Мережевий модуль обробки даних з дистанційною реконфігурацією
Номер патенту: 91244
Опубліковано: 12.07.2010
Автори: Турченко Ірина Василівна, Кочан Роман Володимирович, Майків Ігор Мирославович, Кочан Володимир Володимирович
Формула / Реферат
Мережевий модуль обробки даних з дистанційною реконфігурацією програмного забезпечення, в склад якого входять адаптери інтерфейсів зв'язку з сервером розподіленої системи та пристроями нижчого ієрархічного рівня, а також обчислювальний елемент, що складається з мікроконтролера і під'єднаних до нього регістра адреса та оперативного запам’ятовуючого пристрою, вхід запису якого підключений безпосередньо до відповідного виходу мікроконтролера, а вхід читання - до виходу елемента І, входи якого підключені до виходів читання даних і читання команд мікроконтролера, який відрізняється тим, що в склад модуля введено другий обчислювальний елемент, аналогічний першому, і окремий інтерфейсний мікроконтролер, до входів і виходів якого підключено входи і виходи згаданих адаптерів інтерфейсів, входи і виходи послідовних інтерфейсів обох обчислювальних елементів, входи скидання і керування режимом завантаження або виконання робочої програми обох обчислювальних елементів, причому програма завантаження робочої програми розміщена у внутрішній пам'яті програм мікроконтролерів обох обчислювальних елементів.
Текст
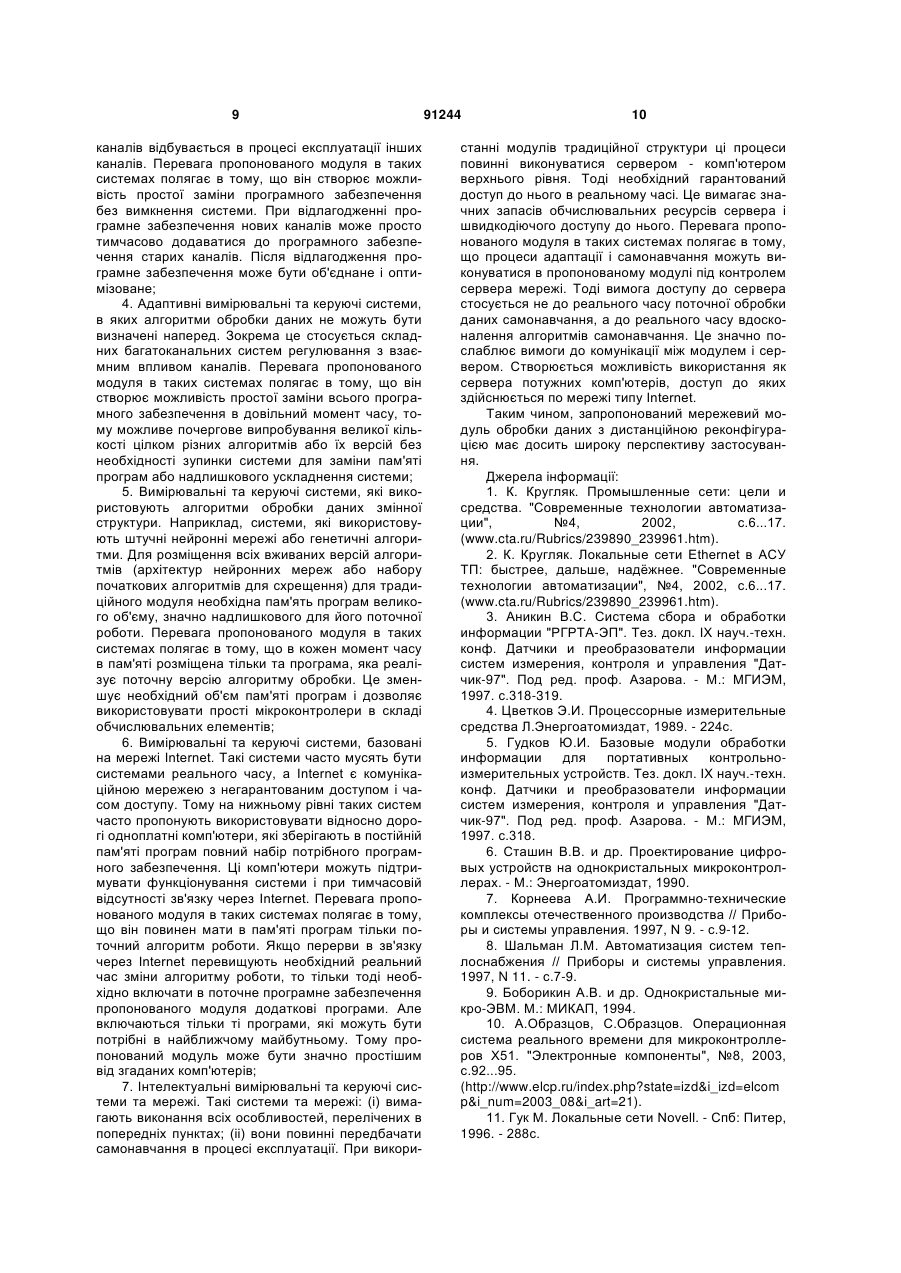
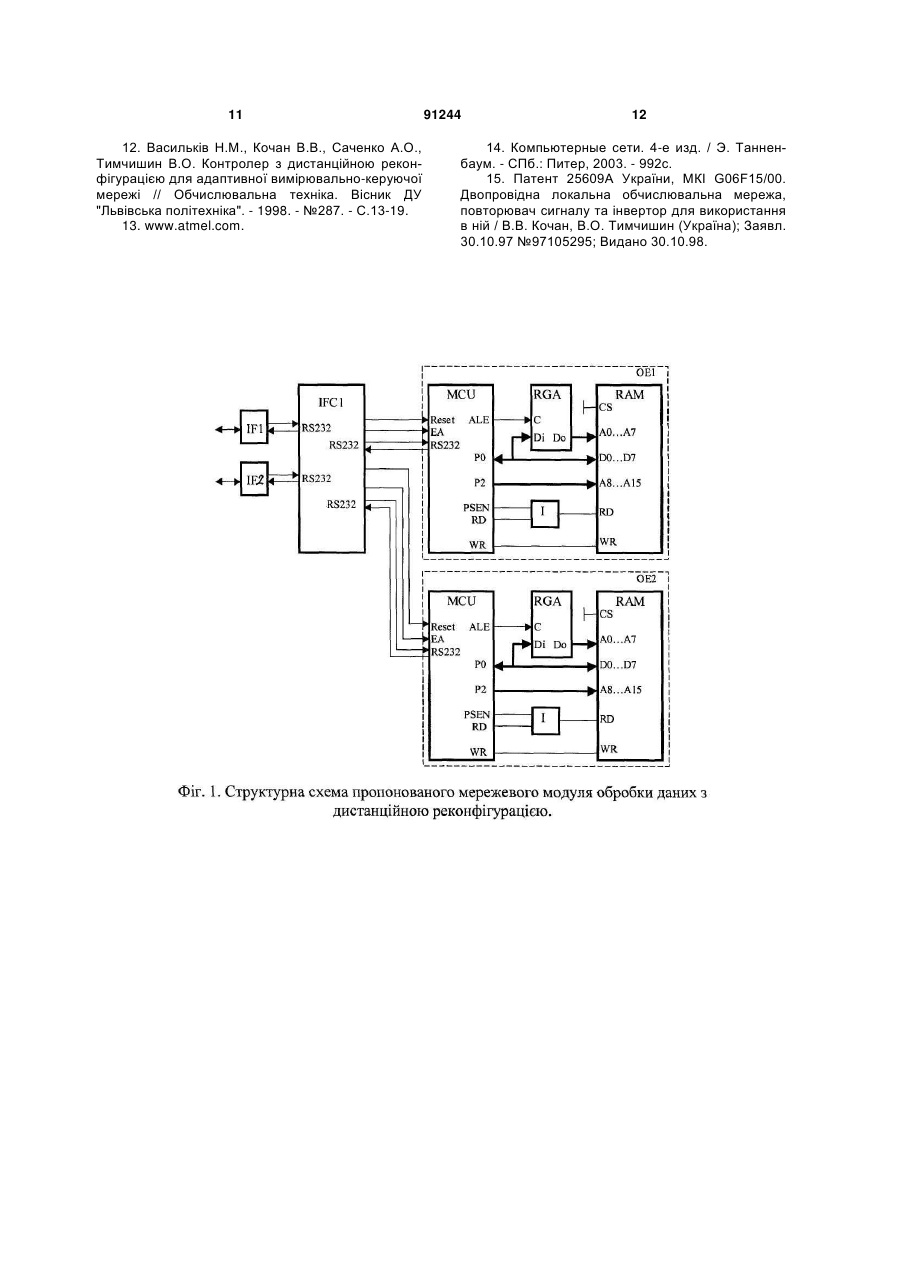
Мережевий модуль обробки даних з дистанційною реконфігурацією програмного забезпечен C2 2 (19) 1 3 Існує багато різних інформаційних технологій, а також технологічних процесів та об'єктів керування, які вимагають частої зміни алгоритмів функціонування, зокрема вимірювання та управління. Для розподілених комп'ютерних систем і мереж це означає потребу заміни (реконфігурації) програмного забезпечення їх периферійних модулів [3...8]. Найчастішим способом є перепрограмування постійного запам'ятовуючого пристрою (ПЗП), де зберігається програма роботи модуля [9], але вона вимагає відключення модуля (і, найчастіше, об'єкта, з яким модуль співпрацює), вилучення ПЗП, його перепрограмування з допомогою спеціального програматора, встановлення в модуль, вмикання та виведення на робочий режим. Таке перепрограмування трудомістке і використовується як крайній захід. Можливе розміщення в постійній пам'яті (ПЗП або на дисковому накопичувані) всього набору можливих варіантів попередньо відлагоджених прикладних програм (ПП) та керуючої системної програми - операційної системи (ОС), яка реалізує алгоритми їх вибору [10]. При цьому реконфігурація ПП може здійснюватись оператором шляхом натисканням кнопок на панелі модуля [5], або дистанційно, з допомогою "інженерної станції" [6], роль якої може виконувати сервер мережі. При цьому в оперативний запам'ятовуючий пристрій (ОЗП) модуля можуть завантажуватись нові значення констант для ПП. Недоліками цього способу є значні надлишкові апаратні затрати: 1. Збільшений об'єм постійної пам'яті через необхідність зберігати увесь набір ПП і ОС; 2. Збільшений об'єм ОЗП через потребу використовувати його частину для роботи ОС; 3. Необхідність значного збільшення продуктивності процесора через використання ОС частини його ресурсів. Крім того, розширення бібліотеки варіантів ПП в процесі експлуатації системи є складним процесом - він відповідає процесу перепрограмування ПЗП, який використовує попередній аналог. Тому цей спосіб доцільно використовувати тільки тоді, коли всі алгоритми і режими роботи модуля відомі до його програмування, їх кількість мала, а процесор має надлишкову продуктивність. Відома також дистанційна реконфігурація розміщених в ОЗП ПП робочих станцій комп'ютерної мережі під час її безперервної роботи [11] з допомогою спеціальної програми - системного завантажувача, розміщеного в ПЗП