Самохідна сільськогосподарська робоча машина
Номер патенту: 99255
Опубліковано: 10.08.2012
Автори: Вількен Андреас, Баумгартен Йоахім, Еггенхаус Георг, Бусманн Крістоф
Формула / Реферат
1. Самохідна сільськогосподарська робоча машина (2), яка містить робочі органи з регульованими робочими параметрами, і яка пересувається зі швидкістю ходу, причому швидкість ходу автоматично регулюється в залежності від щонайменше одного параметра збираного врожаю і/або одного робочого параметра робочої машини (2) за допомогою регулятора руху (21), та з, як мінімум, одним керуючо-, обслуговуючо-індикаторним блоком (22, 47), за допомогою якого можуть встановлюватися та показуватися параметри збираного врожаю і/або робочі параметри робочої машини (2), яка відрізняється тим, що керуючо-, обслуговуючо-індикаторний блок (22, 47) безпосередньо показує оператору робочої машини параметр збираного врожаю і/або робочий параметр робочої машини (2), який актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21).
2. Самохідна сільськогосподарська робоча машина (2) за п. 1, яка відрізняється тим, що параметр збираного врожаю і/або робочий параметр робочої машини (2), який актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21), показується у керуючо-, обслуговуючо-індикаторному блоці (22, 47) як піктограма (3).
3. Самохідна сільськогосподарська робоча машина (2) за пп. 1 або 2, яка відрізняється тим, що параметр збираного врожаю і/або робочий параметр робочої машини (2), який актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21), показується у керуючо-, обслуговуючо-індикаторному блоці (22, 47) як позначення.
4. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що індикація параметра збираного врожаю і/або робочого параметра робочої машини (2), який обмежує швидкість руху за допомогою регулятора руху (21), відбувається в окремому вікні (33) монітора керуючо-, обслуговуючо-індикаторного блока (22, 47).
5. Самохідна сільськогосподарська робоча машина (2) за п. 4, яка відрізняється тим, що окреме вікно (33) монітора щонайменше періодично у часі і/або обмеженим діапазоном перекриває інші вікна (45) монітора керуючо-, обслуговуючо-індикаторного блока (22, 47).
6. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що для щонайменше одного параметра збираного врожаю і/або робочого параметра робочої машини (2) може бути визначено кожного разу як мінімум одне нижнє регульоване граничне значення або одне верхнє регульоване граничне значення чи нижнє та верхнє регульовані граничні значення.
7. Самохідна сільськогосподарська робоча машина (2) за п. 6, яка відрізняється тим, що відповідні регульовані граничні значення можуть бути задані і/або змінюватися за допомогою керуючо-, обслуговуючо-індикаторного блока (22, 47).
8. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що оператору робочої машини (2) у керуючо-, обслуговуючо-індикаторному блоці (22, 47) показується кожного разу як параметр збираного врожаю і/або робочий параметр робочої машини (2), що актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21)., так і визначені для відповідного параметра збираного врожаю і/або робочого параметра робочої машини регульовані граничні значення.
9. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є швидкість ходу.
10. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є завантаження двигуна.
11. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є стан одного або кількох робочих агрегатів і/або робочих середовищ.
12. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є продуктивність пристрою (14) очищення збираного врожаю робочої машини (2).
13. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є продуктивність пристрою сепарації збираного врожаю робочої машини (2).
14. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є процес перевантаження збираного врожаю на зовнішній віддалений транспортний засіб.
15. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є реєстрована електронною системою робочої машини (2) відстань до кінця або початку рядка та, відповідно, поля.
16. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що параметром збираного врожаю, який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є пропускна кількість збираного врожаю, що подається робочим органам робочої машини (2).
17. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що параметром збираного врожаю, який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є складова частка зернового матеріалу у масі збираного врожаю, що знаходиться у пристрої переробки сходу з решіт робочої машини (2).
18. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що параметром збираного врожаю, який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є обсяг маси збираного врожаю, що знаходиться у пристрої переробки сходу з решіт робочої машини (2).
19. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що регулювання швидкості руху за допомогою регулятора руху (21), відбувається автоматично завжди по регульованому граничному значенню, обумовленому обмежувально діючим параметром збираного врожаю і/або робочим параметром робочої машини (2).
20. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочою машиною (2) є зернозбиральний комбайн (1).
Текст
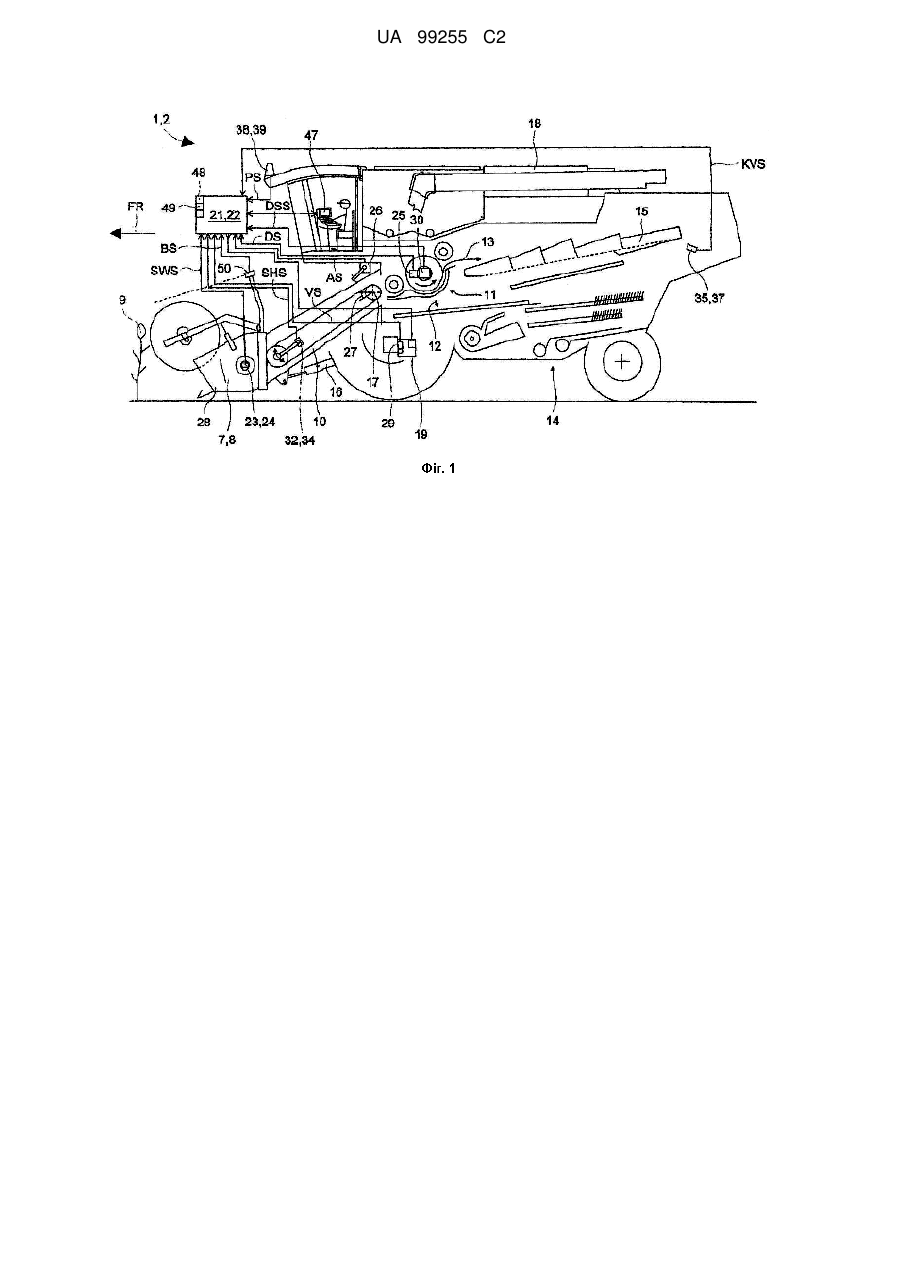
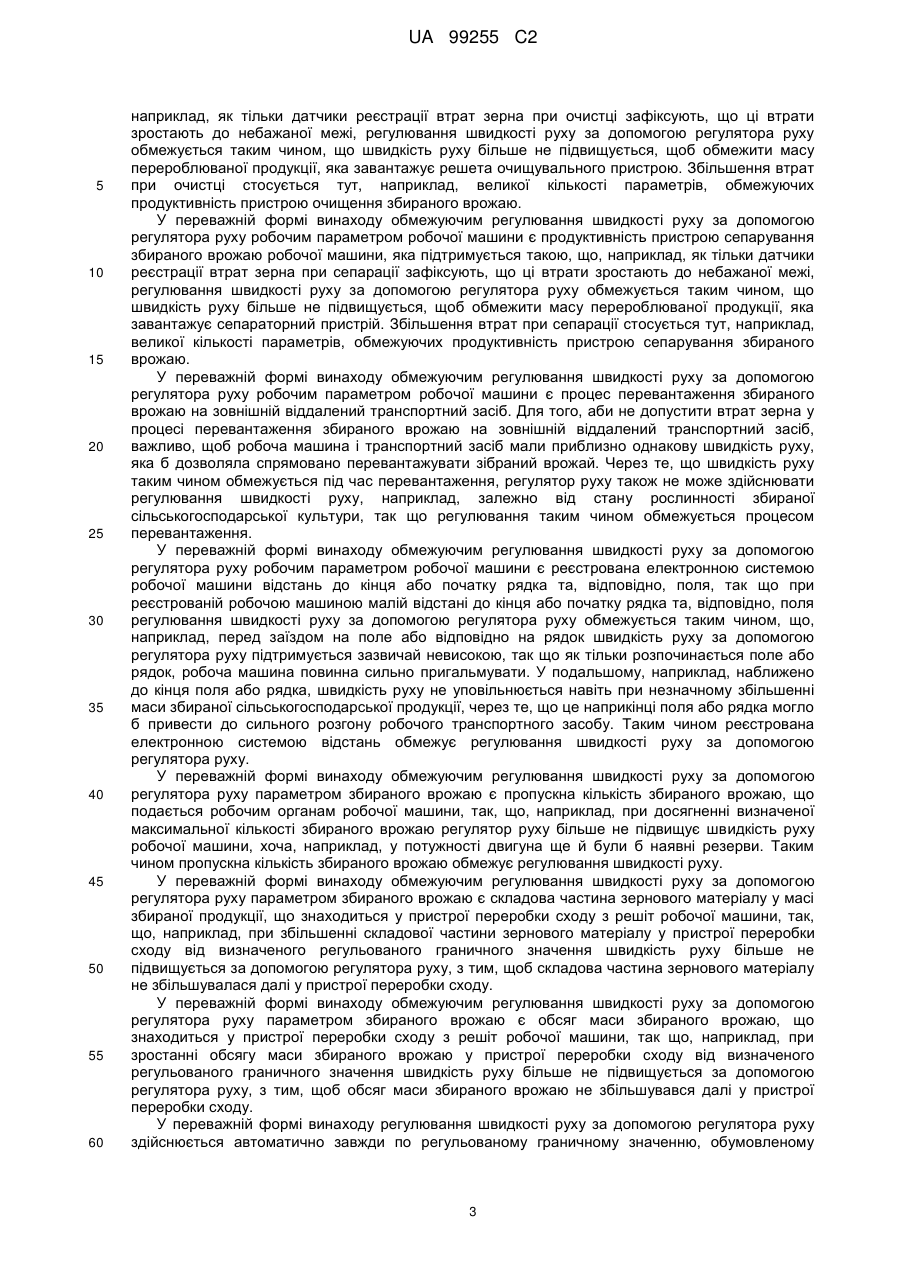
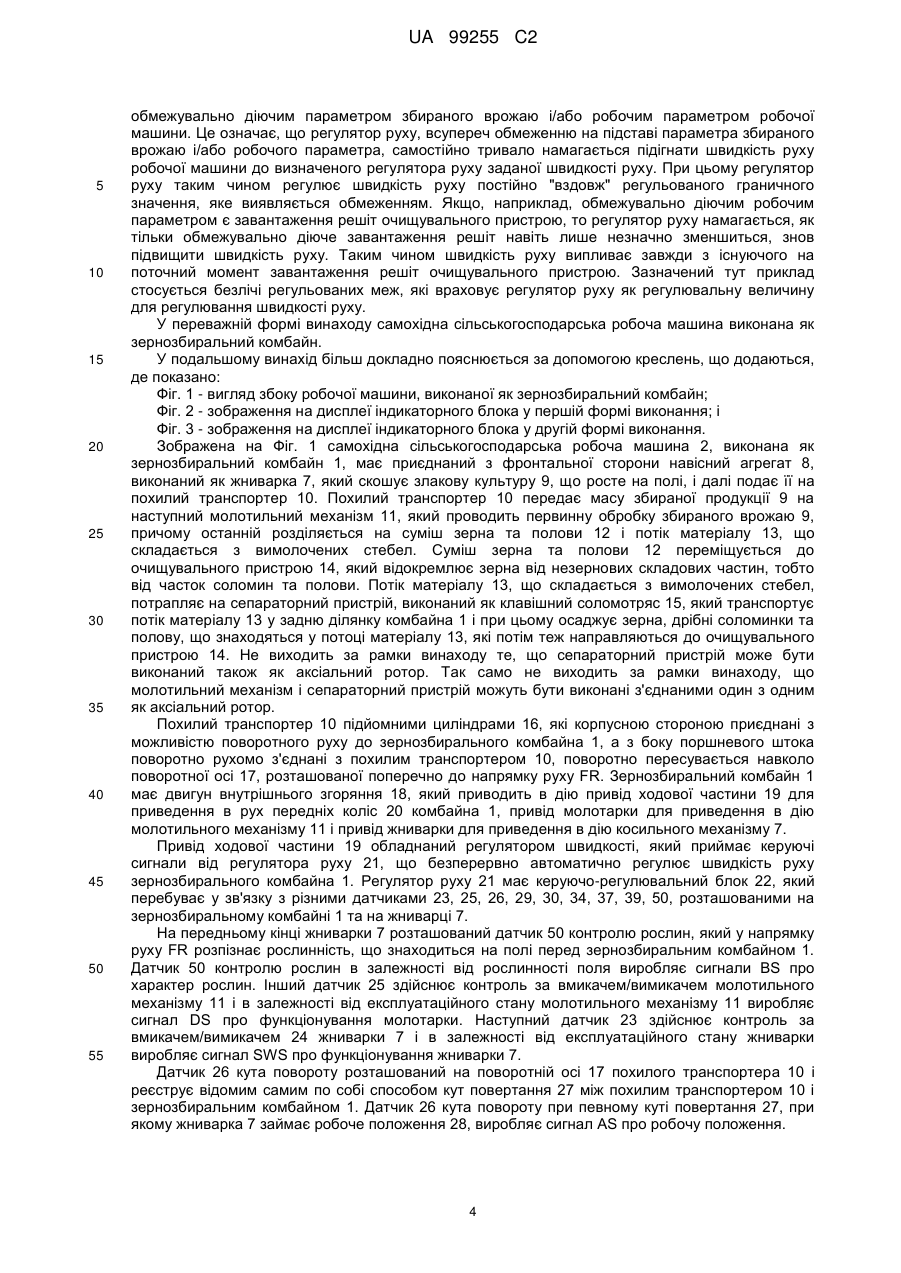
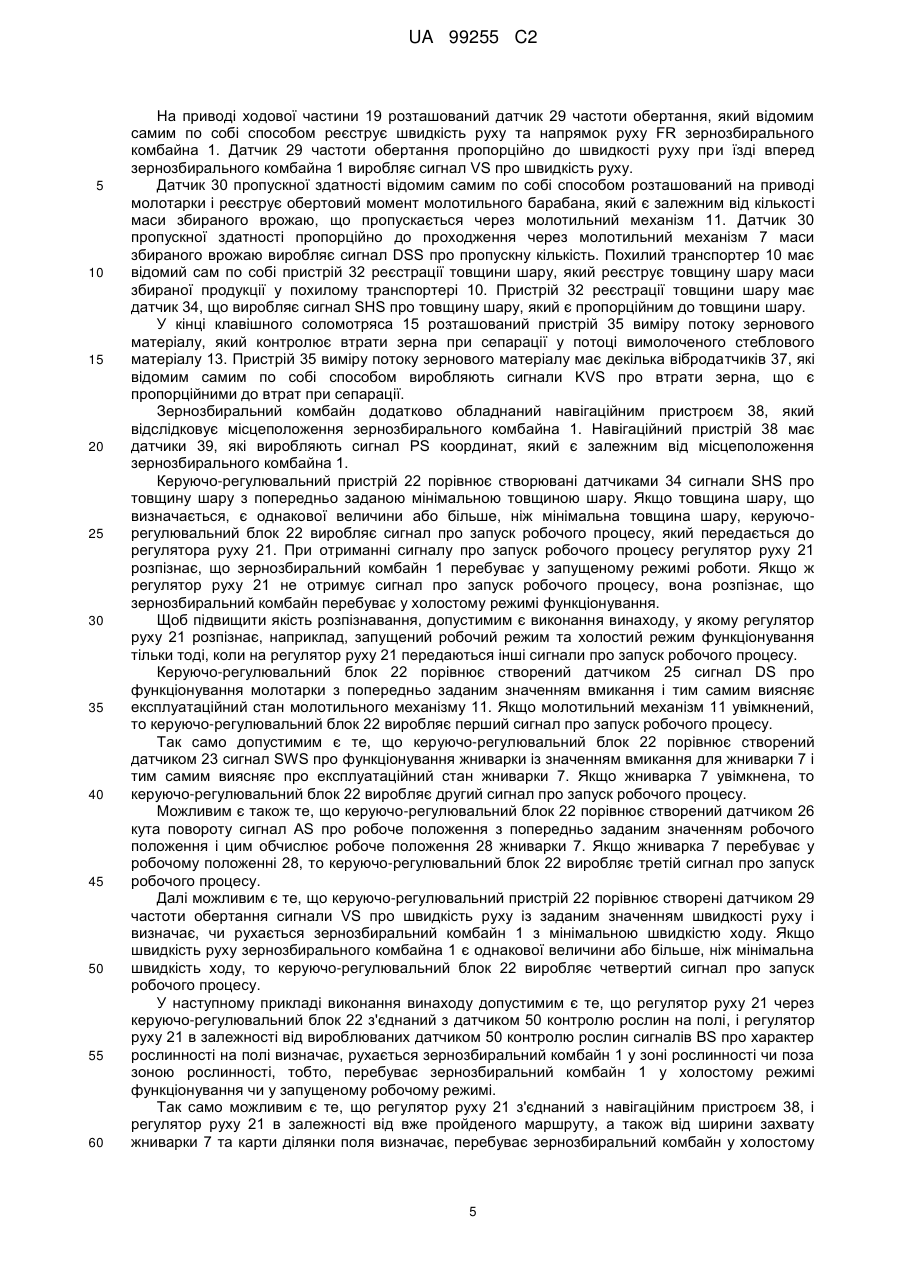
Реферат: Самохідна сільськогосподарська робоча машина (2) містить робочі органи з регульованими робочими параметрами, і яка пересувається зі швидкістю ходу, причому швидкість ходу автоматично регулюється в залежності від щонайменше одного параметра збираного врожаю і/або одного робочого параметра робочої машини (2) за допомогою регулятора руху (21), та з, як мінімум, одним керуючо-, обслуговуючо-індикаторним блоком (22, 47), за допомогою якого можуть встановлюватися та показуватися параметри збираного врожаю і/або робочі параметри робочої машини (2). Оператору робочої машини у керуючо-, обслуговуючо-індикаторному блоці (22, 47) безпосередньо показується параметр збираного врожаю і/або робочий параметр робочої машини (2), який актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21). UA 99255 C2 (12) UA 99255 C2 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до самохідної сільськогосподарської робочої машини за обмежувальною частиною пункту 1 патентної формули. У патентній заявці ЕР 1 321 025 А1 опубліковано