Система для розкидування матеріалу у вітрових умовах та робоча машина, що містить вказану систему
Формула / Реферат
1. Система для розкидування матеріалу з робочої машини у вітрових умовах, яка містить:
розкидач, конструктивно виконаний для розкидування матеріалу; пристрій вводу, конструктивно виконаний для надання даних про вітрові умови, дані про вітрові умови включають напрямок вітру та швидкість вітру; контролер, з'єднаний із розкидачем та пристроєм вводу, причому контролер конструктивно виконаний для виконання програмних команд для керування розкидуванням матеріалу із робочої машини, виходячи із даних про вітрові умови із пристрою вводу, яка відрізняється тим, що містить пристрій контролю орієнтації, конструктивно виконаний для визначення орієнтації робочої машини, при цьому орієнтація характеризує напрямок за компасом, в якому машина рухається, контролер, з'єднаний із пристроєм контролю орієнтації та конструктивно виконаний для виконання програмних команд для керування розкидуванням матеріалу із робочої машини, виходячи із складової бічного вітру, що визначається, виходячи із орієнтації робочої машини та даних про вітрові умови.
2. Система за п. 1, яка відрізняється тим, що пристрій вводу конструктивно виконаний для прийому даних про вітрові умови, введених оператором робочої машини.
3. Система за п. 1, яка відрізняється тим, що контролер конструктивно виконаний для керування першою бічною границею розкидування й другою бічною границею розкидування, виходячи із складової бічного вітру.
4. Система за п. 3, яка відрізняється тим, що розкидач містить перше робоче колесо й друге робоче колесо, причому кожне із зазначеного першого робочого колеса й другого робочого колесаявляють собою робочі колеса з незалежним керуванням і змінною частотою обертання, причому розкидач конструктивно виконаний для розкидування матеріалу із зазначеної робочої машини за допомогою першого робочого колеса й другого робочого колеса, причому контролер конструктивно виконаний для незалежного керування частотою обертання першого робочого колеса й частотою обертання другого робочого колеса, щоб підтримувати першу бічну границю розкидування й другу бічну границю розкидування, виходячи із складової бічного вітру.
5. Система за п. 4, яка відрізняється тим, що контролер конструктивно виконаний для того, щоб збільшувати частоту обертання одного з робочих коліс - першого або другого, й одночасно зменшувати частоту обертання іншого з робочих коліс - першого або другого, щоб підтримувати зазначену першу бічну границю розкидування й зазначену другу бічну границю розкидування.
6. Система за п. 1, яка відрізняється тим, що пристрій контролю орієнтації являє собою приймач системи глобального позиціювання (GPS).
7. Робоча машина, зокрема комбайн, що містить систему за будь-яким з попередніх пунктів.
Текст
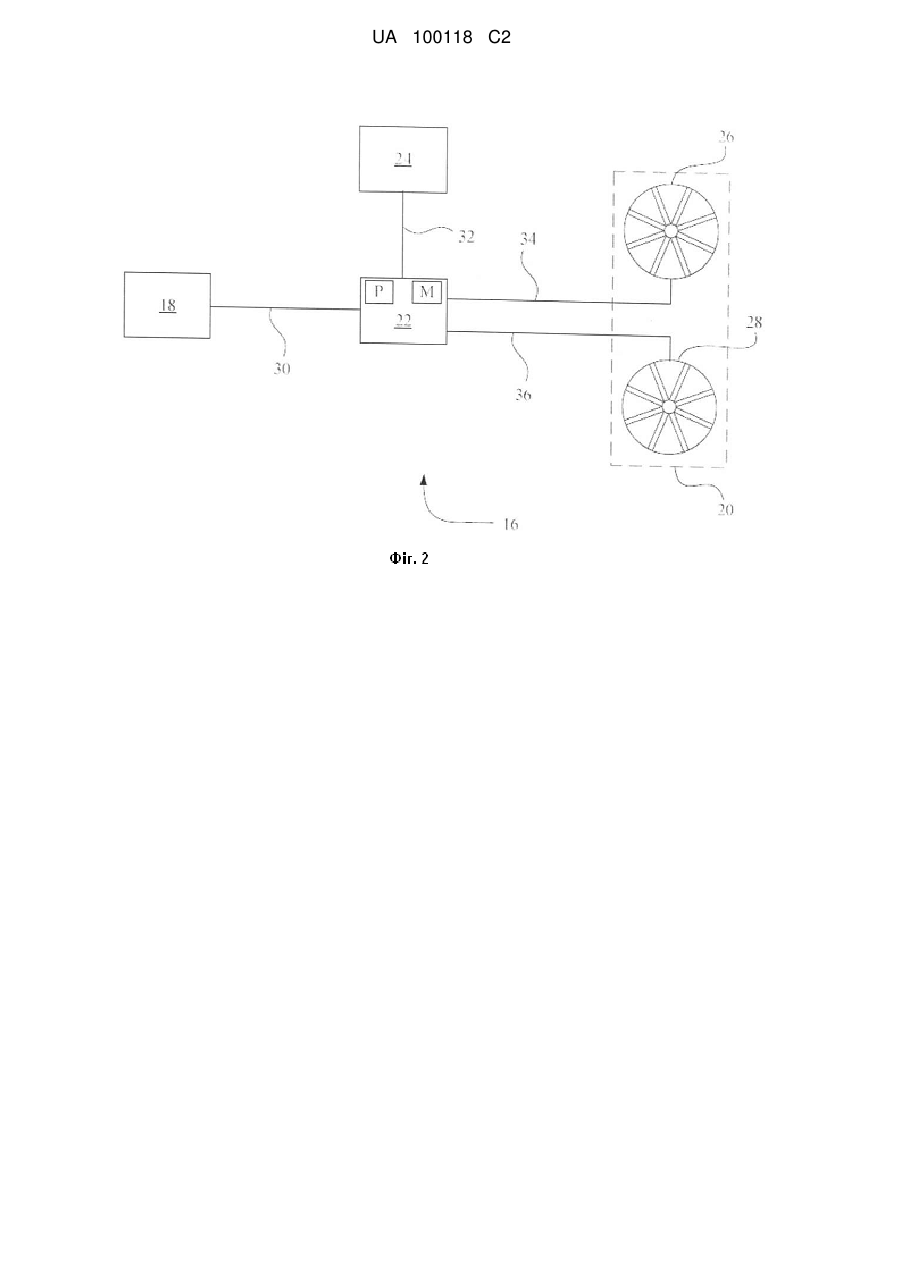
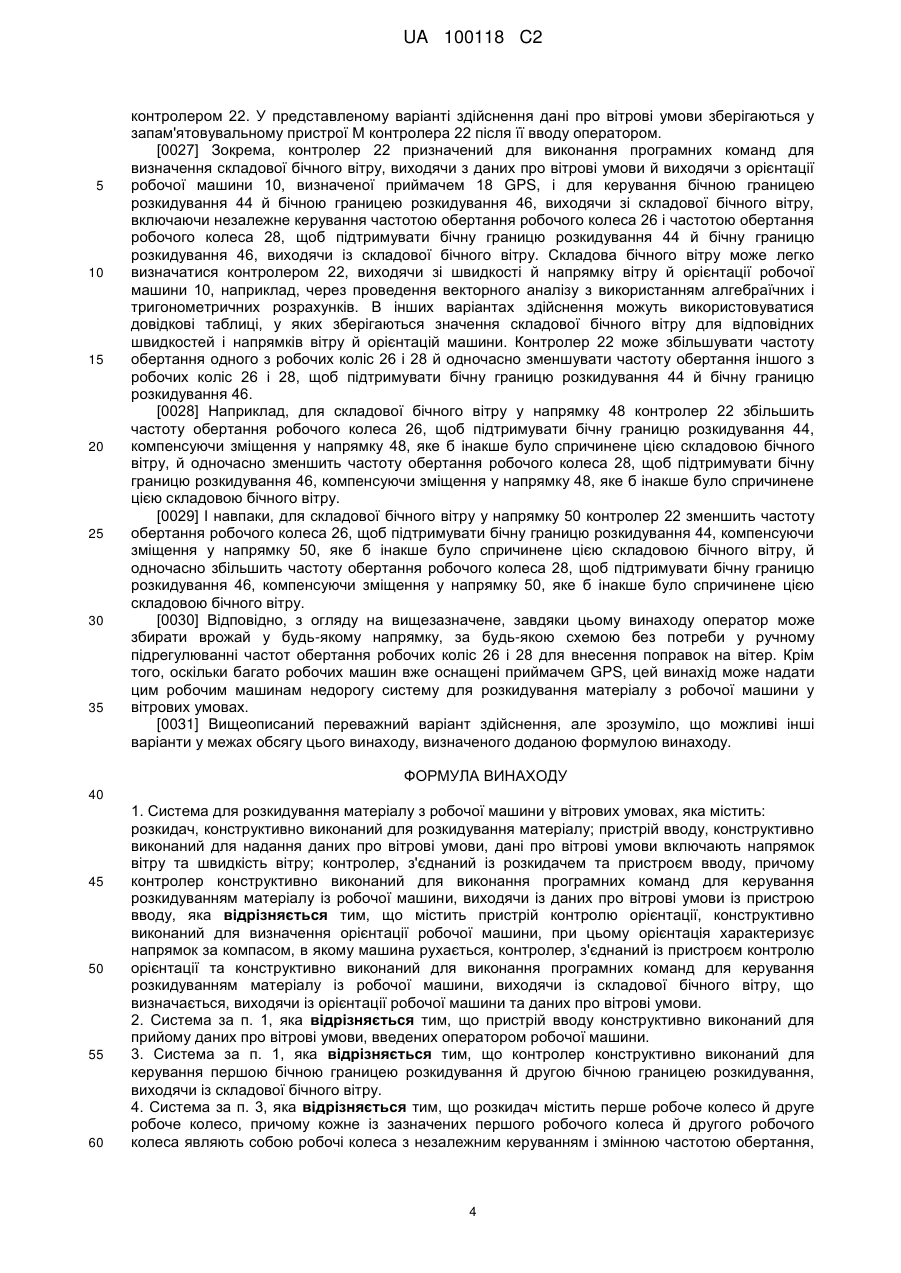
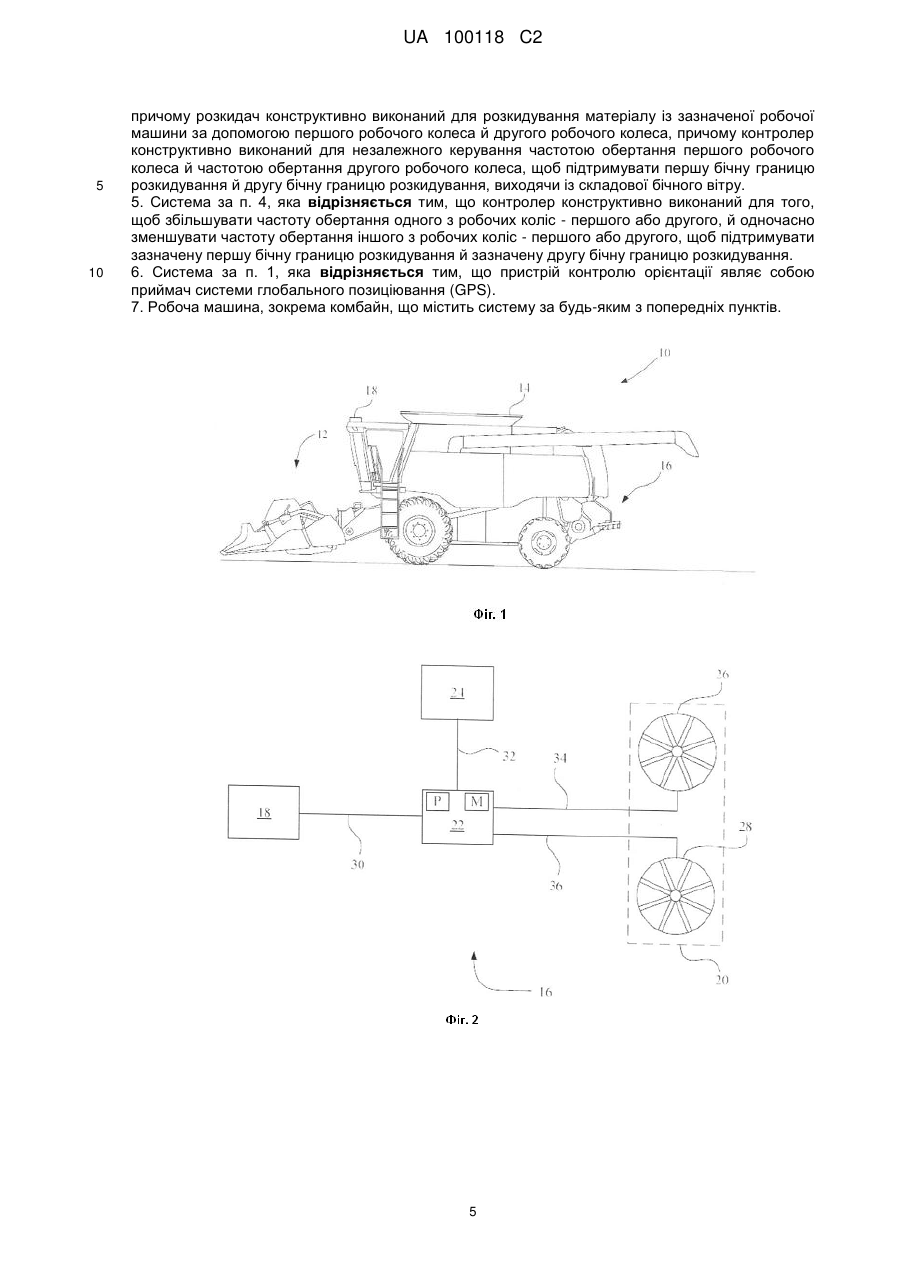
Реферат: Робоча машина містить розкидач, призначений для розкидування матеріалу з робочої машини; пристрій вводу, призначений для надання даних про вітрові умови; пристрій контролю орієнтації, призначений для визначення орієнтації робочої машини; й контролер, з'єднаний з розкидачем, пристроєм вводу й приймачем GPS. Контролер призначений для виконання програмних команд для керування розкидуванням матеріалу з робочої машини, виходячи з даних про вітрові умови з пристрою вводу й виходячи з орієнтації робочої машини. UA 