робочої станції (контролера), яка взаємодіє з сервером мережі, при умові відповідної архітектури робочої станції (типу фон Неймана) із суміщеним адресним простором пам'яті програм і даних. Такі мережі з бездисковими робочими станціями реалізовані на персональних комп'ютерах типу IBM PC (наприклад, Novell Netware з адаптером Ethernet), контролерах з використанням процесорів Z80 та ін. Цей спосіб принципово знижує затрати на зберігання бібліотеки ПП та дозволяє використовувати програми, які з'явилися під час експлуатації мережі за рахунок її адаптації і самонавчання. Але таке рішення не є оптимальним за затратами на реалізацію контролера. Крім того, згаданий спосіб вимагає мо 91244 4 дифікації адресів у завантаженій програмі. Це, поперше значно ускладнює відлагодження ПП на емуляторі, а, по-друге, служить джерелом збоїв через некоректно модифіковані адреси (особливо в програмах, скомпільованих компіляторами різних фірм). Останнє вимагає спеціального відслідковування коректності модифікації адресів і строгої заборони використання абсолютних адресів. Тому при використанні в системах, в яких відлагодження в складі системи є небажаним, описаний спосіб не забезпечує надійної роботи мережі. Прототипом запропонованого пристрою є периферійний мережевий модуль [12] на базі мікроконтролера (однокристальної мікро-ЕОМ), яка має архітектуру фон-Неймана (або таку версію Гарвардської архітектури, яка може бути приведена до архітектури фон-Неймана) та може працювати як з внутрішньою так і зовнішньою пам'яттю програм. Зокрема, можна використати найбільш широко вживані мікроконтролери серії і51 (MCS51) або аналогічні [13]. В традиційну структуру модуля на базі мікроконтролера (мікроконтролер, до якого приєднано, через регістр адресу, ОЗП і системний дешифратор) введено додатковий тригер, вихід якого приєднано до входу формувача імпульсу скидання мікроконтролера і до його контакту, що вказує місце розміщення програми, яка має виконуватися (внутрішня чи зовнішня пам'ять). До другого входу формувача імпульсу скидання мікроконтролера підключено давач напруги живлення схеми. Входи додаткового тригера підключено до виходів давача напруги живлення схеми і системного дешифратора. Якщо використано мікроконтролери серії і51 необхідно привести їх до Гарвардської архітектури. Для цього їх виходи RD (читання ОЗП) і PSEN (читання пам'яті програм) підключають до входів елемента І, вихід якого підключають до входу RD ОЗП. Після вмикання периферійного модуля давач напруги живлення діє на входи тригера і формувача імпульсу скидання мікроконтролера, скидаючи тригер і мікроконтролер в початковий стан. При цьому тригер вказує мікроконтролеру на необхідність виконання програми, розміщеної у внутрішній пам'яті (ПЗП). Виконуючи цю програму, мікроконтролер посилає серверу мережі запит на завантаження ПП. Сервер передає виконуваний код ПП модулю, мікроконтролер якого, під керуванням програми, розміщеної в ПЗП, записує цей код у зовнішній ОЗП. Після кінця запису виконуваного коду ПП мікроконтролер звертається до адреси, яка системним дешифратором розшифровується як команда перекидання додаткового тригера. Останній вказує мікроконтролеру на необхідність виконання програми, розміщеної у зовнішньому ОЗП і, через формувач імпульсу скидання мікроконтролера, скидає його. Мікроконтролер починає виконувати завантажену ПП. Перевагами прототипу є можливість використання ПП всіх ресурсів мікроконтролера та виконання ПП "як є" (відсутність будь яких змін в ній, внесених при завантаженні). Першим недоліком прототипу є непрацездатність модуля під час завантаження виконуваної ПП. Цей недолік не є значним при завантаженні ПП після ввімкнення живлення, однак, якщо заміну ПП проводять в 5 процесі експлуатації системи керування, можливі аварійні стани за рахунок втрати керування об'єктом. Це