відомості про виконану як зернозбиральний комбайн самохідну сільськогосподарську робочу машину з автоматичним керуючим пристроєм для регулювання регулятору руху. Керуючий пристрій змінює обгінну швидкість для регулювання пропускної здатності зернозбирального комбайна і активізується, як тільки пристрій автоматичної реєстрації товщини шару підтверджує надходження збираної сільськогосподарської продукції у транспортувальний пристрій комбайна. З поданої заявником патентної заявки DE 10 2004 059 543 А1 відома самохідна сільськогосподарська робоча машина, у якій швидкість руху регулюється за допомогою регулятора руху залежно від різних робочих ситуацій за різними стратегіями руху. Переваги та принцип дії системи регулювання швидкості руху за допомогою регулятора руху описані у названій німецькій патентній заявці, так що її відмітні ознаки сприймаються з посиланням на цю заявку. Досліди на практиці однак засвідчили, що регулювання швидкості ходу за допомогою регулятора руху для регулювання пропускної здатності самохідної сільськогосподарської робочої машини обмежується різними параметрами збираного врожаю і/або робочими параметрами робочої машини. Отже, наприклад, це виглядало б так, що при дуже рідкій рослинності злакової культури маса збираного врожаю, що пропускається через перероблювальні механізми, зменшувалася б, і регулятор руху неминуче змушений був підвищувати швидкість руху. Для того, щоб забезпечити стабільність руху і тим самим надійність робочої машини, вона однак експлуатується лише з певною максимальною швидкістю під час проведення робіт. Оскільки тепер підвищення швидкості руху досягає максимально допустимої робочої швидкості, регулятор руху не може далі підвищувати швидкість руху. Через те, що оператор робочої машини тепер констатує, що бажана пропускна здатність не відповідає досягнутій на поточний момент