Двокоординатний електромеханічний тренажер стрільця
Номер патенту: 91298
Опубліковано: 12.07.2010
Автори: Поповіченко Олександр Вікторович, Ярмолюк Вадим Михайлович, Васильєв Валерій Валентинович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Грачьов Микола Миколайович


Формула / Реферат
1. Двокоординатний електромеханічний тренажер стрільця, що складається з двох координатних приводів, виконаних на базі широкорегульованих лінійних електричних двигунів, що форсуються з високою перевантажувальною здатністю, путні прямолінійні структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини, який відрізняється тим, що симетрично розміщені один проти одного активні рухомі блоки-модулі координатних лінійних електричних двигунів, жорстко закріплені на взаємно перпендикулярних напрямних, що знаходяться в паралельних площинах, а площадка для фіксації бійця, що тренується, забезпечена двома парами опор качання, в яких, з можливістю вільного переміщення, проходять напрямні координатні.
2. Двокоординатний електромеханічний тренажер стрільця за п. 1, який відрізняється тим, що кожна з координатних пар активних рухомих блоків-модулів приводних лінійних електричних двигунів жорстко об'єднана тільки одною напрямною трубчастої циліндрової форми.
3. Двокоординатний електромеханічний тренажер стрільця за п. 1, який відрізняється тим, що пари активних рухомих блоків-модулів координатних лінійних двигунів, що протилежать, жорстко закріплені на двох напрямних.
4. Двокоординатний електромеханічний тренажер стрільця за пп. 1, 2 і 3, який відрізняється тим, що двокоординатний лінійний електропривод тренажера прикріплений до горизонтальної монтажної пластини, що знаходиться на стелі або порталі, причому площадка для фіксації тренованого стрільця з пластиною приводу, що відпрацьовує координатне завдання, сполучена системою жорстких вертикальних стрижнів або підвішена на гнучких стропах.
5. Двокоординатний електромеханічний тренажер стрільця за пп. 1, 2 і 3, який відрізняється тим, що для кріплення стельового кріплення двокоординатного лінійного електропривода застосована проміжна горизонтальна пластина з постійними магнітами.
6. Двокоординатний електромеханічний тренажер стрільця за пп. 1, 2, 3 і 4, який відрізняється тим, що на площадці для розміщення стрільця додатково встановлена горизонтальна поворотна платформа, що приводиться електричним двигуном, що обертається.
Текст
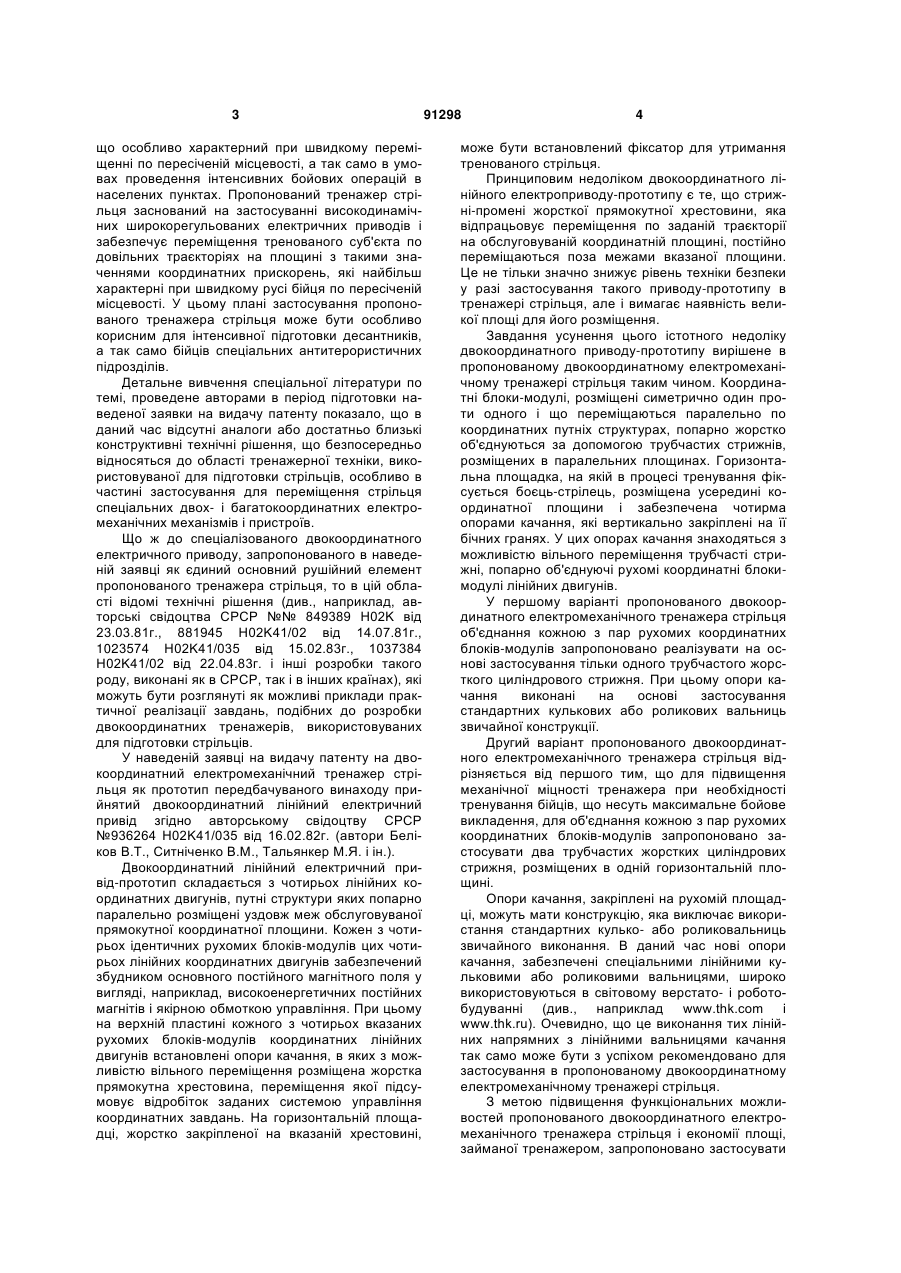
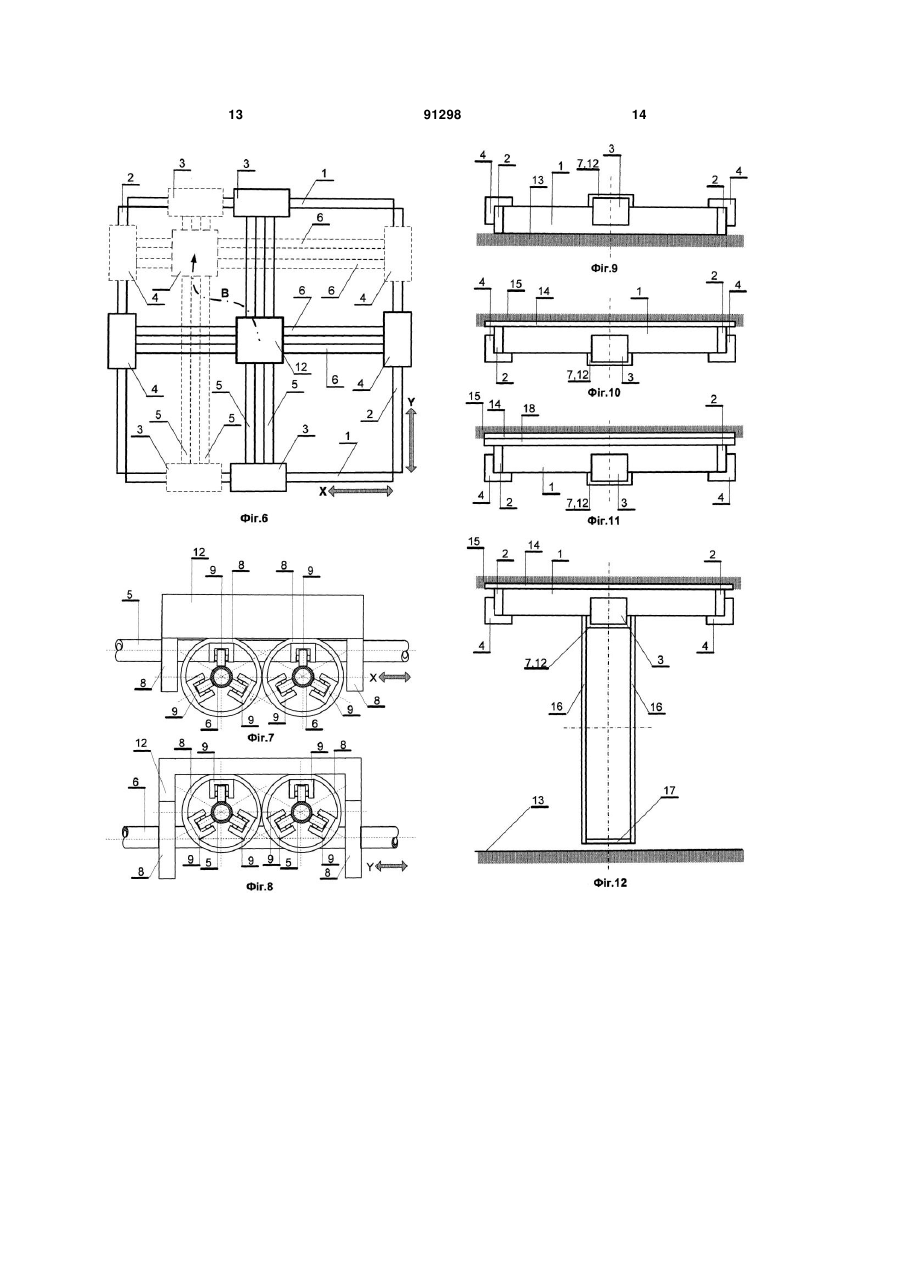
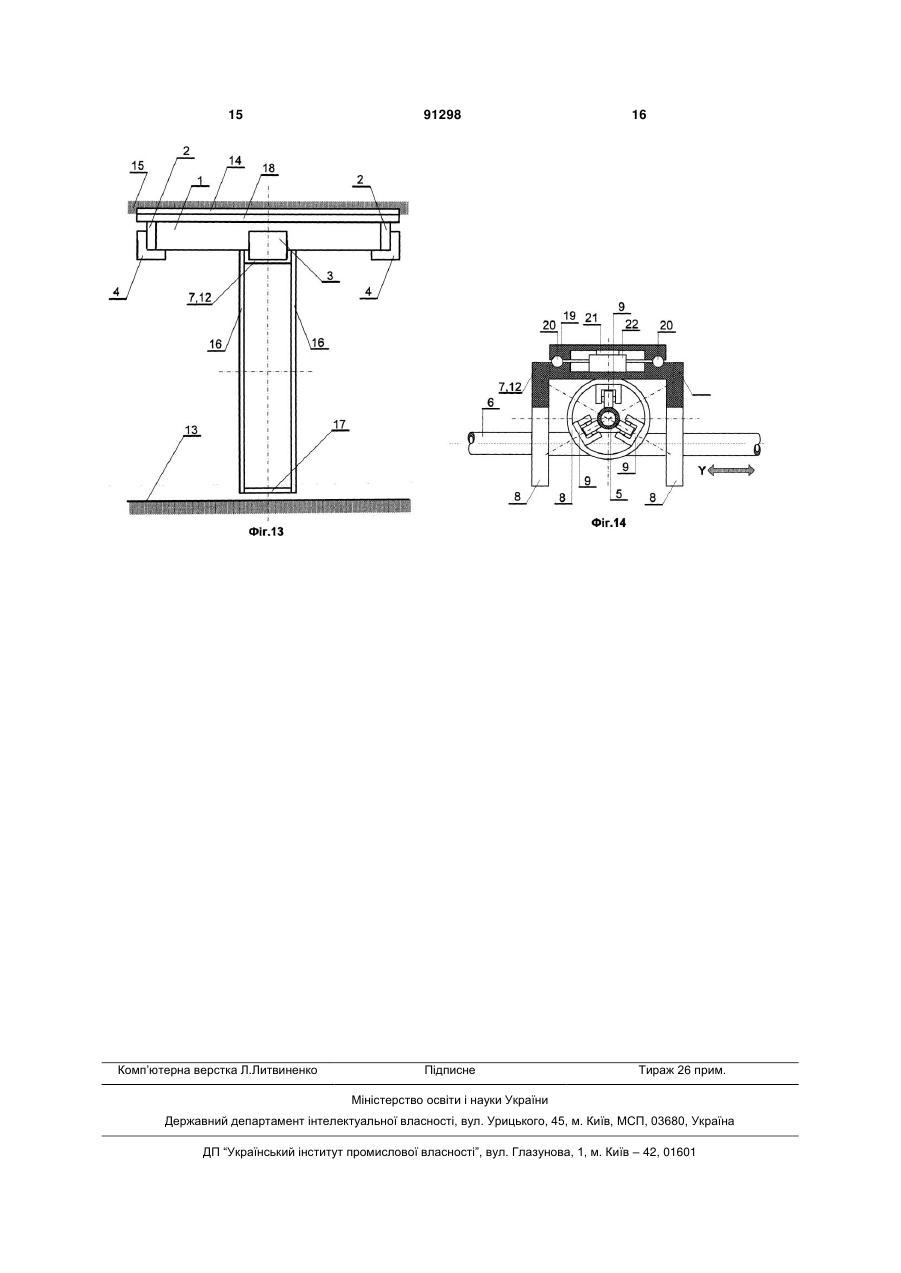
1. Двокоординатний електромеханічний тренажер стрільця, що складається з двох координатних приводів, виконаних на базі широкорегульованих лінійних електричних двигунів, що форсуються з високою перевантажувальною здатністю, путні прямолінійні структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини, який відрізняється тим, що симетрично розміщені один проти одного активні рухомі блоки-модулі координатних лінійних електричних двигунів, жорстко закріплені на взаємно перпендикулярних напрямних, що знаходяться в паралельних площинах, а площадка для фіксації бійця, що тренується, забезпечена двома парами опор качання, в яких, з