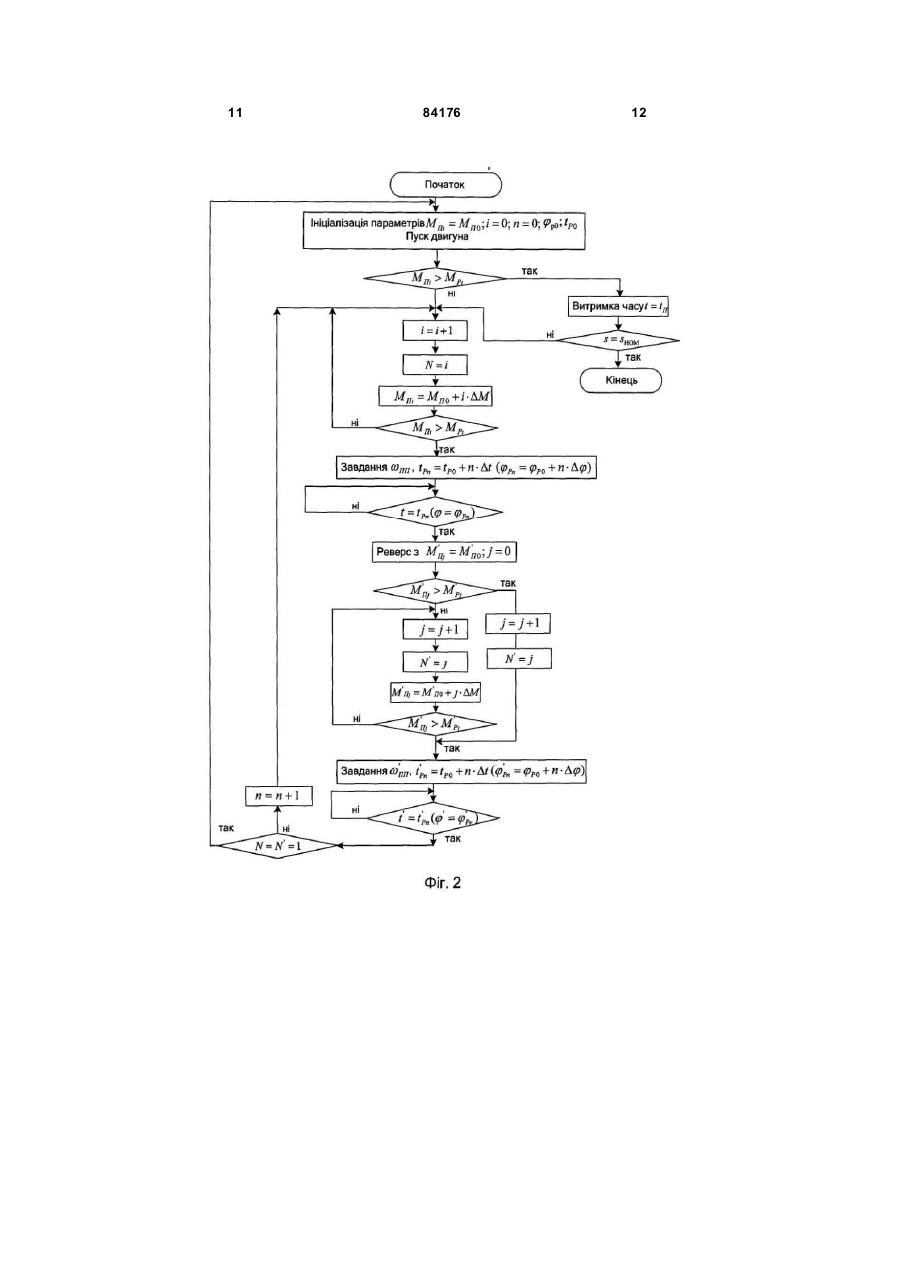
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шляхом обчислення ковзання s за миттєвими значеннями струму та напруги статора, заданні паузи на час t = tП при важкому пуску з s = 1 та моментом опору МР0 технологічного механізму, що перевищує пусковий момент двигуна МП0, здійсненні повторних пробних пусків з обчисленням та заданням інтервалів часу t = tT, збільшенням амплітуди імпульсного моменту М Пі при кожній і-й спробі на значення DM за виразом МПі = МП0+і.DM, перевіркою впродовж часу t=tВ умови рушання MПі > MРі, до досягнення s¹l, заданні часу та швидкості обертання ротора асинхронного двигуна, який відрізняється тим, що після досягнення двигуном заданих параметрів руху здійснюють зміну напрямку обертання двигуна, впродовж часу t = tT збільшують момент двигуна у зворотному напрямку до значення М'П0, контролюють процес запуску впродовж часу t = tB шляхом обчислення ковзання s, задають паузу на час t = tП при s = l та М'П0 < М'Р0, здійснюють повторні пробні пуски у зворотному напрямку з обчисленням та заданням інтервалів часу t = tT, збільшенням амплітуди імпульсного моменту M'Пj при кожній j-й спробі на значення DM за виразом М'Пj = М'П0+j.DM, перевіркою впродовж часу t = tB умови рушання M'Пj > M'Pj до досягнення значення ковзання s ¹ 1, заданням часу та швидкості обертання ротора