обмежує область використання прототипу системами, що керують об'єктами, які можуть на час заміни ПП бути переведеними в безпечний режим. Другим недоліком є низька стійкість проти помилок в завантаженій ПП, внесених як завадами в каналі зв'язку, так і при написанні ПП. Якщо під дією помилок ПП зависла, або в частині ПП, яка забезпечує дистанційне перепрограмування, є помилка, заміна ПП стає неможливою без скидання мікроконтролера шляхом вимкнення і повторного ввімкнення модуля. Крім того, якщо канал зв'язку під час перепрограмування буде пошкоджено, модуль залишиться непрацездатним і для відновлення його працездатності необхідно знову провести скидання мікроконтролера шляхом вимкнення і повторного ввімкнення модуля. Метою винаходу є підвищення надійності роботи периферійного модуля за рахунок забезпечення, по-перше, можливості гарантованого дистанційного перепрограмування і, по-друге, функціонування при пошкодженні каналу зв'язку під час перепрограмування. Суть пропонованого винаходу полягає в тому, що в мережевий модуль обробки даних з дистанційною реконфігурацією програмного забезпечення, в склад якого входять адаптери інтерфейсів зв'язку з сервером розподіленої системи та пристроями нижчого ієрархічного рівня, а також обчислювальний елемент, що складається з мікроконтролера і під'єднаних до нього регістра адресу та оперативного запам'ятовуючого пристрою, вхід запису якого підключений безпосередньо до відповідного виходу мікроконтролера, а вхід читання до виходу елемента І, входи якого підключені до виходів читання даних і читання команд мікроконтролера, введено окремий інтерфейсний мікроконтролер і другий обчислювальний елемент, аналогічний першому. При цьому входи скидання та входи, що вказують місце розміщення програми, яка має виконуватися (внутрішня чи зовнішня пам'ять), а також входи та виходи послідовних інтерфейсів обох обчислювальних елементів під'єднані до відповідних виводів інтерфейсного мікроконтролера, до якого також під'єднані входи і виходи адаптерів інтерфейсів. Центральним елементом модуля є інтерфейсний контролер, який керує обчислювальними елементами і забезпечує зв'язок з іншими ієрархічними рівнями системи (мережі). Поточну обробку даних виконує один з двох обчислювальних елементів, інший зазвичай знаходиться в стані скидання. Після включення живлення інтерфейсний контролер посилає серверу запит на завантаження ПП. При цьому він переводить, використовуючи свої виходи, підключені до виходів скидання та входів, що вказують місце розміщення програми, яка має виконуватися, один з обчислювальних елементів (наприклад, перший) в стан скидання, а інший (наприклад, другий) - в стан виконання програми, розміщеної у внутрішньому ПЗП. Сервер передає виконуваний код ПП модулю. Його приймає інтерфейсний мікроконтролер і передає другому обчислювальному елементу, мікроконтролер 91244 6 якого виконує програму, розміщену в ПЗП. Згідно цієї програми, останній записує цей код у зовнішній ОЗП. Після кінця запису коду ПП інтерфейсний мікроконтролер переводить мікроконтролер другого обчислювального елемента в стан виконання програми, розміщеної в ОЗП, і скидає його. Другий обчислювальний елемент починає поточну обробку даних, перший продовжує знаходитися в стані скидання. При необхідності заміни виконуваної ПП сервер посилає відповідну команду, яка розшифровується інтерфейсним мікроконтролером. Він переводить перший обчислювальний елемент, який досі був у стані скидання, у стан виконання програми, розміщеної в ПЗП. Надалі інтерфейсний мікроконтролер взаємодіє як з першим (працюючим) обчислювальним елементом (який продовжує обмін даними з сервером і модулями нижчих ієрархічних рівнів та обробку поточних даних), так і з введеним в дію другим обчислювальним елементом, якому передає код нової ПП, що поступає з сервера. Захист