можливістю вільного переміщення, проходять напрямні координатні. C2 2 (19) 1 3 що особливо характерний при швидкому переміщенні по пересіченій місцевості, а так само в умовах проведення інтенсивних бойових операцій в населених пунктах. Пропонований тренажер стрільця заснований на застосуванні високодинамічних широкорегульованих електричних приводів і забезпечує переміщення тренованого суб'єкта по довільних траєкторіях на площині з такими значеннями координатних прискорень, які найбільш характерні при швидкому русі бійця по пересіченій місцевості. У цьому плані застосування пропонованого тренажера стрільця може бути особливо корисним для інтенсивної підготовки десантників, а так само бійців спеціальних антитерористичних підрозділів. Детальне вивчення спеціальної літератури по темі, проведене авторами в період підготовки наведеної заявки на видачу патенту показало, що в даний час відсутні аналоги або достатньо близькі конструктивні технічні рішення, що безпосередньо відносяться до області тренажерної техніки, використовуваної для підготовки стрільців, особливо в частині застосування для переміщення стрільця спеціальних двох- і багатокоординатних електромеханічних механізмів і пристроїв. Що ж до спеціалізованого двокоординатного електричного приводу, запропонованого в наведеній заявці як єдиний основний рушійний елемент пропонованого тренажера стрільця, то в цій області відомі технічні рішення (див., наприклад, авторські свідоцтва СРСР №№ 849389 Η02K від 23.03.81г., 881945 Η02K41/02 від 14.07.81г., 1023574 Η02K41/035 від 15.02.83г., 1037384 Η02K41/02 від 22.04.83г. і інші розробки такого роду, виконані як в СРСР, так і в інших країнах), які можуть бути розглянуті як можливі приклади практичної реалізації завдань, подібних до розробки двокоординатних тренажерів, використовуваних для підготовки стрільців. У наведеній заявці на видачу патенту на двокоординатний електромеханічний тренажер стрільця як прототип передбачуваного винаходу прийнятий двокоординатний лінійний електричний привід згідно авторському свідоцтву СРСР №936264 Η02K41/035 від 16.02.82г. (автори Беліков В.Т., Ситніченко В.М., Тальянкер М.Я. і ін.). Двокоординатний лінійний електричний привід-прототип складається з чотирьох лінійних координатних двигунів, путні структури яких попарно паралельно розміщені уздовж меж обслуговуваної прямокутної координатної площини. Кожен з чотирьох ідентичних рухомих блоків-модулів цих чотирьох лінійних координатних двигунів забезпечений збудником основного постійного магнітного поля у вигляді, наприклад, високоенергетичних постійних магнітів і якірною обмоткою управління. При цьому на верхній пластині кожного з чотирьох вказаних рухомих блоків-модулів координатних лінійних двигунів встановлені опори качання, в яких з можливістю вільного переміщення розміщена жорстка прямокутна хрестовина, переміщення якої підсумовує відробіток заданих системою управління координатних завдань. На горизонтальній площадці, жорстко закріпленої на вказаній хрестовині, 91298 4 може бути встановлений фіксатор для утримання тренованого стрільця. Принциповим недоліком двокоординатного лінійного електроприводу-прототипу є те, що стрижні-промені