Регульований радіальний гідростатодинамічний підшипник
Номер патенту: 89288
Опубліковано: 10.04.2014
Автори: Федориненко Дмитро Юрійович, Хабібуліна Анастасія Миколаївна, Сапон Сергій Петрович

Формула / Реферат
Регульований радіальний гідростатодинамічний підшипник, що містить корпус, по бічних поверхнях якого розташовані гайка та фланець, нерухому конічну втулку зі спряженою гідростатичною втулкою, яка включає групи пазів криволінійного профілю, між якими утворені кармани, які підключені через постійні дроселі до джерела стисненої рідини, який відрізняється тим, що кармани мають сферичну форму, а підведення стисненої рідини до них здійснюється через регульовані клапани витрат рідини.
Текст
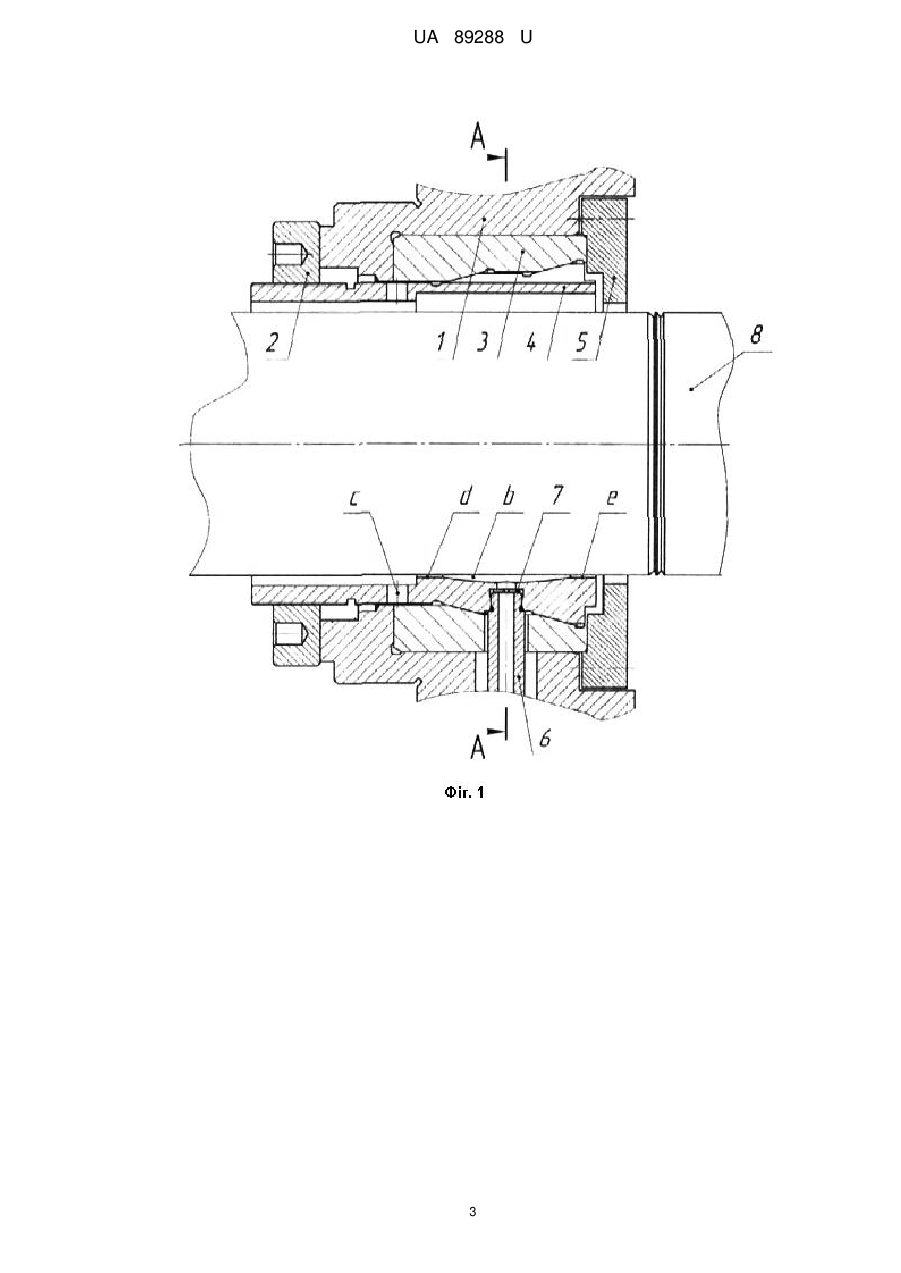
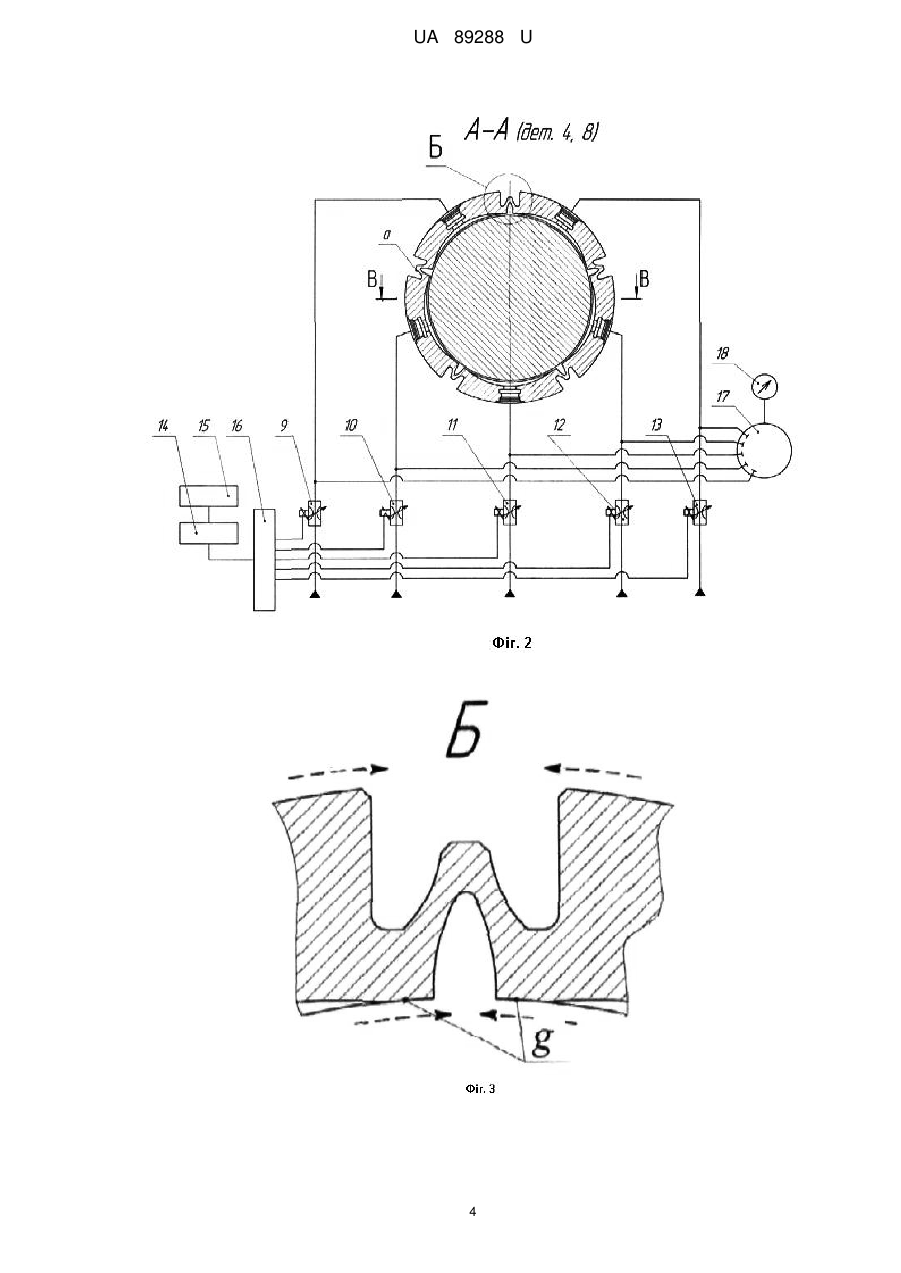
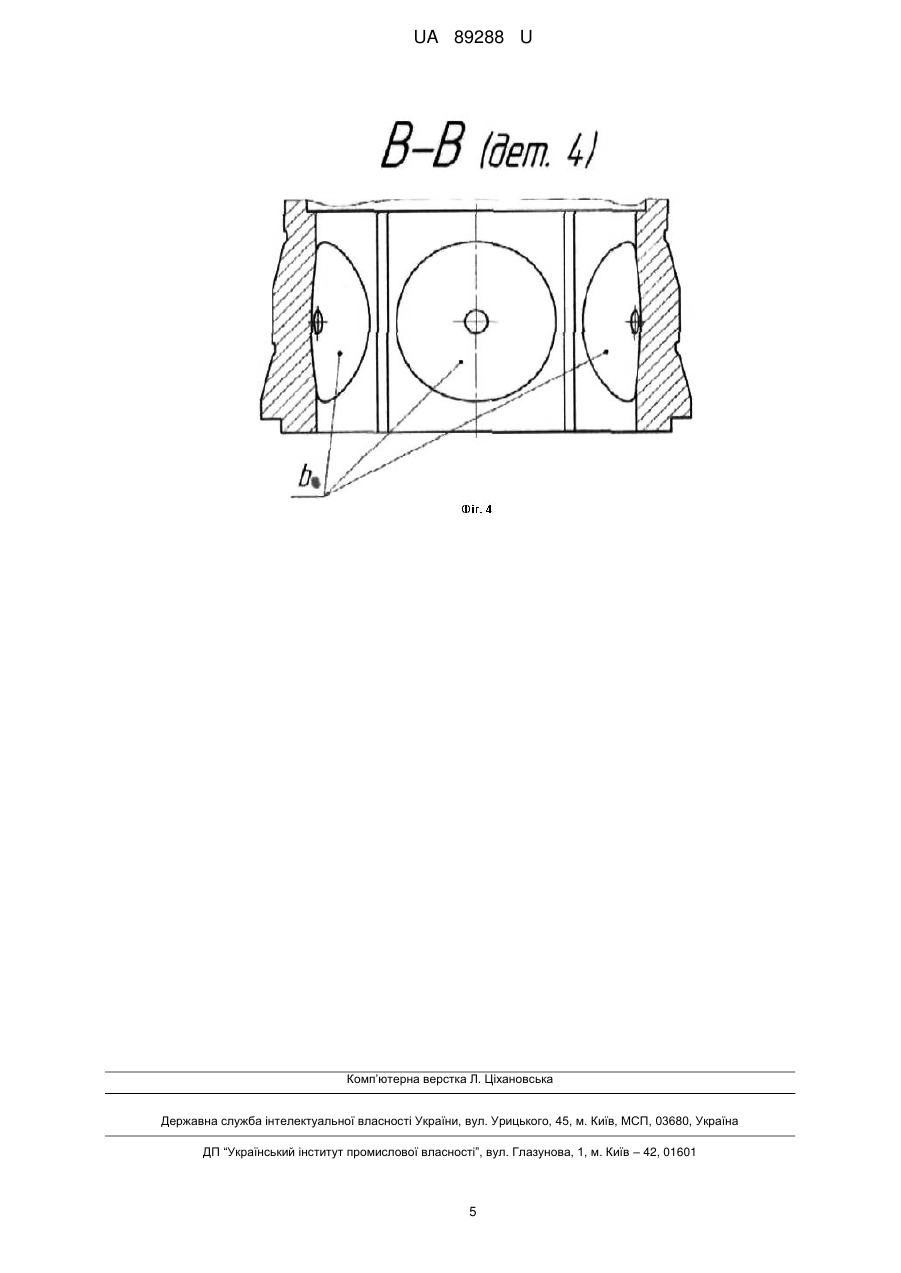
Реферат: UA 89288 U UA 89288 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, а саме до гідростатичних опор ковзання, призначених, для сприймання знакозмінного навантаження. Відома конструкція гідростатичного підшипника [Пат. 82425 UA, МПК F16C27/00, F16C33/04. Спосіб регулювання зазору в гідростатичному підшипнику / Сахно Ю.О., Федориненко Д.Ю., Бойко С.В., Волик B.C.; заявник і патентовласник Чернігівський державний технологічний університет. - № а200607254; заявл. 30.06.2006; опубл. 10.04.2008, Бюл. № 7], за якою гідростатична втулка виконана у вигляді розрізної цанги з кутом нахилу рухомої частини 15°, в кожному пелюстку якої виконані кармани з отворами під штуцери, які мають можливість переміщуватись в радіальному напрямку в межах регулювання зазору і призначені для підведення мастила від насоса. При деформуванні гідростатичної втулки відбувається регулювання радіального зазору з утворенням біля кожного кармана несучого масляного шару. Недоліком даної конструкції опори є наявність лише трьох несучих карманів, що не відповідає умовам максимальної жорсткості підшипника. Окрім того, наявність довгої конічної поверхні обумовлює нерівномірність деформації гідростатичної втулки на опорній довжині підшипника та підвищене тертя. Так, в процесі регулювання радіального зазору, при осьовому переміщенні гідростатичної