Спосіб визначення геометричних характеристик і параметрів руху наземних об’єктів при геомоніторингу і система для його реалізації
Номер патенту: 91299
Опубліковано: 12.07.2010
Автори: Зубков Анатолій Миколайович, Лазько Леонід Вікторович, Прудиус Іван Никифорович, Мимріков Дмитро Олександрович


Формула / Реферат
1. Спосіб визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, за яким аналізують тепловий в інфрачервоному діапазоні довжин хвиль і радіолокаційний в міліметровому діапазоні довжин хвиль взаємоконтрасти об'єкта спостереження та фону шляхом механічного переміщення плоского дзеркала, розміщеного в паралельному пучку променів, сформованому параболічною антеною, роздільно фокусують теплове випромінювання об'єкта спостереження за допомогою приймача інфрачервоного діапазону та ехо-сигнал об'єкта спостереження в опромінювачі міліметрового діапазону за рахунок поляризаційної селекції сигналів радіолокаційного каналу у двох друкованих поляризаційних фільтрах та стробують вихідний сигнал приймача теплового випромінювання імпульсами, часове положення яких визначається наявністю ехо-сигналів від об'єкта спостереження на виході радіолокаційного каналу, який відрізняється тим, що взаємопогоджено в просторі та взаємосинхронно в часі відносно об'єкта спостереження формують на виході інфрачервоного каналу кутові "портрети" в координатах "азимут-кут місця", а на виході радіолокаційного каналу почергово в режимах багаточастотного і одночастотного зондування формують дальнісні "портрети" об'єкта спостереження з одночасною оцінкою його доплерівських характеристик.
2. Система визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, яка складається з плоского скануючого дзеркала механічно з'єднаного з керованим електроприводом, фокусуючого параболічного дзеркала з приймачем теплового випромінювання і опромінювачем міліметрового діапазону довжин хвиль, відповідно розміщеними у фокусі і геометричному центрі фокусуючого дзеркала, першого і другого друкованих поляризаційних фільтрів сформованих на оптично прозорих підкладках гіперболічної і параболічної форми, відповідно, та розміщених між приймачем теплового випромінювання і опромінювачем, причому параболічна підкладка з поляризаційним фільтром встановлена на поверхні фокусуючого дзеркала, α також блока обробки, керування і синхронізації, перший вихід якого підключений до входу керованого електроприводу плоского скануючого дзеркала, а другий вихід і другий вхід - до приймача теплового випромінювання, яка відрізняється тим, що додатково містить когерентно-імпульсну РЛС міліметрового діапазону із спектральним скануванням зондуючого сигналу, яка з'єднана з приймачем теплового випромінювання та з блоком обробки, керування і синхронізації.
3. Система за п. 2, яка відрізняється тим, що когерентно-імпульсна РЛС міліметрового діапазону зі спектральним скануванням зондуючого сигналу містить передавальний пристрій, який через циркулятор розв'язки "прийом-передача" підключений до випромінювача, перший змішувач, який через циркулятор розв'язки "прийом-передача" підключений до виходу випромінювача, керований синтезатор частот з черезперіодним перестроюванням частоти, керуючий вхід якого підключений до першого виходу блока керування і синхронізації, вхід якого підключений до блока обробки, керування та синхронізації, вихід першого гетеродину підключений до гетеродинного входу першого змішувача, вихід якого через перший підсилювач проміжної частоти підключений до сигнального входу другого змішувача, до гетеродинного входу якого підключений керований фазоповертач, вихід другого змішувача через другий підсилювач проміжної частоти підключений до перших входів першого і другого фазових детекторів, до других входів яких підключений четвертий вихід керованого синтезатора частот, причому до другого входу першого фазового детектора через фазоповертач на 90°, а до другого входу другого фазового детектора безпосередньо, другий, третій і четвертий виходи блока керування і синхронізації підключені до другого входу передавального пристрою, керуючого входу керованого фазоповертача і першого входу блока формування дальнісного "портрета" та оцінки доплерівської частоти об'єкта спостереження, вихід якого підключений до блока обробки, керування та синхронізації, а другий вхід якого через аналого-цифровий перетворювач підключений до виходів першого і другого фазових детекторів, п'ятий вихід блока керування і синхронізації підключений до керуючого входу другого підсилювача проміжної частоти.