жорсткої прямокутної хрестовини, яка відпрацьовує переміщення по заданій траєкторії на обслуговуваній координатній площині, постійно переміщаються поза межами вказаної площини. Це не тільки значно знижує рівень техніки безпеки у разі застосування такого приводу-прототипу в тренажері стрільця, але і вимагає наявність великої площі для його розміщення. Завдання усунення цього істотного недоліку двокоординатного приводу-прототипу вирішене в пропонованому двокоординатному електромеханічному тренажері стрільця таким чином. Координатні блоки-модулі, розміщені симетрично один протиодного і що переміщаються паралельно по координатних путніх структурах, попарно жорстко об'єднуються за допомогою трубчастих стрижнів, розміщених в паралельних площинах. Горизонтальна площадка, на якій в процесі тренування фіксується боєць-стрілець, розміщена усередині координатної площини і забезпечена чотирма опорами качання, які вертикально закріплені на її бічних гранях. У цих опорах качання знаходяться з можливістю вільного переміщення трубчасті стрижні, попарно об'єднуючі рухомі координатні блокимодулі лінійних двигунів. У першому варіанті пропонованого двокоординатного електромеханічного тренажера стрільця об'єднання кожною з пар рухомих координатних блоків-модулів запропоновано реалізувати на основі застосування тільки одного трубчастого жорсткого циліндрового стрижня. При цьому опори качання виконані на основі застосування стандартних кулькових або роликових вальниць звичайної конструкції. Другий варіант пропонованого двокоординатного електромеханічного тренажера стрільця відрізняється від першого тим, що для підвищення механічної міцності тренажера при необхідності тренування бійців, що несуть максимальне бойове викладення, для об'єднання кожною з пар рухомих координатних блоків-модулів запропоновано застосувати два трубчастих жорстких циліндрових стрижня, розміщених в одній горизонтальній площині. Опори качання, закріплені на рухомій площадці, можуть мати конструкцію, яка виключає використання стандартних кулько- або роликовальниць звичайного виконання. В даний час нові опори качання, забезпечені спеціальними лінійними кульковими або роликовими вальницями, широко використовуються в світовому верстато- і роботобудуванні (див., наприклад www.thk.com і www.thk.ru). Очевидно, що це виконання тих лінійних напрямних з лінійними вальницями качання так само може бути з успіхом рекомендовано для застосування в пропонованому двокоординатному електромеханічному тренажері стрільця. З метою підвищення функціональних можливостей пропонованого двокоординатного електромеханічного тренажера стрільця і економії площі, займаної тренажером, запропоновано застосувати 5 стельове кріплення двокоординатного лінійного електроприводу, для чого необхідно встановити в стельовій балці металеву пластину, безпосередньо на якій повинен бути закріплений вказаний вище двокоординатний лінійний привід. В цьому випадку тренований стрілець розміщений на додатковій горизонтальній площадці, що знаходиться на невеликій відстані від підлоги. Ця додаткова горизонтальна площадка, на якій фіксується тренований стрілець, може бути сполучена з виконавчою горизонтальною