Підкопуюче обладнання для зрізання та евакуації ґрунту з-під трубопроводу
Номер патенту: 88171
Опубліковано: 11.03.2014
Автори: Карпенко Олександр Миколайович, Мусійко Володимир Данилович

Формула / Реферат
1. Підкопуюче обладнання для зрізання та евакуації ґрунту з-під трубопроводу, яке містить несучу раму (2), один кінець якої пристосований для її встановлення на рукояті екскаватора, землерийний робочий орган (1), який змонтований на другому кінці несучої рами (2) та пристосований для зрізання та евакуації ґрунту з-під трубопроводу (4), і пристрій позиціонування (3) для орієнтування обладнання відносно трубопроводу (4), який містить уловлювач (18), що має каркас (37), який прикріплений до нижньої частини підвіски (20, 21, 28), верхня частина якої підвішена з можливістю вільного гойдання навколо осей (20), які співвісні осі шарніра кріплення несучої рами (3) до рукояті (50) екскаватора, та упори (40), які мають опорні поверхні для обпирання на трубопровід (4), яке відрізняється тим, що уловлювач (18) пристосований для налаштування положення опорних поверхонь упорів (40) для обпирання на трубопроводи (4) щонайменше двох типорозмірів.
2. Підкопуюче обладнання за попереднім пунктом, яке відрізняється тим, що уловлювач (18) пристосований для налаштування положення опорних поверхонь упорів (40) для обпирання на трубопроводи (4) щонайменше двох типорозмірів, таким чином, що радіальна відстань (hi) від верхньої поверхні трубопроводу (4) до каркаса (37) уловлювача (18), яка виміряна у вертикальній площині, у якій лежить поздовжня вісь (36) трубопроводу (4), практично не залежить від типорозміру (D) трубопроводу.
3. Підкопуюче обладнання за будь-яким попереднім пунктом, яке відрізняється тим, що на кінцевих кронштейнах каркаса (37) встановлені регульовані по куту нахилу важелі (38, 39), на кінцях яких змонтовані зазначені упори (40) з опорними поверхнями для обпирання на трубопровід (4).
4. Підкопуюче обладнання за попереднім пунктом, яке відрізняється тим, що важелі (38 і 39) встановлені на кінцевих кронштейнах каркаса (37) з можливістю повороту щодо болтів (41 і 42) або інших деталей типу пальця та зафіксовані від повороту іншими болтами (43 і 44) або іншими деталями типу пальця, які встановлені в необхідних отворах, групи отворів, які виконані у цих кронштейнах каркаса (37) під кожний типорозмір трубопроводу.
5. Підкопуюче обладнання за будь-яким попереднім пунктом, яке відрізняється тим, що каркас (37) уловлювача (18) прикріплений до нижньої частини підвіски (20, 21, 28) за допомогою змінних дистанційних стійок (19), довжина, яких вибрана таким чином, що радіальна відстань (h2) від нижньої поверхні трубопроводу (4) до елементів обладнання, яка виміряна у вертикальній площині, у якій лежить поздовжня вісь (36) трубопроводу (4), практично не залежить від типорозміру (D) трубопроводу.
Текст
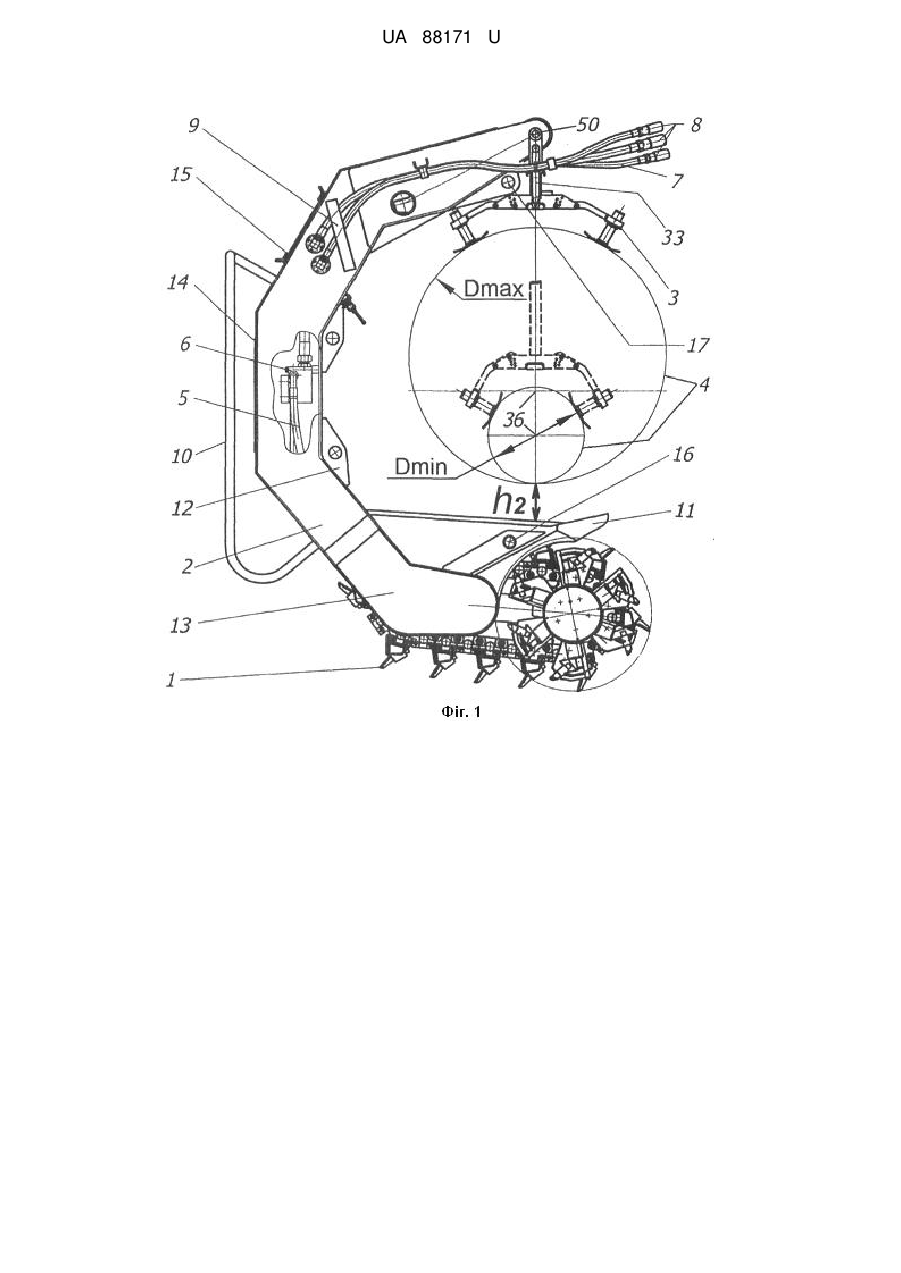
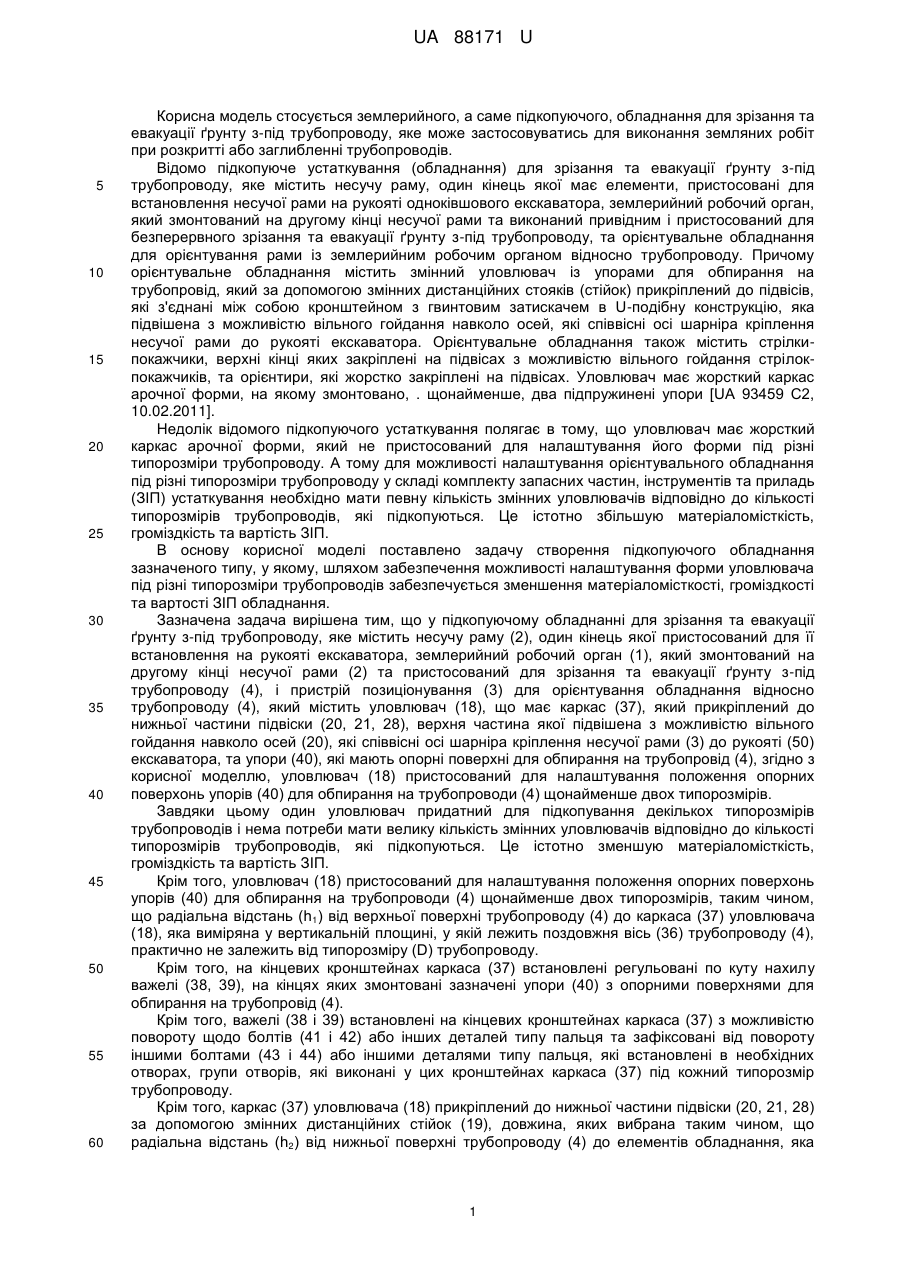
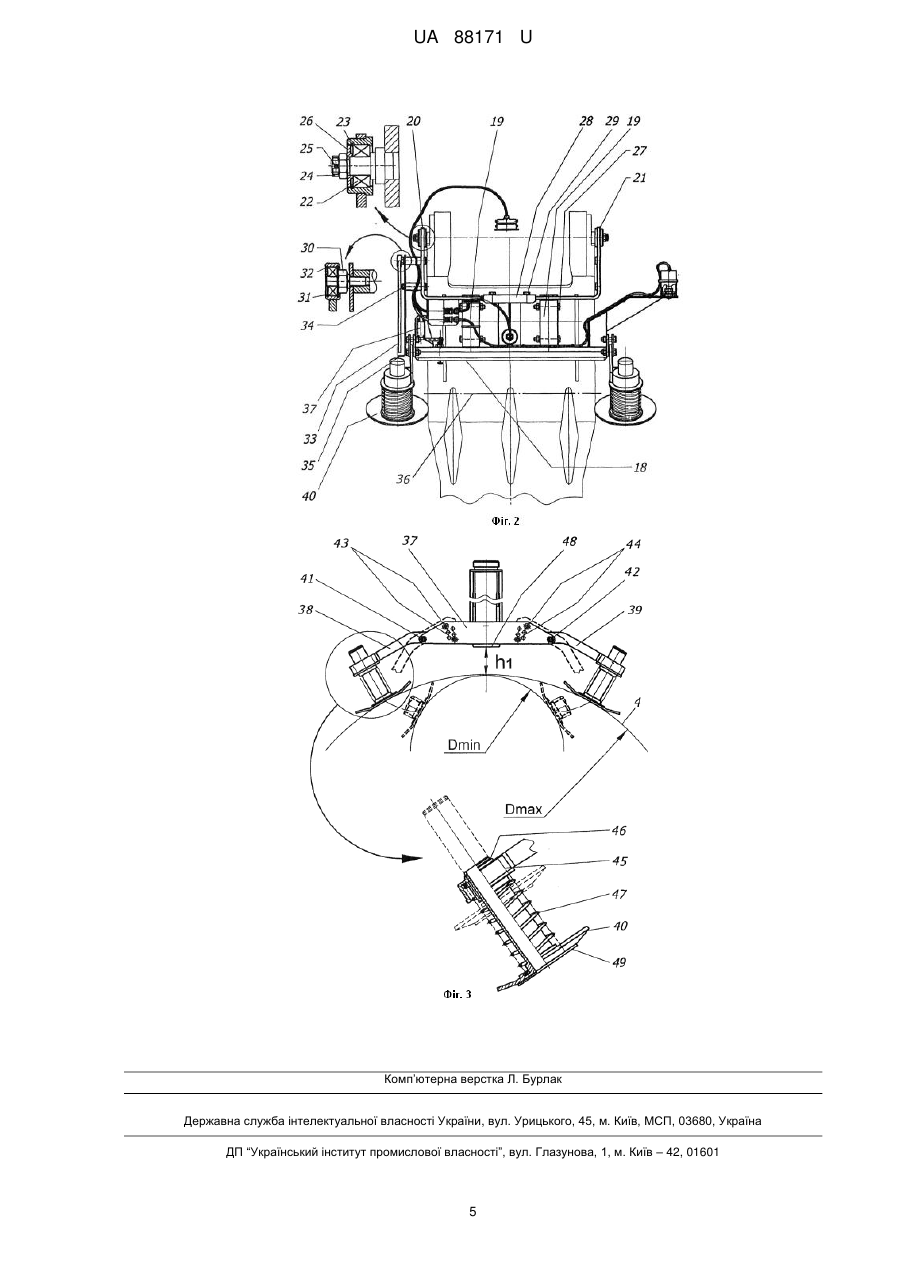
