Система контролю висіву насіння
Номер патенту: 84902
Опубліковано: 11.11.2013
Автори: Лобов Вячеслав Йосипович, Мірошник Аліна Вадимівна, Назаренко Володимир Михайлович, Дубовик Ігор Ігорович

Формула / Реферат
Система контролю висіву насіння, що містить з'єднані кабельним розведенням і закріплені на сівалці та тракторі монітор з дисплеєм і блоком обробки даних, що оснащений мікропроцесором і модернізованою операційною програмою; систему контролю висіву насіння, що містить датчики висіву та датчики: шляху, рівнів насіння і добрив у бункерах, температури масла в гідросистемі, оборотів вентилятора та дозатора; монітор з дисплеєм, що виконаний у вигляді пульта оператора, основним елементом якого є графічний індикатор, і мікропроцесор, який здійснює зв'язок із блоком обробки даних по каналу зв'язку CAN для колісної техніки, мікропроцесор обробки даних здійснює зв'язок з інтелектуальними ємнісними накладними датчиками по каналу зв'язку PC і підготовлює їх для передачі по каналу зв'язку CAN, яка відрізняється тим, що система контролю висіву насіння в пульті оператора містить: блок навігації, який складається з контролера, комутатора GPS/GSM і роз'єми для підключення живлення, інтерфейсу й антен; блок порадника тракториста з виконання робіт при висіванні насіння, вхід якого підключено до з'єднання виходу блока навігації з першим входом мікропроцесора пульта оператора, другий вхід якого підключений до виходу блока порадника тракториста з виконання робіт при висіванні насіння, який оснащений модулями конфігурації і дійсного стану поля, входи яких з'єднані між собою, а їх виходи сполучені з першим і другим входами модуля визначення способу переміщення трактора, третій і четвертий входи якого підключені відповідно до виходів модулів задання параметрів трактора і сівалки, а його п'ятий вхід приєднаний до входів модулів конфігурації і дійсного стану поля і шостий вхід зв'язаний з першим виходом модуля вводу даних, а другий і третій виходи відповідно підключені до перших входів модулів контролю насіння й визначення способу його посіву і контролю рівня добрив й визначення кількості його внесення, а другі їх входи з'єднані з першим і другим виходами модуля визначення способу переміщення трактора, їх виходи підключені відповідно до першого і другого входу модуля виводу даних, третій вхід від якого підключений до третього виходу модуля визначення способу переміщення трактора.
Текст
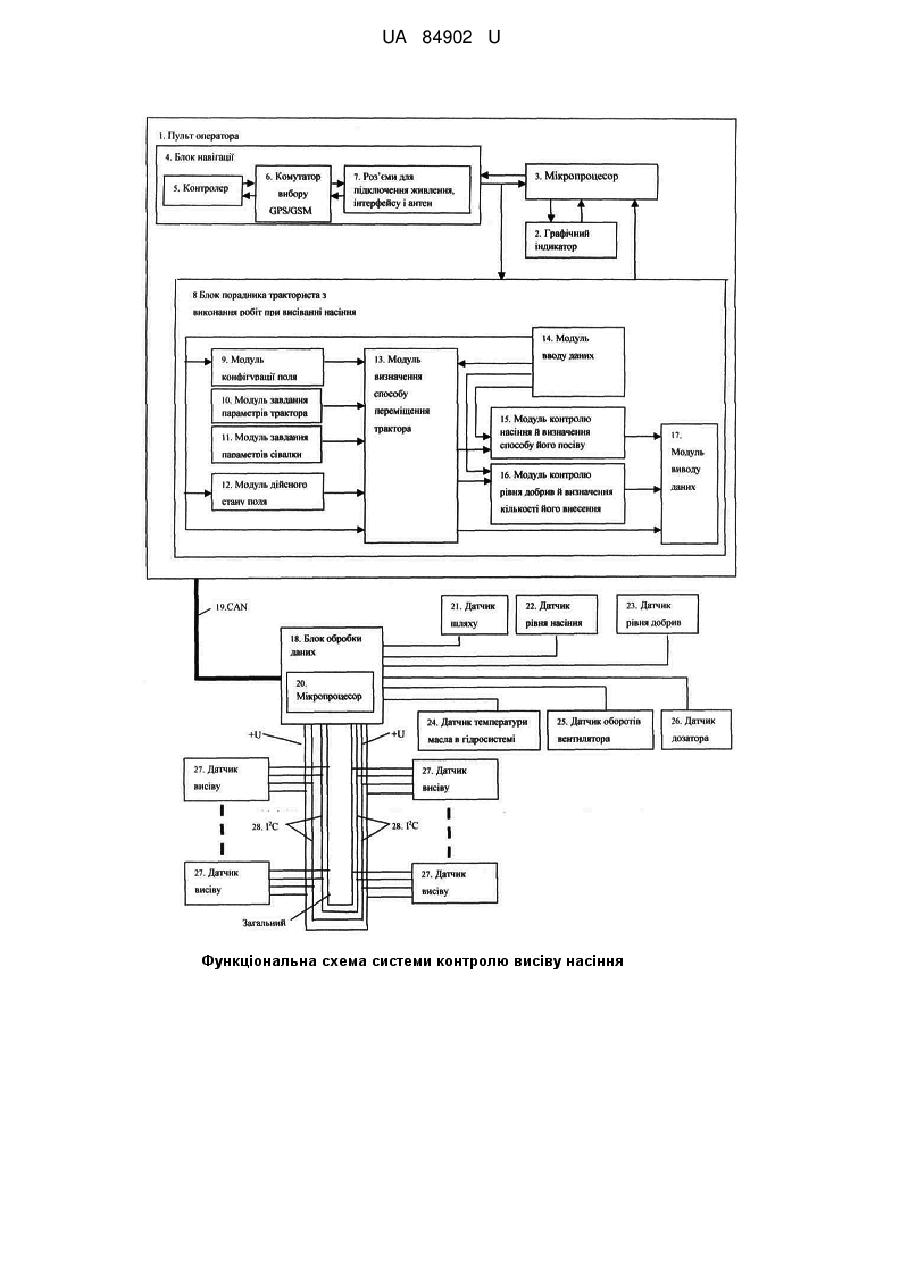
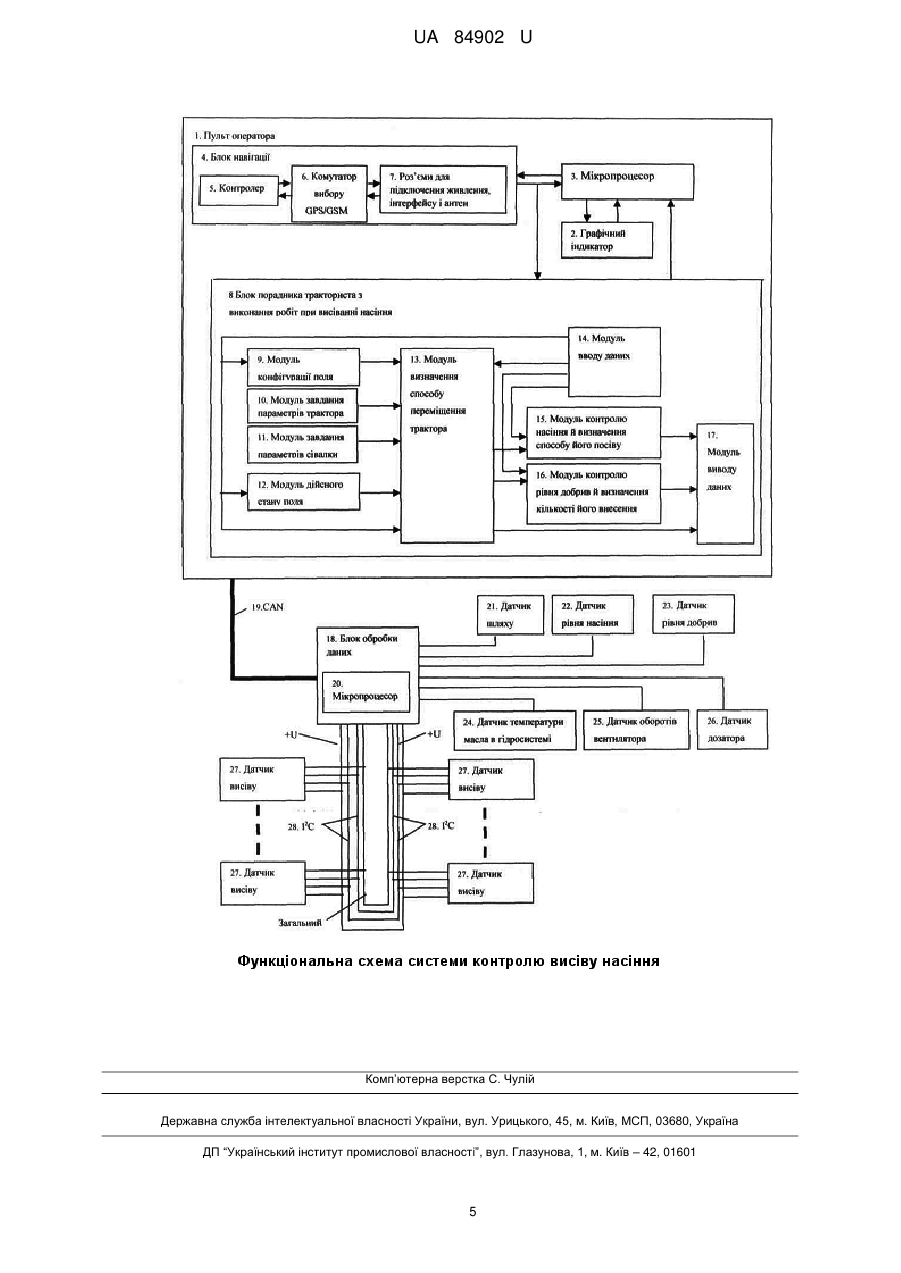
Реферат: Система контролю висіву насіння містить з'єднані кабельним розведенням і закріплені на сівалці та тракторі монітор з дисплеєм і блоком обробки даних, що оснащений мікропроцесором і операційною програмою; систему контролю висіву насіння, що містить датчики висіву та датчики: шляху, рівнів насіння і добрив у бункерах, температури масла в гідросистемі, оборотів вентилятора та дозатора; монітор з дисплеєм, що виконаний у вигляді пульта оператора, основним елементом якого є графічний індикатор і мікропроцесор, який здійснює зв'язок із блоком обробки даних по каналу зв'язку CAN для колісної техніки, мікропроцесор обробки даних здійснює зв'язок з інтелектуальними ємнісними накладними датчиками по каналу зв'язку PC і підготовлює їх для передачі по каналу зв'язку CAN. Система контролю висіву насіння в пульті оператора містить: