Спосіб пеленгування джерел випромінювання
Номер патенту: 93781
Опубліковано: 10.03.2011
Автори: Дем'янчук Борис Олександрович, Дем'янчук Вікторія Борисівна
Формула / Реферат
Спосіб пеленгування джерел випромінювання шляхом сканування віялоподібних променів, які протилежно нахилені і розташовані під кутом α до горизонту та перехрещуються біля поверхні грунту, формування за допомогою двох рознесених у площині кутів місця осесиметричних нерухомих відбиваючих поверхонь, нижнього параболоїдального рефлектора та верхнього зрізаноконічного трансрефлектора, піднятого на щоглі для збільшення дальності прямої видимості, спрямовування двох випромінювачів, що синхронно сканують з частотою ![]() у площині азимута уздовж лінії фокального кола параболоїдального рефлектора на протилежно нахилені ділянки цього рефлектора, так щоб сигнали, які приймаються, які відбиті від зрізаноконічного трансрефлектора, потрапляли на ці ділянки рефлектора та у випромінювачі, що сканують, посилення в приймальних каналах і детектування вихідних сигналів та визначення азимута
у площині азимута уздовж лінії фокального кола параболоїдального рефлектора на протилежно нахилені ділянки цього рефлектора, так щоб сигнали, які приймаються, які відбиті від зрізаноконічного трансрефлектора, потрапляли на ці ділянки рефлектора та у випромінювачі, що сканують, посилення в приймальних каналах і детектування вихідних сигналів та визначення азимута ![]() джерела випромінювання з урахуванням напівсуми затримок сигналів кожного із двох випромінювачів відносно часу, що відповідає початку сканування, за формулою
джерела випромінювання з урахуванням напівсуми затримок сигналів кожного із двох випромінювачів відносно часу, що відповідає початку сканування, за формулою ![]() , який відрізняється тим, що розташовують випромінювачі, що синхронно сканують вздовж фокального кола рефлектора перед щоглою та оснащують їх діелектричними лінзами для корегування фронту хвилі, так щоб створити уявний фокус кожного випромінювача на фокальному колі позад щогли, здійснюють одночасне порівняння та амплітудне пеленгування сигналів, що приймаються, шляхом одержання суми вихідних сигналів чотирьох парціальних приймальних каналів, якими попередньо оснащують кожний випромінювач, а також шляхом одержання різниць сигналів цих каналів у відповідних площинах азимута і кута місця, затримують сумарний сигнал за фазою на кут
, який відрізняється тим, що розташовують випромінювачі, що синхронно сканують вздовж фокального кола рефлектора перед щоглою та оснащують їх діелектричними лінзами для корегування фронту хвилі, так щоб створити уявний фокус кожного випромінювача на фокальному колі позад щогли, здійснюють одночасне порівняння та амплітудне пеленгування сигналів, що приймаються, шляхом одержання суми вихідних сигналів чотирьох парціальних приймальних каналів, якими попередньо оснащують кожний випромінювач, а також шляхом одержання різниць сигналів цих каналів у відповідних площинах азимута і кута місця, затримують сумарний сигнал за фазою на кут ![]() , здійснюють амплітудно-фазове детектування добутку затриманого за фазою сумарного і різницевого сигналів в кожній координатній площині, після чого посилюють отримані результати детектування за допомогою логарифмічних посилювачів, обчислюють модуль різниці логарифмів і порівнюють його з сигналом порогу, що є обернено пропорційним допустимому рівню ймовірності помилкової тривоги щодо виявлення запуску протилокаційних ракет, наносять попередньо на поверхню грунту довкола пеленгатора на відстані від нього, яка перевищує в 10 разів радіус ураження пеленгатора ракетою, смугу піноутворюючої суспензії шириною від 25 до 30 м з поверхневим наповнювачем у вигляді дисперсного порошку легких металів, нахиляють промені пеленгатора до грунту шляхом нахилу зрізаноконічного трансрефлектора на кут
, здійснюють амплітудно-фазове детектування добутку затриманого за фазою сумарного і різницевого сигналів в кожній координатній площині, після чого посилюють отримані результати детектування за допомогою логарифмічних посилювачів, обчислюють модуль різниці логарифмів і порівнюють його з сигналом порогу, що є обернено пропорційним допустимому рівню ймовірності помилкової тривоги щодо виявлення запуску протилокаційних ракет, наносять попередньо на поверхню грунту довкола пеленгатора на відстані від нього, яка перевищує в 10 разів радіус ураження пеленгатора ракетою, смугу піноутворюючої суспензії шириною від 25 до 30 м з поверхневим наповнювачем у вигляді дисперсного порошку легких металів, нахиляють промені пеленгатора до грунту шляхом нахилу зрізаноконічного трансрефлектора на кут ![]() , так щоб ефективна відбиваюча поверхня частини смуги з металевим порошком, яку опромінюють за допомогою нижнього краю променів, що перехрещуються, була суттєво більшою, ніж ефективна відбиваюча поверхня зрізаноконічного трансрефлектора, а кут місця джерела визначають за напіврізницею затримок за часом на
, так щоб ефективна відбиваюча поверхня частини смуги з металевим порошком, яку опромінюють за допомогою нижнього краю променів, що перехрещуються, була суттєво більшою, ніж ефективна відбиваюча поверхня зрізаноконічного трансрефлектора, а кут місця джерела визначають за напіврізницею затримок за часом на ![]() ,
, ![]() сумарних сигналів з виходу приймальних каналів кожного із двох випромінювачів, з урахуванням кута нахилу зрізаноконічного трансрефлектора (
сумарних сигналів з виходу приймальних каналів кожного із двох випромінювачів, з урахуванням кута нахилу зрізаноконічного трансрефлектора (![]() ), за формулою
), за формулою ![]() .