втулки внаслідок технологічних похибок виготовлення двох довгих спряжених конічних поверхонь виникають додаткові деформації втулки в аксіальному напрямку, що обумовлює нерівномірність радіального зазору. Як прототип прийнято гідростатичний підшипник [Пат. 97685 UA, МПК F16C 32/06. Регульований радіальний гідростатичний підшипник / Струтинський В.Б., Федориненко Д.Ю., Бойко С.В.; заявник і патентовласник Національний технічний університет України "Київський політехнічний інститут". - № а201003534; заявл. 26.03.2010; опубл. 12.03.2012, Бюл. № 5], що містить корпус, по бічних поверхнях якого розташовані гайка та фланець, нерухому конічну втулку зі спряженою гідростатичною втулкою, яка включає групи пазів криволінійного профілю, між якими утворені кармани, які підключені через постійні дроселі до джерела стисненої рідини, причому зазначені пази в кожній групі розташовані в безпосередній близькості один від одного, а сусідні пази виконані почергово на внутрішній та зовнішній поверхнях втулки. На зовнішній поверхні гідростатичної втулки виконані два конічних пояски, які в процесі регулювання радіального зазору взаємодіють з конічними поверхнями нерухомої втулки підшипника. Недоліком даної конструкції підшипника є те, що форма несучих карманів не дозволяє використовувати в повній мірі гідродинамічний ефект для забезпечення несучої спроможності підшипника, тим самим зменшуючи його швидкохідність. В основу корисної моделі поставлена задача удосконалення регульованого радіального гідростатичного підшипника шляхом виконання несучих карманів сферичної форми, до яких підведення стисненої рідини здійснюється через регульовані клапани витрат, що дозволяє забезпечити підвищення швидкохідності підшипника. Поставлена задача вирішується тим, що виконання карманів підшипника сферичної форми дозволяє зменшити втрати потужності, обумовлені стрибкоподібною зміною форми проточної частини опори, що призводить до зменшення втрат потужності на в'язке тертя при збільшенні швидкостей обертання ротора. Застосування регульованих клапанів витрат для живлення підшипника дозволяє при зростанні частоти обертання ротора зменшити подачу робочої рідини до карманів