блок навігації, який складається з контролера, комутатора GPS/GSM і роз'єми для підключення живлення, інтерфейсу й антен; блок порадника тракториста з виконання робіт при висіванні насіння, вхід якого підключено до з'єднання виходу блока навігації з першим входом мікропроцесора пульта оператора, другий вхід якого підключений до виходу блока порадника тракториста з виконання робіт при висіванні насіння, який оснащений модулями конфігурації і дійсного стану поля, входи яких з'єднані між собою, а їх виходи сполучені з першим і другим входами модуля визначення способу переміщення трактора, третій і четвертий входи якого підключені відповідно до виходів модулів задання параметрів трактора і сівалки, а його п'ятий вхід приєднаний до входів модулів конфігурації і дійсного стану поля і шостий вхід зв'язаний з першим виходом модуля вводу даних, а другий і третій виходи відповідно підключені до перших входів модулів контролю насіння й визначення способу його посіву і контролю рівня добрив й визначення кількості його внесення. Другі їх входи з'єднані з першим і другим виходами модуля визначення способу переміщення трактора, їх виходи підключені відповідно до першого і другого входу модуля виводу даних, третій вхід від якого підключений до третього виходу модуля визначення способу переміщення трактора. UA 84902 U (12) UA 84902 U UA 84902 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до сільськогосподарського машинобудування, зокрема до устаткування сівалок, і призначена для контролю висіву насіння у польових умовах. Відома система контролю механічної сівалки Агро-Союз MD19, яка оснащена монодиском і призначена, перш за все, для посіву за технологією No-till. Сівалка забезпечує швидкий і точний посів при робочій швидкості до 8 км/год., і має: опціональний контролер керування секціями, що дозволяє незалежно піднімати і опускати сошники однієї секції знаряддя; монітор обертання валів; модуль контролю рядів в кабіні трактора, який управляє клапанами з електромагнітним керуванням, що піднімають і опускають сошники окремої секції знаряддя (або всіх секцій), а також має електронний агрометр, який виводить на екран площу поля та загальну оброблену площу в гектарах [http://www.agrosoyuz.ua/products/techniks-energo/sowing-complexes/md19]. Недоліком відомої системи є те, що вона не керує потік висіву посівного матеріалу, також не контролюються наповнення і витрати насіння у бункері, місцеположення сіваки на полі, подача і витрати рідкого добрива тощо. Найбільш близьким по технічній суті до запропонованого технічного рішення є патент на корисну модель України № 46183 "Система контролю висіву насіння" (МПК А01С 7/00, G01D 5/12, G01D 9/00 публ. 10.12.2009, Бюл. № 23, 2009 p.), який прийнятий за прототип. Система контролю висіву насіння, що містить з'єднані кабельним розведенням і закріплені на сівалці та тракторі монітор з дисплеєм і блоком обробки даних, що оснащений мікропроцесором і модернізованою операційною програмою; систему контролю висіву насіння, що містить датчики висіву та датчики: шляху, рівнів насіння і добрив у бункерах, температури масла в гідросистемі, оборотів вентилятора та дозатора; монітор з дисплеєм, що виконаний у вигляді пульта оператора, основним елементом якого є графічний індикатор і мікропроцесор, який здійснює зв'язок із блоком обробки даних по каналу