100118 C2 (12) UA 100118 C2 UA 100118 C2 5 10 15 20 25 30 35 40 45 50 55 60 [0001] Цей винахід належить до робочої машини і, зокрема до системи й способу розкидування матеріалу, такого, як не зерновий матеріал, у вітрових умовах. [0002] У сільськогосподарській галузі для збирання зернових культур використовуються робочі машини, такі, як сільськогосподарські комбайни. Під час збиральних робіт типово такі робочі машини рухаються по лану зернових культур і використовують хедер спереду робочої машини для зрізання зернової культури. Після зрізання зерно з матеріалів зернових культур видаляється вузлами обмолоту й сепарації робочої машини, і потім передається у бункер робочої машини для тимчасового зберігання. У цих робочих машинах може використовуватися ще й розкидач, який приймає не зерновий матеріал, що виходить з вузлів обмолоту й сепарації і вивантажує не зерновий матеріал з робочої машини. Наприклад, для деяких зернових культур, наприклад кукурудзи, розкидач може використовуватися, на той час як для інших зернових культур, наприклад пшениці, розкидач може не використовуватися. [0003] У відомому рівні техніки комбайн оснащено датчиками кута вітру для вимірювання кута вітру щодо комбайна. На основі значень датчиків регулюється бічний кут пластин розкидача (ЕР 1163834 А1 і WO 03/005803 А1) або вимірюється лише значення швидкості бічного вітру, при цьому відповідно регулюється положення пластин розкидача (ЕР 0537621 А1) або швидкість обертання розкидача (ЕР 1570726 А1). [0004] Під час збиральних робіт бажано вивантажувати незерновий матеріал рівномірно по лану шляхом розподілу не зернового матеріалу по ширині прокосу хедера робочої машини. При цьому при зрізанні кожного прокосу зернової культури зерно видаляється й зберігається у бункері, а не зерновий матеріал обробляється й потім ізнов розподіляється по прокосу, звідки зернова культура була зрізана, позаду комбайна. При розподілі незернового матеріалу таким чином не зерновий матеріал рівномірно розподіляється по усьому лану. Крім того, бажано запобігти розкидуванню незернового матеріалу на ділянки ще не зібраної зернової культури, наприклад, на наступну смугу збирання, що прилягає до смуги, що збирається на разі. Наприклад, розкидування незернового матеріалу на ділянки ще не зібраної зернової культури може завадити роботі або зменшити ефективність хедера, вузлів обмолоту й сепарації, потенціально призводячи до меншого врожаю зерна. Наявність вітру може порушити потік незернового матеріалу, що виходить з розкидача, призводячи до того, що незерновий матеріал викидатиметься на ще не зібрані ділянки лану та/або залишаючи зібрані ділянки лану без незернового матеріалу. [0005] Отже, є потреба у робочій машині, системі й способі розкидування матеріалу, такого, як незерновий матеріал, у вітрових умовах. [0006] Пропонується робоча машина, система й спосіб розкидування матеріалу, такого, як незерновий матеріал, у вітрових умовах. [0007] В одному своєму вигляді винахід належить до робочої машини. Робоча машина містить розкидач, призначений для розкидування матеріалу з робочої машини; пристрій вводу, призначений для надання даних про вітрові умови; пристрій контролю орієнтації, призначений для визначення орієнтації робочої машини; й контролер, з'єднаний з розкидачем, пристроєм вводу й пристроєм контролю орієнтації. Контролер призначений для виконання програмних команд для керування розкидуванням матеріалу з робочої машини, виходячи з даних про вітрові умови з пристрою