площадкою двокоординатного лінійного електроприводу, що знаходиться зверху, двома способами, а саме, - системою жорстких вертикальних стрижнів або гнучкими ременями, які імітують парашутні стропи. У другому випадку за допомогою пропонованого тренажера стрільця можна здійснювати тренування бійців повітряного десанта для підготовки їх до виконання прицільної стрілянини під час спуску на парашутах. Спрощення проведення монтажних робіт по установці тренажера стельового кріплення досягнуте на основі використання комплекту постійних магнітів, закріплених на спеціальній проміжній пластині, на якій встановлений двокоординатний привід тренажера. З метою подальшого підвищення функціональних можливостей пропонованого двокоординатного електромеханічного тренажера стрільця запропоновано закріпити на рухомій площадці тренажера, що відпрацьовує заданий рух тренованого стрільця по плоскій траєкторії, додаткову платформу, що обертається, яка має можливість повороту навколо вертикальної осі за допомогою приводного електричного двигуна, що обертається, встановленого на рухомій площадці тренажера. Ротор вказаного електричного двигуна безпосередньо жорстко механічно пов'язаний з платформою, що обертається, без яких-небудь проміжних передач. У разі стельового кріплення двокоординатного лінійного електроприводу тренажера платформа, що обертається, встановлюється на нижній горизонтальній площадці тренажера, де розміщується тренований стрілець. На кресленнях, що ілюструють конструктивну суть пропонованого модульного структурованого військового наземного робота з вертикальним гвинтовим підйомником, представлені: Фіг.1. Двокоординатний електромеханічний тренажер стрільця при об'єднанні пар рухомих координатних блоків-модулів за допомогою одного трубчастого стрижня циліндрової форми, вигляд зверху; Фіг.2. Елемент опори качання пропонованого тренажера, виконаний на основі стандартних кулькових або роликових вальниць звичайної конструкції, вигляд спереду; Фіг.3. Елемент опори качання пропонованого тренажера, виконаний на основі стандартних кулькових або роликових вальниць звичайної конструкції, вигляд збоку; Фіг.4. Площадка для відробітку координатного завдання з опорами качання при одному координатному об'єднувальному стрижні, вигляд спереду; 91298 6 Фіг.5. Площадка для відробітку координатного завдання з опорами качання при одному координатному об'єднувальному стрижні, вигляд збоку; Фіг.6. Двокоординатний електромеханічний тренажер стрільця при об'єднанні пар рухомих координатних модулів за допомогою двох трубчастих стрижнів циліндрової форми, вигляд зверху; Фіг.7. Площадка для відробітку координатного завдання з опорами качання при двох координатних об'єднувальних стрижнях, вигляд спереду; Фіг.8. Площадка для відробітку координатного завдання з опорами качання при двох об'єднувальних стрижнях, вигляд збоку; Фіг.9. Підлогова установка двокоординатного електромеханічного тренажера стрільця, вигляд спереду; Фіг.10. Стельове або портальне кріплення двокоординатного лінійного електроприводу тренажера стрільця до металевої плити, вигляд спереду; Фіг.11. Стельове або портальне кріплення двокоординатного лінійного електроприводу тренажера