асинхронного двигуна у зворотному напрямку до повернення ротора у початкове положення, перевіряють кількість прямих N та зворотних N' імпульсів моменту АД у першому циклі передстартової підготовки, здійснюють перехід до наступного циклу при N ¹ 1 та N' ¹ 1, повторюють цикли передстартової підготовки до досягнення руху у прямому та зворотному напрямах з N = N' = 1, поступове підвищення пускового моменту двигуна забезпечують шляхом збільшення відносного значення напруги живлення kU при фіксованому відносному значенні частоти (kf = const) » 0,1f1ном за законом kU = (kf)1/b, де kf = f1/f1ном - коефіцієнт, що враховує зниження частоти f1, основної гармоніки напруги живлення статора АД відносно номінальної частоти мережі f1ном; kU = U1/U1ном - фазна напруга статора U1, виражена в частках до номінальної фазної напруги мережі живлення U1ном, b - коефіцієнт, що змінюється в залежності від напрямку обертання та від номера спроби рушання, для прямого обертання b визначають залежністю bi = b0+g×i, де g - коефіцієнт, що визначає ступінь зростання моменту DM, g » (0,1¸0,3); b0 - коефіцієнт b під час першої спроби пуску i = 0, зокрема, при стандартному законі частотного керування kf = kU bi = b0 = 1, для зворотного напрямку обертання b визначається залежністю bj = b'0+g×j, де b'0 - коефіцієнт b під час першої спроби рушання у зворотному напрямку з j = 0.