зв'язку CAN для колісної техніки, мікропроцесор обробки даних здійснює зв'язок з інтелектуальними ємнісними накладними датчиками по каналу 2 зв'язку I C і підготовлює їх для передачі по каналу зв'язку CAN. Недоліком такого технічного рішення є відсутність поточної інформації про конфігурацію поля, стан поля, тип та місцеположення агрегату, які визначаються за допомогою GPSабо (і) GSM, що не дозволяє при сівбі порадити трактористу або автоматично розраховувати точні параметри переміщення трактора, а також потрібну кількість насіння згідно дійсним параметрам поля з оптимізацією паливо-мастильних матеріалів (ПММ). Тобто не можлива оптимізація процесів обробки ґрунту при знижених витратах. При цьому не враховуються техніко-економічні, технічні і агротехнічні дані агрегатів, які необхідно враховувати при контролі висіву насіння. Також залишається неможливим оперативне визначення способу переміщення трактора зважаючи на його тип та тип сівалки, що не дозволяє рекомендувати його для широкого застосування. Задачею створення корисної моделі є вдосконалення системи контролю висіву насіння за рахунок застосування в комплексі супутникової навігації GPS і GSM зв'язку, що дозволить накопичувати об'єктивну інформацію, аналізувати її та приймати швидкі і ефективні рішення. Технологічний результат від використання полягає в точному контролі висіву насіння та зменшені впливу людського фактора на якість роботи, а також своєчасній передачі інформації про контроль посіву до диспетчерського центру. Економічний результат від використання полягає у зниженні значних "зайвих" витрат із-за неефективного використання сільськогосподарської техніки. Зниження цих витрат вирішується за наступними напрямками: автоматизований облік всіх переміщень техніки, розрахунок пробігу й оброблених площ, виключення розкрадань ПММ (введення системи моніторингу витрат ПММ), визначення оптимальних маршрутів техніки по оброблюваних полях, визначення оптимальних маршрутів доставки насіння до прийому на сівалку, контроль за швидкістю переміщення техніки при виконанні польових робіт. Модель враховує техніко-економічні, технічні і агротехнічні дані агрегатів, які необхідно враховувати при контролі висіву насіння, що дозволяє також оперативно визначати спосіб переміщення трактора при посіві. Задача вирішується за рахунок того, що система контролю висіву насіння, містить з'єднані кабельним розведенням і закріплені на сівалці та тракторі монітор з дисплеєм і блоком обробки даних, що оснащений мікропроцесором і модернізованою операційною програмою; систему контролю висіву насіння, що містить датчики висіву та датчики: шляху, рівнів насіння і добрив у бункерах, температури масла в гідросистемі, оборотів вентилятора та дозатора; монітор з дисплеєм, що виконаний у вигляді пульта оператора, основним елементом якого є графічний індикатор і мікропроцесор, який здійснює зв'язок із блоком обробки даних по каналу зв'язку CAN для колісної техніки, мікропроцесор обробки даних здійснює зв'язок з інтелектуальними ємнісними накладними датчиками по каналу зв'язку PC і підготовлює їх для передачі по каналу зв'язку CAN. 1 UA 84902 U 5 10 15 20 25 30 35 40 45 50 55 60 Згідно з корисною моделлю, пульт оператора містить: блок навігації, який складається з контролера, комутатора GPS/GSM і роз'ємів для підключення живлення, інтерфейсу й антен; блок