Нейрокомп’ютерний пристрій розпізнавання повітряних об’єктів
Номер патенту: 9979
Опубліковано: 30.09.1996
Автори: Новіков Володимир Пилипович, Кулько Аркадій В'ячеславович, Гребенюк Андрій Юрійович, Берека Валерій Веніамінович

Формула / Реферат
Нейтрокомпьютерное устройство распознавания воздушных объектов, содержащее блок управления, состоящий из последовательно соединенных RS-триггера, второго элемента И, счетчика импульсов, регистра кодов дальности и цифроаналогового преобразователя, выход которого является первым выходом блока управления, последовательно соединенных элемента НЕ, вход которого является первым входом блока управления и соединен с R-входом RS-триггера и входом разрешения приема информации регистра кодов дальности, и формирователя импульсов, выход которого является третьим выходом блока управления и соединен с R-входом счетчика импульсов, причем выход генератора тактовых импульсов соединен со вторыми входами первого и второго элементов И, а также дешифратора, выходы которого являются пятыми выходами блока управления, а входы соединены с выходом измерителя дисперсии шума, второй вход которого является вторым входом блока управления, а первый вход соединен с выходом генератора тактовых импульсов, при этом последовательно соединены первый элемент И, первый блок задержки, выход которого является четвертым выходом блока управления, а вход -вторым входом блока управления, причем первый вход первого элемента И соединен с входом элемента НЕ, и последовательно соединенные антенну, приемник, детектор, ключ, аналого-цифровой ' преобразователь, первый блок сдвигающих регистров, блок постоянных запоминающих устройств, блоки сумматоров и второй блок сдвигающих регистров, выходы второго блока сдвигающих регистров соединены с соответствующими входами блока устройств выбора максимума, выходы которого соединены с соответствующими входами устройства выбора максимума, выходы которого соединены с входами блока элементовИЛИ, выходы которого соединены с входами индикатора, причем первый выход блока управления соединен с опорным входом аналого-цифрового преобразователя, а второй выход блока управления соединен с входом сдвига первого блока сдвигающих регистров и тактирующим входом аналого-цифрового преобразователя, а четвертый выход - со входами сдвига второго блока сдвигающих регистров, входы установки в нуль первого блока сдвигающих регистров и второго блока сдвигающих регистров объединены и соединены с третьим выходом блока управления, пятые управляющие выходы которого соединены с объединенными управляющими входами блоков постоянных запоминающих устройств, причем первый вход блока управления соединен со вторым входом ключа и подключен к шине управляющего импульса устройства распознавания, второй вход блока управления соединен с первым входом ключа, отличающееся тем, что в него дополнительно введены первый, второй и третий блоки цифровых компараторов, первый, второй и третий шифраторы, причем соответствующие информационные входы устройства выбора максимума соединены с соответствующими первыми входами первого, второго и третьего блоков цифровых компараторов, вторые входы которых соединены с датчиками кодов, выходы цифровых компараторов первого блока цифровых компараторов соединены со входами первого шифратора, выходы которого соединены с первым управляющим входом индикатора, выходы цифровых компараторов второго блока цифровых компараторов соединены со входами второго шифратора, выходы которого соединены со вторым управляющим входом индикатора, выходы цифровых компараторов третьего блока цифровых компараторов соединены со входами третьего шифратора, выходы которого соединены с третьим управляющим входом индикатора, причем соответствующие управляющие выходы устройства выбора максимума соединены с соответствующими управляющими входами первого, второго и третьего шифраторов.