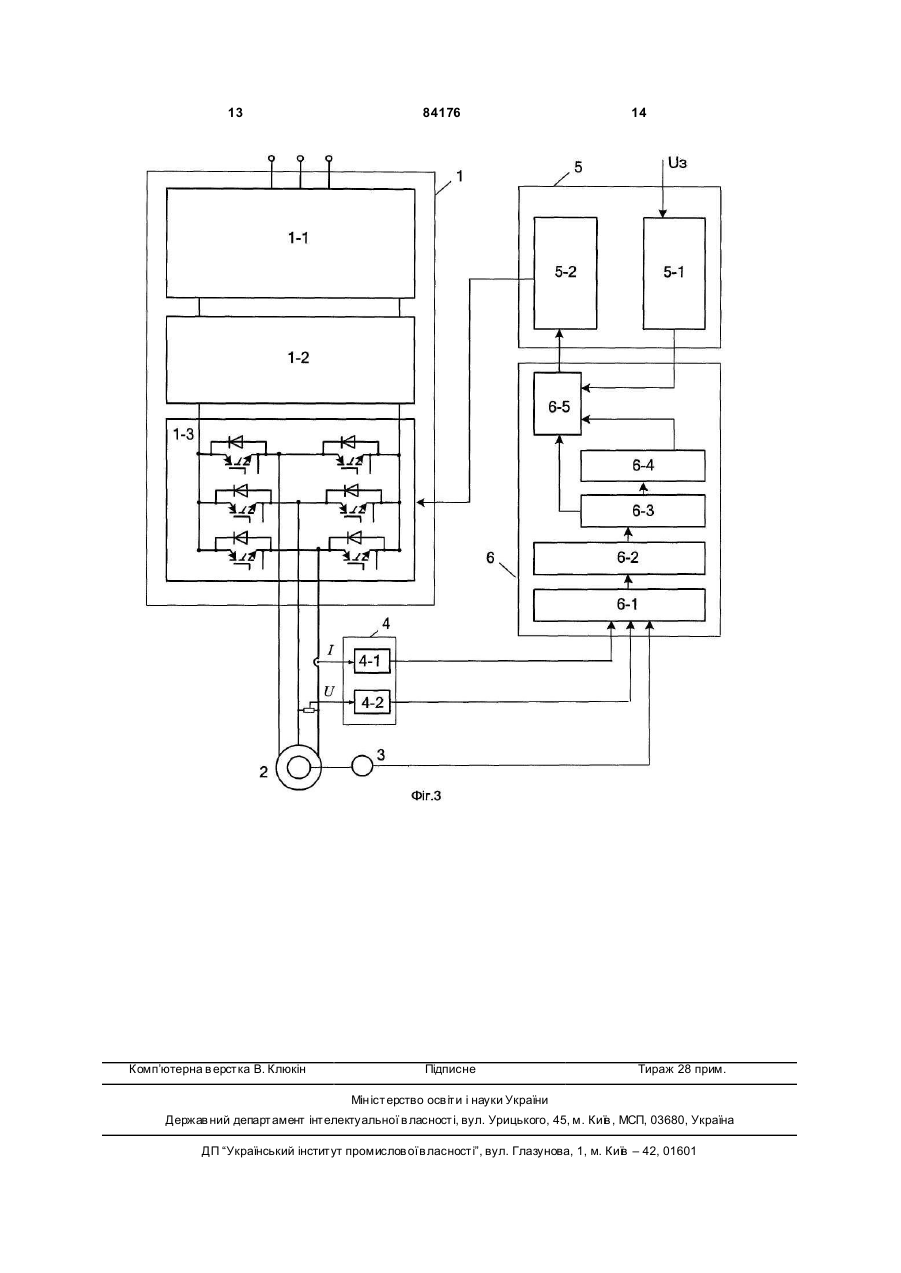
2. Пристрій керування асинхронним двигуном при важкому рушанні, що містить стандартний силовий модуль перетворювача частоти, до складу якого належать некерований випрямляч, входи якого підключені до мережі живлення, а виходи з'єднані з входами ємнісного фільтра, автономний інвертор напруги, відповідні входи якого підключені до ємнісного фільтра, а виходи з'єднані з трифазною обмоткою статора асинхронного двигуна, який відрізняється тим, що додатково обладнаний блоком датчиків струму і напруги, датчиком кута повороту та програмним пристроєм, виходи датчиків підключені до програмного пристрою, який містить аналого-цифровий перетворювач, входи якого з'єднано з відповідними виходами датчиків, блок визначення ковзання, вхід якого з'єднано з виходом аналого-цифрового перетворювача, блок вибору режиму роботи, вхід якого з'єднано з виходом блока визначення ковзання, а один з виходів з'єднаний з входом блока задання законів рушання, інший вихід блока вибору режиму та вихід блока задання законів рушання з'єднані з відповідними входами перемикача сигналів керування, а вихід останнього підключений до системи керування перетворювачем частоти, що містить генератор сигналів широтно-імпульсної модуляції, вхід якого призначений для вводу зовнішніх сигналів задання швидкості обертання, а вихід підключений до відповідного входу перемикача сигналів керування, та формувач імпульсів, вхід якого підключений до виходу перемикача сигналів керування, а його вихід підключений до силового модуля перетворювача частоти, зокрема до автономного інвертора напруги.