за допомогою проміжної плити з постійними магнітами, вигляд спереду; Фіг.12. Двокоординатний електромеханічний тренажер стрільця при стельовому або портальному кріпленні по Фіг.10, вигляд спереду; Фіг.13. Двокоординатний електромеханічний тренажер стрільця при стельовому або портальному кріпленні по Фіг.11, вигляд спереду; Фіг.14. Горизонтальна площадка електромеханічного тренажера стрілка, яка забезпечена додатковою платформою, що обертається, вигляд спереду. Представлену на Фіг.1 конструктивну компоновку пропонованого двокоординатного електромеханічного тренажера стрільця виконано на основі двокоординатного лінійного електричного приводу, який складається з двох пар нерухомих лінійних путніх структур 1 і 2, попарно розміщених уподовж меж обслуговуваної прямокутної координатної площини у напрямі координатних осей X і Y, відповідно. Кожна з нерухомих лінійних путніх структур забезпечена активним рухомим тяговим блоком-модулем 3 для путніх структур координатного напряму X і активним рухомим тяговим блоком-модулем 4 для координатного напряму Y. Активні рухомі блоки-модулі 3 і 4 несуть джерело збудження основного магнітного поля, який в більшості випадків складається з високоенергетичних постійних магнітів, і якірну обмотку управління, яка одержує живлення від відповідного перетворювача. Ці елементи лінійного двигуна не є предметом винаходу і тому на Фіг.1 не показані. Пари рухомих активних координатних блоків-модулів, що протилежать один одному 3 і 4, об'єднані в жорстких рухомих координатних конструктивів за допомогою жорстких трубчастих стрижнів 5 і 6, відповідно. Вказані жорсткі трубчасті стрижніі о розміщені в паралельних площинах, завдяки чому досягнуте незалежне один від одного координатне переміщення пар рухомих координатних блоківмодулів 3 і 4. Сумарне координатне завдання в пропонованому двокоординатному електромеханічному тренажері стрільця відпрацьовується за 7 допомогою горизонтальної площадки 7, яка завжди переміщається виключно у межах обслуговуваної двокоординатним приводом координатної площини. На кожній з чотирьох бічних граней вказаної горизонтальної площадки 7 жорстко у вертикальному напрямі закріплено чотири опори качання, основний елемент яких представлений на фігурах 2 і 3. На внутрішній поверхні кільцевої обичайки 8 під кутом 120° один до одного закріплено три корпуси 9, в яких на осях 10 знаходяться кулькові або роликові вальниці 11. У механічному контакті із зовнішніми поверхнями вальниць качання 11, як показано на Фіг.2, знаходяться зовнішні поверхні жорстких трубчастих стрижнів 5 або 6, об'єднуючих рухомі блоки-модулі 3 і 4 в жорсткі конструктиви координатних переміщень. Повністю очевидно, що запропонована конструкція опор качання, представлена на фігурах 2 і 3, забезпечує вільне переміщення горизонтальної площадки 7 уздовж координатних напрямів X і Υ прямокутної системи координат. На фігурах 4 і 5 представлена конструкція площадки 7 в комплекті із закріпленими на її бічних гранях опорами качання при об'єднанні пар координатних блоків-модулів 3 і 4 одним комплектом жорстких трубчастих стрижнів 5 і 6, розміщених в паралельних площинах. Для досягнення більшої механічної жорсткості