порадника тракториста з виконання робіт при висіванні насіння, вхід якого підключено до з'єднання виходу блока навігації з першим входом мікропроцесора пульта оператора, другий вхід якого підключений до виходу блока порадника тракториста з виконання робіт при висіванні насіння, який оснащений модулями конфігурації і дійсного стану поля, входи яких з'єднані між собою, а їх виходи сполучені з першим і другим входами модуля визначення способу переміщення трактора, третій і четвертий входи якого підключені відповідно до виходів модулів завдання параметрів трактора і сівалки, а його п'ятий вхід приєднаний до входів модулів конфігурації і дійсного стану поля і шостий вхід зв'язаний з першим виходом модуля вводу даних, а другий і третій виходи відповідно підключені до перших входів модулів контролю насіння й визначення способу його посіву і контролю рівня добрив й визначення кількості його внесення, а другі їх входи з'єднані з першим і другим виходами модуля визначення способу переміщення трактора, їх виходи підключені відповідно до першого і другого входу модуля виводу даних, третій вхід від якого підключений до третього виходу модуля визначення способу переміщення трактора. Суть запропонованого технічного рішення пояснюється кресленням, де на кресленні показана функціональна схема системи контролю висіву насіння. Система контролю висіву насіння має пульт оператора 1, що містить графічний індикатор 2 зв'язаний із мікропроцесором 3, блок навігації 4, який складається із контролера 5, комутатора вибору GPS/GSM 6 і роз'ємів для підключення живлення, інтерфейсу і антен 7, та блока порадника тракториста з виконання робіт при висіванні насіння 8. Вихід блока навігації 4 підключений до з'єднання першого входу мікропроцесора 3 і блока порадника тракториста з виконання робіт при висіванні насіння 8, вихід якого підключений до другого входу мікропроцесора 3. Для керування блоком навігації 4 від мікропроцесора 3 використовується його вхід. До складу блока 8 входять: модуль конфігурації поля 9, в якому зберігається карта регіону з параметрами посівного поля, модулі задання параметрів трактора 10 і сівалки 11, та модуль дійсного стану поля 12, в який входять дані про загальні відомості: земельні угіддя, сівозміни, фітосанітарні, агрохімічні й механічні склади ґрунтів та інше. Виходи модулів конфігурації поля 9, задання параметрів трактора 10 і сівалки 11 та дійсного стану поля 12 підключені до чотирьох входів модуля визначення способу переміщення трактора 13, й забезпечують формування оптимального переміщення трактора по полю за умови використання різного типу насіння, тобто визначаються швидкість і напрямок трактора, обчислюються ПММ тощо. Входи модулів конфігурації поля 9, дійсного стану поля 12 і перший вихід даних 14 підключені до п'ятого входу модуля визначення способу переміщення трактора 13. Другий і третій виходи модуля даних 14 з'єднані відповідно до входів модулів контролю насіння й визначення способу його посіву 15 і контролю рівня добрив й визначення кількості його внесення 16, другий вхід якого підключений до першого виходу модуля визначення способу переміщення трактора 13. Виходи модулів 15, 16 і другий вихід 13 здійснюють зв'язок відповідно з першим, другим і третім входами виводу даних 17. В блок 8 входять також модулі: вводу даних 14, контролю насіння й визначення