опори, в результаті чого підшипник переходить до гідродинамічного режиму роботи, тим самим зменшуючи втрати потужності як на в'язке тертя, так і на прокачування робочої рідини. Це забезпечує підвищення швидкохідності підшипника. Суть корисної моделі пояснюють креслення. На фіг. 1 показано поздовжній переріз регульованого радіального гідростатодинамічного підшипника. На фіг. 2 - поперечний переріз А-А (деталі 4, 8) на фіг. 1 та фрагмент системи живлення підшипника. На фіг. 3 - вид Б на фіг. 2. На фіг. 4 - поздовжній переріз В-В (деталь 4) на фіг. 2. Базовою деталлю регульованого радіального гідростатодинамічного підшипника є корпус 1 (фіг. 1). В отвір корпуса встановлено з натягом втулку 3 з двома конічними поясками на внутрішній поверхні, які взаємодіють з конічними поясками пружної гідростатичної втулки 4. Гідростатична втулка 4 виконана з системою поздовжніх пазів а (фіг. 2) криволінійного профілю, між якими утворені п'ять карманів b. Також втулка має напрямний поясок та шпонку (на фіг. не показані), що остаточно орієнтують її в корпусі. В осьовому напрямку нерухома втулка 3 зафіксована фланцем 5. На хвостовій частині гідростатичної втулки виконано різь, яка призначена для нагвинчування на неї гайки 2, що упирається в торець корпуса 1 і виконує роль 1 UA 89288 U 5 10 15 20 25 30 35 40 натяжного елемента. В отвори гідростатичної втулки з різзю загвинчено штуцери 6, що мають можливість вільно переміщуватись разом з втулкою в межах регулювання зазору. Для розвантаження опорної частини підшипника від осьових зусиль в різевому з'єднанні на хвостовій частині втулки 4 виконані в тангенціальному напрямку десять наскрізних отворів с (фіг. 1). Система живлення регульованого радіального гідростатодинамічного підшипника розгалужується на п'ять гілок для живлення кожного з карманів b (фіг. 4) гідростатичної втулки 4. В кожній гілці живлення є регульовані клапани витрат 9-13, що попередньо налагоджені на мінімально необхідну пропускну здатність. Швидкість обертання ротора 8 вимірюється енкодером 15, електричні сигнали з якого надходять до аналого-цифрового перетворювача 14, який, в свою чергу, перетворює отриманий аналоговий сигнал на цифровий. Далі