Текст
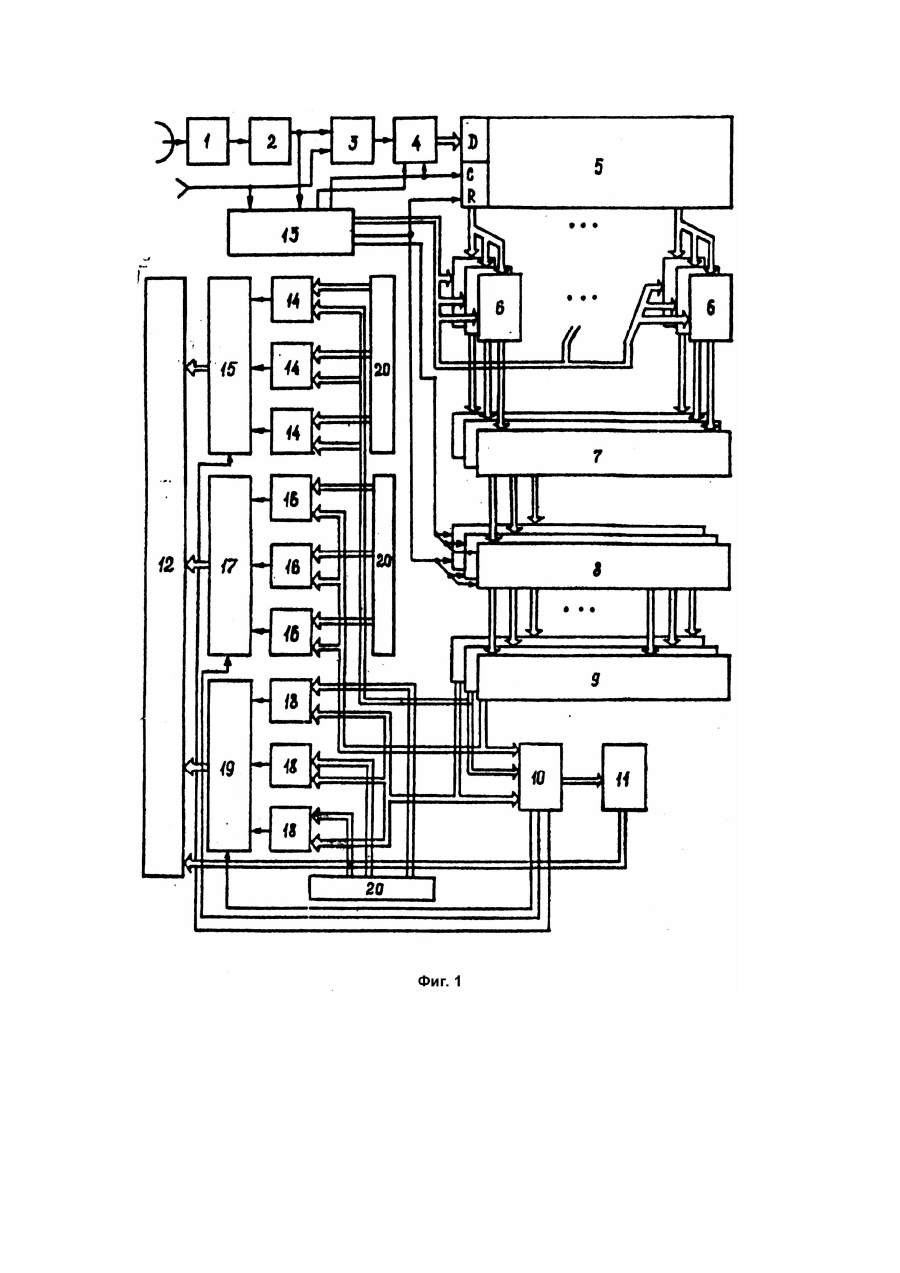
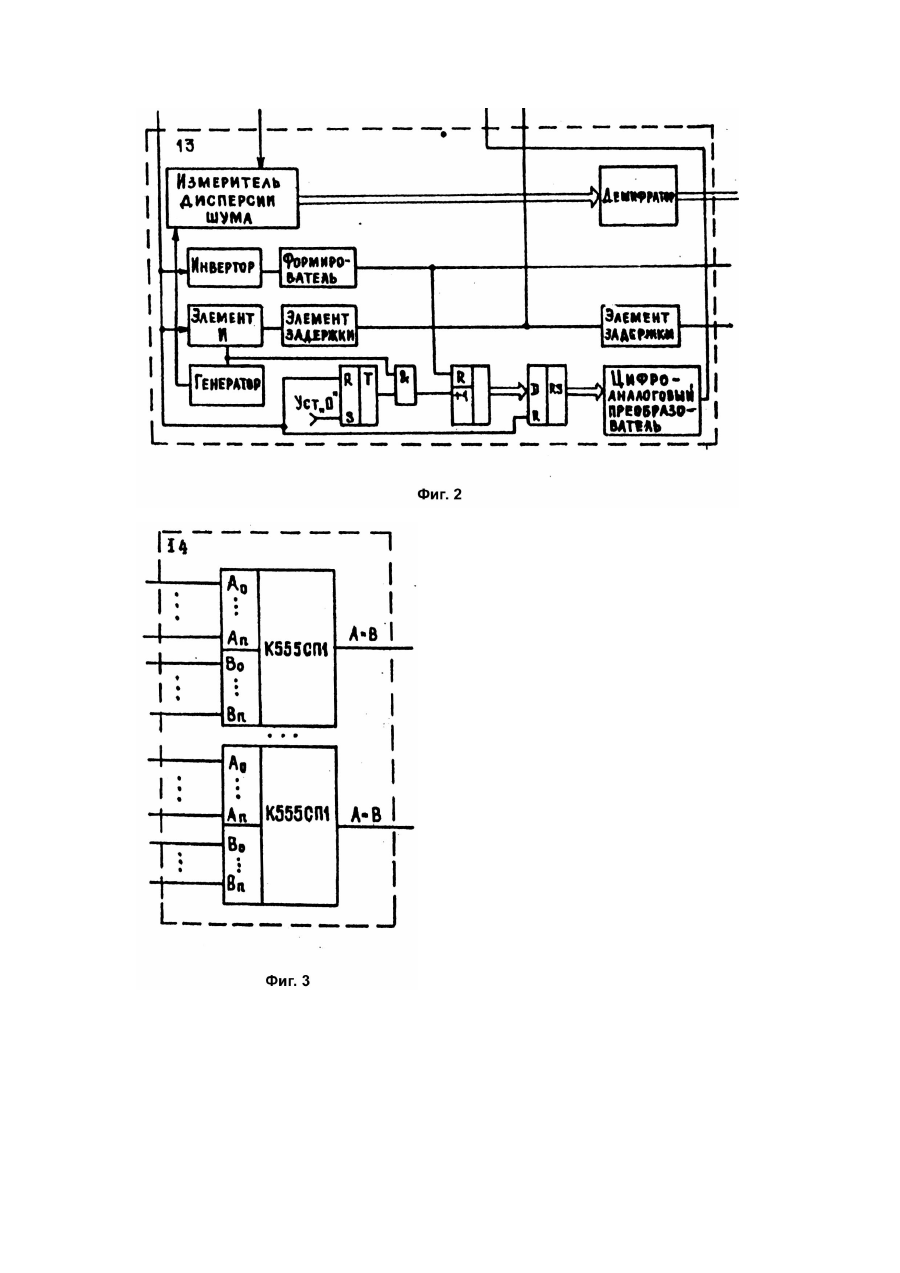
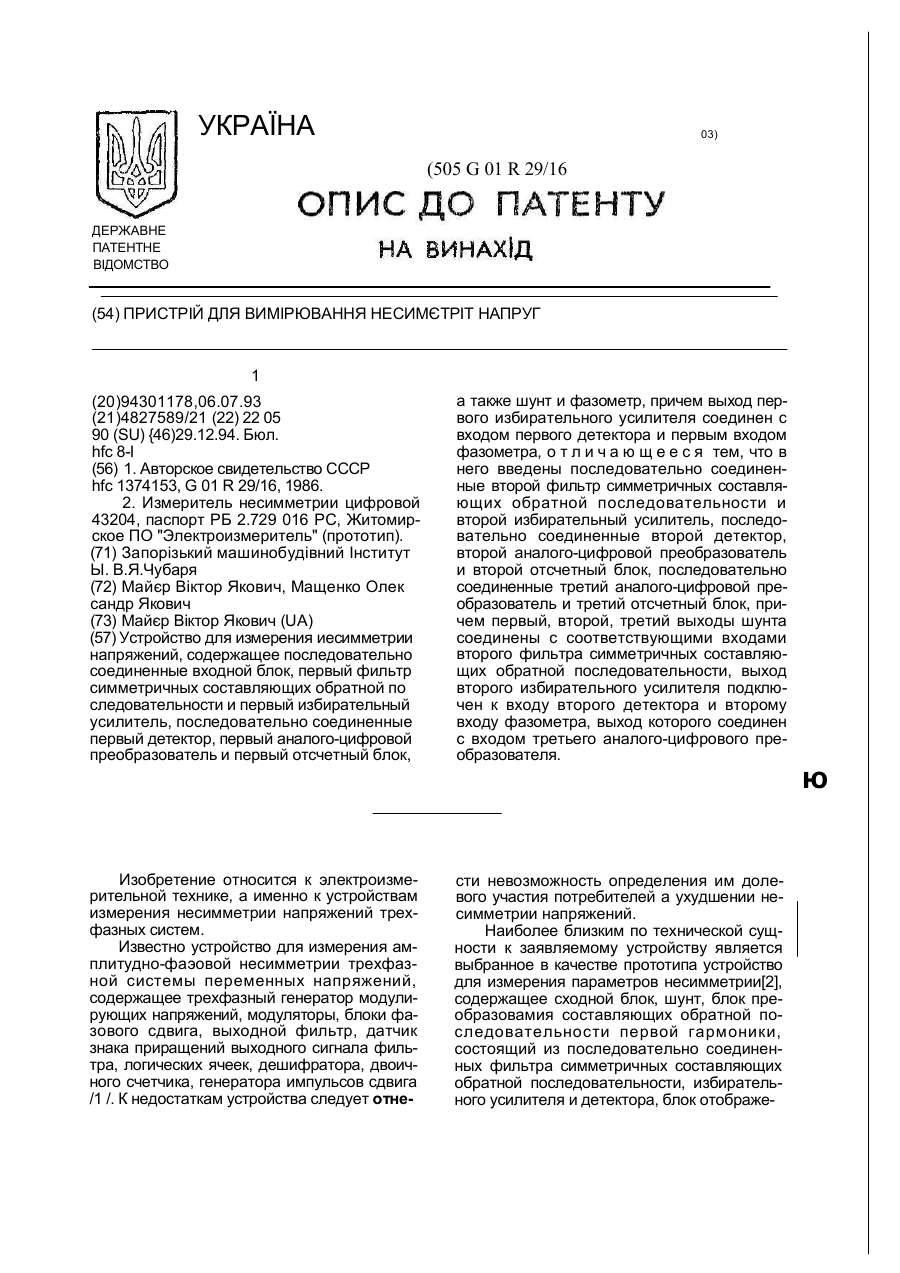
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) с широкополосными линейно-частотномодулированными (ЛЧС) сигналами для обработки радиолокационных сигналов в интересах распознавания классов воздушных объектов. Наиболее близким техническим решением к предлагаемому является устройство распознавания радиолокационных целей, содержащее дешифратор, первый блок задержки, второй блок задержки, три регистра, три сумматора и последовательно соединенные антенну, приемник, амплитудный детектор, ключ и аналого-цифровой преобразователь, последовательно соединенные блок элементов ИЛИ и индикатор, последовательно соединенные RS-триггер, второй элемент И, счетчик импульсов, регистр кодов дальности и цифроаналоговый преобразователь, выход которого соединен с опорным входом аналого-цифрового преобразователя, последовательно соединенные элемент НЕ, вход которого соединен со входом управляющего импульса устройства распознавания радиолокационных целей, вторым входом ключа, R-входом RS-триггера и входом разрешения приема информации регистра кодов дальности, и формирователь импульсов, выход которого соединен с R-входом счетчика импульсов, причем выход генератора тактовых импульсов соединен со вторыми входами первого и второго элементов И, а S-вход RS-триггера соединен с синхронизирующим входом устройства распознавания радиолокационных целей, выходы первого блока сдвигающих регистров соединены с адресными входами блоков постоянных запоминающих устройств, информационные выходы которых соединены с соответствующими входами блоков сумматоров, выходы которых соединены с соответствующими входами второго блока сдвигающих регистров, выходы которого соединены с соответствующими входами блока устройства выбора максимума, выходы которого соединены с соответствующими входами устройства выбора максимума, выходы которого соединены с входами блока элементов ИЛИ, причем управляющие входы блоков постоянных запоминающих устройств соединены с выходами дешифратора, входы которого соединены с выходами измерителя дисперсии шума, второй вход которого соединен с выходом амплитудного детектора, а первый вход - с выходом генератора тактовых импульсов, при этом последовательно соединенные первый элемент И, первый блок задержки, выход которого соединен с первыми входами второго блока сдвигающих регистров, вторые входы которого соединены с выходом формирователя импульсов и входом первого блока сдвигающих регистров, вход сдвига которого соединен с тактирующим входом аналого-цифрового преобразователя и выходом первого блока задержки, причем первый вход первого элемента И соединен с входом элемента НЕ. Работа известного устройства распознавания радиолокационных целей заключается в следующем. Принятый приемником отраженный ЛЧМ сигнал обрабатывается и поступает на амплитудный детектор. На его выходе формируется радиолокационный портрет, который через ключ поступает на вход аналого-цифрового преобразователя (АЦП). Последовательность дискретных переменных на выходе аналого-цифрового преобразователя, при независимых отсчетах можно аппроксимировать принимающих значения регулярными неоднородными - связными цепями Маркова с состояниями. Здесь число уровней квантования, - число отсчетов радиолокационного портрета в стробе дальности. В этом случае многомерные распределения вероятностей радиолокационного портрета с шумом для где класса и шума можно записать следующим образом: - вероятность события, что переменная Отношение правдоподобия для класса принимает вид Логарифмируя, получаем Логарифм этого отношения является достаточной статистикой для принятия решения о принадлежности принимаемой реализации к классу, Алгоритм принятия решения, что принимаемая реализация относится к классу заключается в вычислении и определении соответствующего максимальному из вычисленных значений Выборки с выхода аналого-цифрового преобразователя записываются в первый блок сдвигающих регистров. Разрядные выходы сдвигающих регистров являются адресными входами блока постоянных запоминающих устройств, в котором записаны весовые коэффициенты С помощью блоков сумматоров образуется для отношений правдоподобия классов целей. Устройство выбора максимума определяет номер сумматора с максимальным и код класса цели отражается на индикаторе. В устройстве производится определение максимального отношения правдоподобия в ожидаемом интервале появления цели. Для этого текущие значения вводятся во второй блок сдвигающих регистров. После получения отношений правдоподобия блок устройств выбора максимума определяет максимальное значение отношения правдоподобия в ожидаемом интервале появления цели, которые подаются на устройство выбора максимума. Весовые коэффициенты зависят от дисперсии шума. Поэтому в устройстве предусмотрена их коррекция в зависимости от дисперсии шума. Для этого используется переключение постоянных запоминающих устройств посредством первого дешифратора по результатам измерения дисперсии шума. В данном устройстве определяется класс воздушного объекта. Такой информации недостаточно для оптимального целераспределения. Следовательно, устройство имеет низкую информационную способность из-за неспособности распознавать типы воздушных объектов. Задачей изобретения является повышение информационной способности устройства за счет распознавания типов воздушных объектов. Поставленная задача достигается тем, что в известное устройство, содержащее блок управления и последовательно соединенные антенну, приемник, детектор; ключ, аналогоцифровой преобразователь, первый блок сдвигающих регистров, блок постоянных запоминающих устройств, блоки сумматоров и второй блок сдвигающих регистров, выходы второго блока сдвигающих регистров соединены с соответствующими входами блока устройств выбора максимума, выходы которого соединены с соответствующими входами устройства выбора максимума, выходы которого соединены с входами блока элементов ИЛИ, выходы которого соединены с входами индикатора, причем второй выход блока управления соединен