від можливих колізій виконується відомими способами [14]. Після закінчення процесу завантаження програми та її перевірки (наприклад, шляхом підрахунку контрольної суми), інтерфейсний мікроконтролер переводить другий обчислювальний елемент в стан скидання, а перший обчислювальний елемент переводить в стан виконання програми, розміщеної в ОЗП і скидає його. Після цього поточну обробку даних і обмін даними з сервером і модулями нижчих ієрархічних рівнів починає перший обчислювальний елемент, другий знаходиться в стані скидання. Як видно, під час заміни ПП (завантаження нової ПП) периферійний модуль (його другий обчислювальний елемент) продовжує виконання старої ПП. Розпізнавання команди сервера на заміну виконуваної ПП здійснює інтерфейсний мікроконтролер, який має стале, відлагоджене і протестоване програмне забезпечення, робота якого ніяк не залежить від помилок в завантаженій ПП, зависань обчислювальних елементів та ін. Таким чином, мета винаходу - підвищення надійності перепрограмування периферійного модуля і його функціонування під час перепрограмування - досягається за рахунок пропонованої структури і розподілу функціональних обов'язків складових частин. Вилучення будь якої складової частини, введеної в склад прототипу, або перерозподіл їх функціональних обов'язків не дозволяє досягнути мету винаходу. Суть винаходу пояснюють зображена на Фіг.1 структурна схема пропонованого мережевого модуля обробки даних і зображені на Фіг.2 схеми передачі керування між обчислювальними елементами та інтерфейсним мікроконтролером. Мережевий модуль обробки даних, структурна схема якого зображена на Фіг.1, складається з двох обчислювальних елементів ОЕ1 і ОЕ2, інтерфейсного мікроконтролера IFC та адаптерів інтерфейсів верхнього і нижнього рівнів мережі IF1 і IF2. Кожен обчислювальний елемент складається з мікроконтролера MCU, регістра адресу RGA, оперативного запам'ятовуючого пристрою RAM та логічного елемента І. Модуль, представлений на Фіг.1, для прикладу, побудований на базі мікроконтролерів 89С52, які зараз найпопулярніші. В цих 7 мікроконтролерах порт Р0, при наявності логічної одиниці на виході ALE, виконує роль шини молодших адресів, а при наявності логічного нуля - шини даних. Тому порт Р0 підключений до входу регістра RGA, куди записуються молодші адреси при наявності логічної одиниці на виході ALE, і до входів-виходів даних оперативної пам'яті RAM. Порт Р2 виконує роль шини старших адресів, він безпосередньо підключений до відповідних входів оперативної пам'яті RAM. Сигнал запису WR даних в оперативну пам'ять RAM також безпосередньо підключений до відповідного її входу. А сигнали читання команд PSEN і даних RD об'єднані з допомогою логічного елемента І, чим досягається приведення Гарвардської архітектури мікроконтролерів 89С52 в архітектуру фон-Неймана. Інтерфейсний мікроконтролер IFC теж, для прикладу, виконаний на базі мікроконтролера 89С52. Він керує обчислювальними елементами ОЕ1 і ОЕ2 через їх вхід скидання Reset і вхід ЕА, що вказує місце розміщення програми, яка має виконуватися (внутрішня чи зовнішня пам'ять). Для прикладу, прийнято, що всі послідовні інтерфейси в модулі та в системі є одного типу - RS232. Однак мікроконтролери 89С52 мають тільки один вбудований апаратний інтерфейс цього типу. Його найдоцільніше використати як інтерфейс мережі верхнього рівня, виконавши підключений до неї адаптер (наприклад, IF1) відповідним чином [15]. Решту інтерфейсів доцільно реалізувати програмно. Після включення живлення IFC через IF1 посилає серверу запит на завантаження ПП і подає на входи Reset і ЕА ОЕ1 та ОЕ2 логічні одиниці (скидає MCU обох обчислювальних елементів). Далі на вхід Reset OE2 подається логічний нуль і його MCU починає виконання програми, записаної у його внутрішній ПЗП. Сервер передає виконуваний код ПП, який