конструкції запропоновано об'єднати координатні блоки-модулі 3 і 4 в жорсткі координатні конструктиви на основі застосування двох пар жорстких трубчастих стрижнів 5 і 6, відповідно, як це показано на Фіг.6. Відповідна конструкція площадки 12, що відпрацьовує заданий рух по довільній плоскій траєкторії і несе по дві пари опор качання для кожного координатного напряму, показана на фігурах 7 і 8. На фігурі 9 показана підлогова установка двокоординатного електромеханічного тренажера стрільця у вигляді спереду. Нерухомі путні структури 1 і 2 координатних напрямів X і Y, відповідно, жорстко встановлені на підлозі 13. Рухомі блокимодулі відповідних координатних напрямів 3 і 4 через координатні трубчасті стрижні 5 і 6, на Фіг.9 не показані. Мають кінематичний зв'язок з площадкою 7, на якій фіксується тренований боєць і що відпрацьовує рух по заданій траєкторії А із заданими системою управління швидкостями і прискореннями. На фігурах 10 і 12 представлена стельова або портальна конструкція пропонованого двокоординатного тренажера стрільця. Тут путні структури 1 і 2 координатних напрямів X і Υ приводного двокоординатного лінійного електричного двигуна тренажера жорстко закріплені на металевій пластині 14, у свою чергу жорстко укріпленою на стельовій балці або горизонтальній балці 15 порталу. Рухома площадка 7, що відпрацьовує задане системою управління переміщення тренованого бійця, за допомогою системи жорстких стрижнів або гнучких ременів 16, що імітують стропи парашута, пов'язана з додатковою платформою 17, на якій фіксується під час тренування випробовуваний стрілець. На фігурах 11 і 13 представлена стельова або портальна конструкція пропонованого двокоорди 91298 8 натного тренажера стрілка, в якій для полегшення проведення монтажних робіт двокоординатний лінійний електричний привід закріплений на металевій стельовій пластині 14 за допомогою проміжної металевої пластини 18, що несе постійні магніти, на фігурах 11 і 13 не показаних. Очевидно, що в цьому випадку металеві пластини 14 і 18 повинні бути виконані з феромагнетику, наприклад, із сталі. З метою подальшого підвищення функціональних можливостей пропонованого двокоординатного тренажера стрільця запропоновано встановити, як це показано на Фіг.14, на площадці 7 або 12 додаткову горизонтальну платформу 19, що обертається навколо вертикальної осі, встановлену на площадці 7 або 12 на опорній вальниці 20 і що приводиться в обертання ротором 21 електричного двигуна 22, закріпленого на вертикальній осі площадки 7 або 12. Пропонований двокоординатний електромеханічний тренажер стрільця працює таким чином. При подачі сигналу системи управління, яка не є предметом наведеного винаходу і тому на кресленнях, що ілюструють суть пропонованого винаходу не показана, на якірні обмотки управління, наприклад, пари рухомих координатних блоківмодулів 3 координатного напряму X, жорстко об'єднаних в координатний конструктив цього напряму 5, напрям яких співпадає з напрямом другого координатного напряму Y, рухома площадка 7(12) (див. фігури 1 і 6) відпрацює переміщення уздовж осі X, оскільки вона має можливість вільного руху на опорах качання, закріплених на площадці 7(12), по 