пропускній здатності, він намагається підігнати робочі параметри робочої машини згідно з фактично існуючою пропускною здатністю, щоб результат роботи не зазнавав негативного впливу. Це потребує однак дуже ґрунтовних фахових знань оператора. Крім того, максимально допустима робоча швидкість є лише однією з безлічі обмежувальних ознак для регулювання швидкості руху за допомогою регулятора руху, так що оператор опиняється перед проблемою, яка полягає у тому, що він не знає, які робочі параметри робочої машини він переважно має підстроїти, щоб досягти оптимального результату роботи. Задачею даного винаходу є позбутися описаних недоліків рівня техніки і, зокрема, удосконалити самохідну сільськогосподарську робочу машину згідно з обмежувальною частиною пункту 1 формули таким чином, щоб оператор робочої машини при регулюванні швидкості руху за допомогою регулятора руху мав у розпорядженні цілеспрямовану інформацію для підтримання режиму регулятора руху. Ця задача, згідно з винаходом, вирішується відмітними ознаками пункту 1 формули. Внаслідок того, що оператору робочої машини у керуючо-, обслуговуючо-індикаторному блоці безпосередньо показується параметр збираного врожаю і/або робочий параметр робочої машини, який актуально обмежує регулювання швидкості руху за допомогою регулятора руху, оператор своєчасно та цілеспрямовано отримує постійну інформацію про те, який параметр збираного врожаю і/або робочий параметр робочої машини обмежувально впливає на регулювання швидкості руху регулятора руху, так що він може цілеспрямовано вирішувати, підстроїти йому окремі робочі параметри на змінену швидкість руху і тим самим, наприклад, на змінену пропускну кількість збираної продукції, чи залишити встановлені параметри незмінними, тому що очікувані впливи на результат роботи робочої машини не є надто значними. Щоб доступно повідомити