с выходом сдвига первого блока сдвигающих регистров и тактирующим входом аналого-цифрового преобразователя, а четвертый выход - с входами второго блока сдвигающих регистров, входы установки в нуль первого блока сдвигающих регистров, и второго блока сдвигающих регистров объединены и соединены с третьим выходом блока управления, пятые управляющие выходы которого соединены с объединенными управляющими входами блоков постоянных запоминающих устройств, причем первый вход блока управления соединен со вторым входом ключа и подключен к шине управляющего импульса устройства распознавания, второй вход блока управления соединен с первым входом ключа, введены первый, второй и третий блоки цифровых компараторов, первый, второй и третий шифраторы, причем соответствующие информационные входы устройства выбора максимума соединены с соответствующими первыми входами первого, второго и третьего блоков цифровых компараторов, вторые входы которых соединены с датчиками кодов, выходы компараторов первого блока цифровых компараторов соединены со входами первого шифратора, выходы которого соединены с первым управляющим входом индикатора, выходы цифровых компараторов второго блока цифровых компараторов соединены со входами второго шифратора, выходы которого соединены со вторым управляющим входом индикатора, выходы цифровых компараторов третьего блока цифровых компараторов соединены со входами третьего шифратора выходы которого соединены с третьим управляющим входом индикатора, причем соответствующие управляющие выходы устройства выбора максимума соединены с соответствующими управляющими входами первого, второго и третьего шифраторов. На фиг.1 представлена структурная схема нейрокомпьютерного устройства распознавания воздушных объектов. На фиг.2 приведена структурная схема блока управления. На фиг.3 приведена структурная схема блока цифровых компараторов. Нейрокомпьютерное устройство распознавания воздушных объектов (см. фиг.1) содержит приемник 1, амплитудный детектор 2, ключ 3, аналого-цифровой преобразователь 4, первый блок сдвигающих регистров 5, блоки постоянных запоминающих устройств 6, блоки сумматоров 7, второй блок сдвигающих регистров 8, блок устройства выбора максимума 9, устройство выбора максимума 10, блок элементов ИЛИ 11, индикатор 12, блок управления 13, первый блок цифровых компараторов 14, первый шифратор 15, второй блок цифровых компараторов 16, второй шифратор 17, третий блок цифровых компараторов 18, третий шифратор 19, датчики кодов 20. Нейрокомпьютерное устройство распознавания воздушных объектов содержит последовательно соединенные антенну, приемник 1, детектор 2, ключ 3, аналого-цифровой преобразователь 4, первый блок сдвигающих регистров 5, блок постоянных запоминающих устройств 6, блоки сумматоров 7 и второй блок сдвигающих регистров 8. Выходы второго блока сдвигающих регистров 8 соединены с соответствующими входами блока устройств выбора максимума 9, выходы которого соединены с устройством выбора максимума 10, выходы которого соединены с входами блока элементов ИЛИ 11, выходы