Текст
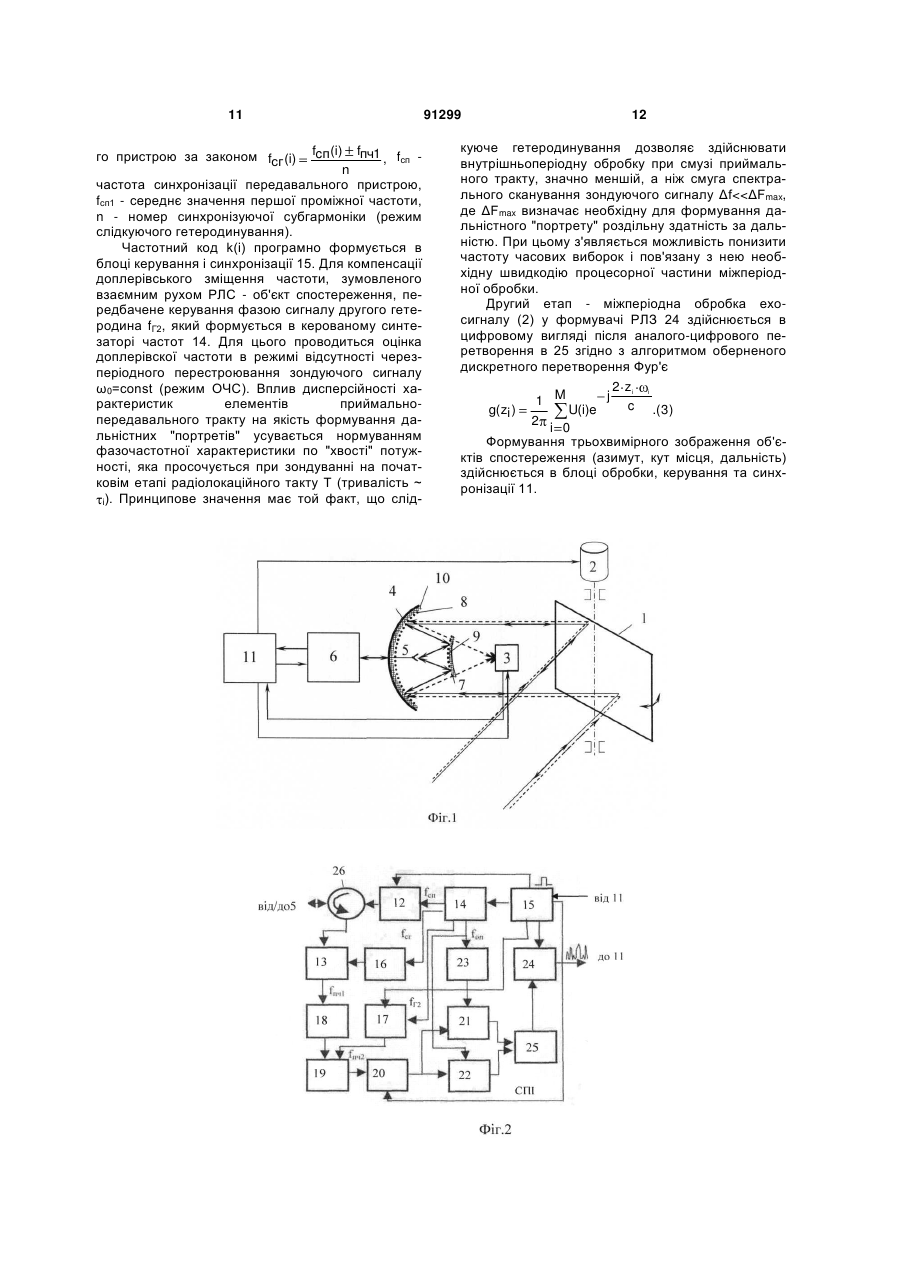
1. Спосіб визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, за яким аналізують тепловий в інфрачервоному діапазоні довжин хвиль і радіолокаційний в міліметровому діапазоні довжин хвиль взаємоконтрасти об'єкта спостереження та фону шляхом механічного переміщення плоского дзеркала, розміщеного в паралельному пучку променів, сформованому параболічною антеною, роздільно фокусують теплове випромінювання об'єкта спостереження за допомогою приймача інфрачервоного діапазону та ехо-сигнал об'єкта спостереження в опромінювачі міліметрового діапазону за рахунок поляризаційної селекції сигналів радіолокаційного каналу у двох друкованих поляризаційних фільтрах та стробують вихідний сигнал приймача теплового випромінювання імпульсами, часове положення яких визначається наявністю ехо-сигналів від об'єкта спостереження на виході радіолокаційного каналу, який відрізняється тим, що взаємопогоджено в просторі та взаємосинхронно в часі відносно об'єкта спостереження формують на виході інфрачервоного каналу кутові "портрети" в координатах "азимут-кут місця", а на виході радіолокаційного каналу почергово в режимах багаточастотного і одночастотного зондування формують дальнісні "портрети" об'єкта спостереження з одночасною оцінкою його доплерівських характеристик. 2 (19) 1 3 91299 4 другого фазових детекторів, до других входів яких підключений четвертий вихід керованого синтезатора частот, причому до другого входу першого фазового детектора через фазоповертач на 90°, а до другого входу другого фазового детектора безпосередньо, другий, третій і четвертий виходи блока керування і синхронізації підключені до другого входу передавального пристрою, керуючого входу керованого фазоповертача і першого входу блока формування дальнісного "портрета" та оцінки доплерівської частоти об'єкта спостереження, вихід якого підключений до блока обробки, керування та синхронізації, а другий вхід якого через аналого-цифровий перетворювач підключений до виходів першого і другого фазових детекторів, п'ятий вихід блока керування і синхронізації підключений до керуючого входу другого підсилювача проміжної частоти. Винахід відноситься до систем дистанційного моніторингу земної поверхні шляхом аналізу випромінених та розсіяних наземними об'єктами електромагнітних хвиль, а саме до систем пошуку, знаходження, розпізнавання наземних об'єктів та оцінки їх форми і параметрів руху. Відомі способи дистанційного моніторингу земної поверхні, основані на порівняльному аналізі теплових полів наземних об'єктів і оточуючого фону шляхом сканування заданої зони спостереження в інфрачервоному (ІЧ) діапазоні електромагнітних хвиль [Криксунов Л.З., Падалко Г.А. Тепловизоры. Справочник. - Киев: "Техника", 1987. - С.134-141], а також розсіяних полів в радіодіапазоні [Радиолокационные методы исследования Земли / Мельник Ю.А., Зубкович С.Г., Степаненко В.Д. и др. / Под ред. Ю.А. Мельника. - М.: Сов. Радио, 1980. - С.113]. Однак, ці способи мають низьку інформативність і точність дистанційного моніторингу, які обумовлені тим що: - в ІЧ діапазоні при високій кутовій роздільній здатності відсутнє розділення за дальністю і доплерівською частотою; - в радіодіапазоні при наявності дальністного і доплерівського розділення неможливо реалізувати високе кутове розділення при обмежених фізичних розмірах апертури антени. Найбільш близьким до запропонованого винаходу є спосіб визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, згідно з яким аналізують тепловий в інфрачервоному діапазоні і радіолокаційний в міліметровому діапазоні взаємоконтрасти об'єкта спостереження і фону шляхом механічного переміщення плоского дзеркала, розміщеного в паралельному пучку променів, сформованому параболічною антеною, роздільно фокусують теплове випромінювання об'єкта спостереження за допомогою приймача інфрачервоного діапазону і ехосигнал об'єкта спостереження в опромінювачі міліметрового діапазону за рахунок поляризаційної селекції сигналів радіолокаційного каналу в двох друкованих поляризаційних фільтрах і стробують вихідний сигнал приймача теплового випромінювання імпульсами, часове положення яких визначається наявністю ехо-сигналів від об'єкта спостереження на виході радіолокаційного каналу [Патент 70868 А Україна, МПК G01J11/00, G01S13/00. Спосіб дистанційного моніторингу земної поверхні та інтегрована система для його реалізації / A.M. Зубков, І.