Тандем машин для розкривання та підкопування трубопроводу або іншого подібного підземного об’єкта
Номер патенту: 94563
Опубліковано: 10.05.2011
Автори: Баланін Віталій Христофорович, Дмитриченко Микола Федорович, Кузьмінець Микола Петрович, Савенок Василь Іванович, Мусійко Володимир Данилович, Білякович Микола Олексійович
Формула / Реферат
1. Тандем машин для розкривання та підкопування трубопроводу або іншого подібного підземного об'єкта, що містить машину для розкриття трубопроводу, до складу якої входять: самохідне базове шасі; два робочі органи, які пристосовані для розроблювання траншей з обох боків труби; копір-очищувач труби від ґрунту; евакуатор розробленого ґрунту; гідросистема, виконавчі органи якої пристосовані для регулювання положення робочих органів; система автоматики, яка пристосована для контролю та регулювання положення машини відносно осі трубопроводу і відстані від робочих органів до труби, а також машину підкопувальну роторну, до складу якої входять: самохідний трубохід, пристосований для переміщення машини по трубопроводу; привідні робочі органи, у вигляді двох шнекових роторів з горизонтальною віссю обертання; кожухи-зачисники, які розміщені позаду шнекових роторів, який відрізняється тим, що машина підкопувальна роторна додатково оснащена пристроєм для евакуації ґрунту від робочих органів машини підкопувальної роторної на робочі органи машини для розкриття трубопроводу.
2. Тандем машин за попереднім пунктом, який відрізняється тим, що зазначений пристрій для евакуації ґрунту від робочих органів машини підкопувальної роторної на робочі органи машини для розкриття трубопроводу включає в себе закріплені на кожухах-зачисниках роторів додаткові кожухи-закрилки відвального типу, що пристосовані перекривати вільний простір відкопаних по боках трубопроводу траншей, та розміщені перед додатковими кожухами-закрилками привідні інтенсифікатори у вигляді лопатевих коліс, які пристосовані для сприяння евакуації ґрунту від робочих органів машини підкопувальної роторної на робочі органи машини для розкриття трубопроводу.
3. Тандем машин за будь-яким попереднім пунктом, який відрізняється тим, що він додатково оснащений пристроєм для контролю відстані між робочими органами машини для розкриття трубопроводу і машини підкопувальної роторної.
4. Тандем машин за попереднім пунктом, який відрізняється тим, що зазначений пристрій для контролю відстані включає в себе встановлені на машині підкопувальній роторній штангу та кінцевий вимикач, пристосований для аварійного зупинення машини підкопувальної роторної при контакті штанги або кінцевого вимикача із копіром-очищувачем труби від ґрунту машини для розкриття трубопроводу.
5. Тандем машин за п. 3, який відрізняється тим, що зазначений пристрій для контролю відстані включає в себе штангу, яка встановлена на машині підкопувальній роторній з можливістю контактування своїм кінцем із копіром-очищувачем труби від ґрунту машини для розкриття трубопроводу і внаслідок цього осьового лінійного переміщення проти зусилля пружини, а також елемент для контролю лінійного положення штанги.
6. Тандем машин за п. 3, який відрізняється тим, що він додатково оснащений системою для регулювання швидкості переміщення машини підкопувальної роторної та/або машини для розкриття трубопроводу таким чином, щоб стабілізувати відстань між машинами тандему у межах оптимального діапазону значень, причому до входу зазначеної системи регулювання швидкості під'єднаний зазначений пристрій для контролю відстані.
7. Тандем машин за п. 1, який відрізняється тим, що робочі органи, які пристосовані для розроблювання траншей з обох боків труби, виконані ланцюгового типу без зачисних башмаків.
8. Тандем машин за п. 1, який відрізняється тим, що як евакуатор розробленого ґрунту машини для розкриття трубопроводу використано конвеєр.