Реферат: Підкопуюче обладнання для зрізання та евакуації ґрунту з-під трубопроводу, яке містить несучу раму (2), один кінець якої пристосований для її встановлення на рукояті екскаватора, землерийний робочий орган (1), який змонтований на другому кінці несучої рами (2) та пристосований для зрізання та евакуації ґрунту з-під трубопроводу (4), і пристрій позиціонування (3) для орієнтування обладнання відносно трубопроводу (4), який містить уловлювач (18), що має каркас (37), який прикріплений до нижньої частини підвіски (20, 21, 28), верхня частина якої підвішена з можливістю вільного гойдання навколо осей (20), які співвісні осі шарніра кріплення несучої рами (3) до рукояті (50) екскаватора, та упори (40), які мають опорні поверхні для обпирання на трубопровід (4), причому уловлювач (18) пристосований для налаштування положення опорних поверхонь упорів (40) для обпирання на трубопроводи (4) щонайменше двох типорозмірів. UA 88171 U (54) ПІДКОПУЮЧЕ ОБЛАДНАННЯ ДЛЯ ЗРІЗАННЯ ТА ЕВАКУАЦІЇ ҐРУНТУ З-ПІД ТРУБОПРОВОДУ UA 88171 U UA 88171 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель стосується землерийного, а саме підкопуючого, обладнання для зрізання та евакуації ґрунту з-під трубопроводу, яке може застосовуватись для виконання земляних робіт при розкритті або заглибленні трубопроводів. Відомо підкопуюче устаткування (обладнання) для зрізання та евакуації ґрунту з-під трубопроводу, яке містить несучу раму, один кінець якої має елементи, пристосовані для встановлення несучої рами на рукояті одноківшового екскаватора, землерийний робочий орган, який змонтований на другому кінці несучої рами та виконаний привідним і пристосований для безперервного зрізання та евакуації ґрунту з-під трубопроводу, та орієнтувальне обладнання для орієнтування рами із землерийним робочим органом відносно трубопроводу. Причому орієнтувальне обладнання містить змінний уловлювач із упорами для обпирання на трубопровід, який за допомогою змінних дистанційних стояків (стійок) прикріплений до підвісів, які з'єднані між собою кронштейном з гвинтовим затискачем в U-подібну конструкцію, яка підвішена з можливістю вільного гойдання навколо осей, які співвісні осі шарніра кріплення несучої рами до рукояті екскаватора. Орієнтувальне обладнання також містить стрілкипокажчики, верхні кінці яких закріплені на підвісах з можливістю вільного гойдання стрілокпокажчиків, та орієнтири, які жорстко закріплені на підвісах. Уловлювач має жорсткий каркас арочної форми, на якому змонтовано, . щонайменше, два підпружинені упори [UA 93459 С2, 10.02.2011]. Недолік відомого підкопуючого устаткування полягає в тому, що уловлювач має жорсткий каркас арочної форми, який не пристосований для налаштування його форми під різні типорозміри трубопроводу. А тому для можливості налаштування орієнтувального обладнання під різні типорозміри трубопроводу у складі комплекту запасних частин, інструментів та приладь (ЗІП) устаткування необхідно мати певну кількість змінних уловлювачів відповідно до кількості типорозмірів трубопроводів, які підкопуються. Це істотно збільшую матеріаломісткість, громіздкість та вартість ЗІП. В основу корисної моделі поставлено задачу створення підкопуючого обладнання зазначеного типу, у якому, шляхом забезпечення можливості налаштування форми