.
Текст
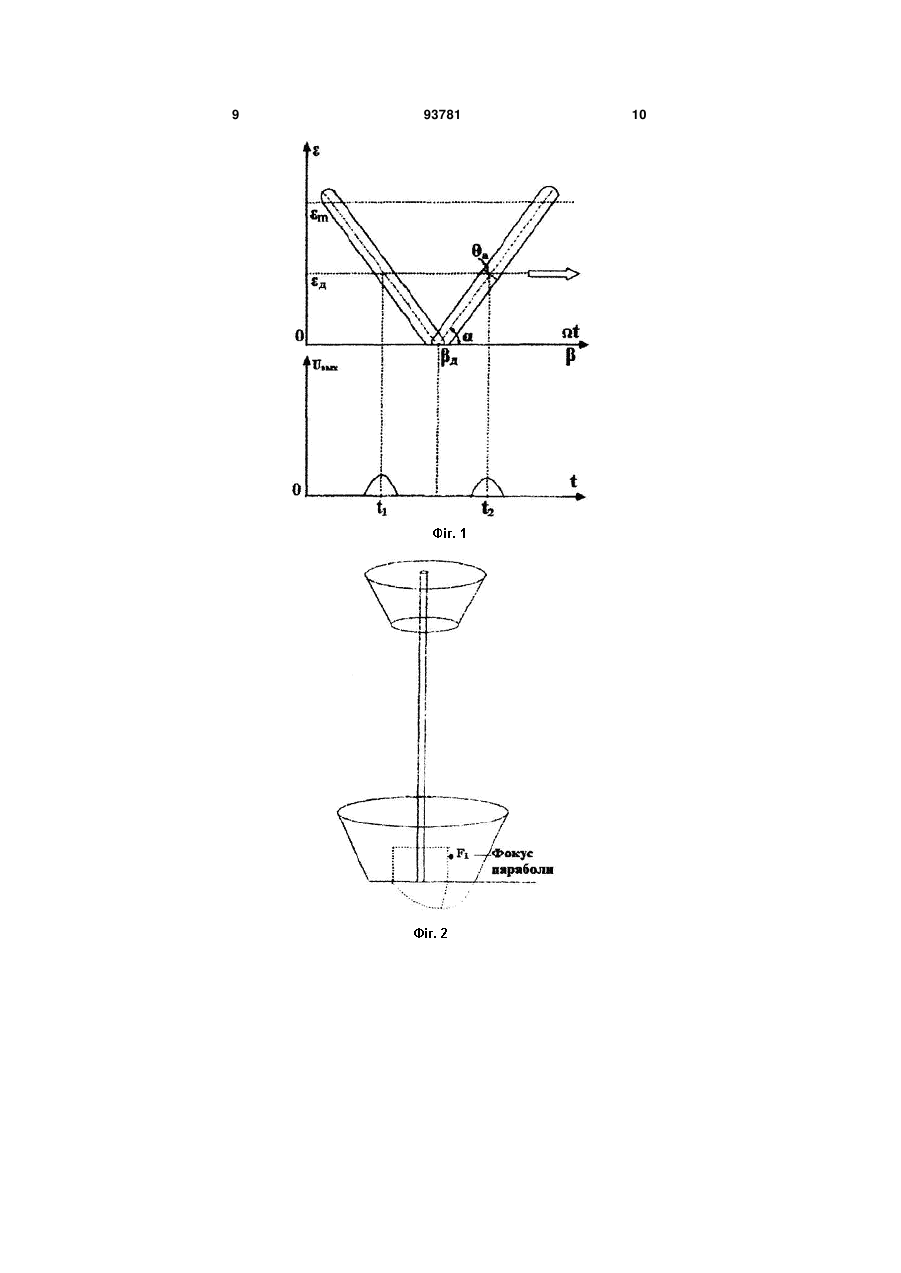
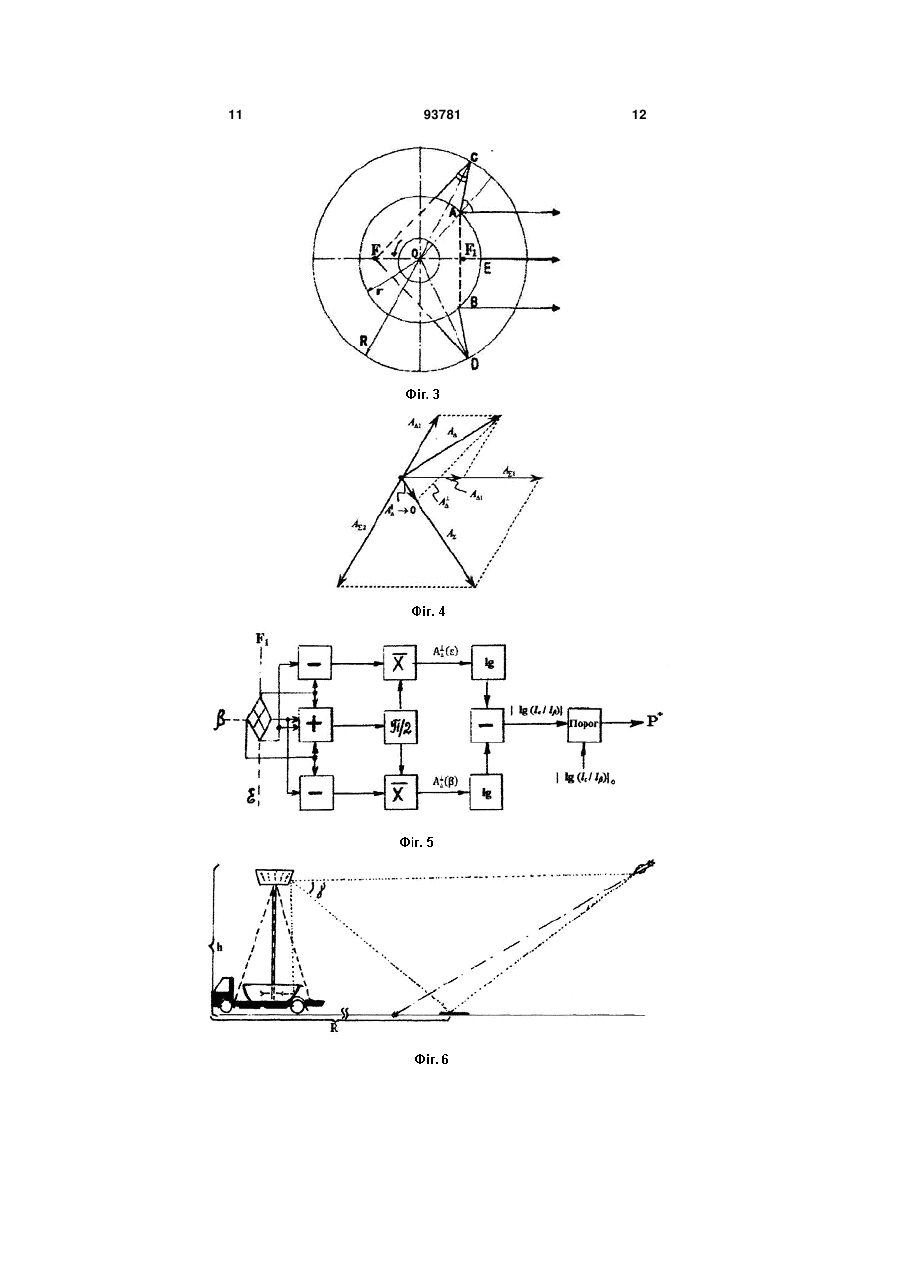
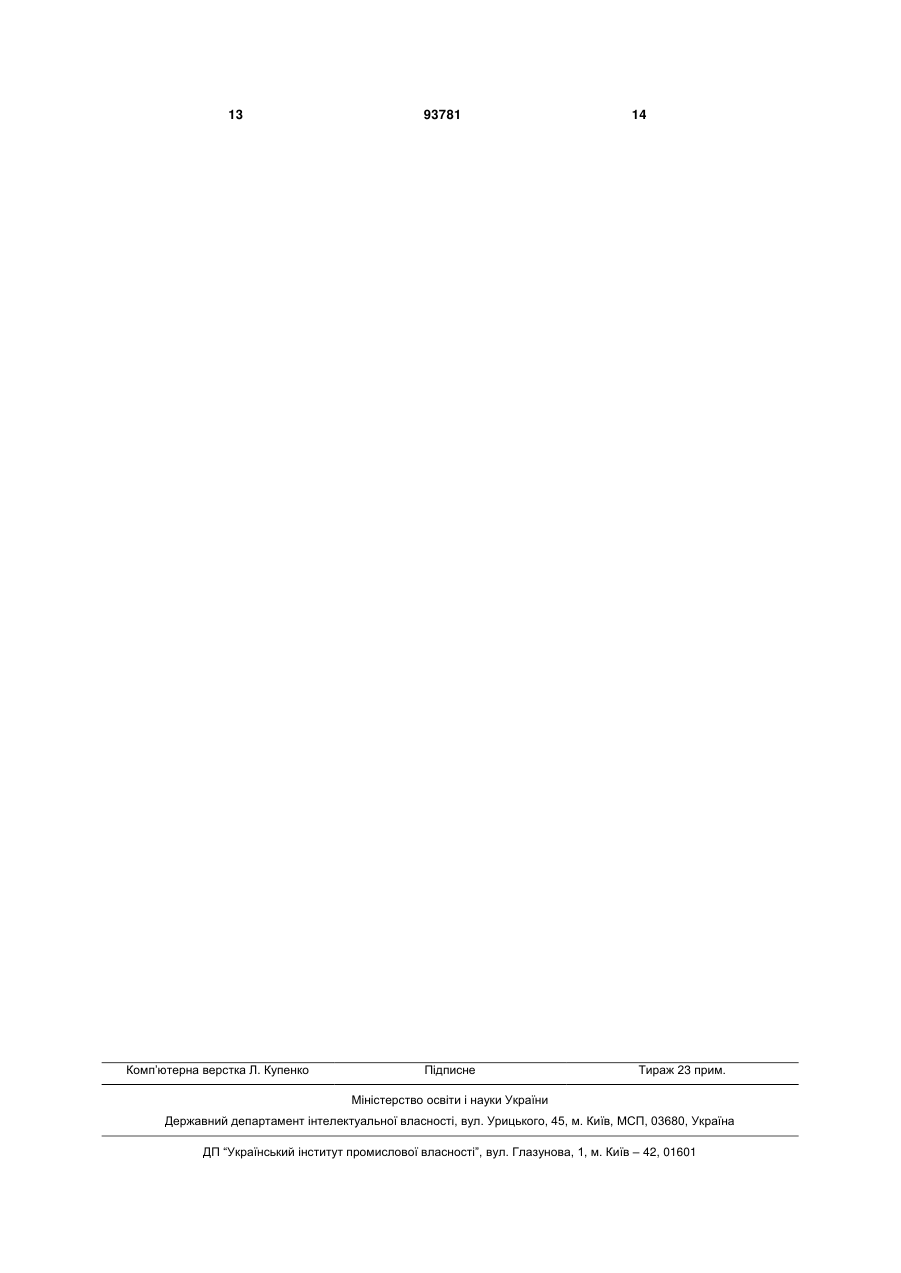
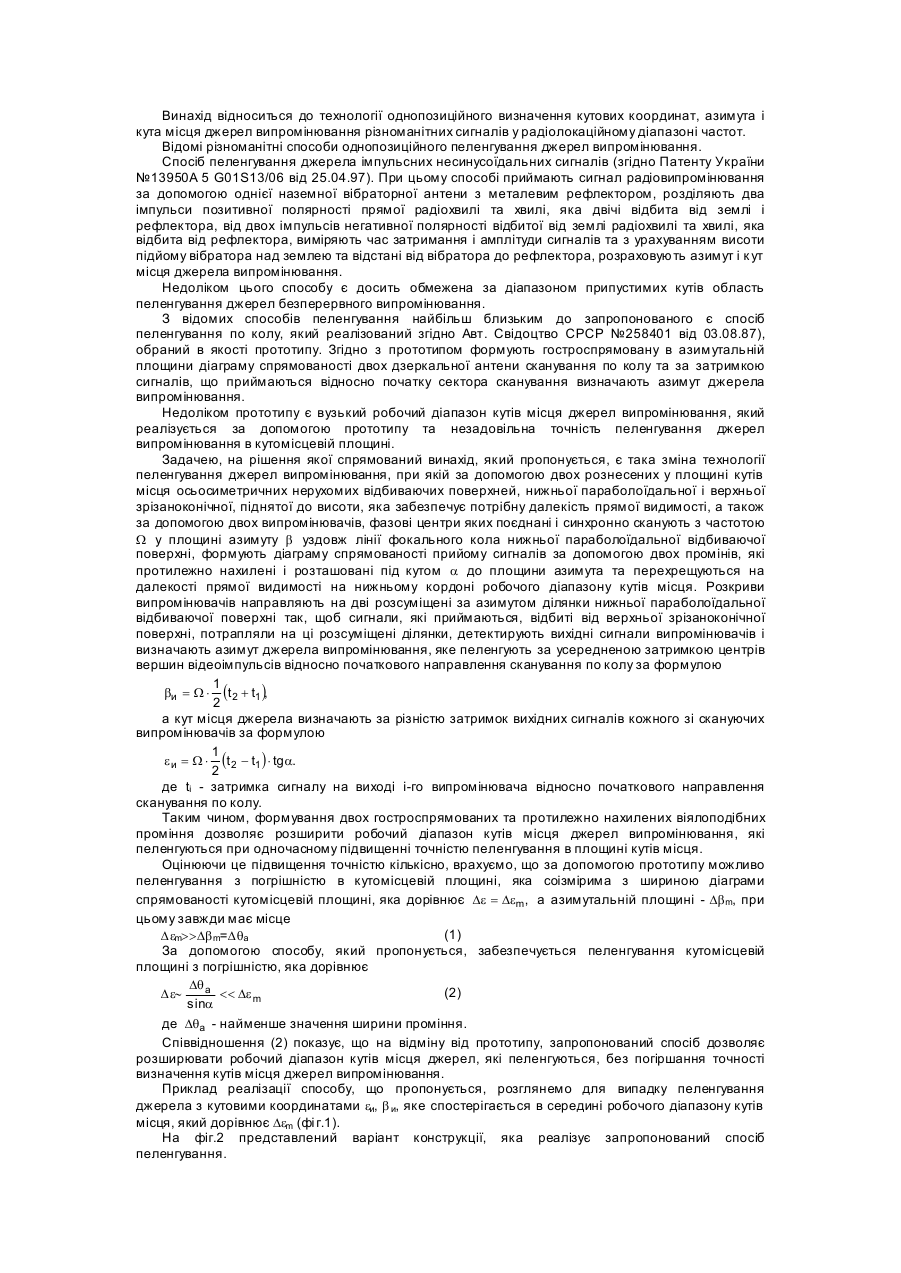
Спосіб пеленгування джерел випромінювання шляхом сканування віялоподібних променів, які протилежно нахилені і розташовані під кутом α до горизонту та перехрещуються біля поверхні ґрунту, формування за допомогою двох рознесених у площині кутів місця осесиметричних нерухомих відбиваючих поверхонь, нижнього параболоїдального рефлектора та верхнього зрізаноконічного трансрефлектора, піднятого на щоглі для збільшення дальності прямої видимості, спрямовування двох випромінювачів, що синхронно сканують з частотою у площині азимута уздовж лінії фокального кола параболоїдального рефлектора на протилежно нахилені ділянки цього рефлектора, так щоб сигнали, які приймаються, які відбиті від зрізаноконічного трансрефлектора, потрапляли на ці ділянки рефлектора та у випромінювачі, що сканують, посилення в приймальних каналах і детектування вихідних сигналів та визначення азимута джерела випромінювання з урахуванням напівсуми затримок сигналів кожного із двох випромінювачів відносно часу, що відповідає початку сканування, за формулою ( t1 t 2 ) / 2 , який відрізняється тим, що розташовують випромінювачі, що синхронно сканують вздовж фокального кола рефлектора перед щоглою та оснащують їх C2 2 (19) 1 3 локаційних ракет і розташування центру випромінювання на металевій щоглі. Відомі різноманітні способи однопозиційного пеленгування джерел випромінювання. Спосіб пеленгування джерела імпульсних несинусоїдальних сигналів (відповідно до Патенту України №3950А 5 G01S13/06 від 25.04.97). При цьому способі приймають сигнал радіовипромінювання за допомогою однієї наземної вібраторної антени з металевим рефлектором, розділяють два імпульси позитивної полярності прямої радіохвилі та хвилі, яка двічі відбита від землі і рефлектора, від двох імпульсів негативної полярності, відбитої від землі радіохвилі та хвилі, яка відбита від рефлектора, виміряють час затримання і амплітуди сигналів та з урахуванням висоти підйому вібратора над землею та відстані від вібратора до рефлектора, розраховують азимут і кут місця джерела випромінювання. Недоліком цього способу є досить обмежена за діапазоном припустимих кутів область пеленгування джерел випромінювання та низька стійкість пеленгування під час дії протилокаційних ракет. Спосіб пеленгування по колу, який реалізований (згідно Авт. Свід. СРСР №258401 від 03.08.87). Згідно цьому способу формують гостроспрямовану в азимутальній площині діаграму спрямованості двохдзеркальної антени сканування по колу та за затримкою сигналів, що приймаються відносно початку сектора сканування, визначають азимут джерела випромінювання. Кут місця джерела можливо визначати за різницею фаз сигналів в приймальних каналах двохдзеркальної антени. Недоліком цього способу є також низька стійкість пеленгування джерела під час