Текст
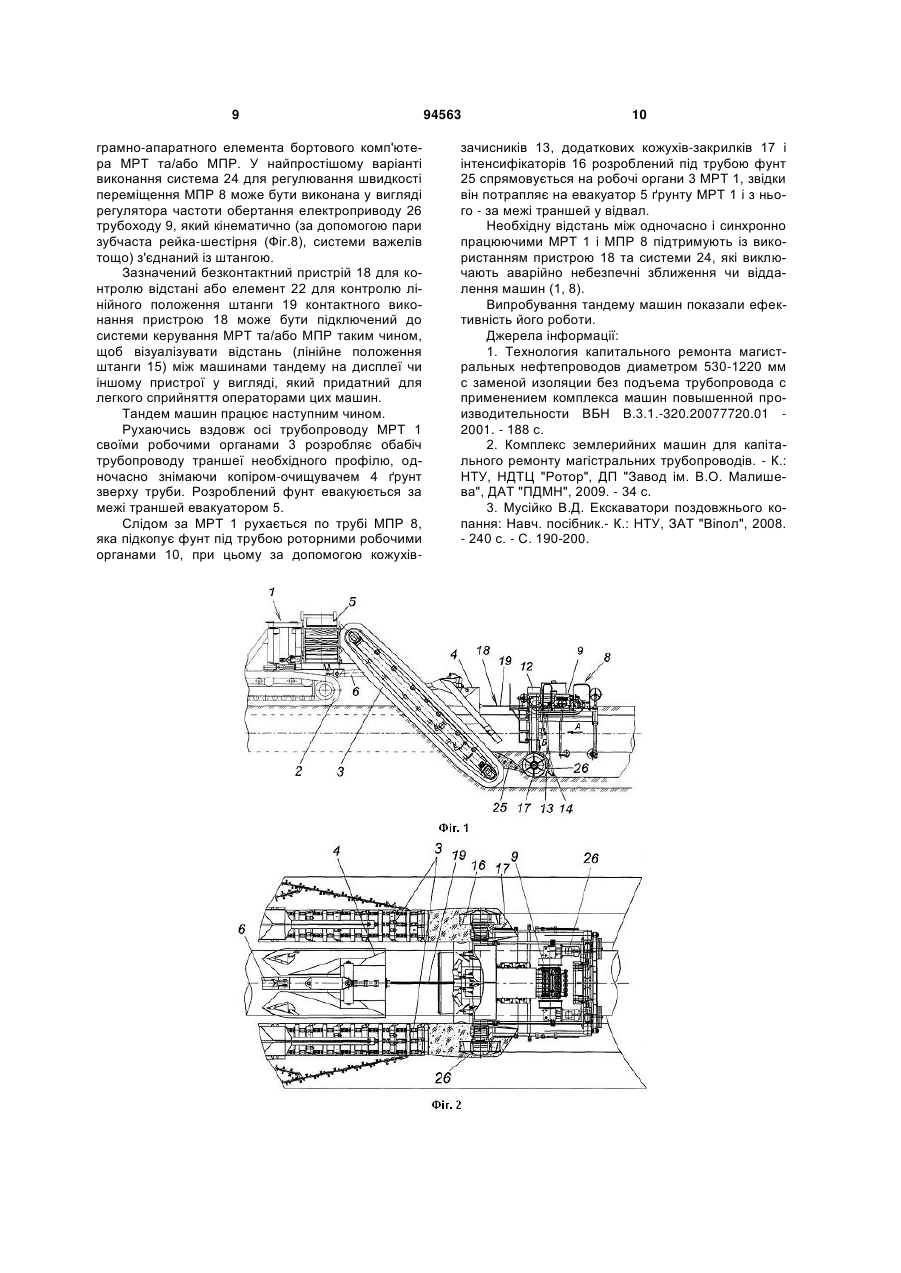
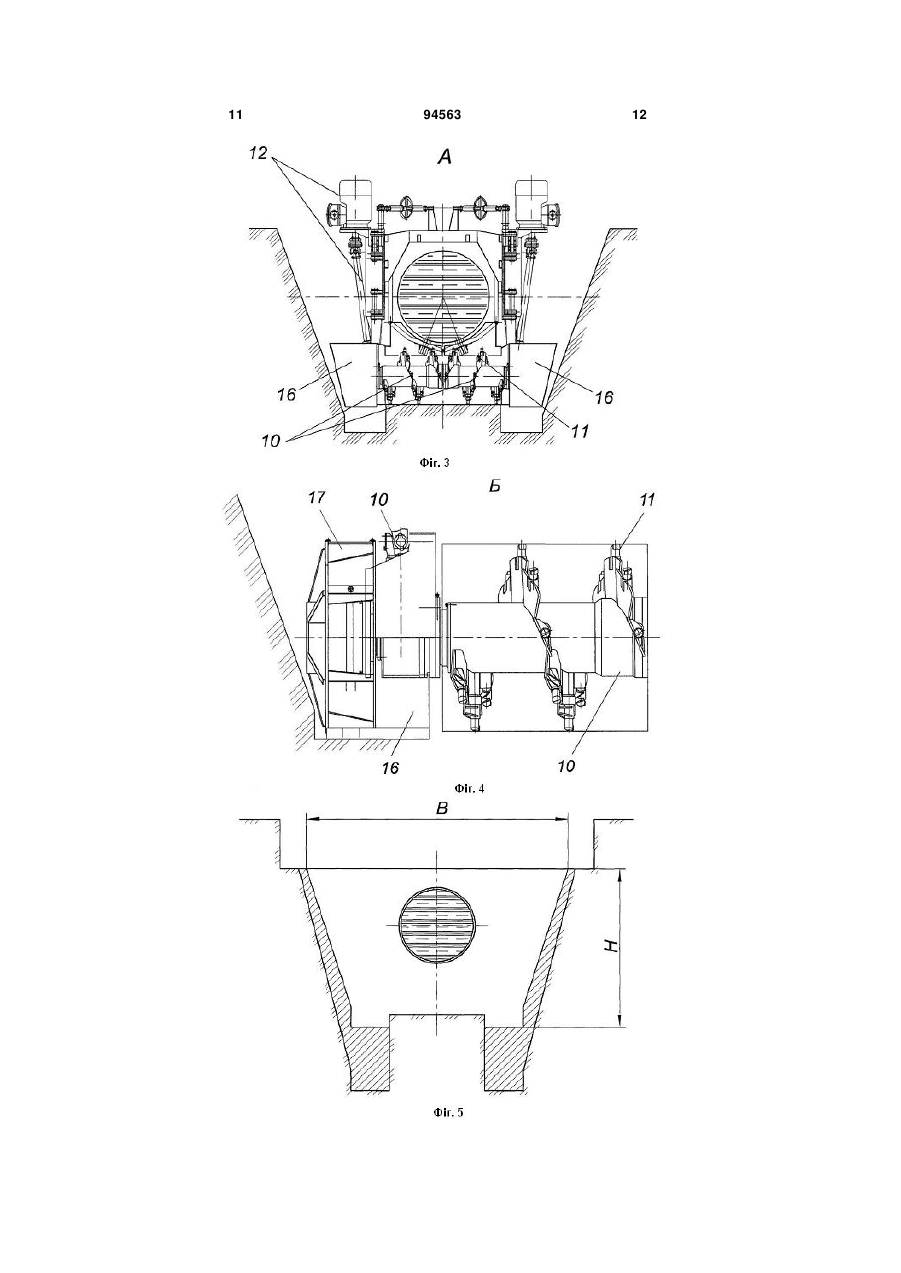
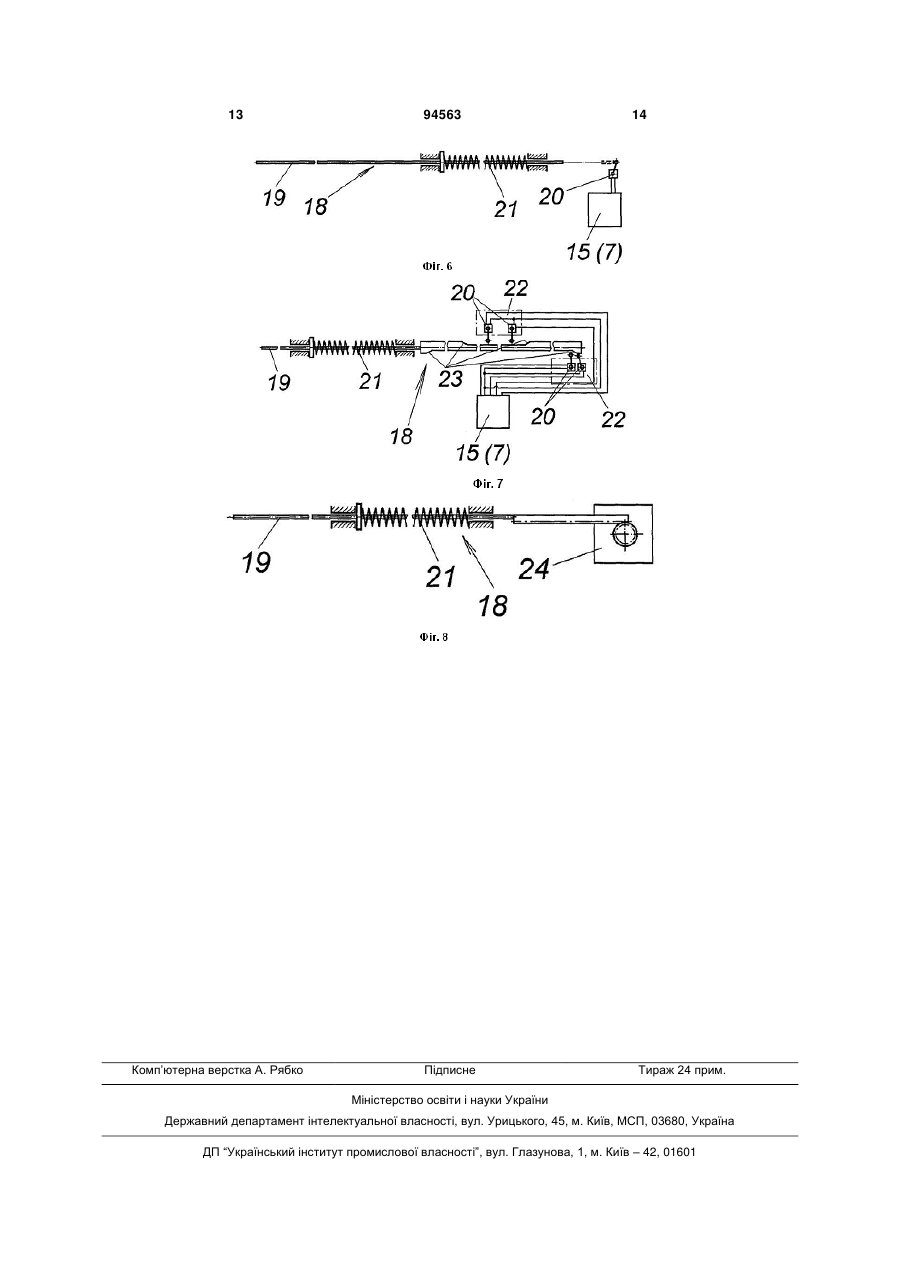
1. Тандем машин для розкривання та підкопування трубопроводу або іншого подібного підземного об'єкта, що містить машину для розкриття трубопроводу, до складу якої входять: самохідне базове шасі; два робочі органи, які пристосовані для розроблювання траншей з обох боків труби; копір-очищувач труби від ґрунту; евакуатор розробленого ґрунту; гідросистема, виконавчі органи якої пристосовані для регулювання положення робочих органів; система автоматики, яка пристосована для контролю та регулювання положення машини відносно осі трубопроводу і відстані від робочих органів до труби, а також машину підкопувальну роторну, до складу якої входять: самохідний трубохід, пристосований для переміщення машини по трубопроводу; привідні робочі органи, у вигляді двох шнекових роторів з горизонтальною віссю обертання; кожухи-зачисники, які розміщені позаду шнекових роторів, який відрізняється тим, 2 (19) 1 3 94563 4 6. Тандем машин за п. 3, який відрізняється тим, що він додатково оснащений системою для регулювання швидкості переміщення машини підкопувальної роторної та/або машини для розкриття трубопроводу таким чином, щоб стабілізувати відстань між машинами тандему у межах оптимального діапазону значень, причому до входу зазначеної системи регулювання швидкості під'єднаний зазначений пристрій для контролю відстані. 7. Тандем машин за п. 1, який відрізняється тим, що робочі органи, які пристосовані для розроблювання траншей з обох боків труби, виконані ланцюгового типу без зачисних башмаків. 8. Тандем машин за п. 1, який відрізняється тим, що як евакуатор розробленого ґрунту машини для розкриття трубопроводу використано конвеєр. Винахід належить до галузі технології капітального ремонту (КР) лінійної частини магістральних трубопроводів та технологічного обладнання, яке використовується при цьому. З інформаційних джерел щодо названої галузі відомо: - з існуючих схем укладання магістральних трубопроводів (підземна, напівпідземна, наземна, надземна) 98% належить підземній схемі; - вартість лінійної частини магістральних трубопроводів в середньому складає 50% його загальної вартості, а з урахуванням витрат на матеріали доходить до 85%; - абсолютно переважна частина магістральних нафто- та газопроводів змонтована з труб діаметром 530...1420 мм. Тому запропонований винахід може бути використаний на підприємствах, які експлуатують та ремонтують газо-, нафто- та продуктопроводи або інші подібні підземні об'єкти. Відомий комплекс машин підвищеної продуктивності для виконання КР магістральних трубопроводів діаметром 530...1220 мм із заміною ізоляції без підйому трубопроводу [1], у відповідності з яким комплекс складається з послідовно працюючих машин: - машини для пошарової розробки ґрунту (МПРҐ); - машини для розкриття трубопроводу (МРТ); - машини підкопувальної роторної (МПР); - машини для підбивання ґрунту під трубопроводом (МП). Відомий також комплекс землерийних машин для КР магістральних трубопроводів [2], який складається з послідовно працюючих одна за одною МПРҐ, МРТ, МПР і МП, причому МПРҐ та МРТ оснащені автоматичними пристроями, що забезпечують проходження цих машин вздовж осі трубопроводу, всі машини оснащені автоматичними пристроями, що контролюють розміри заглиблення робочих органів і відстані їх до трубопроводу, що виключає можливість механічного пошкодження труби. До недоліків перерахованих вище комплексів землерийних