приймає IFC і передає MCU OE2, який, згідно програми, розміщеної в його ПЗП, записує цей код у RAM OE2. Після передачі всього коду ПП MCU ОЕ2 перевіряє правильність записаних кодів (наприклад, шляхом підрахунку контрольної суми ПП і порівняння її з переданою з сервера) і видає IFC або сигнал підтвердження правильності ПП, або сигнал збою. При отриманні сигналу збою IFC повторно скидає MCU OE2 і посилає серверу запит на повторну передачу коду ПП. При отриманні сигналу підтвердження IFC подає на вхід Ε Α ΟΕ2 логічний нуль і повторно скидає MCU OE2. Після скидання MCU OE2 починає виконання завантаженої ПП, розміщеної в RAM OE2. При цьому ПП може повністю використовувати всі ресурси MCU OE2 і ніяка модифікація адресів непотрібна. ОЕ1 залишається у стані скидання. Для заміни ПП сервер посилає команду, яку розшифровує IFC. IFC подає на вхід Reset MCU OE1 логічний нуль, тобто закінчує стан скидання. MCU OE1 виконує програму, записану у його внутрішній ПЗП (яка аналогічна програмі ОЕ2). Запис коду ПП у RAM OE1 відбувається аналогічно, як і у RAM OE2. Але IFC при цьому як передає від сервера до ОЕ1 код ПП, так і проводить обмін даними між MCU OE2 (що продовжує виконувати стару ПП) та сервером і модулями нижчого ієрархічного 91244 8 рівня. Після завантаження ПП у RAM OE1 та підтвердження її контрольної суми IFC подає логічний нуль на вхід Reset MCU OE2 (скидає MCU OE2) і на вхід ЕА MCU OE1 (режим виконання ПП, завантаженої в RAM OE1). На вхід Reset MCU OE1 подається імпульс логічної одиниці (скидання) і ОЕ1 починає обробку поточних даних. Пропонована структура модуля є ієрархічною, зі зміною підпорядкування в процесі роботи. Підпорядкування в ній пояснює Фіг.2. Під час завантаження ПП після ввімкнення живлення IFC щодо ОЕ1 і ОЕ2 є Master, ОЕ1 і ОЕ2 щодо IFC Slave (див. Фіг.2а). Під час роботи IFC є Master щодо ОЕ1 і щодо режиму роботи ОЕ2, а щодо виконання ПП, то ОЕ2 є Master, a IFC є Slave (див. Фіг.2б). Під час заміни ПП IFC залишається Master щодо ОЕ1 і щодо режиму роботи ОЕ2, і Slave щодо виконання ПП ОЕ2 (див. Фіг.2б). Після завантаження ПП і скидання ОЕ1, IFC стає Master щодо ОЕ2 (утримує ОЕ2 в стані скидання) і щодо режиму роботи ОЕ1, і Slave щодо виконання ПП ОЕ1 (див. Фіг.2в). Таким чином, як видно з Фіг.2, IFC завжди є Master щодо режиму роботи ОЕ1 і ОЕ2, тому може в будь який момент, незалежно від стану ОЕ1, ОЕ2, ПП, провести перепрограмування модуля, тобто заміну його ПП. Використання запропонованого технічного рішення дозволяє, при незначних затратах, реалізувати мережевий модуль обробки даних з дистанційною реконфігурацією (заміною) програми його роботи в процесі експлуатації, без необхідності зупинки обробки даних, вимикання, використання програматорів. При цьому забезпечена висока надійність роботи модуля за рахунок гарантованого дистанційного перепрограмування в довільний момент і продовження функціонування по старій програмі при пошкодженні каналу зв'язку під час перепрограмування. Це дає змогу реалізувати гнучкі мережі вимірювально-керуючих модулів для застосувань в наступних системах: 1. Універсальні системи, де пропонований мережевий модуль взаємодіє з різноманітним існуючим і розробленим в процесі експлуатації обладнанням. Наприклад, системи, які поступово, в процесі експлуатації на протязі довгого часу, нарощуються і модернізуються. Перевага пропонованого модуля в таких системах полягає в тому, що він дає можливість простої заміни і нарощення програмного забезпечення; 2. Розподілені вимірювальні та керуючі системи, в яких часто змінюється периферійне обладнання. Наприклад, розподілені системи, які на різних етапах експлуатації повинні виконувати різні задачі. Зокрема, розподілені системи екологічного моніторінгу, обладнання яких залежить від виду оцінюваного забруднення. Перевага пропонованого модуля в таких