вводу й виходячи з орієнтації робочої машини. [0008] В іншому своєму вигляді винахід належить до системи для розкидування матеріалу з робочої машини у вітрових умовах. Система містить розкидач, призначений для розкидування матеріалу; пристрій вводу, призначений для надання даних про вітрові умови; пристрій контролю орієнтації, призначений для визначення орієнтації робочої машини; й контролер, з'єднаний з розкидачем, пристроєм вводу й пристроєм контролю орієнтації. Контролер призначений для виконання програмних команд для керування розкидуванням матеріалу з робочої машини, виходячи з даних про вітрові умови з пристрою вводу й орієнтації робочої машини. [0009] У ще одному своєму вигляді винахід належить до способу розкидування матеріалу з робочої машини у вітрових умовах. Робоча машина містить розкидач. Спосіб включає наступні стадії: стадію, на якій встановлюють першу бічну границю розкидування й другу бічну границю розкидування; стадію, на якій одержують дані про вітрові умови; стадію, на якій за допомогою пристрою контролю орієнтації визначають орієнтацію робочої машини; і стадію, на якій розкидачем керують, виходячи з даних про вітрові умови й орієнтації, щоб підтримувати першу бічну границю розкидування й другу бічну границю розкидування. [0010] Фіг. 1 ілюструє сільськогосподарську робочу машину, яка має систему для розкидування матеріалу, такого, як незерновий матеріал, відповідно до одного варіанта здійснення цього винаходу. 1 UA 100118 C2 5 10 15 20 25 30 35 40 45 50 55 60 [0011] Фіг. 2 схематично ілюструє систему розкидування незернового матеріалу з робочої машини, представленої на фіг. 1. [0012] Фіг. 3 ілюструє сільськогосподарську робочу машину, представлену на фіг. 1, під час виконання збиральних робіт і розкидування незернового матеріалу на лан, з якого зібрано врожай. Докладний опис винаходу [0013] На фіг. 1 схематично показана робоча машина 10 відповідно до одного варіанта здійснення цього винаходу. У представленому варіанті здійснення робочою машиною 10 є сільськогосподарський комбайн у вигляді самохідного комбайна, хоча зрозуміло, що цей винахід може бути застосований й до інших типів робочих машин у сільськогосподарській або не сільськогосподарській галузях, самохідних або ні. [0014] Робоча машина 10 може містити хедер 12, бункер 14 і систему 16, призначену для розкидування матеріалу з робочої машини 10, такого, як незерновий матеріал, наприклад, матеріалу, іншого, ніж зерно, одержаного під час зернозбиральних робіт. Крім того, робоча машина 10 містить пристрій контролю орієнтації 18, призначений для визначення орієнтації робочої машини 10. Пристрій контролю орієнтації 18 призначений для визначення курсової орієнтації, тобто напрямку за компасом, який описує напрямок, у якому робоча машина 10 повернена, наприклад, коли рухається під час збиральних робіт. [0015] Наприклад, пристрій контролю орієнтації 18 може бути у вигляді системи відстеження транспортних засобів. У представленому варіанті здійснення пристрій контролю орієнтації 18 є у вигляді приймача 18 системи глобального позиціювання (GPS), який використовується оператором робочої машини 10 для підвищення ефективності збиральних робіт. Приймач 18 GPS може також конструктивно виконуватися для визначення швидкості робочої машини 10, наприклад, під час збиральних робіт, а також орієнтації робочої машини 10 у напрямках у поздовжній вертикальній площині й крепу. Однак зрозуміло, що у межах об'єму цього винаходу можуть використовуватися