наявності в проміні пеленгатора протилокаційної ракети, що наводиться на його центр випромінювання. З відомих способів пеленгування найбільш близьким до запропонованого є спосіб пеленгування джерел випромінювання (згідно Патенту України №69553А 7 G01S13/06 від 15.09.2004. Бюл. №9.2004 p.), що обраний в якості прототипу. Згідно прототипу, для визначення кутових координат джерел випромінювання, сканують у просторі за допомогою двох віялоподібних промінів, що протилежно нахилені і розташовані під кутом до горизонту та перехрещуються біля поверхні грунту, формують проміні за допомогою двох рознесених у площині кутів місця, осесиметричних нерухомих відбиваючих поверхонь, нижнього параболоїдального рефлектора та верхнього зрізаноконічного трансрефлектора, піднятого на щоглі для збільшення дальності прямої видимості, спрямовують два випромінювача, що синхронно сканують з частотою у площині азимуту уздовж лінії фокального кола параболоїдального рефлектора, на протилежно нахилені ділянки цього рефлектора, так щоб сигнали, яки приймаються, що відбиті від зрізаноконічного трансрефлектора, потрапляли на ці ділянки рефлектора та у випромінювачі, що сканують, посилюють в приймальних каналах і детектують вихідні сигнали та визначають азимут і кут місця є джерела випромінювання з урахуванням затримок за часом на t1 , t 2 сигналів 93781 4 кожного із двох випромінювачів відносно часу, що відповідає початку сканування, за формулами: ( t1 t 2 ) / 2 ; [ t 2 t 1 ) tg ] / 2 Недоліком прототипу є недостатня стійкість пеленгування джерел випромінювань під час дії в проміні пеленгатора протилокаційних ракет, що наводяться на його центр випромінювання, який є піднятим на металевій щоглі, тому що ці ракети запам'ятовують випромінювання пеленгатора на період Його сканування. Крім того, застосування металевої щогли для піднімання трансрефлектора викликає просторовий затінок випромінювань. Це зменшує потужність сигналів, під час їх передачі та приймання, а саме, зменшує стійкість пеленгування джерел випромінювань, коли вони мають слабку потужність. Задачею, на рішення якої спрямований винахід, що пропонується, є така зміна технології пеленгування джерел випромінювання, при якої можливо підвищення стійкості пеленгування, тобто однопозиційного визначення координат азимута і кута місця джерела, шляхом своєчасного виявлення запуску протилокаційних ракет і відвертання їх на підстильну поверхню грунту, виключення затінку випромінювань через щоглу за допомогою розташування випромінювачів, що сканують, перед щоглою. Для вирішення цієї задачі шляхом сканування віялоподібних промінів, що протилежно нахилені і розташовані під кутом до горизонту та перехрещуються біля поверхні грунту, формування за допомогою двох рознесених у площині кутів місця, осесиметричних нерухомих відбиваючих поверхонь, нижнього параболоїдального рефлектора та верхнього зрізаноконічного трансрефлектора, піднятого на щоглі для збільшення дальності прямої