Η. Прудиус, Л.М. Смеркло (Україна). №2003123144; Заявлено 30.12.2003. - Опубл. 15.10.2004. - Бюл. №10]. В цьому способі є низька інформативність і точність дистанційного моніторингу, викликані тим, що не мають високе дальністне і доплерівське розділення, які дозволяють визначити форму об'єкта спостереження в напрямі зондування (дальністний "портрет") і радіальну швидкість руху об'єкта. Система визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, яка складається з плоского скануючого дзеркала механічно зв'язаного з керованим електроприводом, фокусуючого параболічного дзеркала з приймачем теплового випромінювання і опромінювачем міліметрового діапазону, розміщеними у фокусі і геометричному центрі фокусуючого дзеркала відповідно, першого і другого друкованих поляризаційних фільтрів на оптично прозорих підкладках гіперболічної і параболічної форм відповідно, розміщених між приймачем теплового випромінювання і опромінювачем, причому параболічна підкладка з поляризаційним фільтром встановлена на поверхні фокусуючого дзеркала, блоку обробки, керування і синхронізації, перший вихід якого підключений до входу керованого електроприводу плоского скануючого дзеркала, другий вихід і другий вхід до приймача теплового випромінювання [Патент 70868 А Україна, МПК G01J11/00, G01S13/00. Спосіб дистанційного моніторингу земної поверхні та інтегрована система для його реалізації / A.M. Зубков, І.Н. Прудиус, Л.М. Смеркло (Україна). - №2003123144; Заявлено 30.12.2003. - Опубл. 15.10.2004. - Бюл. №10]. Крім того, в інтегрованій системі дистанційного моніторингу земної поверхні друковані поляризаційні фільтри виконані у вигляді дифракційної решітки з шириною лінії d≤0,01 і кроком D, який визначається із рівняння 2,046, де D D ln( ) d робоча довжина хвилі радіолокаційного каналу, а перший друкований поляризаційний фільтр нанесений на гіперболічну підкладку із оптичнопрозорого матеріалу, наприклад кварцу, причому лінії дифракційної решітки орієнтовані паралельно вектору напруженості електричного поля, випроміненого моноімпульсним опромінювачем, а другий друкований поляризаційний фільтр нанесений на параболічну підкладку із оптично-прозорого мате 5 ріалу товщиною 91299 , де - діелектрична про 4 никність матеріалу підкладки, встановлену на поверхню фокусуючого дзеркала, причому лінії дифракційної решітки орієнтовані під кутом 45° до ліній дифракційної решітки першого друкованого поляризаційного фільтра. Характеристики згаданої системи не дають можливості взаємопогоджено в просторі і взаємосинхронно в часі відносно об'єкта використати переваги інфрачервоного каналу - визначення і врахування форми об'єктів спостереження, а також радіолокаційного каналу - визначення параметрів руху об'єктів спостереження за рахунок оцінки доплерівської частоти. В основу запропонованого винаходу поставлене завдання покращити інформативність і точність дистанційного моніторингу земної поверхні шляхом збільшення розмірності зображень наземних об'єктів, які формуються за рахунок одночасного використання переваг ІЧ каналу (висока кутова роздільна здатність) і РЛ каналу (дальністне і доплерівське розділення), щоб забезпечити підвищення ефективності всіх етапів дистанційного моніторингу, а саме: - виявлення і розпізнавання за рахунок визначення і врахування форми об'єктів спостереження за трьома просторовими координатами (азимут, кут місця, дальність); - визначення параметрів руху об'єктів спостереження за рахунок оцінки доплерівської частоти. Поставлене завдання досягається тим, що аналізують тепловий в інфрачервоному діапазоні і радіолокаційний в міліметровому діапазоні взаємоконтрасти об'єкта спостереження і фону шляхом механічного переміщення плоского дзеркала, розміщеного в паралельному пучку променів, сформованому параболічною антеною, роздільно фокусують теплове випромінювання об'єкта спостереження за допомогою приймача інфрачервоного діапазону і ехо-сигнал об'єкта спостереження в опромінювачі