машин слід віднести наступні: - не контролюються відстані між працюючими одночасно машинами, особливо МРТ і МПР, не зважаючи на вплив цього фактора на напруженодеформований стан (НДС) труби, що ремонтується; - для розміщення фунту, що розробляється МПР під трубопроводом необхідне спорудження МРТ спеціальних приямків обабіч трубопроводу, що призводить до завищеної глибини розроблюваних траншей, збільшення об'єму ґрунту, що розроблюється навкруг трубопроводу, можливого підтоплення трубопроводу ґрунтовими водами. Найбільш близьким за технічною суттю та сукупністю ознак до винаходу, який заявляється, є комплект МРТ і МПР [3], які складаються відповідно з: МРТ - базового шасі з привідним двигуном внутрішнього згоряння, який є ходовим двигуном для нього; двох робочих органів (наприклад, ланцюгового типу) з укісниками та їх приводом, які розроблюють траншеї обабіч труби необхідної глибини для роботи ремонтних механізмів і з необхідними для стійкості траншей укосами; копіромочищувачем труби від ґрунту зверху неї, евакуатора розробленого ґрунту (наприклад, ґрунтомету), гідросистеми, виконавчі органи якої (наприклад, гідроциліндри) регулюють положення робочих органів; системи автоматики, яка контролює та регулює положення машини відносно осі трубопроводу і відстані від робочих органів до труби; МПР - трубоходу (наприклад, з рушієм гусеничного типу) з механізмами фіксації, поперечної стабілізації, притискування; робочого органа, який складається з двох симетрично розміщених роторів з горизонтальною віссю обертання, оснащених різцями; автономних електромеханічних приводів роторів і трубоходу, а також двох опорних лиж, шарнірно закріплених на кожухах роторів , які утримують машину в горизонтальній площині за рахунок свого обпирання на дно траншеї, при цьому кожухи роторів виконують роль плужних зачищувачів дна споруджуваної виїмки. До недоліків прототипу слід віднести наступні: - не контролюються відстані між працюючими одночасно і синхронно МРТ і МПР, що може призвести до неприпустимої зміни НДС труби, що ремонтується; - відсутні засоби аварійного зупинення МРТ і МПР; - ускладнення конструкції MPT через використання евакуатора ґрунту ґрунтометного типу, в зв'язку з чим використовується додаткова лижа і лижі для зменшення навантаження на гусениці базового шасі; - не оптимізовано параметри виїмки, споруджуваної МРТ і МПР навкруг трубопроводу. В основу винаходу поставлено задачу удосконалення прототипу, тобто підвищення ефективності працюючих послідовно одна за одною МРТ і МПР, шляхом того, що МРТ і МПР створюють тан 5 дем машин для розкривання і підкопування трубопроводу або іншого подібного підземного об'єкта. Зазначена задача вирішена тим, що у тандемі машин для розкривання та підкопування трубопроводу або іншого подібного підземного об'єкта, що містить машину для розкриття трубопроводу, до складу якої входять: самохідне базове шасі; два робочі органи, які пристосовані для розроблювання траншей з обох боків труби; копір-очищувач труби від ґрунту; евакуатор розробленого ґрунту; гідросистема, виконавчі органи якої пристосовані для регулювання положення робочих органів; система автоматики, яка пристосована для контролю та регулювання положення машини відносно осі трубопроводу і відстані від робочих органів до труби; а також машину підкопувальну роторну, до складу якої входять: самохідний трубохід, пристосований для переміщення машини по трубопроводу; привідні робочі органи, у вигляді двох шнекових роторів з горизонтальною віссю обертання; кожухи-зачисники, які