6. Очевидно, що повністю аналогічним чином відбудеться відробіток площадкою 7(12) координатного завдання системи управління при подачі сигналів, що управляють, на якірні обмотки управління пари рухомих блоків-модулів 4, об'єднаних в координатний конструктив координатного напряму Y. В цьому випадку площадка 7(12), що відпрацьовує координатне завдання, переміщатиметься в координатному напрямі Y, вільно переміщаючись закріпленими на площадці 7(12) опорами качання по жорстких х 5, об'єднуючих в координатний конструктив пару рухомих блоківмодулів 3 і направлених паралельно координатній осі Υ. Природно, що якщо провести одночасну подачу імпульсів, що управляють, на якірні обмотки управління двох пар координатних конструктивів координатних напрямів X і Υ, то площадка 7(12) почне переміщатися у напрямі вектора сумарної швидкості. Отже, програмуючи рух площадці 7(12) із заданими швидкостями і прискореннями по заданій траєкторії А або В, можна забезпечити переміщення тренованого бійця, який із стрілецькою зброєю повинен бути зафіксований на площадці 7(12) або платформі 19, що обертається. Завдяки запропонованих конструктивних виконань двокоординатного електромеханічного тренажера стрільця може бути реалізований в практиці тренування стрільців виключно широкий спектр завдань, що дає можливість значного під 9 вищення ефективності їх бойової підготовки в сти 91298 слі терміни. 10 11 91298 12 13 91298 14 15 Комп’ютерна верстка Л.Литвиненко 91298 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-coordinate electro-mechanical riflemans simulator
Автори англійськоюPopovichenko Oleksandr Viktorovych, Tolstoi Oleksii Volodymyrovych, Belikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych, Hrachov Mykola Mykolaiovych, Yarmoliuk Vadym Mykhailovych
Назва патенту російськоюДвухкоординатный электромеханический тренажер стрелка
Автори російськоюПоповиченко Александр Викторович, Толстой Алексей Владимирович, Беликов Виктор Трифонович, Васильев Валерий Валентинович, Грачов Николай Николаевич, Ярмолюк Вадим Михайлович
МПК / Мітки
МПК: F41G 3/26, F41A 33/00, H02K 41/00, F41G 5/00, A63B 24/00, F41G 3/30
Мітки: стрільця, електромеханічний, двокоординатний, тренажер
Код посилання
<a href="https://ua.patents.su/8-91298-dvokoordinatnijj-elektromekhanichnijj-trenazher-strilcya.html" target="_blank" rel="follow" title="База патентів України">Двокоординатний електромеханічний тренажер стрільця</a>
Універсальний електромеханічний тренажер веслярів
Номер патенту: 90069
Опубліковано: 25.03.2010
Автори: Толстой Олексій Володимирович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович
МПК: A63B 69/06, A63B 69/00
Мітки: універсальний, тренажер, електромеханічний, веслярів
Формула / Реферат:
1. Універсальний електромеханічний тренажер веслярів, що складається з основи, на якій встановлені нерухомо або з можливістю подовжнього переміщення робочі місця-каретки для розміщення одного весляра, що тренується, або команди веслярів, що тренуються, і вузол навантаження у вигляді одного або декількох автономних генераторів регульованого електромагнітного зусилля навантаження, який відрізняється тим, що кожен з елементів вузла навантаження...