міліметрового діапазону за рахунок поляризаційної селекції сигналів радіолокаційного каналу в двох друкованих поляризаційних фільтрах і стробують вихідний сигнал приймача теплового випромінювання імпульсами, часове положення яких визначається наявністю ехо-сигналів від об'єкта спостереження на виході радіолокаційного каналу, згідно винаходу, що взаємопогоджено в просторі і взаємосинхронно в часі відносно об'єкта спостереження формують на виході інфрачервоного каналу кутові "портрети" в координатах "азимут - кут місця", а на виході радіолокаційного каналу почергово в режимах багаточастотного і одночастотного зондування формують дальністні "портрети" об'єкта спостереження з одночасною оцінкою його доплерівських характеристик, а також імпульс на виході радіолокаційного каналу, тривалість якого визначається початком і закінченням дальністного "портрету" об'єкта спостереження, використовують для стробування теплового каналу. Покращення інформативності зображень наземних об'єктів, шляхом збільшення розмірності 6 простору ознак даними ІЧ каналу і РЛ каналу, з врахуванням ефективності доплерівських характеристик об'єктів, дозволяє підвищити ефективність виявлення, розпізнавання та визначення параметрів руху об'єктів спостереження. Поставлене завдання досягається також тим, що система визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, яка складається з плоского скануючого дзеркала механічно зв'язаного з керованим електроприводом, фокусуючого параболічного дзеркала з приймачем теплового випромінювання і опромінювачем міліметрового діапазону, розміщеними у фокусі і геометричному центрі фокусуючого дзеркала відповідно, першого і другого друкованих поляризаційних фільтрів на оптично прозорих підкладках гіперболічної і параболічної форм відповідно, розміщених між приймачем теплового випромінювання і опромінювачем, причому параболічна підкладка з поляризаційним фільтром встановлена на поверхні фокусуючого дзеркала, блоку обробки, керування і синхронізації, перший вихід якого підключений до входу керованого електроприводу плоского скануючого дзеркала, другий вихід і другий вхід до приймача теплового випромінювання, згідно винаходу, що додатково містить когерентно-імпульсну РЛС міліметрового діапазону з спектральним скануванням зондуючого сигналу, яка з'єднана з приймачем теплового випромінювання і з блоком обробки, керування і синхронізації. Когерентно-імпульсна РЛС міліметрового діапазону (ММД) з спектральним скануванням зондуючого сигналу для формування дальністного "портрету" і оцінки доплерівської частоти об'єкту спостереження містить передавальний пристрій, який через циркулятор розв'язки "прийомпередача" підключається до випромінювача при зондуванні, перший змішувач, який через циркулятор розв'язки "прийом-передача" підключений до виходу випромінювача при прийомі ехо-сигналів, керований синтезатор частот з черезперіодним перестроюванням частоти, керуючий вхід якого підключений до першого виходу блока керування і синхронізації, вхід якого призначений для підключення до блоку обробки, керування та синхронізації, вихід першого гетеродину підключений до гетеродинного входу першого змішувача, вихід якого через перший підсилювач проміжної частоти підключений до сигнального входу другого змішувача, до гетеродинного входу якого підключений керований фазоповертач, вихід другого змішувача через другий підсилювач проміжної частоти підключений до перших входів першого і другого фазових детекторів, до других входів яких підключений четвертий вихід керованого синтезатора частот, причому до другого входу першого фазового детектора через фазоповертач на 90°, а до другого входу другого фазового детектора безпосередньо, другий, третій і четвертий виходи блоку керування і синхронізації підключені до другого входу передавального пристрою, керуючого входу керованого фазоповертача і першого входу блока формування дальністного "портрету" і оцінки доплерівської частоти об'єкта спостереження, вихід якого приз 7 начений для підключення до блоку обробки, керування та синхронізації, а другий вхід якого через аналого-цифровий перетворювач підключений до виходів першого і другого фазових детекторів, а п'ятий вихід блока