цифровий сигнал надходить до мікропроцесорного регулятора 16. Відповідно до отриманого сигналу регулятор 16 визначає за програмою необхідну витрату мастила в кармани b підшипника та надсилає сигнал до регульованих клапанів витрат 9-13, які змінюють свою пропускну здатність пропорційно до вхідного сигналу. Для налагодження та контролю роботи системи живлення призначений багатопозиційний розподільчий золотник 17, що за допомогою манометра 18 дозволяє контролювати тиск в карманах b підшипника. Регульований радіальний гідростатодинамічний підшипник працює наступним чином. Робоча рідина під тиском подається через штуцери 6 і дросельні шайби 7 до карманів b гідростатичної втулки 4, де створюється несучий шар робочої рідини, яка підтримує ротор 8 в певному положенні. Витікання рідини з карманів b відбувається через перемички d, е (фіг. 1) та g (фіг. 3), що відіграють роль дроселюючого елемента та при зміні радіального зазору дозволяють регулювати жорсткість підшипника і витрату рідини. Регулювання величини радіального зазору в підшипнику виконують обертанням гайки 2, яка, упираючись в торець корпуса 1, надає осьове переміщення гідростатичній втулці 4, яка, контактуючи конічними поясками з внутрішніми конічними поверхнями втулки 3, деформується, зменшуючи (збільшуючи) зазор між ротором 8 і перемичками d, е та g пружної гідростатичної втулки 4. Напрямок деформацій повздовжніх пазів гідростатичної втулки при зменшенні радіального зазору в підшипнику показаний пунктирними лініями на фіг. 3. При роботі підшипника в гідростатичному режимі підведення стисненої рідини здійснюється через регульовані клапани витрат 9-13 до п'яти несучих карманів b гідростатичної втулки 4, при цьому регульовані клапани витрат налагодженні на постійну пропускну здатність. При перевищенні швидкості обертання ротора деякого граничного значення, що задається програмою, мікропроцесорний регулятор 16 дає команду на припинення подачі мастила до карманів, що живляться через клапани 9, 10, 12, 13 шляхом перекривання останніх. З метою охолодження робочої рідини при роботі на високих швидкостях мастило через клапан 11 надходить до нижнього кармана підшипника. При