видимості, спрямовання двох випромінювачів, що синхронно сканують з частотою у площині азимуту уздовж лінії фокального кола параболоїдального рефлектора, на протилежно нахилені ділянки цього рефлектора, так щоб сигнали, яки приймаються, що відбиті від зрізаноконічного трансрефлектора, потрапляли на ці ділянки рефлектора та у випромінювачі, що сканують, посилення в приймальних каналах і детектування вихідних сигналів та визначення азимуту джерела випромінювання з урахуванням напівсуми затримок за часом на t1, t2 сигналів кожного із двох випромінювачів відносно часу, що відповідає початку сканування, за формулою ( t1 t 2 ) / 2 , згідно винаходу розташовують випромінювачі, що синхронно сканують вздовж фокального кола рефлектора, перед щоглою та оснащують їх діелектричними лінзами для корегування фронту хвилі, так щоб уявний фокус кожного випромінювача створити на фокальному колі позад щогли, здійснюють одночасне порівняння та амплітудне пеленгування сигналів, що приймаються, шляхом одержання суми вихідних сигналів чотирьох парціальних приймальних каналів, якими попередньо оснащують кожний випромінювач, а також шляхом одержання різниць сигналів цих каналів у відповідних площинах азимута і кута місця, затримують сумарний сигнал за фазою на кут / 2 , здійснюють амплітудно-фазове 5 детектування добутку затриманого за фазою сумарного і різницького сигналів в кожній координатній площині, після чого посилюють отримані результати детектування за допомогою логарифмічних посилювачів, обчислюють модуль різниці логарифмів і порівнюють його з сигналом порогу, що є обернено пропорційним допустимому рівню ймовірності помилкової тривоги щодо виявлення запуску протилокаційних ракет, наносять попередньо на поверхню грунту довкола пеленгатора на відстані від нього, яка перевищує в 10 разів радіус ураження пеленгатора ракетою, смугу піноутворюючої суспензії шириною 25-30 м з поверхневим наповнювачем у вигляді дисперсного порошку легких металів, нахиляють проміні пеленгатора до грунту, шляхом похилу зрізано конічного трансрефлектора на кут , так щоб ефективна відбиваюча поверхня частини смуги з металевим порошком, яку опромінюють за допомогою нижнього краю промінів, що перехрещуються, була суттєво більшою, ніж ефективна відбиваюча поверхня зрізаноконічного трансрефлектора, а кут місця джерела визначають за напіврізницею затримок за часом на t1 , t 2 сумарних сигналів з виходу приймальних каналів кожного із двох випромінювачів, з урахуванням кута похилу зрізаноконічного трансрефлектора, за формулою [ t 2 t1) tg ] / 2 . Наявність позитивного ефекту і конкретній приклад реалізації способу доцільно розглянути шляхом сумісного урахування суттєвих ознакоперацій, що властиві і прототипу, і винаходу. Приклад реалізації способу, що пропонується, розглянемо для випадку пеленгування джерела з кутовими координатами Д , Д , яке спостерігається в середині робочого діапазону кутів місця, що дорівнює m (Фіг.1). Вид