керування і синхронізації підключений до керуючого входу другого підсилювача проміжної частоти, а формування дальністних "портретів" і оцінок доплерівської частоти об'єктів спостереження в когерентно-імпульсній РЛС міліметрового діапазону здійснюється почергово в режимах багаточастотного і одночастотного зондування. Використання РЛС для формування радіолокаційних зображень (РЛЗ) в рамках єдиної електродинамічної схеми формування зони спостереження для теплового і радіолокаційного каналів дозволяє взаємосинхронно в реальному масштабі часу, зв'язану з циклом сканування зони спостереження, формувати оптичне зображення (ОЗ) кутові "портрети" з високим кутовим розділенням і РЛЗ - дальністні "портрети" з високим дальністним ідоплерівським розділенням, а в блоці обробки керування і синхронізації отримувати трьохмірне зображення об'єкта спостереження з одночасним вимірюванням радіальної швидкості його руху, що суттєво підвищує інформативність і точність моніторингу. На Фіг.1 представлена схема визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, а на Фіг.2 представлена схема когерентно-імпульсної РЛС ММД з спектральним скануванням зондуючого сигналу для формування дальністного портрету і оцінки доплерівської частоти об'єкту. Спосіб визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу (Фіг.1) здійснюється наступним чином (суцільною лінією позначений шлях зондуючого і ехо-сигналу радіолокаційного каналу, штриховою лінією шлях сигналу теплового випромінювання 14 діапазону): аналізують тепловий в інфрачервоному діапазоні і радіолокаційний в міліметровому діапазоні взаємоконтрасти об'єкта спостереження і фону шляхом механічного переміщення плоского скануючого дзеркала 1, розміщеного в паралельному пучку променів, сформованому параболічною дзеркальною антеною 4, роздільно фокусують теплове випромінювання об'єкта спостереження за допомогою приймача інфрачервоного діапазону 3 і ехо-сигнал об'єкта спостереження в опромінювачі міліметрового діапазону 5 за рахунок поляризаційної селекції сигналів радіолокаційного каналу в двох друкованих поляризаційних фільтрах 7, 8 і стробують вихідний сигнал приймача теплового випромінювання 3 імпульсами, часове положення яких визначається наявністю ехо-сигналів від об'єкта спостереження на виході радіолокаційного каналу, взаємопогоджено в просторі і взаємосинхронно в часі відносно об'єкта спостереження формують на виході інфрачервоного каналу кутові "портрети" в координатах "азимут - кут місця", а на виході радіолокаційного каналу почергово в режимах багаточастотного і одночастотного зондування формують дальністні "портрети" об'єкта спостере 91299 8 ження з одночасною оцінкою його доплерівських характеристик. Система визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу (Фіг.1) містить плоске скануюче дзеркало 1, яке механічно пов'язане з керованим електроприводом 2, приймач теплового випромінювання 3, фокусуюче дзеркало 4, виконане, наприклад, у вигляді поверхні параболоїда обертання. В геометричному центрі фокусуючого дзеркала 4 розташований опромінювач ММД 5, конструктивно і електрично з'єднаний з когерентноімпульсною РЛС ММД для формування дальністного "портрету" і оцінки доплерівської частоти об'єкту 6. Між опромінювачем ММД 5 і приймачем теплового випромінювання 3 встановлені перший і другий друковані поляризаційні фільтри 7 і 8, нанесені, відповідно, на гіперболічну та параболічну підкладки 9 і 10, виконані із оптично прозорого матеріалу, наприклад, кварцу. Вихід і вхід когерентно-імпульсної РЛС 6 під'єднаний до блоку обробки, керування та синхронізації 11. Когерентно-імпульсна РЛС з спектральним скануванням зондуючого сигналу для формування дальністного "портрету" і оцінки доплерівської частоти об'єкту 6 містить (Фіг.2) передавальний пристрій 12, який через циркулятор розв'язки "прийомпередача" 26 підключений до входу опромінювача ММД 5 системи при зондуванні, перший змішувач 13, який через циркулятор розв'язки "прийомпередача" 26 підключений до виходу опромінювача ММД 5 системи при прийомі ехо-сигналу, керований синтезатор частот з черезперіодним перестроюванням частоти 14, керований вхід якого підключений до першого виходу блока керування і