й інші пристрої контролю орієнтації, наприклад, пристрої, основані на одержанні зображень за допомогою штучних супутників Землі та/або пристрої, основані на гіроскопі та/або вимірювачі прискорення, та/або інші бездротові системи, здатні надавати інформацію про орієнтацію робочої машини 10. У будь-якому випадку у представленому варіанті здійснення робоча машина 10 призначена для збирання зернових культур і рівномірного розподілу не зернового матеріалу по лану, з якого збирається врожай, із використанням інформації, одержаної з приймача 18 GPS. [0016] На фіг. 2 схематично показана система 16 для розкидування незернового матеріалу з робочої машини 10. Система 16 містить розкидач 20, контролер 22, пристрій вводу 24 і передбачає використання приймача 18 GPS. Розкидач 20 містить робоче колесо 26 і робоче колесо 28 і призначений для розкидування незернового матеріалу позаду робочої машини 10 під час збиральних робіт. Термін "робоче колесо" у значенні, у якому він вживається у цьому описі, включає використання подрібнювальних ціпів. [0017] Контролер 22 з'єднаний з приймачем 18 GPS каналом зв'язку 30, з'єднаний з пристроєм вводу 24 каналом зв'язку 32 і з'єднаний з розкидачем 20, зокрема, з робочим колесом 26 і робочим колесом 28 відповідними каналами зв'язку 34 і 36. У представленому варіанті здійснення канали зв'язку 30, 32, 34 й 36 являють собою цифрові дротові з'єднання, такі, як канали CAN (control area network, мережі площі регулювання), хоча в інших варіантах здійснення канали зв'язку 30, 32, 34 й 36 можуть бути будь-яким звичайним каналом, здатним передавати сигнали керування, наприклад аналогові та/абоцифрові дротові та/або бездротові канали. [0018] Контролер 22 містить процесор Ρ і запам'ятовувальний пристрій М, який зберігає серед іншого програмні команди, виконувані процесором Ρ для керування розкидуванням незернового матеріалу з робочої машини 10. [0019] Робочими колесами 26 і 28 можуть бути робочі колеса з незалежним керуванням, обертанням у протилежних напрямках і змінною частотою обертання, які під час розкидування можуть керуватися контролером 22 на основі сигналів, прийнятих в контролері 22 з приймача 18 GPS і пристрою вводу 24. Кожне з робочих коліс 26 і 28 містить вісім лопатей 38 робочого колеса, що проходять донизу, хоча у межах об'єму цього винаходу можуть використовуватися інші кількості й орієнтації лопатей. Кожне з робочих коліс 26 і 28 може приводитися гідравлічним двигуном (не показаним) до обертання навколо осі, яка є практично вертикальною, але яка може дещо нахилятися для покращення характеристик розкидування. В інших варіантах здійснення для приводу робочих коліс 26 і 28 можуть використовуватися електричні двигуни та/або інші рушійні пристрої та/або трансмісії. У представленому варіанті здійснення робоче колесо 26 обертається у напрямку проти годинникової стрілки 40, якщо дивитися зверху, а 2 UA 100118 C2 5 10 15 20 25 30 35 40 45 50 55 робоче колесо 28 - у напрямку за годинниковою стрілкою 42. У будь-якому випадку робочі колеса 26 і 28 призначені для прийому незернового матеріалу 106 з робочої машини 10 й розподілу незернового матеріалу 106 позаду робочої машини 10 при її пересуванні по лапу 100 під час збиральних робіт. [0020] Пристрій вводу 24 призначений для передачі вхідної інформації у контролер 22, включаючи дані про вітрові умови, такі, як швидкість і напрямок вітру. У представленому варіанті здійснення пристрій вводу 24 є у вигляді клавіатури, призначеної для прийому