системах полягає в тому, що (і) пропонований модуль різко збільшує вагу незмінного апаратного обладнання; (іі) можливість простої заміни алгоритмів обробки даних полегшує заміну обладнання "на ходу"; 3. Адаптивні вимірювальні та керуючі системи з динамічною заміною алгоритмів обробки даних без переривання роботи. Наприклад, системи, в яких відлагодження і оптимізація роботи одних 9 каналів відбувається в процесі експлуатації інших каналів. Перевага пропонованого модуля в таких системах полягає в тому, що він створює можливість простої заміни програмного забезпечення без вимкнення системи. При відлагодженні програмне забезпечення нових каналів може просто тимчасово додаватися до програмного забезпечення старих каналів. Після відлагодження програмне забезпечення може бути об'єднане і оптимізоване; 4. Адаптивні вимірювальні та керуючі системи, в яких алгоритми обробки даних не можуть бути визначені наперед. Зокрема це стосується складних багатоканальних систем регулювання з взаємним впливом каналів. Перевага пропонованого модуля в таких системах полягає в тому, що він створює можливість простої заміни всього програмного забезпечення в довільний момент часу, тому можливе почергове випробування великої кількості цілком різних алгоритмів або їх версій без необхідності зупинки системи для заміни пам'яті програм або надлишкового ускладнення системи; 5. Вимірювальні та керуючі системи, які використовують алгоритми обробки даних змінної структури. Наприклад, системи, які використовують штучні нейронні мережі або генетичні алгоритми. Для розміщення всіх вживаних версій алгоритмів (архітектур нейронних мереж або набору початкових алгоритмів для схрещення) для традиційного модуля необхідна пам'ять програм великого об'єму, значно надлишкового для його поточної роботи. Перевага пропонованого модуля в таких системах полягає в тому, що в кожен момент часу в пам'яті розміщена тільки та програма, яка реалізує поточну версію алгоритму обробки. Це зменшує необхідний об'єм пам'яті програм і дозволяє використовувати прості мікроконтролери в складі обчислювальних елементів; 6. Вимірювальні та керуючі системи, базовані на мережі Internet. Такі системи часто мусять бути системами реального часу, a Internet є комунікаційною мережею з негарантованим доступом і часом доступу. Тому на нижньому рівні таких систем часто пропонують використовувати відносно дорогі одноплатні комп'ютери, які зберігають в постійній пам'яті програм повний набір потрібного програмного забезпечення. Ці комп'ютери можуть підтримувати функціонування системи і при тимчасовій відсутності зв'язку через Internet. Перевага пропонованого модуля в таких системах полягає в тому, що він повинен мати в пам'яті програм тільки поточний алгоритм роботи. Якщо перерви в зв'язку через Internet перевищують необхідний реальний час зміни алгоритму роботи, то тільки тоді необхідно включати в поточне програмне забезпечення пропонованого модуля додаткові програми. Але включаються тільки ті програми, які можуть бути потрібні в найближчому майбутньому. Тому пропонований модуль може бути значно простішим від згаданих комп'ютерів; 7. Інтелектуальні вимірювальні та керуючі системи та мережі. Такі системи та мережі: (і) вимагають виконання всіх особливостей, перелічених в попередніх пунктах; (іі) вони повинні передбачати самонавчання в процесі експлуатації. При викори 91244 10 станні модулів традиційної структури ці процеси повинні виконуватися сервером - комп'ютером верхнього рівня. Тоді необхідний гарантований доступ до нього в реальному часі. Це вимагає значних запасів обчислювальних ресурсів сервера і швидкодіючого доступу до нього. Перевага пропонованого модуля в таких системах полягає в тому, що процеси адаптації і самонавчання можуть виконуватися в пропонованому модулі під контролем сервера мережі. Тоді