розміщені позаду шнекових роторів, згідно із винаходом, машина підкопувальна роторна додатково оснащена пристроєм для евакуації ґрунту від робочих органів машини підкопувальної роторної на робочі органи машини для розкриття трубопроводу. Завдяки цьому ґрунт, який розроблюється машиною підкопувальною роторною, подається на робочі органи машини для розкриття трубопроводу і механізмами цієї машини транспортується у відвал, що дозволяє відмовитись від копання глибоких приямків з боків трубопроводу для розміщення у них зазначеного ґрунту. Це, по-перше, зменшує загальний обсяг земляних робіт і відповідно їх енергоємність та технічну складність їх реалізації, особливо у складних умовах (високому рівні ґрунтових вод, наявності підстилаючих твердих порід тощо). По-друге, відсутність глибоких приямків покращує здатність ґрунту (під трубопроводом) для обпирання на нього трубопроводу, що виключає неконтрольовані та надмірні просідання ґрунту під трубопроводом і відповідно виключає надмірні деформації трубопроводу та погіршення його напружено-деформованого стану як під час ремонтних робіт, так і потім, під час експлуатації. По-третє, кожна із машин тандему має максимально малу вагу та просту конструкцію при забезпеченні високих функціональних можливостей тандему. В окремих випадках здійснення винаходу зазначений технічний результат посилюється та доповнюється додатковими результатами тим, що зазначений пристрій для евакуації ґрунту від робочих органів машини підкопувальної роторної на робочі органи машини для розкриття трубопроводу включає в себе закріплені на кожухахзачисниках роторів додаткові кожухи-закрилки відвального типу, що пристосовані перекривати вільний простір відкопаних по боках трубопроводу траншей, та розміщені перед додатковими кожухами-закрилками привідні інтенсифікатори у вигляді лопатевих коліс, які пристосовані для сприяння евакуації ґрунту від робочих органів машини підкопувальної роторної на робочі органи машини для розкриття трубопроводу. 94563 6 Також тим, що тандем додатково оснащений пристроєм для контролю відстані між робочими органами машини для розкриття трубопроводу і машини підкопувальної роторної. Це дозволяє спростити синхронізацію переміщення машин тандему та виключити аварійні ситуації, які пов'язані із надмірним зменшенням чи збільшенням відстані між машинами. Також тим, що зазначений пристрій для контролю відстані включає в себе встановлені на машині підкопувальній роторній штангу та кінцевий вимикач, пристосований для аварійного зупинення машини підкопувальної роторної при контакті штанги або кінцевого вимикача із копіром-очищувачем труби від ґрунту машини для розкриття трубопроводу. Також тим, що зазначений пристрій для контролю відстані включає в себе штангу, яка встановлена на машині підкопувальній роторній з можливістю контактування своїм кінцем із копіромочищувачем труби від ґрунту машини для розкриття трубопроводу і внаслідок цього осьового лінійного переміщення проти зусилля пружини, а також елемент для контролю лінійного положення штанги. Також тим, що тандем додатково оснащений системою для регулювання швидкості переміщення машини підкопувальної роторної та/або машини для розкриття трубопроводу таким чином, щоб стабілізувати відстань між машинами тандему у межах оптимального діапазону значень, причому до входу зазначеної системи регулювання швидкості під'єднаний зазначений пристрій для контролю відстані. Також тим, що робочі органи, які пристосовані для розроблювання з обох боків труби