уловлювача під різні типорозміри трубопроводів забезпечується зменшення матеріаломісткості, громіздкості та вартості ЗІП обладнання. Зазначена задача вирішена тим, що у підкопуючому обладнанні для зрізання та евакуації ґрунту з-під трубопроводу, яке містить несучу раму (2), один кінець якої пристосований для її встановлення на рукояті екскаватора, землерийний робочий орган (1), який змонтований на другому кінці несучої рами (2) та пристосований для зрізання та евакуації ґрунту з-під трубопроводу (4), і пристрій позиціонування (3) для орієнтування обладнання відносно трубопроводу (4), який містить уловлювач (18), що має каркас (37), який прикріплений до нижньої частини підвіски (20, 21, 28), верхня частина якої підвішена з можливістю вільного гойдання навколо осей (20), які співвісні осі шарніра кріплення несучої рами (3) до рукояті (50) екскаватора, та упори (40), які мають опорні поверхні для обпирання на трубопровід (4), згідно з корисної моделлю, уловлювач (18) пристосований для налаштування положення опорних поверхонь упорів (40) для обпирання на трубопроводи (4) щонайменше двох типорозмірів. Завдяки цьому один уловлювач придатний для підкопування декількох типорозмірів трубопроводів і нема потреби мати велику кількість змінних уловлювачів відповідно до кількості типорозмірів трубопроводів, які підкопуються. Це істотно зменшую матеріаломісткість, громіздкість та вартість ЗІП. Крім того, уловлювач (18) пристосований для налаштування положення опорних поверхонь упорів (40) для обпирання на трубопроводи (4) щонайменше двох типорозмірів, таким чином, що радіальна відстань (h1) від верхньої поверхні трубопроводу (4) до каркаса (37) уловлювача (18), яка виміряна у вертикальній площині, у якій лежить поздовжня вісь (36) трубопроводу (4), практично не залежить від типорозміру (D) трубопроводу. Крім того, на кінцевих кронштейнах каркаса (37) встановлені регульовані по куту нахилу важелі (38, 39), на кінцях яких змонтовані зазначені упори (40) з опорними поверхнями для обпирання на трубопровід (4). Крім того, важелі (38 і 39) встановлені на кінцевих кронштейнах каркаса (37) з можливістю повороту щодо болтів (41 і 42) або інших деталей типу пальця та зафіксовані від повороту іншими болтами (43 і 44) або іншими деталями типу пальця, які встановлені в необхідних отворах, групи отворів, які виконані у цих кронштейнах каркаса (37) під кожний типорозмір трубопроводу. Крім того, каркас (37) уловлювача (18) прикріплений до нижньої частини підвіски (20, 21, 28) за допомогою змінних дистанційних стійок (19), довжина, яких вибрана таким чином, що радіальна відстань (h2) від нижньої поверхні трубопроводу (4) до елементів обладнання, яка 1 UA 88171 U 5 10 15 20 25 30 35 40 45 50 55 60 виміряна у вертикальній площині, у якій лежить поздовжня вісь (36) трубопроводу (4), практично не залежить від типорозміру (D) трубопроводу. Корисна модель пояснюється кресленнями, на яких на фіг. 1 зображено підкопуюче обладнання, вигляд збоку (вздовж осі трубопроводу); на фіг. 2 - пристрій позиціонування, вид перпендикулярно осі трубопроводу; на фіг. 3 - уловлювач пристрою позиціонування, вид вздовж