Текст
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шля хом обчислення ковзання s за миттєвими значеннями струму та напруги статора, заданні паузи на час t = tП при важкому пуску з s = 1 та моментом опору МР0 те хнологічного механізму, що перевищує пусковий момент двигуна МП 0, здійсненні повторних пробних пусків з обчисленням та заданням інтервалів часу t = tT, збільшенням амплітуди імпульсного моменту М Пі при кожній і-й спробі на значення DM за виразом МПі = МП0+і. DM, перевіркою впродовж часу t=tВ умови рушання MПі > MРі, до досягнення s¹l, заданні часу та швидкості обертання ротора асинхронного двигуна, який відрізняється тим, що після досягнення двигуном заданих параметрів руху здійснюють зміну напрямку обертання двигуна, впродовж часу t = tT збільшують момент двигуна у зворотному напрямку до значення М'П0, контролюють процес запуску впродовж часу t = tB шляхом обчислення ковзання s, задають паузу на час t = tП при s = l та М'П0 МРі, де МПі - значення пускового моменту двигуна, МРі – відповідне значення момент опору механізму на і - тій спробі рушання, і=0, 1,... . З цією метою впродовж часу t = tT перетворювач частоти поступово збільшує пусковий моменту АД до значення МПі = MП0 за одним зі стандартних законів частотного керування. Наприклад, у разі пропорційного збільшення частоти та напруги живлення до номінальних значень, пусковий момент зростає до значення МП.НОМ, що відповідає його паспортним параметрам: МП0=МП.НОМ. Впродовж часу t=tB визначається наявність обертання ротора АД за допомогою датчика кута повороту вала або датчика швидкості. В разі відсутності таких датчиків програмний пристрій ви 6 значає наявність руху через ковзання s, яке розраховується відомими способами за миттєвими значеннями струму та напруги у фазах статора. Якщо за час t=tB програмний пристрій визначає, що ковзання асинхронного двигуна sМРі, тобто, триває процес пуску. За визначений час t = tP двигун розганяється до заданої номінальної швидкості w=wн (або s=s H) та процес пуску на цьому завершується. Якщо за час t=tB програмний пристрій визначає, що ковзання асинхронного двигуна s=1, або частота обертання ротора w=0, це свідчить про те, що пусковий момент двигуна не перевищує значення моменту опору технологічного механізму, МПі
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for asynchronous motor control in case of heavy starting duty and apparatus for its realization
Автори англійськоюHladyr Andrii Ivanovych, Homilko Volodymyr Ivanovych, Konokh Ihor Serhiiovych, Romanenko Kateryna Heorhiivna, Khrebtova Oksana Anatoliivna
Назва патенту російськоюСпособ управления асинхронным двигателем при трудных условиях старта и устройство для его реализации
Автори російськоюГладыр Андрей Иванович, Гомилко Владимир Иванович, Конох Игорь Сергеевич, Романенко Екатерина Георгиевна, Хребтова Оксана Анатольевна
МПК / Мітки
МПК: H02P 1/00
Мітки: спосіб, пристрій, реалізації, керування, рушанні, важкому, двигуном, асинхронним
Код посилання
<a href="https://ua.patents.su/7-84176-sposib-keruvannya-asinkhronnim-dvigunom-pri-vazhkomu-rushanni-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації</a>
Спосіб керування асинхронним двигуном та пристрій для його реалізації
Номер патенту: 62097
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Сичов Сергій Дмитрович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: асинхронним, керування, двигуном, пристрій, спосіб, реалізації
Формула / Реферат:
1. Спосіб керування асинхронним двигуном, що включає підключення асинхронного двигуна через перетворювач напруги до джерела промислової частоти, вимірювання миттєвих значень напруги та струму статорного ланцюга та розрахунок моменту двигуна, який відрізняється тим, що за даними вимірів розраховують миттєву потужність та момент двигуна, вилучають змінну складову моменту та подають на регулятор системи імпульсно-фазового керування тиристорним...