траншей, виконані ланцюгового типу без зачисних башмаків. Також тим, що як евакуатор розробленого фунту машини для розкриття трубопроводу використано конвеєр. Суть винаходу пояснюється ілюстраціями, на яких зображені: на Фіг.1 - тандем МРТ і МПР (вид збоку); на Фіг.2 - те ж (вид зверху, тягач умовно не зображений); на Фіг.3 - вид А на Фіг.1; на Фіг.4 - вид Б на Фіг.1; на Фіг.5 - переріз траншеї при роботі тандему МРТ і МПР, де В - ширина по верху; Н - глибина; заштрихована частина перерізу - зменшення площі траншеї (у порівнянні із технологією роботи прототипу, яка передбачала евакуювання розробленого МПР ґрунту у приямки); на Фіг.6, 7, 8 - варіанти виконання пристрою для контролю відстані між робочими органами МРТ і МПР. Як показано на Фіг.1-4 до складу тандему машин для розкривання та підкопування трубопроводу або іншого подібного підземного об'єкта входить МРТ 1 (наприклад за UA 20377, 25.12.98 або UA 29135 U 10.01.2008 із зазначеними нижче відмінностями), яка включає в себе: базове шасі 2 з привідним двигуном внутрішнього згоряння (ДВЗ), який є ходовим двигуном та 7 джерелом енергії для приводу навісного робочого обладнання; два привідні робочі органи 3 (переважно ланцюгового типу) з укісниками (наприклад за UA 2003043419, 15.10.2004), але без зачисних башмаків, які пристосовані розроблювати траншеї обабіч труби необхідної для роботи ремонтних механізмів глибини і з необхідними для стійкості траншей укосами; копір-очищувач 4, пристосований для очищення труби від фунту зверху та з боків (наприклад за UA 2000116525, 17.06.2002); евакуатор, виконаний переважно у вигляді конвеєра 5, пристосований для транспортування розробленого фунту у відвал; гідросистема 6, виконавчі органи якої (наприклад, гідроциліндри) пристосовані щоб регулювати положення робочих органів; система управління 7 (на кресленнях не показана), яка пристосована щоб регулювати положення машини відносно осі трубопроводу і відстані від робочих органів до труби. До складу тандему входить МПР 8 (наприклад за US 6154988, 05.121.2000 або UA 17163 А, 31.10.1997 із зазначеними нижче відмінностями), яка включає в себе: електропривідний трубохід 9, пристосований для переміщення машини по трубопроводу (наприклад з рушієм гусеничного типу); привідні робочі органи, у вигляді двох шнекових роторів з горизонтальною віссю обертання 10, оснащених різцями 11 та автономними електромеханічними приводами 12; кожухи-зачисники 13, які розміщені позаду шнекових роторів 10; дві опорні лижі 14, які шарнірно закріплені на кожухах-зачисниках 13 та пристосовані для утримування машини в горизонтальному положенні шляхом обпирання на дно траншеї (наприклад за US 6154988, 05.121.2000); система управління 15 електроприводами усіх механізмів машини. МПР 8 за цим винаходом додатково оснащена пристроєм 26 для евакуації ґрунту від робочих органів 10 МПР 8 на ланцюгові робочі органи 3 МРТ 1, який включає в себе: закріплені на кожухах-зачисниках 13 роторів 10 додаткові кожухи-закрилки 16 відвального типу, що пристосовані перекривати вільний простір відкопаних по боках трубопроводу траншей; розміщені перед додатковими кожухамизакрилками 17 привідні інтенсифікатори у вигляді лопатевих коліс 16, які пристосовані для сприяння евакуації фунту від робочих органів (шнекових роторів 10) МПР 8 на робочі органи 3 МРТ1. Тандем машин може бути додатково оснащений пристроєм 18 для контролю відстані між робочими органами МРТ 1 і МПР 8. У одному із виконань зазначений пристрій 18 для контролю відстані включає в себе встановлену на МПР 8 штангу 19 та кінцевий вимикач 20, пристосований для аварійного зупинення МПР при механічному контакті штанги або кінцевого вимикача із копіром-очищувачем 4 труби від ґрунту МРТ 1. 