різні обмежувальні параметри збираного врожаю і/або робочі параметри робочої машини швидко та зрозуміло для оператора, у переважному дальшому розвитку винаходу параметр збираного врожаю і/або робочий параметр робочої машини, який актуально обмежує регулювання швидкості руху за допомогою регулятора руху, показується у керуючо-, обслуговуючо-індикаторному блоці як піктограма. Під повідомленням тут слід розуміти, наприклад, зображення на розташованому на робочій машині дисплеї і/або активізацію відповідних попереджувальних світлових сигналів, причому як дисплей, так і попереджувальні світлові сигнали є елементами керуючо-, обслуговуючо-індикаторного блока. Щоб доступно повідомити різні обмежувальні параметри збираного врожаю і/або робочі параметри робочої машини швидко та просто для оператора, у переважному наступному розвитку винаходу параметр збираного врожаю і/або робочий параметр робочої машини, який актуально обмежує регулювання швидкості руху за допомогою регулятора руху, показується у 1 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 60 керуючо-, обслуговуючо-індикаторному блоці як позначення. Під повідомленням тут слід розуміти, наприклад, зображення на розташованому на робочій машині дисплеї і/або активізацію відповідних попереджувальних світлових сигналів, причому як дисплей, так і попереджувальні світлові сигнали є елементами керуючо-, обслуговуючо-індикаторного блока. Далі само собою зрозумілим є припустити, що оператору у керуючо-, обслуговуючоіндикаторному блоці показується параметр збираного врожаю і/або робочий параметр робочої машини, що актуально обмежує регулювання швидкості руху за допомогою регулятора руху, як піктограма і як позначення, так що оператор може дуже просто цілеспрямовано прочитати інформацію. Альтернативно він може за допомогою відповідного настроювання вибрати в