осі трубопроводу. Підкопуюче обладнання для зрізання та евакуації ґрунту з-під трубопроводу, як показано на фіг. 1, має ланцюговий землерийний робочий орган 1, встановлений на нижньому кінці вигнутої несучої рами 2, яка виготовлена у вигляді скобоподібної зварної несучої балки коробчастого перетину, вигин якої дозволяє здійснювати розробку ґрунту під трубопроводами діаметром, наприклад від Dmin=520 мм до Dmax=1420 мм включно. На другом верхньому кінці рами 2, який пристосований для встановлення на рукояті екскаватора, змонтовано пристрій позиціонування 3, який дозволяє розташувати устаткування над трубою з дотриманням необхідних відстаней між його елементами і поверхнею трубопроводу 4. Всередині несучої рами 2 розміщені рукави 5 і елементи 6 гідравлічного приводу робочого органа 1. Рукави 7 підключення гідравлічного обладнання мають муфти швидкодіючих з'єднань 8, причому на бокових стінках рами 2 приварені запобіжні скоби 9 захисту рукавів 7 і опорні полозки 10, які слугують для установки устаткування для підкопування в положення, яке зручне для транспортування та обслуговування. На рамі 2 також закріплено захисний козирок 11, який захищає трубу 4 від випадкового контакту з різцями ланцюга робочого органу 1 та, як горизонтальний ніж, зрізує стружку ґрунту з нижньої частини труби 4. На рамі 2 також закріплено вертикальні ножі 12, які розколюють масив ґрунту на бокових стінках труби. Вікна доступу до елементів гідророзводки і привода робочого органа закриті знімними кришками 13, 14 і 15. Рама 2 оснащена елементами, у яких виконані стропувальні вікна 16, 17. В інших деталях, які не описані та не показані на кресленнях, ланцюговий землерийний робочий орган 1 та несуча рама 2 можуть бути виконані так, як це розкрито у UA 93459 С2. Пристрій позиціонування (фіг. 2) являє собою збірну конструкцію, що складається з механічного уловлювача 18, закріпленого за допомогою дистанційних стійок 19 до підвіски, яка містить два підвіси 20 і 21. Підвіси 20 і 21 виконані з можливістю вільно хитатись на підшипниках 22, встановлених по осі шарніра кріплення підкопуючого обладнання до рукояті екскаватора, що дозволяє стійкам 19 займати вертикальне положення незалежно від кута повороту підкопуючого обладнання. Підшипники 22 кріпляться в корпусах підвісів 20 і 21 стопорними кільцями 23, і корончатої гайки 24 зі шплинтами 25 через спеціальні шайби 26. Дистанційні стійки 19 кріпляться до уловлювача 18 і підвісів 20 і 21 болтовими з'єднаннями 27. Між собою підвіси 20 і 21 з'єднані в U-конструкцію (підвіску) кронштейном 28 за допомогою болтових з'єднань 29. На підвісі 20, на вкрученій до нього осі 30, встановлена з можливістю вільно обертатися на підшипнику 31 (8) і закріплена стопорними кільцями 32 (9) стрілка-покажчик 33. Також на підвісі 20 за допомогою болтів 34, встановлений орієнтир 35. Стрілка-покажчик 33 і орієнтир 35 пофарбовані в кольори, контрастні до кольорів забарвлення дистанційних стійок 19 і решти обладнання, що дозволяє візуально контролювати положення пристрою позиціонування щодо вертикалі. Для пристрою позиціонування (фіг. 2, 3) передбачена переналагодження під різні