сигналів на виході сумарного приймального каналу та їх затримки за часом на t1 , t 2 відносно початку синхронного сканування промінів з частотою . у площині азимуту зображені тут нижче. На Фіг. 2 представлено варіант загального вигляду пеленгатора, що реалізує запропонований спосіб. Для зменшення ваги і парусності та забезпечення швидкої підновленості у випадку пошкодження, зрізаноконічний трансрефлектор доцільно виготовляти у вигляді сіточної конструкції. Випромінювачі, що сканують, доцільно виготовляти у вигляді фазованої атеної решітки або конструкцій рупорного типу, що сканують механічно. Крапкою F1 внизу показано місце розташування у фокусі параболи випромінювачів перед щоглою, які сканують. Кожний має канал для випромінювання і чотири каналу приймання сигналів. Всі ці канали випромінювачів оснащені діелектричними лінзами, що корегують фронт хвилі під час її передачі та приймання. На Фіг. 3 ілюструється досягнення важливого ефекту вузькоспрямованого випромінювання в азимутальній площині після його відбиття від транс-рефлектора, який має осесиметричну опуклу поверхню. Це можливе лише за умовою корегу 93781 6 вання фронтів хвиль, під час їх розповсюдження в каналах випромінювачів, тобто через вирівнювання фронтів промінів, що улучають на протилежно нахилені ділянки параболоїдального рефлектора. При цьому уявний фокус F випромінювача виявляється розташованим на фокальному колі позад щогли. На Фіг.4 представлено векторна діаграма сумарних і різницьких сигналів (в одній конкретній координатній площині) джерела, що спостерігається, і протилокаційної ракети, яку воно запускає, а також результуючі сумарний і різницький сигнали на виході сумарно-різницького блоку пеленгатора, тобто сигнали двох об'єктів, у випадку, коли вони спостерігаються на індикаторі як єдина відмітка, подібно тому, як це наведено на нижньому графіку на Фіг.1. Взаємне розташування векторів сигналів надані на Фіг.4, під час дійсного розділення джерела в картинній площині, наприклад, на джерела 1 та 2. Векторні діаграми сумарних A i та різницьких A i (i 1,2) сигналів, а також результуюче значення сумарного A та різницького A сиг налів, надані для моменту часу, який відповідає розташуванню рівносигнального напрямку діаграми спрямованості випромінювання у просторі безпосередньо між двома об'єктами. Видно, що сигнал A в цієї ситуації, коли рівносигнальний напрямок діаграми спрямованості виявляється між цими об'єктами, обов'язково мас складову, що ортогональна сигналу A . Тому операція амплітудно-фазового детектування добутку у вигляді X( t ) A [ t /( 2)] A ( t ) , (1) де A ( t ) U1 cos(t 1) U2 cos(t 2 ); A ( t ) 1 U1 cos(t 1) 2 U2 cos(t 2 ) , (2) дозволяє миттєво, точніше, коли кутовий розмір пари ще не перевищую десяту частину ширини діаграми спрямованості пеленгатора (наприклад, 12 кутових хвилин, за умовою, що ширина діаграми спрямованості дорівнює =2° а відношення сигнал/шум дорівнює 10), одержувати сигнал просторового