вимога доступу до сервера стосується не до реального часу поточної обробки даних самонавчання, а до реального часу вдосконалення алгоритмів самонавчання. Це значно послаблює вимоги до комунікації між модулем і сервером. Створюється можливість використання як сервера потужних комп'ютерів, доступ до яких здійснюється по мережі типу Internet. Таким чином, запропонований мережевий модуль обробки даних з дистанційною реконфігурацією має досить широку перспективу застосування. Джерела інформації: 1. К. Кругляк. Промышленные сети: цели и средства. "Современные технологии автоматизации", №4, 2002, с.6...17. (www.cta.ru/Rubrics/239890_239961.htm). 2. К. Кругляк. Локальные сети Ethernet в АСУ ТП: быстрее, дальше, надѐжнее. "Современные технологии автоматизации", №4, 2002, с.6...17. (www.cta.ru/Rubrics/239890_239961.htm). 3. Аникин B.C. Система сбора и обработки информации "РГРТА-ЭП". Тез. докл. IX науч.-техн. конф. Датчики и преобразователи информации систем измерения, контроля и управления "Датчик-97". Под ред. проф. Азарова. - М.: МГИЭМ, 1997. с.318-319. 4. Цветков Э.И. Процессорные измерительные средства Л.Энергоатомиздат, 1989. - 224с. 5. Гудков Ю.И. Базовые модули обработки информации для портативных контрольноизмерительных устройств. Тез. докл. IX науч.-техн. конф. Датчики и преобразователи информации систем измерения, контроля и управления "Датчик-97". Под ред. проф. Азарова. - М.: МГИЭМ, 1997. с.318. 6. Сташин В.В. и др. Проектирование цифровых устройств на однокристальных микроконтроллерах. - М.: Энергоатомиздат, 1990. 7. Корнеева А.И. Программно-технические комплексы отечественного производства // Приборы и системы управления. 1997, N 9. - с.9-12. 8. Шальман Л.М. Автоматизация систем теплоснабжения // Приборы и системы управления. 1997, N 11. - с.7-9. 9. Боборикин А.В. и др. Однокристальные микро-ЭВМ. М.: МИКАП, 1994. 10. А.Образцов, С.Образцов. Операционная система реального времени для микроконтроллеров Х51. "Электронные компоненты", №8, 2003, с.92...95. (http://www.elcp.ru/index.php?state=izd&i_izd=elcom p&i_num=2003_08&i_art=21). 11. Гук Μ. Локальные сети Novell. - Спб: Питер, 1996. - 288с. 11 12. Васильків Н.М., Кочан В.В., Саченко А.О., Тимчишин В.О. Контролер з дистанційною реконфігурацією для адаптивної вимірювально-керуючої мережі // Обчислювальна техніка. Вісник ДУ "Львівська політехніка". - 1998. - №287. - С.13-19. 13. www.atmel.com. 91244 12 14. Компьютерные сети. 4-е изд. / Э. Танненбаум. - СПб.: Питер, 2003. - 992с. 15. Патент 25609А України, МКІ G06F15/00. Двопровідна локальна обчислювальна мережа, повторювач сигналу та інвертор для використання в ній / В.В. Кочан, В.О. Тимчишин (Україна); Заявл. 30.10.97 №97105295; Видано 30.10.98. 13 Комп’ютерна верстка А. Рябко 91244 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюData manipulation network module with software remote reconfiguration
Автори англійськоюMaikiv Ihor Myroslavovych, Kochan Roman Volodymyrovych, Turchenko Iryna Vasylivna, Kochan Volodymyr Volodymyrovych
Назва патенту російськоюСетевой модуль обработки данных с дистанционной реконфигурацией
Автори російськоюМайкив Игорь Мирославович, Кочан Роман Владимирович, Турченко Ирина Васильевна, Кочан Владимир Владимирович
МПК / Мітки
МПК: H04L 12/24, G06F 7/00, G06F 9/06, G06F 15/76
Мітки: модуль, обробки, дистанційною, даних, мережевий, реконфігурацією
Код посилання
<a href="https://ua.patents.su/7-91244-merezhevijj-modul-obrobki-danikh-z-distancijjnoyu-rekonfiguraciehyu.html" target="_blank" rel="follow" title="База патентів України">Мережевий модуль обробки даних з дистанційною реконфігурацією</a>
Спосіб забезпечення захищеного передавання цифрових даних (варіанти), пристрій (варіанти), захисний модуль (варіанти) і система для його здійснення
Номер патенту: 66921
Опубліковано: 15.06.2004