способу його посіву 15, контролю рівня добрив й визначення кількості його внесення 16. В цих модулях вирішуються питання щодо міри висіву насіння та внесення потрібної кількості добрив з врахуванням інформації про реальний стан рівнів, висіву насіння та добрив, що контролюється датчиками рівня насіння 22, рівня добрив 23 та висіву 27. Обчислені дані в цих модулях і в модулі визначення способу переміщення 13 через модуль виводу даних 17 подаються у мікропроцесор 3, який через графічний індикатор 2 надає трактористу інформацію про потрібний і реальний стан висіву насіння. Пульт оператора 1 встановлюють у кабіні трактора. Зв'язок між ним і блоком обробки даних 18 організовують по каналу зв'язку CAN 19 для колісної техніки. Блок обробки даних 18 оснащений мікропроцесором 20 і модернізованою операційною програмою. Зібрана інформація мікропроцесором 20 з датчика шляху 21, датчиків рівня насіння 22 і добрив 23 у бункерах, датчика температури масла в гідросистемі 24, датчиків оборотів вентилятора 25 і дозатора 26 та інтелектуальних ємнісних накладних датчиків висіву 27 по 2 каналу зв'язку І С 28 підготовлюється для передачі по каналу зв'язку CAN 19. Система контролю висіву насіння працює в такий спосіб. У процесі сівби потік насіння по кожному насіннєпроводу контролюється інтелектуальними 2 ємнісними накладними датчиками висіву 27 і по каналу зв'язку І С 28 інформація передається в мікропроцесор 20. Кожний датчик висіву контролю висіву насіння. Мікропроцесор 20 блока 2 UA 84902 U 2 5 10 15 20 25 30 35 40 45 50 55 60 обробки даних 18 організує опитування датчиків висіву 27 по каналу зв'язку І С 28. Одночасно мікропроцесор 20 збирає інформацію з датчика шляху 21, датчиків рівня насіння 22 і добрив 23 у бункерах, датчика температури масла в гідросистемі 24, датчиків оборотів вентилятора 25 і 2 дозатора 26 та інтелектуальних ємнісних накладних датчиків висіву 27 по каналу зв'язку І С 28, обробляє отриману інформацію від них і підготовлює її для передачі по каналу зв'язку CAN 19. Мікропроцесор 20 формує повідомлення і забезпечує його передачу по каналу зв'язку CAN 19 для пульта оператора 1, в якому мікропроцесор 3 обробляє отриману інформацію. Оброблені дані мікропроцесором 3 пульта оператора 1 подаються на графічний індикатор 2 у вигляді гістограми. Це дає можливість контролювати проходження насіння через насіннєпроводи, а на цифрових індикаторах відображаються додатково контрольовані параметри: рівень насіння і добрив у бункерах, напруга бортової мережі, температура масла в гідросистемі, обороти вентилятора й дозатора, швидкість руху, пройдений шлях, засіяну площу тощо. У випадку зміни нормального стану будь-якого контрольованого параметра на аварійний або передаварійний, мікропроцесор 3 формує сигнали звукового й візуального оповіщення. В той же час, на вхід мікропроцесора 3 і вхід блока порадника тракториста з виконання робіт при висіванні насіння 8 подається сигнал з виходу блока навігації 4. Для цього за допомогою комутатора вибору GPS/GSM 6 і контролера 5 блока навігації 4 по командах з мікропроцесора 3 обробляється інформація про необхідність підключення GPS для визначення через супутникову навігацію на карті місцевості розташування посівного поля, його характеристики, конфігурацію, дійсний стан та місцеположення посівного агрегату на ньому, або (і) включення GSM для