Спосіб керування асинхронним двигуном та електропривід, що його реалізує
Номер патенту: 31656
Опубліковано: 15.12.2000
Автор: Михайлюта Сергій Леонтійович
МПК: H02P 7/00, H02P 27/04
Мітки: спосіб, асинхронним, реалізує, електропривід, керування, двигуном
Текст:
...для забезпечення мінімального стру , статора, реактивна складова струну статора нае підтримуватись пропорційн активній складовій. На фіг Л зображена крива зміни моменту асинхронного двигуна 4A100L4 одержана в результаті моделювання, при зміні співвідношення складових стрn чиї запропонований спосіб керування асинхронним двнгуном дозволяє забезпечнт високі динамічні властивості електроприводу та мінімальне споживання струм від...
Пристрій керування асинхронним вентильним двигуном
Номер патенту: 80161
Опубліковано: 27.08.2007
Автори: Кохан Павло Степанович, Епштейн Ісаак Ізраілевич, Хоменко Олександр Андрійович
МПК: H02K 29/00, H02P 29/00
Мітки: двигуном, пристрій, керування, асинхронним, вентильним
Формула / Реферат:
Пристрій керування асинхронним вентильним двигуном, підключений до трифазної живильної мережі, який має трифазний мережний вимикач, перші клеми якого з'єднані з відповідними фазами трифазної живильної мережі, асинхронний вентильний двигун, датчик швидкості обертання ротора, що з'єднаний з ротором асинхронного вентильного двигуна, задатчик швидкості обертання, блок керування, до третього і четвертого входів якого підключені виходи відповідно...
Пристрій керування асинхронним вентильним двигуном
Номер патенту: 10620
Опубліковано: 15.11.2005
Автори: Хоменко Олександр Андрійович, Кохан Павло Степанович, Епштейн Ісаак Ізраілевич
МПК: H02K 29/00
Мітки: асинхронним, пристрій, керування, вентильним, двигуном
Формула / Реферат:
Пристрій керування асинхронним вентильним двигуном, що містить трифазну живильну мережу, трифазний мережний вимикач, перші клеми якого з'єднані з відповідними фазами трифазної живильної мережі, асинхронний вентильний двигун, датчик швидкості обертання ротора, що з'єднаний з ротором асинхронного вентильного двигуна, задатчик швидкості обертання, блок керування, до третього і четвертого входів якого підключені виходи відповідно датчика...
Спосіб управління синхронним двигуном та пристрій для його реалізації
Номер патенту: 64084
Опубліковано: 16.02.2004
Автори: Родькін Дмитро Йосипович, Чорний Олексій Петрович, Морозов Олександр Олександрович
МПК: G01R 31/34
Мітки: управління, сінхронним, реалізації, двигуном, спосіб, пристрій
Формула / Реферат:
1. Спосіб керування синхронним двигуном, що включає підключення двигуна до промислової мережі, подання на ротор напруги збудження, що містить постійну та змінну складові, який відрізняється тим, що в мережу збудження вводять складову струму з частотою 50 Гц регульованої амплітуди та фази по відношенню до напруги в мережі, задають амплітуду змінної складової струму збудження та здійснюють зміну кута зсуву фази змінної складової, контролюючи...
Попередній патент: Гетероциклічні інгібітори мек та їх застосування
Наступний патент: Газгідратний спосіб концентрування рідких біопрепаратів
Випадковий патент: Спосіб радикального хірургічного лікування перфоративної виразки дванадцятипалої кишки при гнійному перитоніті в токсичній фазі