типорозміри трубопроводу. Переналагодження полягає в установці дистанційних стійок 19 певної довжини, індивідуальних для кожного типорозміру трубопроводу 4 і переналадці уловлювача 18, конструкція якого розглянута на фіг. 3. Дистанційні стійки мають відповідне маркування і складають комплект змінних частин, що входить в комплект ЗІП підкопуючого обладнання. Уловлювач 18 (фіг. 3) являє собою пристрій, що здійснює безпосередній контакт з поверхнею трубопроводу 4. Він призначений для запобігання вільного коливального гойдання пристрою позиціонування при центруванні шарніра повороту підкопуючого обладнання щодо поздовжньої осі 36 трубопроводу 4 у вертикальному і горизонтальному напрямках. Уловлювач 18 складається з жорсткого зварного каркаса 37, на кінцевих кронштейнах якого встановлені регульовані по куту нахилу важелі 38 і 39, які мають підпружинені рухливі упори 40. Регулювання важелів 38 і 39 провадиться за рахунок їх повороту щодо болтів 41 і 42 (або інших деталей типу пальця) з перестановкою і затягуванням болтів 43 і 44 (або інших деталей типу пальця) в необхідних отворах кронштейнів каркаса 37. Упори 40 переміщаються в напрямних втулках 45 важелів 38 і 39, і закріплені стопорними кільцями 46. Уловлювач 18 є пристроєм, що забезпечує самоустановлюваність щодо поздовжньої вісі труби 4. Точність установки і зусилля притиснення упорів 40 до поверхні трубопроводу 4, визначаються точністю виготовлення і 2 UA 88171 U 5 10 15 20 25 30 35 40 45 50 55 60 силовими характеристиками пружин 47. Така конструкція уловлювача є простою і надійною у роботі. На внутрішній балці каркаса 37 закріплений гумовий демпфер 48, а на упорах 40 важелів 38 і 39 - гумові демпфери 49. Демпфери 48 і 49 виключають торкання металевих деталей уловлювача до поверхні трубопроводу 4. Причому уловлювач 18 пристосований для налаштування положення опорних поверхонь упорів 40 для обпирання на трубопроводи 4 щонайменше двох типорозмірів, таким чином, що радіальна відстань h1 (фіг. 3) від верхньої поверхні трубопроводу 4 до каркаса 37 уловлювача 18, яка виміряна у вертикальній площині, у якій лежить поздовжня вісь 36 трубопроводу 4, практично не залежить від типорозміру D трубопроводу. Довжина змінних дистанційних стійок 19 вибрана таким чином, що радіальна відстань h2 від нижньої поверхні трубопроводу 4 до елементів обладнання, яка виміряна у вертикальній площині, у якій лежить поздовжня вісь 36 трубопроводу 4, практично не залежить від типорозміру D трубопроводу. Це забезпечує надійне орієнтування підкопуючого обладнання відносно трубопроводів різних типорозмірів, а відтак безпечність процесу їх підкопування. Підкопуюче обладнання працює наступним чином. Після приєднання підкопуючого обладнання до рукояті екскаватора, рукави 7 гідророзводки підкопуючого устаткування підключаються роз'ємами 8 до відповідних роз'ємів гідроапаратури екскаватора. Подавання підкопуючого обладнання в траншею до труби 4 і повертання робочого органу 1 відносно точки (осі) підвісу 50 виконується гідроциліндрами екскаватора. При цьому рукоять екскаватора і відповідно підкопуюче обладнання орієнтують у площині, яка перпендикулярна