которого соединены с входами индикатора 12, причем второй выход блока управления 13 соединен с входом сдвига первого блока сдвигающих регистров 5 и тактирующим входом аналого-цифрового преобразователя 4, а четвертый выход - с входами сдвига второго блока сдвигающих регистров 8. Входы установки в нуль первого блока сдвигающих регистров 5 и второго блока сдвигающих регистров 8 объединены с третьим выходом блока управления 13, пятые управляющие выходы которого соединены с объединенными управляющими входами блоков постоянных запоминающих устройств б, причем первый вход блока управления 13 соединен со вторым входом ключа 3 и подключен к шине управляющего импульса устройства распознавания, второй вход блока управления 13 соединен с первым входом ключа 3. Соответствующие информационные входы устройства выбора максимума 10 соединены с соответствующими первыми входами первого, второго и третьего блоков цифровых компараторов, вторые входы которых соединены с датчиками кодов 20. Выходы цифровых компараторов первого блока цифровых компараторов 14 соединены со входами первого шифратора 15, выходы которого соединены с первым управляющим входом индикатора 12. Выходы цифровых компараторов второго блока цифровых компараторов 16 соединены со входами второго шифратора 17, выходы которого соединены со вторым управляющим входом индикатора 12. Выходы компараторов третьего блока цифровых компараторов 18 соединены со входами третьего шифратора 19, выходы которого соединены с третьим управляющим входом индикатора 12. Соответствующие управляющие выходы устройства выбора максимума 10 соединены с соответствующими управляющими входами первого, второго и третьего шифраторов 15, 17, 19. Работа предлагаемого нейрокомпьютерного устройства распознавания воздушных объектов заключается в следующем. Принятый приемником 1 отраженный ЛЧМ сигнал обрабатывается и поступает на детектор 2. На его выходе формируется радиолокационный портрет (РЛП), который через ключ 3 поступает на вход аналого-цифрового преобразователя 4. Последовательность дискретных переменных на выходе аналого-цифрового преобразователя 4, принимающих значения при независимых отсчетах можно аппроксимировать регулярными неоднородными нуль-связными цепями Маркова с состояниями. Здесь - число уровней квантования, - число отсчетов РЛП в стробе дальности. В этом случае многомерные распределения вероятностей РЛП с шумом для класса и шума можно записать следующим образом: где - вероятность события, что переменная Матрица отношений правдоподобия для образом: классов может быть записана следующим Логарифмируя, получим Полученное выражение определяет структуру нейрокомпьютерного устройства распознавания. На нейрон поступает набор входных сигналов представляющий собой сигналы с выхода аналого-цифрового преобразователя 4. Для одновременного возбуждения нейронов набор входных сигналов предварительно записывается в первый блок сдвигающихся регистров 5. Нейроны представляют собой ассоциативную память и выполнены на блоках постоянных запоминающих устройств 