більш точного визначення місцеположення посівного агрегату і зв'язку з диспетчерським центром для передачі контрольованої інформації про контроль посіву насіння, роботу трактора і сівалки та їх показники. При цьому ця ж інформація (GPS або (і) GSM) з блока навігації 4 через інтерфейс роз'ємів 7 передається на вхід блока порадника тракториста з виконання робіт при висіванні насіння 8 і після обробки контролером 3 на графічний дисплей 2. Окрім цього, до роз'ємів 7 підключаються антени для забезпечення GPS навігації і GSM зв'язку, а до контролера 5, який керує роботою комутатора вибору GPS/GSM і через роз'єм 7 до елементів блоку навігації 4 подається напруга живлення. Блок порадника тракториста з виконання робіт при висіванні насіння 8 приймає інформацію через модуль вводу 14, яка подається з блока навігації 4 і мікроконтролера 20 блока обробки даних 18. Інформація супутникової навігації GPS обробляється у модулях 9 і 12, в яких, відповідно до карти місцевості визначаються границі посівного поля, місцеположення сівалки і трактора та дійсний стан цього поля. Перед посівом насіння тракторист, використовуючи модулі завдання параметрів трактора 10 і сівалки 11, вводить основні експлуатаційні показники, які підрозділяються на техніко-економічні, технічні і агротехнічні. До техніко-економічних показників належать продуктивність в агрегаті, тягові якості, трудомісткість обслуговування і відходу, металоємність та інші показники. До технічних – тип трактора, стійкість трактора (повздовжня і поперечна), тип двигуна, потужність двигуна, вантажопідйомність начіпної системи тощо. До агротехнічних – питомий тиск на ґрунт, прохідність в міжряддях (дорожній просвіт, абрис, захисні зони), маневреність в агрегаті, плавність ходу, точність дотримання руху по заданому напряму й інше. Ці дані дозволяють модулю способу переміщення трактора 13 вибрати оптимальну швидкість переміщення трактору по полю з урахуванням його конфігурації й характеристик, що визначається модулем 9 та модулем його дійсного стану 12. При цьому через модуль виводу даних 17 надаються рекомендації трактористу по характеристикам сівби насіння модулем 15 і внесенню необхідної кількості добрив модулем 16. Ці рекомендації і виявлені відхилення, визначені мікропроцесором 3, видаються на графічний індикатор 2 для прийняття остаточного рішення трактористом. Запропонована система контролю висіву насіння висівними апаратами з мікропроцесорним керуванням, що забезпечена GPS навігацією і GSM зв'язком, дозволяє забезпечити програмовані змінні норми висіву насіння і добрив з можливістю оперативного регулювання норми висіву під час роботи сівалки, в напрямку її руху з урахуванням границі, конфігурації, характеристик і дійсного стану посівного поля та місця положення на ньому посівного агрегату. Підвищення універсальності системи контролю висіву насіння досягається за рахунок застосування контролера з комутатором GPS навігації та GSM зв'язку. Це дозволить використовувати сівалки в технологіях точного землеробства, контролюючи процес висіву насіння не тільки трактористом, але й керівниками сільськогосподарських підприємств. Запропонована система контролю висіву насіння дозволяє заощадити до 15 % посівного матеріалу і, за розрахунками, сприятиме підвищенню урожайності сільськогосподарських культур в середньому на 5-7 ц/га за рахунок зменшення пропусків висіву насіння. 