поздовжній осі 36 трубопроводу 4, як це показано на фіг. 1. Раму 2 повертають за часовою стрілкою на фіг. 1 так, щоб робочий орган 1 був розташований з боку від трубопроводу 4. Переміщеннями екскаватора та його рукояті встановлюють точку (вісь) підвісу 50 над поздовжньою віссю 36 трубопроводу і опускають підкопуюче обладнання до контакту упорів 40 уловлювача 18 із поверхнею трубопроводу. Орієнтуючись на положення стрілки-покажчика 33 відносно орієнтира 35 коригують положення точки (осі) підвісу 50, добиваючись співпадіння положень стрілки-покажчика 33 і орієнтира 35, що свідчить про розташування точки (осі) підвісу 50 у вертикальній площині, у якій лежить поздовжня вісь 36 трубопроводу 4. Після цього гідравлічна рідина по рукавах 7 і 5 подається до гідромоторів ланцюгового робочого органу 1, які приводять його у дію, і одночасно раму 2 повертають проти часової стрілки на фіг. 1. Робочим органом 1 виконується розробка ґрунту та його евакуація в приямок траншеї. Після повного видалення грунта з під трубопроводу напрямок повороту рами 2 змінюють на протилежний і таким чином робочий орган 1 повністю виводять із під трубопроводу 4. Необхідний напрямок та швидкість руху ланцюгів робочого органу 1 регулюється оператором із кабіни екскаватора встановленням відповідних режимів подачі робочої рідини від гідросистеми екскаватора. Підйомом рукояті екскаватора упори 40 уловлювача 18 відводять від поверхні трубопроводу 4, переміщують екскаватор вздовж осі 36 трубопроводу 4 на величину ширини робочого органа 1 і повторюють цикл зрізання та евакуації ґрунту з-під трубопроводу 4. Підкопуюче обладнання завдяки можливості переналагодження пристрою позиціонування спроможне евакуювати ґрунт з-під трубопроводів діаметрами, наприклад, від Dmin=520 мм до Dmax=1420 мм включно. Переналагодження пристрою позиціонування під різні типорозміри трубопроводу полягає в установці дистанційних стійок 19 певної довжини, індивідуальної для кожного типорозміру трубопроводу 4, і переналадці уловлювача 18, шляхом регулювання кута нахилу важелі 38, 39. Регулювання важелів 38, 39 провадиться за шляхом їх повороту щодо болтів 41, 42 з перестановкою і затягуванням болтів 43, 44 в необхідних отворах кронштейнів каркаса 37 (фіг. 3). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Підкопуюче обладнання для зрізання та евакуації ґрунту з-під трубопроводу, яке містить несучу раму (2), один кінець якої пристосований для її встановлення на рукояті екскаватора, землерийний робочий орган (1), який змонтований на другому кінці несучої рами (2) та пристосований для зрізання та евакуації ґрунту з-під трубопроводу (4), і пристрій позиціонування (3) для орієнтування обладнання відносно трубопроводу (4), який містить уловлювач (18), що має каркас (37), який прикріплений до нижньої частини підвіски (20, 21, 28), верхня частина якої підвішена з можливістю вільного гойдання навколо осей (20), які співвісні осі шарніра кріплення несучої рами (3) до рукояті (50) екскаватора, та упори (40), які мають опорні поверхні для обпирання на трубопровід (4), яке відрізняється тим, що уловлювач (18) 3 UA 88171 U 5 10 15 20 пристосований для налаштування положення опорних поверхонь упорів (40) для обпирання на трубопроводи (4) щонайменше двох типорозмірів. 