розділення джерела в координатній площині азимута або кута місця у вигляді ортогональних кутових помилок, що пропорційні кутовій сумі модулів відхилень 1 , 2 джерел від рівносигнального напряму у просторі спостереження пеленгатора та добутку амплітуд Ui (i 1,2) сигналів джерел. Амплітуди цих ортогональних кутових помилок у відповідних координатних площинах після амплітудно-фазового детектування (1) з урахуванням (2) дорівнюють: A () U1 U2 ; A () U1 U2 (3) Кутові взаємні відстані А джерел пропорційні геометричним розмірам l , l пари джерел у відповідних координатних площинах та обернено 7 пропорційні їх відстані від пеленгатора R , тобто l / R . Тому після операцій логарифмування ортогональних помилок (3), модуль різниці логарифмів (сигнал виявлення просторового розділення джерела через запуск протилокаційної ракети) дорівнює асиметрії пари джерел в картинній площині у вигляді P* lg( l / l ) , (4) тобто залежить лише від найбільш інформативного параметра в ситуації просторового розділення цього джерела на два джерела. Цей параметр не залежить від відстані R до джерел і не залежить від добутку U1 U2 , який визначається потужністю випромінювань джерел або сигналів відбиття від об'єктів, які спостерігаються у всієї верхній на півсфері. На Фіг. 5 показано варіант стикування парціальних приймальних каналів одного з випромінювачів, що сканує, із блоком, що реалізує операції для своєчасного виявлення просторового розділення джерела, яке спостерігається на екрані пеленгатора у вигляді однієї відмітки, тобто класично не є розділеним. Функції елементів блоку є звичайно відомими, вони визначені формулою винаходу, тому не вимагають докладного пояснення. На Фіг. 6 умовно зображено взаємне розташування пеленгатора, трансрефлектор якого є піднятим на металевій щоглі на висоту h=30 м і має похил на кут =1,7°, тому що в умовах прикладу, коли відстань до смуги, наприклад, R=1000м, 30/1000 радіан, тобто 1,7°, та смуги піноутворюючої суспензії (на основі натрія лаурінокислого С12Н23NаО2 та ундеканола С11Н24О у рівних частинах) шириною 25м з поверхневим наповнювачем у вигляді дисперсного порошку алюмінію. Смуга розташована на поверхні грунту довкола пеленгатора. Протилокаційна ракета, що діє на будь-якої висоті та великій відстані, автоматично наводиться із міжперіодним запам'ятовуванням одночасно на пару відбиваючих поверхонь: смуги і трансрефлектора. Стійкість пеленгування, в умовах дії протилокаційної ракети, залежить від точності її автоматичного наведення на пеленгатор. Помилки автоматичного наведення протилокаційної ракети на пеленгатор згідно прототипу 93781 8 п винаходу в обчислемо за реальними умовами. Нехай потужність сигналу прямого випромінювання пеленгатора в напрямку на ракету дорівнює Po. Відносна потужність сигналів відвертання протилокаційних ракет на підстильну поверхню грунту для винаходу (Pв / Po 3 ) більше в порівнянні з прототипом, приблизно, у 15 разів, тобто (Pп / Po 1/ 