даних про вітрові умови як ввід оператором робочої машини 10 і передачі даних про вітрові умови в контролер 22. [0021] Якщо звернутися тепер до фіг. 3, на ній представлена робоча машина 10 під час збиральних робіт на лану зернової культури 100, причому робоча машина 10 скошує смугу зернової культури 102. Під час збиральних робіт робоча машина 10 пересувається по лану зернової культури 100 під керуванням оператора, і зернова культура 102 зрізується з лану 100 хедером 12. Після зрізання зернової культури 102 робоча машина 10 відділяє зерно 104 від не зернового матеріалу 106 (матеріалу, іншого, ніж зерно), наприклад, у вузлах обмолоту й сепарації (не показаних), і зберігає зерно 104 у бункері 14 до зручного часу для вивантаження й передачі зерна 104 у транспортний засіб та/або на склад, наприклад, на зерновий елеватор. Під час збиральних робіт незерновий матеріал розподіляється по лану 100 за допомогою розкидача 20 одночасно із новим збиранням зернової культури 102. Зрозуміло, що перед розкидуванням по лану 100 розкидачем 20 незерновий матеріал 106 може оброблятися або подрібнюватися. [0022] У представленому варіанті здійснення розкидач 20 знаходиться у задній частині робочої машини 10. Однак зрозуміло, що в межах об'єму цього винаходу можна використовувати інші місця розміщення розкидача. У будь-якому випадку розкидач 20 розкидає не зерновий матеріал 106 за допомогою робочих коліс 26 і 28 на поточну смугу, що зрізується у зерновій культурі 102 хедером 12, щоб таким чином рівномірно розподіляти не зерновий матеріал 106 по лану 100. [0023] Система 16 настроєна так, що під час збиральних робіт у безвітряних умовах робочі колеса 26 і 28 розкидатимуть незерновий матеріал 106 до бічних границь розкидування 44 й 46 відповідно, які переважно відповідають ширині W смуги, скошеної у зерновій культурі 102 хедером 12. Для того щоб розширити бічні границі розкидування далі від робочої машини 10, частоти обертання робочих коліс збільшуються, а для того, щоб звузити бічні границі розкидування ближче до робочої машини 10, - зменшуються. Частота обертання робочих коліс 26 і 28 може спочатку встановлюватися оператором робочої машини 10 залежно від умов зернової культури, наприклад, тип зернової культури, вологість тощо, так, щоб встановити бічні границі розкидування 44 й 46 у потрібному місці. Однак наявність вітру, який має складову бічного вітру (складову швидкості вітру у напрямку, перпендикулярному напрямку повернення / руху робочої машини 10), зміщатиме бічні границі розкидування 44 й 46 у напрямку складової бічного вітру, призводячи до того, що незерновий матеріал 106 розкидатиметься на небажані ділянки, скажімо, на зернову культуру 102 у наступній смузі збирання або поверх незернового матеріалу з попередньо скошеної смуги, і може залишити ділянки поточної смуги прокосу без не зернового матеріалу 106. [0024] Наприклад, складова бічного вітру у напрямку 48 змістить бічну границю розкидування 44 у напрямку 48 до робочої машини 10, залишаючи смужку на краю смуги прокосу без незернового матеріалу 106, одночасно зміщуючи бічну границю розкидування 46 від робочої машини 10 у напрямку 48, приводячи до перекриття незернового матеріалу 106 з попередньо скошеною смугою. [0025] 3 іншого боку, складова бічного вітру у напрямку 50 змістить бічну границю розкидування 44 у напрямку 50 від робочої машини 10 і на зернову культуру 102 у наступній смузі збирання, таким чином збільшуючи навантаження на робочу машину 10 і зменшуючи