2. Підкопуюче обладнання за попереднім пунктом, яке відрізняється тим, що уловлювач (18) пристосований для налаштування положення опорних поверхонь упорів (40) для обпирання на трубопроводи (4) щонайменше двох типорозмірів, таким чином, що радіальна відстань (hi) від верхньої поверхні трубопроводу (4) до каркаса (37) уловлювача (18), яка виміряна у вертикальній площині, у якій лежить поздовжня вісь (36) трубопроводу (4), практично не залежить від типорозміру (D) трубопроводу. 3. Підкопуюче обладнання за будь-яким попереднім пунктом, яке відрізняється тим, що на кінцевих кронштейнах каркаса (37) встановлені регульовані по куту нахилу важелі (38, 39), на кінцях яких змонтовані зазначені упори (40) з опорними поверхнями для обпирання на трубопровід (4). 4. Підкопуюче обладнання за попереднім пунктом, яке відрізняється тим, що важелі (38 і 39) встановлені на кінцевих кронштейнах каркаса (37) з можливістю повороту щодо болтів (41 і 42) або інших деталей типу пальця та зафіксовані від повороту іншими болтами (43 і 44) або іншими деталями типу пальця, які встановлені в необхідних отворах, групи отворів, які виконані у цих кронштейнах каркаса (37) під кожний типорозмір трубопроводу. 5. Підкопуюче обладнання за будь-яким попереднім пунктом, яке відрізняється тим, що каркас (37) уловлювача (18) прикріплений до нижньої частини підвіски (20, 21, 28) за допомогою змінних дистанційних стійок (19), довжина, яких вибрана таким чином, що радіальна відстань (h2) від нижньої поверхні трубопроводу (4) до елементів обладнання, яка виміряна у вертикальній площині, у якій лежить поздовжня вісь (36) трубопроводу (4), практично не залежить від типорозміру (D) трубопроводу. 4 UA 88171 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюKARPENKO OLEKSANDR MYKOLAIOVYCH, MUSIIKO VOLODYMYR DANYLOVYCH
Автори російськоюКАРПЕНКО АЛЕКСАНДР НИКОЛАЕВИЧ, МУСИЙКО ВЛАДИМИР ДАНИЛОВИЧ
МПК / Мітки
Мітки: ґрунту, підкопуюче, з-під, трубопроводу, обладнання, зрізання, евакуації
Код посилання
<a href="https://ua.patents.su/7-88171-pidkopuyuche-obladnannya-dlya-zrizannya-ta-evakuaci-runtu-z-pid-truboprovodu.html" target="_blank" rel="follow" title="База патентів України">Підкопуюче обладнання для зрізання та евакуації ґрунту з-під трубопроводу</a>
Підкопуюче устаткування для зрізання та евакуації ґрунту з-під трубопроводу
Номер патенту: 93459
Опубліковано: 10.02.2011
Автори: Мусійко Володимир Данилович, Карпенко Олександр Миколайович
Мітки: устаткування, евакуації, підкопуюче, трубопроводу, ґрунту, з-під, зрізання
Формула / Реферат:
1. Підкопуюче устаткування для зрізання та евакуації ґрунту з-під трубопроводу, яке містить несучу раму (3), один кінець якої має елементи (17, 18, 19), пристосовані для встановлення несучої рами (3) на рукояті (50) одноківшового екскаватора, землерийний робочий орган (1), який змонтований на другому кінці несучої рами (3), та орієнтувальне обладнання (15) для орієнтування рами із землерийним робочим органом (1) відносно трубопроводу, яке...