керуючо-, обслуговуючо-індикаторному блоці, у якій формі він хоче візуально отримати інформацію. У переважній формі винаходу індикація параметра збираного врожаю і/або робочого параметра робочої машини, який обмежує регулювання швидкості руху за допомогою регулятора руху, відбувається в окремому вікні монітора керуючо-, обслуговуючо-індикаторного блока, так що спрощується зчитування інформації для оператора робочої машини. Особливо швидко та зрозуміло оператор сприймає інформацію тоді, коли окреме вікно монітора перекриває інші вікна монітора керуючо-, обслуговуючо-індикаторного блока щонайменше періодично у часі і/або обмеженим діапазоном, так щоб актуально важлива для оператора інформація ставилася на передній план. Переважно для щонайменше одного параметра збираного врожаю і/або одного робочого параметра робочої машини кожного разу може призначатися як мінімум одне нижнє регульоване граничне значення або одне верхнє регульоване граничне значення чи нижнє та верхнє регульовані граничні значення, так що регулювання швидкості руху за допомогою регулятора руху здійснюється у чітко визначених межах, які можуть залежати як від надійності, так і від стабільності руху робочої машини, а також від зовнішніх загальних умов. У переважній формі винаходу відповідні регульовані граничні значення можуть вводитися і/або змінюватися за допомогою керуючо-, обслуговуючо-індикаторного блока, так що оператор індивідуально може визначати підхожі на його думку регульовані граничні значення. Для того, щоб оператору робочої машини надавалась у розпорядження не тільки інформація про те, який параметр збираного врожаю і/або робочий параметр діє обмежувально, але й він додатково мав можливість зробити висновок, чи оптимально вибрані визначені регульовані граничні значення, йому у переважній наступній розробці винаходу у керуючо-, обслуговуючо-індикаторному