6. Совокупность нейронов представляет собой нейронную сеть. Нейронная сеть образована совокупностью постоянных запоминающих устройств 6 для одного (например, класса. В каждом из нейронов хранится различных весов для класса. Здесь разрядность аналого-цифрового преобразователя 4. Весовые коэффициенты вычисляются по обучающей выборке во время обучения нейронной сети. С помощью сумматоров 7 вычисляются отношений правдоподобия Устройство выбора максимума 10 представляет собой нейрон, определяющий номер сумматора с максимальным Код класса отображается на индикаторе 12. Блок элементов ИЛИ выполняет роль дешифратора для управления индикатором. Учитывая, что точное временное положение воздушного объекта неизвестно, то в устройстве производится определение максимального отношения правдоподобия в ожидаемом интервале появления воздушного объекта. Для этого текущие значения вводятся во второй блок сдвигающих регистров 8. После получения отношений правдоподобия блоки устройств выбора максимума 9 определяют максимальные отношения правдоподобия в ожидаемом интервале появления воздушного объекта, которые и подаются на устройство выбора максимума 10 для дальнейшей обработки. Принятие решения о типе воздушного объекта в распознанном классе заключается в сравнении вычисленного отношения правдоподобия с набором пороговых значений Каждое пороговое значение соответствует определенному типу воздушного объекта. В каждом классе может быть разное число типов воздушных объектов, поэтому количество пороговых значений в каждом классе разное. Сравнение вычисленного значения правдоподобия с пороговыми (см. фиг.3) значениями выполняется в блоках цифровых компараторов 14, 16, 18. На вторые входы цифровых компараторов подаются пороговые значения отношений правдоподобия типов воздушных объектов. На выходах цифровых компараторов образуется термометрический код, который посредством шифраторов 15, 17, 19 преобразуется в код управления индикатором 12. Устройство выбора максимума 10 управляет также шифраторами 15, 17, 19. Оно разрешает работу только того шифратора, который соответствует распознанному классу. Следовательно введение цифровых компараторов, шифраторов и датчиков кодов позволяет распознавать типы воздушных объектов. В то время как прототип мог определить только классы. Весовые коэффициенты зависят от дисперсии шума. Поэтому в устройстве предусмотрена их коррекция в зависимости от дисперсии шума. Для этого используется переключение постоянных запоминающих устройств (нейронов) посредством дешифратора блока управления 13 по результатам измерения дисперсии шума измерителем шума блока управления 13. В качестве цифровых компараторов могут быть использованы интегральные микросхемы К55СП1. В качестве шифраторов могут использоваться любые шифраторы, преобразующие термометрический код в двоичный. Постоянные запоминающие устройства могут быть выполнены на интегральных микросхемах 573 серии. Блоки сумматоров могут быть выполнены на микросхемах 155 серии. Аналого-цифровой преобразователь может быть построен на интегральных