цьому підшипник працює в гідродинамічному режимі змащення. При зменшенні швидкостей обертання нижче попередньо встановленого граничного значення регулятор 16 вмикає подачу робочої рідини до всіх карманів гідростатичної втулки, тим самим відновлюючи гідростатичний режим змащення для забезпечення високих показників несучої здатності та радіальної жорсткості при роботі підшипника на низьких частотах обертання ротора. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Регульований радіальний гідростатодинамічний підшипник, що містить корпус, по бічних поверхнях якого розташовані гайка та фланець, нерухому конічну втулку зі спряженою гідростатичною втулкою, яка включає групи пазів криволінійного профілю, між якими утворені кармани, які підключені через постійні дроселі до джерела стисненої рідини, який відрізняється тим, що кармани мають сферичну форму, а підведення стисненої рідини до них здійснюється через регульовані клапани витрат рідини. 2 UA 89288 U 3 UA 89288 U 4 UA 89288 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюFedorynenko Dmytro Yuriiovych
Автори російськоюФедориненко Дмитрий Юрьевич
МПК / Мітки
МПК: F16C 32/06
Мітки: регульованій, гідростатодинамічний, радіальний, підшипник
Код посилання
<a href="https://ua.patents.su/7-89288-regulovanijj-radialnijj-gidrostatodinamichnijj-pidshipnik.html" target="_blank" rel="follow" title="База патентів України">Регульований радіальний гідростатодинамічний підшипник</a>
Регульований радіальний гідростатичний підшипник
Номер патенту: 97685
Опубліковано: 12.03.2012
Автори: Бойко Сергій Васильович, Федориненко Дмитро Юрійович, Струтинський Василь Борисович
МПК: F16C 32/06
Мітки: регульованій, підшипник, гідростатичний, радіальний
Формула / Реферат:
Регульований радіальний гідростатичний підшипник, що містить корпус, по бічних поверхнях якого розташовані гайка та фланець, нерухому конічну втулку зі спряженою гідростатичною втулкою, який відрізняється тим, що деформована гідростатична втулка включає групи пазів криволінійного профілю, між якими утворені кармани, які підключені через постійні дроселі до джерела стисненої рідини, причому зазначені пази в кожній групі розташовані в...