ефективність збиральних робіт на цій смузі, одночасно зміщуючи бічну границю розкидування 46 до робочої машини 10 у напрямку 48, залишаючи смужку на краю поточної смуги прокосу без незернового матеріалу 106. [0026] 3 огляду на вищезазначене, в одному аспекті цього винаходу контролер 22 призначений для виконання програмних команд для керування розгадуванням незернового матеріалу 106 з робочої машини 10, виходячи з даних про вітрові умови, наприклад, прийнятих з пристрою вводу 24, й виходячи з орієнтації робочої машини 10, визначеної приймачем 18 GPS. Дані про вітрові умови можуть включати дані про швидкість вітру й дані про напрямок вітру, наприклад, одержані оператором з інформації про прогноз погоди або інших джерел даних про вітрові умови, який вводить ці дані в пристрій вводу 24 для використання 3 UA 100118 C2 5 10 15 20 25 30 35 контролером 22. У представленому варіанті здійснення дані про вітрові умови зберігаються у запам'ятовувальному пристрої Μ контролера 22 після її вводу оператором. [0027] Зокрема, контролер 22 призначений для виконання програмних команд для визначення складової бічного вітру, виходячи з даних про вітрові умови й виходячи з орієнтації робочої машини 10, визначеної приймачем 18 GPS, і для керування бічною границею розкидування 44 й бічною границею розкидування 46, виходячи зі складової бічного вітру, включаючи незалежне керування частотою обертання робочого колеса 26 і частотою обертання робочого колеса 28, щоб підтримувати бічну границю розкидування 44 й бічну границю розкидування 46, виходячи із складової бічного вітру. Складова бічного вітру може легко визначатися контролером 22, виходячи зі швидкості й напрямку вітру й орієнтації робочої машини 10, наприклад, через проведення векторного аналізу з використанням алгебраїчних і тригонометричних розрахунків. В інших варіантах здійснення можуть використовуватися довідкові таблиці, у яких зберігаються значення складової бічного вітру для відповідних швидкостей і напрямків вітру й орієнтацій машини. Контролер 22 може збільшувати частоту обертання одного з робочих коліс 26 і 28 й одночасно зменшувати частоту обертання іншого з робочих коліс 26 і 28, щоб підтримувати бічну границю розкидування 44 й бічну границю розкидування 46. [0028] Наприклад, для складової бічного вітру у напрямку 48 контролер 22 збільшить частоту обертання робочого колеса 26, щоб підтримувати бічну границю розкидування 44, компенсуючи зміщення у напрямку 48, яке б інакше було спричинене цією складовою бічного вітру, й одночасно зменшить частоту обертання робочого колеса 28, щоб підтримувати бічну границю розкидування 46, компенсуючи зміщення у напрямку 48, яке б інакше було спричинене цією складовою бічного вітру. [0029] І навпаки, для складової бічного вітру у напрямку 50 контролер 22 зменшить частоту обертання робочого колеса 26, щоб підтримувати бічну границю розкидування 44, компенсуючи зміщення у напрямку 50, яке б інакше було спричинене цією складовою бічного вітру, й одночасно збільшить частоту обертання робочого колеса 28, щоб підтримувати бічну границю розкидування 46, компенсуючи зміщення у напрямку 50, яке б інакше було спричинене цією складовою бічного вітру. [0030] Відповідно, з огляду на вищезазначене, завдяки цьому винаходу оператор може збирати врожай у будь-якому напрямку, за будь-якою схемою без потреби у ручному підрегулюванні частот обертання робочих коліс 26 і 28 для внесення поправок на вітер. Крім того, оскільки багато робочих машин вже оснащені приймачем GPS, цей винахід може надати цим робочим машинам недорогу систему для розкидування матеріалу з робочої машини у вітрових умовах. [0031] Вищеописаний переважний варіант здійснення, але зрозуміло, що можливі інші варіанти у межах обсягу цього винаходу, визначеного доданою формулою винаходу. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Система для розкидування матеріалу з робочої машини у вітрових умовах, яка містить: розкидач, конструктивно виконаний для розкидування матеріалу; пристрій вводу, конструктивно виконаний для надання даних про вітрові умови, дані про вітрові умови включають напрямок вітру та швидкість вітру; контролер, з'єднаний із розкидачем та пристроєм вводу, причому контролер конструктивно виконаний для виконання програмних команд для керування розкидуванням матеріалу із робочої машини, виходячи із даних про вітрові умови із пристрою вводу, яка відрізняється тим, що містить пристрій контролю орієнтації, конструктивно виконаний для визначення орієнтації робочої машини, при цьому орієнтація характеризує напрямок за компасом, в якому машина рухається, контролер, з'єднаний із пристроєм контролю орієнтації та конструктивно виконаний для виконання програмних команд для керування розкидуванням матеріалу із робочої машини, виходячи із складової бічного вітру, що визначається, виходячи із орієнтації робочої машини та даних про вітрові умови. 2. Система за п. 1, яка відрізняється тим, що пристрій вводу конструктивно виконаний для прийому даних про вітрові умови, введених оператором робочої машини. 3. Система за п. 1, яка відрізняється тим, що контролер конструктивно виконаний для керування першою бічною границею розкидування й другою бічною границею розкидування, виходячи із складової бічного вітру. 4. Система за п. 3, яка відрізняється тим, що розкидач містить перше робоче колесо й друге робоче колесо, причому кожне із зазначених першого робочого колеса й другого робочого колеса являють собою робочі колеса з незалежним керуванням і змінною частотою обертання, 4 UA 100118 C2 5 10 причому розкидач конструктивно виконаний для розкидування матеріалу із зазначеної робочої машини за допомогою першого робочого колеса й другого робочого колеса, причому контролер конструктивно виконаний для незалежного керування частотою обертання першого робочого колеса й частотою обертання другого робочого колеса, щоб підтримувати першу бічну границю розкидування й другу бічну границю розкидування, виходячи із складової бічного вітру. 5. Система за п. 4, яка відрізняється тим, що контролер конструктивно виконаний для того, щоб збільшувати частоту обертання одного з робочих коліс - першого або другого, й одночасно зменшувати частоту обертання іншого з робочих коліс - першого або другого, щоб підтримувати зазначену першу бічну границю розкидування й зазначену другу бічну границю розкидування. 6. Система за п. 1, яка відрізняється тим, що пристрій контролю орієнтації являє собою приймач системи глобального позиціювання (GPS). 7. Робоча машина, зокрема комбайн, що містить систему за будь-яким з попередніх пунктів. 5 UA 100118 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for broadcasting material in windy conditions and a working machine comprising the stated system
Автори англійськоюCherverka Kirk J., Pearson Mark L.
Назва патенту російськоюСистема для разбраскывания материала в ветровых условиях и рабочая машина, содержащая указанную систему
Автори російськоюЧерверка Кирк Дж., Пирсон Марк Л.