синхронізації 15, вхід якого призначений для підключення до блоку обробки, керування та синхронізації 11, вихід першого гетеродину 16 підключений до гетеродинного входу першого змішувача 13, вихід якого через перший підсилювач проміжної частоти 18, підключений до сигнального входу другого змішувача 19, до гетеродинного входу якого підключений керований фазоповертач 17, а вихід другого змішувача 19 через другий підсилювач проміжної частоти 20 підключений до перших входів першого і другого фазових детекторів 21, 22 до других входів яких підключений четвертий вихід керованого синтезатора частот 14, причому до другого входу першого фазового детектора 21 через фазоповертач на 90° 23, а до другого входу другого детектора 22 безпосередньо, другий, третій і четвертий виходи блока керування і синхронізації 15 підключені до другого входу передавального пристрою 12, до керуючого входу керованого фазоповертача 17 і першого входу блока формування дальністного "портрету" і оцінки доплерівської частоти 24, вихід якого призначений для підключення до блоку обробки, керування та синхронізації 11, а другий вхід якого через аналого-цифровий перетворювач 25 підключений до виходів першого і другого фазових детекторів 21, 22, а п'ятий вихід блока керування і синхронізації 15 підключений до керуючого входу другого підсилювача проміжної частоти 20. 9 У запропонованому винаході огляд заданої зони спостереження за кутовими координатами одночасно в ІЧ і ММД здійснюють за рахунок переміщення плоского скануючого дзеркала 1, яке знаходиться в зоні плоскої електромагнітної хвилі приймаючого поля теплового випромінювання в 14 діапазоні і приймаючого поля, розсіяного земною поверхнею (об'єктом), у ММД радіолокаційного каналу. Поле теплового випромінювання фокусують у приймачі теплового випромінювання 3 за допомогою фокусуючого дзеркала 4, а поле відбитого радіолокаційного сигналу в опромінювачі ММД 5. При цьому забезпечують паралельну і взаємоузгоджену в просторі і часі роботу ІЧ і ММД каналів. Система визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу працює так: приймальне поле теплового випромінювання в ІЧ діапазоні після відбивання від поверхні плоского скануючого дзеркала 1, внаслідок повторного відбивання від фокусуючого дзеркала 4 фокусується в приймачі теплового випромінювання 3. При цьому режим огляду заданої зони спостереження здійснюється завдяки переміщенню плоского скануючого дзеркала 1, механічно зв'язаного з керованим електроприводом 2. Одночасно зондуючі сигнали когерентно-імпульсної РЛС ММД 6, сформовані опромінювачем ММД 5, гіперболічним контррефлектором, створеним першим друкованим поляризаційним фільтром 7 і фокусуючим дзеркалом 4 із нанесеним на його поверхню другим поляризаційним фільтром 8, відбиваючись від поверхні плоского скануючого дзеркала забезпечують паралельний огляд тепловипромінюючих ділянок земної поверхні в ММД. Проходження електромагнітних хвиль теплового випромінювання через друковані поляризаційні фільтри 7 і 8 забезпечується виготовленням гіперболічної та параболічної підкладок із прозорого в ІЧ діапазоні матеріалу, наприклад, кварцу. Відбиття сформованого опромінювачем ММД 5 електромагнітного поля від першого друкованого поляризаційного фільтру 7 забезпечується вибором геометричних розмірів дифракційної решітки. При відбиванні від фокусуючого дзеркала 4 з урахуванням другого поляризаційного фільтру 8 електромагнітна хвиля ММД змінює поляризацію на 90°. Таким чином забезпечується розв'язка каналів ІЧ і ММД в межах єдиної електродинамічної схеми формування зони спостереження. Для виключення впливу теплового випромінювання від елементів дальності, в яких відсутні наземні об'єкти, які спостерігаються, приймач теплового випромінювання 3 стробується імпульсами, часове положення яких визначається наявністю ехо-сигналів від наземних об'єктів на виході радіолокаційного каналу, причому ці імпульси формуються на другому виході блоку обробки, керування і синхронізації 11 після формування дальністного "портрету" наземного об'єкту на виході когерентно-імпульсної РЛС 6, однозначно пов'язаного з поздовжніми (в напрямі зондування) геометричними розмірами об'єкту спостереження. На першому