Електромеханічний тренажер для спорту та фітнесу

Номер патенту: 86557
Опубліковано: 27.04.2009
Автори: Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Васильєв Валерій Валентинович, Толстой Олексій Володимирович
МПК: A63B 22/00, A63B 24/00, A63B 23/04
Мітки: тренажер, спорту, фітнесу, електромеханічний
Формула / Реферат:
1. Електромеханічний тренажер для спорту і фітнесу, що складається з генератора електромагнітного зусилля навантаження у вигляді електромеханічного перетворювача електричної енергії, рухомий елемент якого забезпечений рукоятками, що забезпечують механічний зв'язок тренажера і пацієнта, який відрізняється тим, що електромеханічний перетворювач електричної енергії, що підводиться до тренажера, виконаний у вигляді широкорегульованого лінійного...
Електромеханічний вертебральний тренажер

Номер патенту: 41708
Опубліковано: 10.06.2009
Автори: Прокопчук Юрій Олександрович, Кравченко Олександр Васильович, Кулик Анатолій Дмитрович, Авдєєв Анатолій Миколайович, Бражнікова Галина Єгорівна
МПК: A61H 1/02
Мітки: вертебральний, електромеханічний, тренажер
Формула / Реферат:
1. Електромеханічний вертебральний тренажер, що складається з корпуса та розміщених в ньому напрямної з повзуном (кареткою) і ложементом для ніг, електродвигуна з передаточним пристроєм, зв'язаним з кареткою, джерела живлення і пульта керування, який відрізняється тим, що передаточний пристрій виконаний у вигляді з'єднаних між собою за допомогою обертоперетворювача (редуктора або мультиплікатора) електродвигуна та кривошипного колеса,...
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини
Номер патенту: 49720
Опубліковано: 16.09.2002
Автори: Ярмолюк Вадим Михайлович, Бєліков Віктор Трифонович
МПК: G09B 9/04
Мітки: силовий, тренажера, блок, багатокоординатного, гусеничної, машини, електромеханічний
Формула / Реферат:
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини, що містить основу, на якій встановлений двокоординатний електричний привід горизонтальних переміщень та обертів з опорною платформою трьох розташованих симетрично по колу механізмів вертикального підйому, на кінцевих опорних вузлах яких шарнірно закріплена верхня площадка з кабіною, в якій знаходиться місце оператора, який відрізняється тим, що на шляховій...
Силовий тренажер

Номер патенту: 9949
Опубліковано: 17.10.2005
Автор: Барабаш Валентин Радіонович
МПК: A63B 21/00, A63B 21/06
Формула / Реферат:
Силовий тренажер містить два незалежних робочих пристрої, корпус, виготовлений як модель "стілець", який відрізняється тим, що має робочий важіль, закріплений шарнірно на розбірній рамі під кутом 40°, яка фіксується на корпусі, з можливістю прямолінійного руху в прямому і зворотному напрямках, з можливістю розтягування гумових кілець з камери легкового автомобіля, закріплених на пальцях робочого важеля і рами.
Попередній патент: Багатошарова листоподібна або трубоподібна харчова оболонка або харчова плівка
Наступний патент: Спосіб визначення геометричних характеристик і параметрів руху наземних об’єктів при геомоніторингу і система для його реалізації
Випадковий патент: Застосування монокристалів купрум йодиду-пентатіосилікату cu7sis5i як матеріалу мембрани іоноселективного електрода для визначення купруму в кислих розчинах