Регульований радіальний гідростатичний підшипник
Номер патенту: 87488
Опубліковано: 10.02.2014
Автори: Бойко Сергій Васильович, Сапон Сергій Петрович, Федориненко Дмитро Юрійович
МПК: F16C 32/06
Мітки: підшипник, гідростатичний, радіальний, регульованій
Формула / Реферат:
1. Регульований радіальний гідростатичний підшипник, що містить корпус, по бічним поверхням якого розташовані натяжна гайка та фланець, нерухому конічну втулку, рухому пружну гідростатичну втулку з різзю на хвостовій частині, криволінійними поздовжніми пазами, між якими утворені кармани та конічними поясками на зовнішній поверхні, які в процесі регулювання радіального зазору взаємодіють з конічними поверхнями нерухомої втулки, забезпечуючи...
Радіальний підшипник ковзання
Номер патенту: 38601
Опубліковано: 15.05.2001
Автори: Гриценко Яків Іванович, Дзятко Сергій Альбертович
МПК: F16C 17/02
Мітки: підшипник, ковзання, радіальний
Формула / Реферат:
(21) 2000074582(54) (57)Дата прийняття рішення15.02.2001 р.Радіальний підшипник ковзання, який має корпус з робочою поверхнею із антифрикційного матеріалу, відрізняється тим, що корпус підшипника виконаний циліндричним з кільцевою маслопідвідною канавкою посередені і масляними карманами, рівномірно розміщеними з обох сторін кільцевої маслопідвідної канавки в шаховому порядку, при цьому вісі карман і в...
Радіальний підшипник ковзання
Номер патенту: 8880
Опубліковано: 15.08.2005
Автори: Ємець Андрій Анатолійович, Щербак Юрій Георгійович, Тарабрін Олександр Іванович
МПК: F16C 17/02
Мітки: ковзання, радіальний, підшипник
Формула / Реферат:
Радіальний підшипник ковзання, який містить корпус із каналами підведення мастила та обертову втулку з пружним елементом, установлену на шийці вала механізму, який відрізняється тим, що в конструкції виконано корпусну втулку з відповідним пружним елементом, причому робочий зазор підшипника утворено внутрішньою поверхнею корпусної втулки та зовнішньою поверхнею обертової втулки, а у відповідних кільцевих проточках втулок установлено згадані...
Регульований гідроаеростатичний підшипник
Номер патенту: 71154
Опубліковано: 10.07.2012
Автори: Струтинський Сергій Васильович, Яхно Олег Михайлович
МПК: F16C 32/06
Мітки: гідроаеростатичний, регульованій, підшипник
Формула / Реферат:
Регульований гідроаеростатичний підшипник, що містить рухому вісь або вал, навколо якого розташовані опори, поверхні яких утворюють з поверхнею осі або вала дросельні щілини гідростатичних або аеростатичних опор, причому дросельні щілини виконані регульованими в залежності від навантаження, що діє на вісь або вал, та мають в своїх центральних частинах центральні кармани, підключені через дроселі до джерела стисненого робочого середовища, а...
Попередній патент: Вихровий гідравлічний діод
Наступний патент: Пристрій для виробництва електричної енергії з відходів спиртових заводів
Випадковий патент: Спосіб оптимізації вирощування цукрової кукурудзи