3 UA 84902 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 Система контролю висіву насіння, що містить з'єднані кабельним розведенням і закріплені на сівалці та тракторі монітор з дисплеєм і блоком обробки даних, що оснащений мікропроцесором і модернізованою операційною програмою; систему контролю висіву насіння, що містить датчики висіву та датчики: шляху, рівнів насіння і добрив у бункерах, температури масла в гідросистемі, оборотів вентилятора та дозатора; монітор з дисплеєм, що виконаний у вигляді пульта оператора, основним елементом якого є графічний індикатор, і мікропроцесор, який здійснює зв'язок із блоком обробки даних по каналу зв'язку CAN для колісної техніки, мікропроцесор обробки даних здійснює зв'язок з інтелектуальними ємнісними накладними датчиками по каналу зв'язку PC і підготовлює їх для передачі по каналу зв'язку CAN, яка відрізняється тим, що система контролю висіву насіння в пульті оператора містить: блок навігації, який складається з контролера, комутатора GPS/GSM і роз'єми для підключення живлення, інтерфейсу й антен; блок порадника тракториста з виконання робіт при висіванні насіння, вхід якого підключено до з'єднання виходу блока навігації з першим входом мікропроцесора пульта оператора, другий вхід якого підключений до виходу блока порадника тракториста з виконання робіт при висіванні насіння, який оснащений модулями конфігурації і дійсного стану поля, входи яких з'єднані між собою, а їх виходи сполучені з першим і другим входами модуля визначення способу переміщення трактора, третій і четвертий входи якого підключені відповідно до виходів модулів задання параметрів трактора і сівалки, а його п'ятий вхід приєднаний до входів модулів конфігурації і дійсного стану поля і шостий вхід зв'язаний з першим виходом модуля вводу даних, а другий і третій виходи відповідно підключені до перших входів модулів контролю насіння й визначення способу його посіву і контролю рівня добрив й визначення кількості його внесення, а другі їх входи з'єднані з першим і другим виходами модуля визначення способу переміщення трактора, їх виходи підключені відповідно до першого і другого входу модуля виводу даних, третій вхід від якого підключений до третього виходу модуля визначення способу переміщення трактора. 4 UA 84902 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюNazarenko Volodymyr Mykhailovych
Автори російськоюНазаренко Владимир Михайлович
МПК / Мітки
МПК: G01D 5/00, G01D 9/00, A01C 7/00
Мітки: контролю, насіння, висіву, система
Код посилання
<a href="https://ua.patents.su/7-84902-sistema-kontrolyu-visivu-nasinnya.html" target="_blank" rel="follow" title="База патентів України">Система контролю висіву насіння</a>
Система контролю висіву насіння
Номер патенту: 83471
Опубліковано: 10.09.2013
Автор: Журкіна Надія Миколаївна
Мітки: висіву, насіння, контролю, система
Формула / Реферат:
Система для контролю висіву насіння, що містить монітор, блок збору інформації, блок обробки даних, датчики висіву насіння, датчик шляху та кабельне розведення сівалки, яка відрізняється тим, що монітор являє собою планшетний комп'ютер, в який зашита програма роботи блока обробки даних, а блок збору інформації являє собою металевий корпус, що містить електронну плату з процесором, в який зашита програма роботи блока, до якої підключені...