микросхемах 1107, ПВ1, 1107, ПВ2, 107 ПВЗ. Так как напряжение отраженных сигналов обратно пропорционально квадрату расстояния до воздушного объекта то возникает необходимость в реализации нормировки радиолокационного портрета. Для этого автоматически изменяется опорное напряжение аналогоцифрового преобразователя обратно пропорционально квадрату дальности. Дальность до цели измеряется посредством преобразователя временного интервала в код, собранного на RSтриггере, элементе И и счетчике импульсов (см. фиг.2). Предлагаемое техническое решение направлено на повышение информационной способности. Повышение информационной способности достигается за счет придания ему способности распознавания не только классов воздушных объектов, но и типов. Этим самым оно превосходит базовый объект, в качестве которого можно выбрать устройство распознавания прототип.
ДивитисяДодаткова інформація
Назва патенту англійськоюNeuro-computer device for recognition of airborne objects
Автори англійськоюKulko Arkadii Viacheslavovych, Bereka Valerii Veniaminovych, Hrebeniuk Andrii Yuriiovych
Назва патенту російськоюНейрокомпьютерное устройство распознавания воздушных объектов
Автори російськоюКулько Аркадий Вячеславович, Берека Валерий Вениаминович, Гребенюк Андрей Юрьевич
МПК / Мітки
МПК: G01S 13/02, G01S 13/78
Мітки: пристрій, об'єктів, повітряних, нейрокомп'ютерний, розпізнавання
Код посилання
<a href="https://ua.patents.su/7-9979-nejjrokompyuternijj-pristrijj-rozpiznavannya-povitryanikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Нейрокомп’ютерний пристрій розпізнавання повітряних об’єктів</a>
Пристрій розпізнавання радіолокаційних об’єктів

Номер патенту: 9978
Опубліковано: 30.09.1996
Автори: Кулько Аркадій В'ячеславович, Новіков Володимир Пилипович, Гребенюк Андрій Юрійович, Берека Валерій Веніамінович
МПК: G01S 13/02, G01S 13/78
Мітки: об'єктів, радіолокаційних, розпізнавання, пристрій
Формула / Реферат:
Устройство распознавания радиолокационных объектов, содержащее N каналов обработки, каждый из которых включает блок задержки, приемник и ключ, причем информационные выходы первых блоков сдвигающих регистров соединены с адресными входами блоков постоянных запоминающих устройств, информационные выходы которых соединены с соответствующими входами вторых блоков сдвигающих регистров, выходы которых соединены с соответствующими входами блока...
Пристрій для вимірювання несиметрії напруг
Номер патенту: 6523
Опубліковано: 29.12.1994
Автори: Майєр Віктор Якович, Мащенко Олександр Якович
МПК: G01R 29/00
Мітки: несиметрії, вимірювання, пристрій, напруг
Формула / Реферат:
(57) Устройство для измерения несимметрии напряжений, содержащее последовательно соединенные входной блок, первый фильтр симметричных составляющих обратной последовательности и первый избирательный усилитель, последовательно соединенные первый детектор, первый аналого-цифровой преобразователь и первый отсчетный блок, а также шунт и фазометр, причем выход первого избирательного усилителя соединен с входом первого детектора и первым входом...