Підкопуюче устаткування для зрізання та евакуації грунту з-під трубопроводу
Номер патенту: 49885
Опубліковано: 11.05.2010
Автори: Мусійко Володимир Данилович, Карпенко Олександр Миколайович
МПК: E02F 5/10
Мітки: устаткування, трубопроводу, зрізання, евакуації, підкопуюче, з-під, грунту
Формула / Реферат:
1. Підкопуюче устаткування для зрізання та евакуації ґрунту з-під трубопроводу, яке складається з несучої рами, дискових робочих органів та механізму зміни глибини обробки ґрунту, яке відрізняється тим, що металоконструкція несучої рами має вигляд скобоподібної рами та порожниста у поперечному перерізі прямокутного контуру, а верхня частина скобоподібної рами споряджена замковим пристроєм, а в зоні осі закріплення споряджена шарнірними...
Спосіб визначення деформацій підземного трубопроводу і взаємозв’язку деформацій ґрунту і трубопроводу при підземному вийманні вугілля
Номер патенту: 67494
Опубліковано: 27.02.2012
Автори: Шнеєр Володимир Рафаілович, Сушко Євген Тихонович, Тріфонов Анатолій Володимирович
МПК: G01B 5/00
Мітки: деформацій, спосіб, трубопроводу, вийманні, підземному, взаємозв'язку, ґрунту, визначення, вугілля, підземного
Формула / Реферат:
Спосіб визначення деформацій підземного трубопроводу і взаємозв'язку деформацій ґрунту і трубопроводу при підземному вийманні вугілля, що включає відривання шурфів, що розкривають трубопровід, закладення реперів, який відрізняється тим, що обладнують спеціальну спостережну станцію, котра складається з двох реперів, закріплених на трубопроводі і розташованих на відстані 20-30 м один від одного, порівнянній з відстанню між ґрунтовими реперами,...
Робоче обладнання гідравлічного екскаватора для зрізання оголовків залізобетонних паль
Номер патенту: 42358
Опубліковано: 15.10.2001
Автори: Коробова Раїса Павлівна, Шатов Сергій Василійович, Уріх Євген Йосипович, Хмара Леонід Андрійович, Соколов Ігор Анатолійович
МПК: E02D 5/22
Мітки: оголовків, гідравлічного, екскаватора, залізобетонних, робоче, зрізання, обладнання, паль
Формула / Реферат:
Робоче обладнання гідравлічного екскаватора для зрізання оголовків залізобетонних паль, що містить базову машину, гідромолот , підйомний пристрій, захват, гідроциліндри, яке відрізняється тим, що захват виконаний у вигляді двох металевих Г-подібних скоб - верхньої та нижньої, причому верхня скоба оснащена керованою гідроциліндром паралелограмною вставкою.
Обладнання для закріплення трубопроводу в траншеї

Номер патенту: 71434
Опубліковано: 15.11.2004
Автори: Князь Іван Петрович, Тріфонов Іван Володимирович, Мірошник Микола Іванович, Фоменко Віталій Іванович
МПК: F16L 1/028
Мітки: закріплення, обладнання, трубопроводу, траншеї
Формула / Реферат:
Обладнання для закріплення трубопроводу в траншеї, що містить закріплювальні анкерні пристосування з розміщеними під трубопроводом опорними плитами, тяги, а також зв'язані з ними і накладені на трубопровід силові пояси, яке відрізняється тим, що закріплювальні анкерні пристосування виконані у вигляді буронабивних камуфлетних паль, при цьому обладнання додатково забезпечене котками, закритими ззовні кожухами і розміщеними на опорних плитах,...
Попередній патент: Теплогенератор з ґнотовим пальником і підігрівачем повітря
Наступний патент: Лазерний доплерівський вимірювач швидкості руху метального елемента в каналі ствола
Випадковий патент: Кріогенний наконечник