виході блоку 11 формуються сигнали керування електроприводом 2 плоского скануючого дзеркала 1, яке забез 91299 10 печує сканування заданої зони спостереження і, як наслідок, визначення кутових і дальністних розмірів об'єктів спостереження. На третьому виході блока обробки, керування і синхронізації 11 формуються сигнали керування режимом зондування когерентно-імпульсної РЛС формування РЛЗ: - багаточастотний сигнал (БЧС) для формування дальністного "портрету"; - одночастотний сигнал (ОЧС) для формування оцінки доплерівської частоти. Когерентно-імпульсна РЛС формування дальністного "портрету" і оцінки доплерівської частоти об'єкту 6 працює наступним чином. При формуванні дальністного "портрету" зондуючий сигнал на вході опромінювача ММД 5 аналітично описується виразом I 1 t iT j 0 k(i) ) t S3 ( t ) S0rect e , (1) i i 0 де S0 - амплітуда зондуючого сигналу; rect t 1 для t i ; i i Τ - період повторення радіоімпульсів; і - тривалість радіоімпульса; ω0 - початкове значення несучої частоти; Δω - мінімальний дискрет черезперіодного перестроювання частоти; {k(і), і=0,..., І-1} - частотний код; І - кількість символів в коді. Тоді ехо-сигнал на вході першого змішувача 13 у випадку протяжного об'єкту з точністю до постійного множника для дискретного часу має вигляд 2 zi i M j c , (2) U(i) g( zi ) e 0 для t i 0 де і=1,...,Μ - номер елемента дальності в меc i жах сегменту z , який визначається стро2 бом прийому інформації (СПІ); М - кількість елементів дальності протяжного об'єкта; ω1=ω0+k(і)Δω; g(z) - дальністний "портрет" об'єкта; с - швидкість світла. В основу побудови ключового елементу структури РЛС твердотільного приймальнопередавального пристрою покладено принцип формування взаємокогерентних сигналів передавального 12 і гетеродинного 16 пристроїв шляхом синхронізації імпульсних і неперервних генераторів на лавинно-пролітних діодах (ЛПД) субгармонійними сигналами, отриманих на основі єдиного високостабільного кварцового генератора в керованому синтезаторі частот 14. Кореляційнофільтрова обробка ехо-сигналу здійснюється в два етапи. Перший етап - внутрішньоперіодна обробка, яка здійснюється в другому підсилювачі проміжної частоти 20, що має смугу пропускання Δf 1/ і. При цьому, "згортання" ехо-сигнала в смугу пропускання головного УПЧ досягається за рахунок черезперіодної зміни частоти синхронізації гетеродинно 11 fcп (i) fпч1 , fсп n частота синхронізації передавального пристрою, fсп1 - середнє значення першої проміжної частоти, n - номер синхронізуючої субгармоніки (режим слідкуючого гетеродинування). Частотний код k(і) програмно формується в блоці керування і синхронізації 15. Для компенсації доплерівського зміщення частоти, зумовленого взаємним рухом РЛС - об'єкт спостереження, передбачене керування фазою сигналу другого гетеродина fГ2, який формується в керованому синтезаторі частот 14. Для цього проводиться оцінка доплерівскої частоти в режимі відсутності черезперіодного перестроювання зондуючого сигналу ω0=const (режим ОЧС). Вплив дисперсійності характеристик елементів приймальнопередавального тракту на якість формування дальністних "портретів" усувається нормуванням фазочастотної характеристики по "хвості" потужності, яка просочується при зондуванні на початковім етапі радіолокаційного такту Τ (тривалість ~ і). Принципове значення має той факт, що слід го пристрою за законом fсг (i) 91299 12 куюче гетеродинування дозволяє здійснювати внутрішньоперіодну обробку при смузі приймального тракту, значно меншій, а ніж смуга спектрального сканування зондуючого сигналу Δf
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of geometric characteristics and parameters of motion of surface objects at geo-monitoring and system for its realization
Автори англійськоюZubkov Anatolii Mykolaiovych, Prudyus Ivan Nykyforovych, Lazko Leonid Viktorovych, Mymrikov Dmytro Oleksandrovych
Назва патенту російськоюСпособ определения геометрических характеристик и параметров движения наземных объектов при геомониторинге и система для его реализации
Автори російськоюЗубков Анатолий Николаевич, Прудиус Иван Никифорович, Лазько Леонид Викторович, Мымриков Дмитрий Александрович
МПК / Мітки
МПК: G01S 13/00, G01J 3/28