МПК / Мітки
МПК: A01D 41/12, A01D 41/127, A01C 17/00
Мітки: умовах, містить, робоча, вітрових, система, систему, матеріалу, розкидування, машина, вказану
Код посилання
<a href="https://ua.patents.su/8-100118-sistema-dlya-rozkiduvannya-materialu-u-vitrovikh-umovakh-ta-robocha-mashina-shho-mistit-vkazanu-sistemu.html" target="_blank" rel="follow" title="База патентів України">Система для розкидування матеріалу у вітрових умовах та робоча машина, що містить вказану систему</a>
Сільськогосподарська робоча машина, спосіб розподілу потоку маси, що вивантажується із сільськогосподарської збиральної машини, та сільськогосподарська робоча машина для здійснення способу
Номер патенту: 75575
Опубліковано: 15.05.2006
Автори: Хайд'янн Франц, Кюн Бодо
МПК: A01D 33/10
Мітки: машини, способу, потоку, сільськогосподарсько, машина, вивантажується, сільськогосподарська, збиральної, робоча, спосіб, маси, розподілу, здійснення
Формула / Реферат:
1. Сільськогосподарська робоча машина щонайменше з одним робочим органом для обробки збираної маси і приєднаним до цього робочого органа першим транспортуючим збирану масу пристроєм, а також щонайменше ще з одним додатковим транспортуючим збирану масу пристроєм, причому щонайменше два транспортуючих збирану масу пристрої розташовані таким чином, що утворюють між собою прохідний для збираної маси проміжок і забезпечують протилежні один одному...
Робоча машина та конструкція підвіски для задніх самоустановлюваних коліс на робочій машині
Номер патенту: 98769
Опубліковано: 25.06.2012
Автори: Слоун Чарльз Скотт, Розенбалм Аллан Уеслі, Бебернес Томас Даріл
МПК: B60G 11/00, A01D 37/00
Мітки: коліс, конструкція, самоустановлюваних, робочий, машина, підвіски, машини, задніх, робоча
Формула / Реферат:
1. Робоча машина, яка містить:раму; принаймні одне ведуче колесо, що переноситься зазначеною рамою; принаймні одну задню вісь, жорстко встановлену на зазначеній рамі нерухомо відносно неї, і принаймні один вузол самоустановлюваного колеса, причому кожен зазначений вузол самоустановлюваного колеса містить вал, важіль колеса, підвіску і самоустановлюване колесо, зазначений вал із можливістю обертання з'єднаний із зовнішнім кінцем...
Самохідна сільськогосподарська робоча машина
Номер патенту: 99255
Опубліковано: 10.08.2012
Автори: Вількен Андреас, Баумгартен Йоахім, Бусманн Крістоф, Еггенхаус Георг
МПК: A01D 41/00
Мітки: самохідна, сільськогосподарська, машина, робоча
Формула / Реферат:
1. Самохідна сільськогосподарська робоча машина (2), яка містить робочі органи з регульованими робочими параметрами, і яка пересувається зі швидкістю ходу, причому швидкість ходу автоматично регулюється в залежності від щонайменше одного параметра збираного врожаю і/або одного робочого параметра робочої машини (2) за допомогою регулятора руху (21), та з, як мінімум, одним керуючо-, обслуговуючо-індикаторним блоком (22, 47), за допомогою...
Система для введення біологічно активної або хімічної речовини на відносно великий об’єм культури, фуражно-косарний агрегат, який містить цю систему, спосіб введення відносно малого об’єму біологічно активної а
Номер патенту: 87099
Опубліковано: 25.06.2009
Автори: Лебеда Джозеф Р., Оеппінг Джеймс М., Робертс Джеффрі С.
МПК: A01D 43/00, A01F 15/00, A01M 7/00, B05B 7/00
Мітки: фуражно-косарний, система, біологічно, великий, малого, об'єму, відносної, активної, систему, агрегат, хімічної, введення, культури, об'єм, спосіб, містить, речовини
Формула / Реферат:
1. Система для введення біологічно активної або хімічної речовини на відносно великий об'єм культури, яка містить з'єднані між собою:a) випускний отвір (12) з розпилювальним соплом, який може бути встановлений біля сільськогосподарської культури, причому випускний отвір розташований на одному кінці рідинного трубопроводу (14);b) приймач (30), приєднаний з протилежного кінця рідинного трубопроводу для утримання контейнера (20) із...
Робоча машина (варіанти) та рульовий блок для робочої машини
Номер патенту: 98619
Опубліковано: 11.06.2012
Автори: Дрегер Тімоті К., Бебернес Томас Даріл, Ланг Ерік Райан, Ротол Девід Вінсент
МПК: B62D 7/00, B62D 5/00, B60B 33/00, A01B 69/00
Мітки: робоча, машини, рульовий, машина, блок, робочої, варіанти
Формула / Реферат:
1. Робоча машина, яка містить:раму; принаймні одне ведуче колесо, розташоване на зазначеній рамі; принаймні один вузол самовстановлювального колеса, розташований на вказаній рамі за допомогою поворотного вала, який визначає в цілому вертикальну вісь, навколо якої вузол самовстановлювального колеса може повертатися на 360°; тапринаймні один допоміжний засіб повороту, причому кожний вказаний допоміжний засіб повороту з'єднаний з...
Попередній патент: Сільськогосподарська збиральна машина та секція молотильного апарата для використання у сільськогосподарській збиральній машині
Наступний патент: Застосування 3-альфа-андростандіолу в поєднанні з агоністом 5-нt1а для лікування сексуальної дисфункції
Випадковий патент: Спосіб рентгенолюмінесцентної дозиметрії кварцу