94563 8 Штанга 19 може бути жорстко закріплена на рамі МПР, а кінцевий вимикач 20 - змонтований поблизу першого кінця штанги 19 і пристосований для механічного контакту (безпосереднього чи опосередкованого) із копіром-очищувачем 4 (на кресленнях не показано). У іншому виконанні штанга 19 може бути встановлена на рамі МРТ 8 (або у іншому виконанні на копірі-очищувачі 4 труби від ґрунту МРТ 1) з можливістю механічного контакту першого свого кінця із копіром-очищувачем 4 труби від фунту МРТ 1 (або у іншому виконанні із рамою МРТ 8) і можливістю внаслідок цього осьового лінійного переміщення проти зусилля пружини 21 (Фіг.6-8). Кінцевий вимикач 20 встановлений з можливістю механічного контакту (безпосереднього чи опосередкованого) із другим кінцем штанги 19 (Фіг.6). У такому виконанні кінцевий вимикач 20 за виконуваною ним функцією є, по суті, примітивним елементом 22 для контролю лінійного положення штанги 19. У інших виконаннях тандему елемент 22 для контролю лінійного положення штанги 19 може бути виконаний у вигляді декількох кінцевих вимикачів 20 (лінійки кінцевих вимикачів), розташованих у лінію вздовж напрямку переміщення штанги та пристосованих для послідовного механічного контакту із упором 23 чи системою упорів, виконаних на штанзі 19 (Фіг.7). Зазначені кінцеві вимикачі 20 можуть бути підключені до системи керування МРТ та/або МПР таким чином, щоб зупиняти певну машину (наприклад, МРТ при наближенні штанги до першого крайнього положення при її русі проти зусилля пружини 21 або МПР при наближенні штанги 19 до другого крайнього положення при її русі у напрямку зусилля пружини 21), або змінювати швидкість певної машини (1, 8) таким, чином щоб стабілізувати відстань між машинами (1, 8) тандему (відповідно лінійне положення штанги 19) у межах оптимального діапазону значень. У такому виконанні відповідні елементи системи керування МРТ та/або МПР, до яких підключені зазначені кінцеві вимикачі 20 (тобто елемент 22 для контролю лінійного положення штанги 19) за виконуваною ними функцією є, по суті, системою 24 для регулювання швидкості переміщення машин тандему - МПР 8 та/або МРТ 1. Зрозуміло, що у інших виконаннях елемент 22 для контролю лінійного положення штанги 19 може бути виконаний у вигляді будь-якого контактного чи безконтактного датчика, пристосованого для вимірювання лінійного чи кутового переміщення (наприклад датчики фірми Sick, див. URL:http://www.sick-automation.ru/catalog/sensors/). У інших виконаннях пристрій 18 для контролю відстані між робочими органами МРТ 1 і МПР 8 може бути виконаний безконтактним на базі будьякого активного дальноміру (звукового, радіо-, світлового, лазерного (наприклад, "Leica DISTO™ D8" (http.7/www.geo-sight.com/product_ info.php?products_id=106)) тощо). Зазначена система 24 для регулювання швидкості переміщення МПР 8 та/або МРТ 1, до входу якої під'єднаний зазначений пристрій 18 для контролю відстані може бути виконана у вигляді про 9 грамно-апаратного елемента бортового комп'ютера МРТ та/або МПР. У найпростішому варіанті виконання система 24 для регулювання швидкості переміщення МПР 8 може бути виконана у вигляді регулятора частоти обертання електроприводу 26 трубоходу 9, який кінематично (за допомогою пари зубчаста рейка-шестірня (Фіг.8), системи важелів тощо) з'єднаний із штангою. Зазначений