Мітки: реалізації, руху, визначення, об'єктів, спосіб, геометричних, геомоніторингу, наземних, система, параметрів, характеристик
Код посилання
<a href="https://ua.patents.su/7-91299-sposib-viznachennya-geometrichnikh-kharakteristik-i-parametriv-rukhu-nazemnikh-obehktiv-pri-geomonitoringu-i-sistema-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення геометричних характеристик і параметрів руху наземних об’єктів при геомоніторингу і система для його реалізації</a>
Спосіб ультразвукового вимірювання параметрів руху і пристрій для його реалізації
Номер патенту: 67829
Опубліковано: 15.07.2004
Автори: БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, Гірник Сергій Арнольдович, Волохов Володимир Олексійович
МПК: A61B 8/00
Мітки: ультразвукового, реалізації, вимірювання, руху, параметрів, пристрій, спосіб
Формула / Реферат:
1. Спосіб ультразвукового імпульсного вимірювання параметрів руху суцільних середовищ, який містить задання напрямку зондування досліджуваного середовища, періодичне випромінювання вздовж заданого напрямку зондування послідовності зондуючих ультразвукових хвильових імпульсів, прийом ультразвукових хвиль, відбитих від досліджуваного середовища, перетворення відбитих ультразвукових хвиль в електричний сигнал відгуку, його підсилення,...
Спосіб дистанційного моніторингу земної поверхні та інтегрована система для його реалізації
Номер патенту: 70868
Опубліковано: 15.10.2004
Автори: Зубков Анатолій Миколайович, Прудиус Іван Никифорович, Смеркло Любомир Михайлович
МПК: G01S 13/00, G01J 11/00
Мітки: система, реалізації, спосіб, земної, дистанційного, інтегрована, поверхні, моніторингу
Формула / Реферат:
1. Спосіб дистанційного моніторингу земної поверхні, згідно з яким аналізують тепловий взаємоконтраст наземних об'єктів і фону при скануванні заданої області спостереження в інфрачервоному діапазоні шляхом механічного переміщення плоского дзеркала, розміщеного в паралельному пучку променів, сформованому параболічним фокусуючим дзеркалом, фокусують і приймають теплове випромінювання, який відрізняється тим, що одночасно зі скануванням в...
Спосіб забезпечення насосом робочих характеристик морського ерліфта та система для його реалізації
Номер патенту: 86440
Опубліковано: 27.04.2009
Автори: Кириченко Володимир Євгенович, Євтєєв Володимир Васильович, Кириченко Євген Олексійович, Шворак Віталій Григорович
МПК: E21C 45/00, F04F 1/20
Мітки: реалізації, насосом, ерліфта, система, забезпечення, робочих, характеристик, спосіб, морського
Формула / Реферат:
1. Спосіб забезпечення насосом робочих характеристик морського ерліфта, що включає підйом елементів підводних родовищ корисних копалин у складі гідросуміші, створення багатокомпонентної суміші після надходження стисненого повітря в потік гідросуміші, транспортування потоку багатокомпонентної суміші в підйомній трубі морського ерліфта, створення водоповітряної суміші шляхом безперервної подачі стисненого повітря в окремий потік води, подальше...
Радіолокаційний вимірювач параметрів руху наземних транспортних засобів
Номер патенту: 23871
Опубліковано: 16.10.2000
Автор: Непорада Сергій Миколайович
МПК: G01S 11/00
Мітки: транспортних, руху, параметрів, вимірювач, радіолокаційний, засобів, наземних
Формула / Реферат:
Радиолокационный измеритель параметров движения наземных транспортных средств, содержащий соединенные СВЧ генератор и циркулятор, две приемо-передаю-щие антенны, смеситель, выход которого соединен с входом усилителя доплеровских частот, который через фильтр с фазовой автоподстройкой частот соединен с устройством измерения пройденного пути, скорости и ускорения, отличающийся тем, что выход циркулятора соединен со входом дополнительно...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Ліпунова Валентина Григорівна, Черняк Сергій Іванович, Кадочніков Сергій Михайлович
МПК: F41G 3/22
Мітки: нашоломна, визначення, візира, спосіб, орієнтації, осі, система, реалізації, цілевказування
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Попередній патент: Двокоординатний електромеханічний тренажер стрільця
Наступний патент: Спосіб виготовлення фотоперетворювача ультрафіолетового випромінювання
Випадковий патент: Центрифуга