Система для контролю висіву насіння
Номер патенту: 62849
Опубліковано: 12.09.2011
Автор: Журкіна Надія Миколаївна
МПК: G01D 9/00, G01D 5/00, A01C 7/00
Мітки: висіву, насіння, контролю, система
Формула / Реферат:
Система для контролю висіву насіння, що містить монітор, блок обробки даних, кабельну розводку сіялки, датчики висіву насіння та датчик шляху, програму, зашиту в контролер блоку обробки даних, яка відрізняється тим, що вимірювальний елемент датчика висіву насіння виконаний у вигляді металевої конструкції, в тіло якої вмонтовано пластини і фольгованого склотексталіту, які служать обкладками вимірювального конденсатора, екран монітора...
Система контролю висіву насіння
Номер патенту: 46183
Опубліковано: 10.12.2009
Автори: Шамановський Олександр Дмитрович, Шамановський Анатолій Дмитрович, Милаєнко Дмитро Володимирович
МПК: A01C 7/00, G01D 5/12, G01D 9/00
Мітки: насіння, система, контролю, висіву
Формула / Реферат:
1. Система контролю висіву насіння, що містить з'єднані кабельним розведенням і закріплені на сівалці та тракторі монітор з дисплеєм і блоком обробки даних, що оснащений швидкодіючим мікропроцесором і модернізованою операційною програмою, датчиками висіву та датчиком шляху, яка відрізняється тим, що система контролю висіву насіння містить також датчики рівня насіння і добрив у бункерах, датчик температури масла в гідросистемі, датчики...
Спосіб контролю норми висіву насіння на сівалках точного висіву
Номер патенту: 24830
Опубліковано: 10.07.2007
Автори: Пархоменко Юрій Михайлович, Златопольський Федір Йосипович, Лушников Вячеслав Михайлович, Рей Юліана Борисівна, Зінзура Василь Васильович, Пархоменко Михайло Давидович
МПК: A01C 7/00
Мітки: контролю, насіння, сівалках, точного, спосіб, висіву, норми
Формула / Реферат:
Спосіб контролю норми висівання насіння на сівалках точного висівання, що включає формування електричних сигналів при контролі висівання насіння датчиками висівання, встановленими в кожному висівному апараті сівалки точного висівання, формування електричних сигналів датчиком заданої норми висівання в штуках насіння на погонний метр, ввімкнення звукової сигналізації і світлової індикації, який відрізняється тим, що для кожного висівного...
Спосіб контролю висіву насіння
Номер патенту: 84415
Опубліковано: 25.10.2013
Автори: Шамановський Олександр Дмитрович, Милаєнко Дмитро Володимирович, Шамановський Анатолій Дмитрович
МПК: A01C 7/00
Мітки: висіву, контролю, насіння, спосіб
Формула / Реферат:
1. Спосіб контролю висіву насіння, який включає контроль і відображення інформації про поточну швидкість руху і про поточний стан датчиків робочих органів сівалки/посівного комплексу, контроль якості висіву та відображення цієї інформації на екрані пульта оператора, оперативне звукове та візуальне сповіщення в разі зміни нормального стану контрольованого параметра на аварійне, або передаварійне, можливість зняття /постановки на контроль...
Попередній патент: Зварювальна губка пакувальної машини
Наступний патент: Спосіб визначення рівня механічних коливань поверхні твердого середовища при дії на його поверхню динамічних навантажень механічного походження
Випадковий патент: Збір для припинення кровотеч є. товстухи