5) . Тому за умовою автоматичного наведення протилокаційної ракети на пару поверхонь (трансрефлектор + відбиваюча смуга згідно винаходу; трансрефлектор + грунт навколо пеленгатора згідно прототипу) з кутовим розміром пари, який спостерігає бортова система наведення ракети, отримаємо помилки наведення ракети на пеленгатор у вигляді п /(1 Po / Pп ) / 6 ; в /(1 Po / Pв ) / 1,33 За умовами прикладу місце наведення, а саме, підриву протилокаційної ракети знаходиться на відстані від пеленгатора: для прототипу (180м), для винаходу (820м). В результаті помилка небезпечного наведення ракети на пеленгатор, під час застосування винаходу, збільшується в 4,6 разів, тому стійкість пеленгування, через своєчасне виявлення запуску протилокаційних ракет і відвертання їх на підстильну поверхню грунту із смугою, в цих умовах збільшується суттєво. Додаткове збільшення стійкості пеленгування, у випадку спостереження слабких сигналів або сигналів від об'єктів, що є малорозмірними і діють на занадто малій висоті, здійснюється під час застосування винаходу, шляхом виключення затінку випромінювань через металеву щоглу за допомогою розташування випромінювачів, що сканують, перед щоглою та оснащені діелектричними лінзами для корегування фронту хвилі. Таким чином, можливість реалізації запропонованого способу, його корисність, що визначається сукупністю суттєвих ознак винаходу, і його переваги в порівнянні з прототипом, вважаються такими, що є доказаними. В зв'язку з цим автори просять розглянути надані матеріали Заявки та прийняти позитивне рішення про видачу Патенту України на винахід. 9 93781 10 11 93781 12 13 Комп’ютерна верстка Л. Купенко 93781 Підписне 14 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for emitter location
Автори англійськоюDemianchuk Borys Oleksandrovych, Demianchuk Viktoria Borysivna
Назва патенту російськоюСпособ пеленгации источников излучения
Автори російськоюДемьянчук Борис Александрович, Демьянчук Виктория Борисисовна
МПК / Мітки
МПК: G01S 13/06
Мітки: пеленгування, спосіб, випромінювання, джерел
Код посилання
<a href="https://ua.patents.su/7-93781-sposib-pelenguvannya-dzherel-viprominyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб пеленгування джерел випромінювання</a>
Спосіб пеленгування джерел випромінювання
Номер патенту: 69553
Опубліковано: 15.09.2004
Автори: Дем'янчук Борис Олександрович, Буренков Дмитро Олександрович
МПК: G01S 13/06, G01S 13/00
Мітки: випромінювання, джерел, пеленгування, спосіб
Формула / Реферат:
Спосіб пеленгування джерел випромінювання шляхом сканування віялоподібних променів, детектування прийнятих радіосигналів та визначення напрямків їхнього надходження за максимумом їхньої інтенсивності, який відрізняється тим, що за допомогою двох рознесених у площині кутів місця осесиметричних нерухомих відбиваючих поверхонь, нижньої параболоїдальної і верхньої зрізаноконічної, піднятої до висоти, яка забезпечує потрібну дальність прямої...