Автори: Лепоріні Давід, Майяр Мішель, Дюбланше Фредерік, Дювуа Жан-Люк
МПК: H04N 5/913
Мітки: варіанти, пристрій, передавання, модуль, забезпечення, цифрових, спосіб, захисний, система, здійснення, захищеного, даних
Формула / Реферат:
1. Спосіб забезпечення захищеного передавання цифрових даних між пристроями, який включає операції передавання від одного пристрою в автономний захисний модуль ідентифікатора пристрою і перевірки повноважності пристрою, в залежності від значення переданого ідентифікатора.2. Спосіб за п. 1, який відрізняється тим, що захисний модуль виконує перевірку повноважності пристрою шляхом порівняння переданого ідентифікатора з щонайменше одним...
Модуль ідентифікації абонента та спосіб виконання передачі даних
Номер патенту: 90268
Опубліковано: 26.04.2010
Автори: Нолл Джозеф, Келвет Жуан Карлос Лопез
МПК: H04W 92/00, G06K 7/00
Мітки: даних, спосіб, передачі, ідентифікації, виконання, абонента, модуль
Формула / Реферат:
1. Модуль ідентифікації абонента для термінала мобільного зв'язку, що включає пристрій обробки, пристрій пам'яті, пристрій введення/виведення та пристрій радіозв'язку, з'єднаний з антеною, вбудованою в зазначений модуль ідентифікації абонента, який відрізняється тим, що зазначений пристрій радіозв'язку є опитуваним приймачем-передавачем, оперативно керованим зазначеним пристроєм обробки та виконаним з можливістю оперативного увімкнення та...
Відбитковий спосіб обробки даних для ідентифікації класів даних
Номер патенту: 64956
Опубліковано: 15.03.2004
Автори: Манухін Олександр Васильович, Шелест Михайло Євгенович
МПК: G06F 15/18, G06K 9/64
Мітки: спосіб, класів, даних, ідентифікації, обробки, відбитковий
Формула / Реферат:
Відбитковий спосіб обробки даних для ідентифікації класів даних, згідно з яким, кожному класу інформаційного потоку (протоколу транспортування файлів, формату файлів, текстів мовних груп, текстів предметних галузей) будується шаблон відбитку потоку, який відрізняється тим, що він формується з урахуванням повторюваності його елементарних одиниць у зваженому Евклідовому просторі полярної системи координат, для чого визначають вибірку окремого...
Спосіб шифрування даних для систем обробки в еом

Номер патенту: 38795
Опубліковано: 26.01.2009
Автори: Дмитришин Олександр Васильович, Лужецький Володимир Андрійович
МПК: H04L 9/06
Мітки: систем, еом, обробки, даних, спосіб, шифрування
Формула / Реферат:
Спосіб шифрування даних для систем обробки в ЕОМ, який полягає в тому, що послідовність двійкових символів відкритого тексту розбивають на n-бітні блоки, кожний з яких послідовно розміщують в накопичувачі, зашифрування яких складається з чотирьох циклів, при цьому дані ri-1 з виходу (і-1)-го накопичувача тексту і дані відповідного підключа Кi з виходу і-го накопичувача секретного ключа кожного циклу надходять на вхід циклової функції...
Система обробки даних при страхуванні
Номер патенту: 22174
Опубліковано: 25.04.2007
Автор: Онищенко Людмила Андріївна
МПК: G06Q 50/00, G06F 17/40
Мітки: обробки, система, страхуванні, даних
Формула / Реферат:
1. Система обробки даних при страхуванні, що включає принаймні одну автоматизовану підсистему надання страхових послуг, оснащену каналом або каналами зв'язку, причому кожна автоматизована підсистема надання страхових послуг включає комплекс технічних засобів для випуску в обіг юридичних документів у вигляді бланків договорів страхування на паперових носіях, комплекс технічних засобів для укладання договорів з внесенням коштів на користь...
Попередній патент: Металева основа з покриттям на основі епоксидної смоли, спосіб нанесення покриття, система двошарового покриття та застосування
Наступний патент: Цифровий вимірювач вологості зерна та інших сипких матеріалів
Випадковий патент: Спосіб виробництва металургійних брикетів на цементному сполучному