Пристрій для формування залишків по модулю
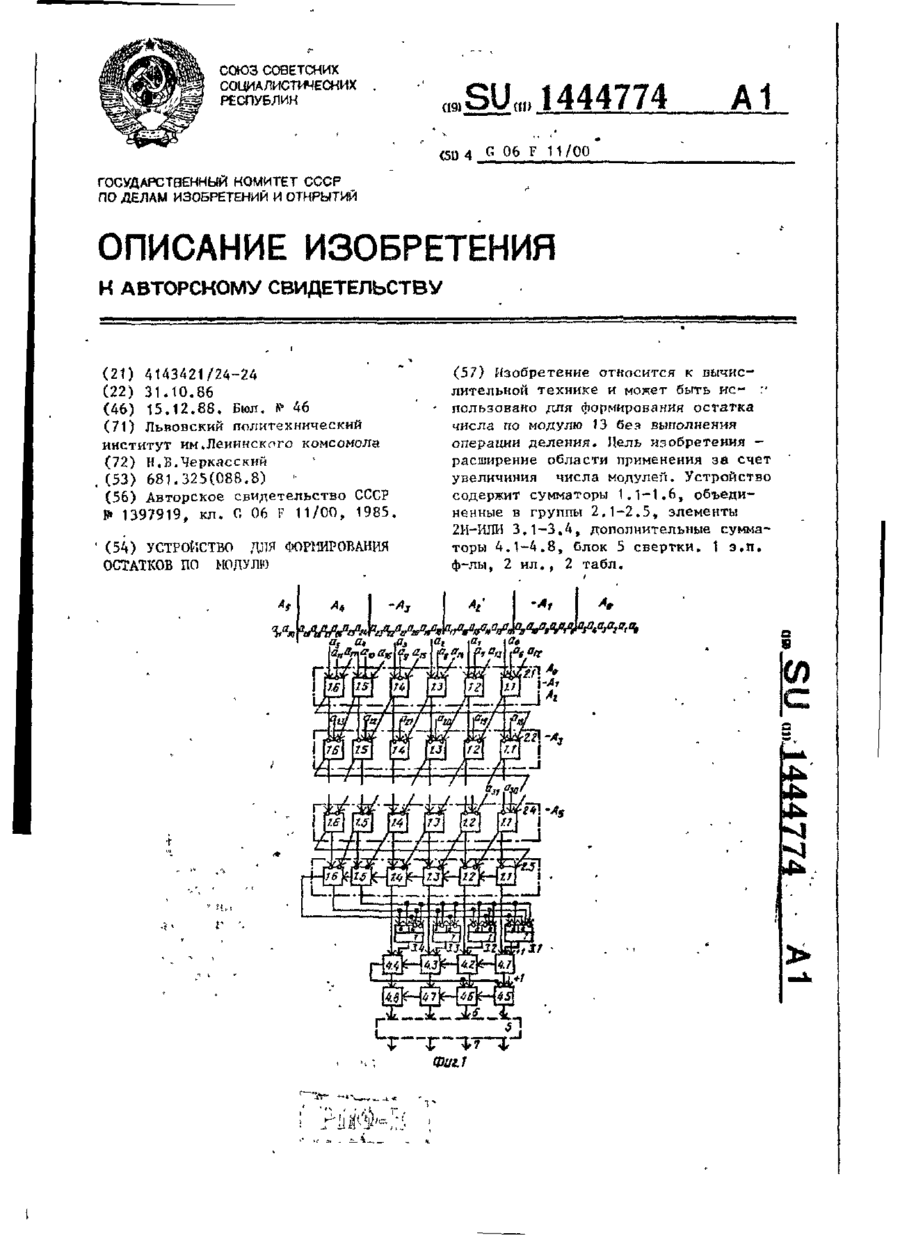
Номер патенту: 614
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: G06F 11/00, G06F 7/60
Мітки: формування, модулю, залишків, пристрій
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее 1-1 группу сумматоров (1 = n/q, n - разрядность числа, q - число сумматоров в группе) и блок свертки, выходы которого являются выходами устройства, прямые входы первого слагаемого и входы переноса сумматоров первой группы являются первой, второй и третьей группами информационного входов устройства, прямые входы первого слагаемого сумматоров (і-й группы. (і...
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Журавель Олександр Павлович, Дяченко Олег Миколайович
МПК: G06F 11/00
Мітки: аналізатор, багатоканальний, сигнатурний
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Пристрій для формування залишків по модулю
Номер патенту: 612
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: H03M 7/14
Мітки: пристрій, модулю, залишків, формування
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее (1-1) групп одноразрядных сумматоров (1= n/q, где n - разрядность числа, q - число сумматоров в группах) и блок свертки, причем прямые входы первого слагаемого одноразрядных сумматоров і-й группы (I = 1 - 1 - 1) соединены с входами соответствующих разрядов (і+1)-й группы информационного входа устройства, выход переноса к-го одноразрядного сумматора і-й...
Попередній патент: Пристрій розпізнавання радіолокаційних об’єктів
Наступний патент: Спосіб лікування внутрішньочеревних зрощень
Випадковий патент: Спосіб сівби ячменю дворядного в колекційному і селекційному розсадниках