безконтактний пристрій 18 для контролю відстані або елемент 22 для контролю лінійного положення штанги 19 контактного виконання пристрою 18 може бути підключений до системи керування МРТ та/або МПР таким чином, щоб візуалізувати відстань (лінійне положення штанги 15) між машинами тандему на дисплеї чи іншому пристрої у вигляді, який придатний для легкого сприйняття операторами цих машин. Тандем машин працює наступним чином. Рухаючись вздовж осі трубопроводу МРТ 1 своїми робочими органами 3 розробляє обабіч трубопроводу траншеї необхідного профілю, одночасно знімаючи копіром-очищувачем 4 ґрунт зверху труби. Розроблений фунт евакуюється за межі траншей евакуатором 5. Слідом за МРТ 1 рухається по трубі МПР 8, яка підкопує фунт під трубою роторними робочими органами 10, при цьому за допомогою кожухів 94563 10 зачисників 13, додаткових кожухів-закрилків 17 і інтенсифікаторів 16 розроблений під трубою фунт 25 спрямовується на робочі органи 3 МРТ 1, звідки він потрапляє на евакуатор 5 ґрунту МРТ 1 і з нього - за межі траншей у відвал. Необхідну відстань між одночасно і синхронно працюючими МРТ 1 і МПР 8 підтримують із використанням пристрою 18 та системи 24, які виключають аварійно небезпечні зближення чи віддалення машин (1, 8). Випробування тандему машин показали ефективність його роботи. Джерела інформації: 1. Технология капитального ремонта магистральных нефтепроводов диаметром 530-1220 мм с заменой изоляции без подъема трубопровода с применением комплекса машин повышенной производительности ВБН В.3.1.-320.20077720.01 2001. - 188 с. 2. Комплекс землерийних машин для капітального ремонту магістральних трубопроводів. - К.: НТУ, НДТЦ "Ротор", ДП "Завод ім. В.О. Малишева", ДАТ "ПДМН", 2009. - 34 с. 3. Мусійко В.Д. Екскаватори поздовжнього копання: Навч. посібник.- К.: НТУ, ЗАТ "Віпол", 2008. - 240 с. - С. 190-200. 11 94563 12 13 Комп’ютерна верстка А. Рябко 94563 Підписне 14 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTandem of machines for opening and digging under pipeline or other like underground object
Автори англійськоюDmytrychenko Mykola Fedorovych, Musiiko Volodymyr Danylovych, Biliavkovych Mykola Oleksiiovych, Kuzminets Mykola Petrovych, Balanin Vitalii Khrystoforovych, Savenok Vasyl Ivanovych
Назва патенту російськоюТандем машин для раскрытия и подкапывания трубопровода или другого подобного подземного объекта
Автори російськоюДмитриченко Николай Федорович, Мусийко Владимир Данилович, Билякович Николай Алексеевич, Кузьминец Николай Петрович, Баланин Виталий Христофорович, Савенок Василий Иванович
МПК / Мітки
МПК: E02F 5/10, E02F 5/06, E02F 5/08, E02F 5/14, E02F 9/20
Мітки: трубопроводу, підземного, іншого, об'єкта, тандем, підкопування, машин, розкривання, подібного
Код посилання
<a href="https://ua.patents.su/7-94563-tandem-mashin-dlya-rozkrivannya-ta-pidkopuvannya-truboprovodu-abo-inshogo-podibnogo-pidzemnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Тандем машин для розкривання та підкопування трубопроводу або іншого подібного підземного об’єкта</a>
Машина для розкривання трубопроводу
Номер патенту: 29135
Опубліковано: 10.01.2008
Автори: Карпенко Олександр Миколайович, Уруський Олег Семенович, Коваль Андрій Борисович, Мусійко Володимир Данилович, Сляднєв Олег Всеволодович, Лейченко Юрій Борисович, Цибізов Олександр Георгійович
МПК: E02F 5/02
Мітки: машина, трубопроводу, розкривання
Формула / Реферат:
1. Машина для розкривання трубопроводу, що містить базове шасі, яке пристосоване для переміщення машини вздовж трубопроводу, передню раму, що зв'язана із базовим шасі, задню раму, що зв'язана з передньою рамою за допомогою проміжного елемента, який з'єднаний з передньою та задньою рамами відповідно переднім та заднім шарнірними з'єднаннями, що мають по суті вертикальні уявні осі повороту, які в напрямі переміщення машини розташовані на...
Машина для розкривання трубопроводу
Номер патенту: 83775
Опубліковано: 11.08.2008
Автори: Лейченко Юрій Борисович, Цибізов Олександр Георгійович, Сляднєв Олег Всеволодович, Карпенко Олександр Миколайович, Уруський Олег Семенович, Мусійко Володимир Данилович, Коваль Андрій Борисович
Мітки: трубопроводу, машина, розкривання
Формула / Реферат:
1. Машина для розкривання трубопроводу, що містить базове шасі, яке пристосоване для переміщення машини вздовж трубопроводу, передню раму, що зв'язана із базовим шасі, задню раму, що зв'язана з передньою рамою за допомогою проміжного елемента, який з'єднаний з передньою та задньою рамами відповідно переднім та заднім шарнірними з'єднаннями, що мають по суті вертикальні уявні осі повороту, які в напрямі переміщення машини розташовані на...
Спосіб визначення рівнодійної поздовжніх дотичних зусиль на поверхні підземного трубопроводу
Номер патенту: 40950
Опубліковано: 27.04.2009
Автор: Светницький Сергій Олексійович
МПК: G01C 3/00
Мітки: зусиль, трубопроводу, дотичних, поздовжніх, поверхні, визначення, рівнодійної, спосіб, підземного
Формула / Реферат:
Спосіб визначення рівнодійної поздовжніх дотичних зусиль на поверхні підземного трубопроводу, що включає визначення горизонтальних деформацій земної поверхні, який відрізняється тим, що шляхом систематичного вимірювання горизонтальних поздовжніх переміщень фіксованих перерізів трубопроводу відносно спеціальних реперів визначають переміщення трубопроводу як різницю виміряних горизонтальних переміщень земної поверхні і переміщень трубопроводу...
Спосіб визначення опору грунту на трасі підземного трубопроводу
Номер патенту: 42313
Опубліковано: 15.10.2001
Автор: Джала Роман Михайлович
МПК: G01R 27/16, C23F 13/00
Мітки: підземного, трасі, трубопроводу, опору, визначення, грунту, спосіб
Формула / Реферат:
1. Спосіб визначення опору грунту на трасі підземного трубопроводу, за яким один контакт джерела струму підключають до заземлення, міряють напругу U між двома електродами, встановленими на поверхні грунту, питомий опір грунту обчислюють за результатами вимірів, який відрізняється тим, що другий контакт джерела струму підключають до труби, визначають проекцію осі труби на поверхню землі і глибину h залягання труби, встановлюють перший...
Пристрій для санації підземного металевого трубопроводу
Номер патенту: 15904
Опубліковано: 17.07.2006
Автори: Лялюк Олександр Миколайович, Глубокий Віталій Васильович, Ратушняк Георгій Сергійович
МПК: F16L 58/02
Мітки: пристрій, підземного, трубопроводу, металевого, санації
Формула / Реферат:
Пристрій для санації підземного металевого трубопроводу, що містить трубопровід для транспортування облицювальної речовини, який приєднаний до обертового органа, який відрізняється тим, що в нього введено механізм для очистки внутрішньої поверхні металевого трубопроводу з щітками на кінцях та отворами, які розташовані біля щіток, вертлюг, який з’єднує трубопровід для транспортування в’яжучої полімерної речовини та механізм для очистки...
Попередній патент: Спосіб одержання металічного германію з діоксиду германію
Наступний патент: Спосіб вимірювання миттєвої віброшвидкості
Випадковий патент: Мобільна система караоке