Спосіб визначення однакового рівня концентрації аероіонів від двох розсіювальних джерел аероіонного випромінювання
Номер патенту: 48805
Опубліковано: 12.04.2010
Автори: Строкань Оксана Вікторівна, Івженко Олександр Васильович, Чураков Анатолій Якович
Мітки: розсіювальних, спосіб, аероіонів, рівня, джерел, визначення, однакового, аероіонного, двох, випромінювання, концентрації
Формула / Реферат:
Спосіб визначення однакового рівня концентрації аерофонів від двох розсіювальних джерел аероіонного випромінювання, що полягає у визначенні відстаней від розсіювальних джерел аероіонного випромінювання, який відрізняється тим, що визначення відстаней від двох розсіювальних джерел аероіонного випромінювання відбувається одночасно.
Спосіб визначення однакового рівня концентрації аероіонів від джерел направленого випромінювання
Номер патенту: 54458
Опубліковано: 10.11.2010
Автори: Івженко Олександр Васильович, Строкань Оксана Вікторівна, Чураков Анатолій Якович
Мітки: визначення, джерел, однакового, концентрації, направленого, рівня, випромінювання, спосіб, аероіонів
Формула / Реферат:
Спосіб визначення однакового рівня концентрації аероіонів від джерел направленого випромінювання, що полягає у визначенні відстаней від джерел направленого аероіонного випромінювання, який відрізняється тим, що визначення відстаней від двох джерел направленого аероіонного випромінювання відбувається одночасно з урахуванням висоти підвісу джерел.
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 43433
Опубліковано: 17.12.2001
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: пасивна, джерел, вимірювання, система, випромінювання, координат
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька, як мінімум дві, просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї введені додатково на кожну пеленгаторну станцію лічильник, накопичуючий суматор, подільник, дешифратор, постійний запам'ятовуючий пристрій (ПЗП), схема...
Спосіб локації джерел випромінювання і пристрій для його здійснення
Номер патенту: 89309
Опубліковано: 11.01.2010
Автори: Слютенко Владислав Ігорович, Ріділа Олександр Степанович, Плита Олександр Андрійович, Черняк Сергій Іванович
Мітки: здійснення, джерел, пристрій, спосіб, локації, випромінювання
Формула / Реферат:
1. Спосіб локації джерел випромінювання, що включає визначення зміщень точок відліку пеленгів при скануванні реперних джерел випромінювання нашоломного візирного пристрою багатогранними скануючими призмами оптико-локаційних блоків і врахування їх при визначенні кутів орієнтації лінії візування, який відрізняється тим, що після обчислення зміщень точок відліку пеленгів орієнтують нашоломний візирний пристрій таким чином, щоб його лінія...
Попередній патент: Спосіб та установка для виробництва ректифікованого етилового спирту
Наступний патент: Спосіб проведення електронної лотереї
Випадковий патент: Застосування системної реконструктивної терапії як способу усунення гриж міжхребцевих дисків