блоці кожного разу показується як параметр збираного врожаю і/або робочий параметр робочої машини, що актуально обмежує регулювання швидкості руху за допомогою регулятору руху, так і визначені для відповідного параметра збираного врожаю і/або робочого параметра робочої машини регульовані граничні значення. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху робочим параметром робочої машини є швидкість ходу, яка підтримується такою, щоб під час їзди в режимі збирання врожаю постійно гарантувалася б стабільність руху і тим самим надійність роботи робочої машини. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху робочим параметром робочої машини є завантаження двигуна, яке підтримується таким, щоб він, наприклад, не перевантажувався і/або міг експлуатуватися в діапазоні частоти обертання, в якій забезпечувалося б якомога менше споживання пального. Відповідно до цього визначаються тоді регульовані граничні значення. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху робочим параметром робочої машини є стан одного або кількох робочих агрегатів і/або робочих середовищ, який підтримується таким, щоб, наприклад, привідний двигун не перегрівався, якщо сталося б, що в охолоджувальній установці двигуна було в наявності недостатньо охолоджувальної рідини, або щоб, наприклад, не працював насухо гідронасос, якщо б у системі знаходилося недостатньо масла для гідравліки, або щоб, наприклад, недостатньо змащувався привідний двигун, якщо б температура масла у двигуні перебувала у критичних межах. Зазначені тут приклади стосуються багатьох станів одного або кількох робочих агрегатів і/або робочих середовищ, які можуть обмежувати регулювання швидкості руху за допомогою регулятора руху. Під робочими середовищами слід розуміти необхідні для функціонування робочих агрегатів газові суміші і/або рідини, такі, наприклад, як стисне повітря, масло для гідравлічних систем, мастило і/або охолоджувальна рідина. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху робочим параметром робочої машини є продуктивність пристрою очищення збираної сільськогосподарської продукції робочої машини, яка підтримується такою, що, 2 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 60 наприклад, як тільки датчики реєстрації втрат зерна при очистці зафіксують, що ці втрати зростають до небажаної межі, регулювання швидкості руху за допомогою регулятора руху обмежується таким чином, що швидкість руху більше не підвищується, щоб обмежити масу перероблюваної продукції, яка завантажує решета очищувального пристрою. Збільшення втрат при очистці стосується тут, наприклад, великої кількості параметрів, обмежуючих продуктивність пристрою очищення збираного врожаю. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху робочим параметром робочої машини є продуктивність пристрою сепарування збираного врожаю робочої машини, яка підтримується такою, що, наприклад, як тільки датчики реєстрації втрат зерна при сепарації зафіксують, що ці втрати зростають до небажаної межі, регулювання швидкості руху за допомогою регулятора руху обмежується таким чином, що швидкість руху більше не підвищується, щоб обмежити масу перероблюваної продукції, яка завантажує сепараторний пристрій. Збільшення втрат при сепарації стосується тут, наприклад, великої кількості параметрів, обмежуючих продуктивність пристрою сепарування збираного врожаю. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху робочим параметром робочої машини є процес перевантаження збираного врожаю на зовнішній віддалений транспортний засіб. Для того, аби не допустити втрат зерна у процесі перевантаження збираного врожаю на зовнішній віддалений транспортний засіб, важливо, щоб робоча машина і транспортний засіб мали приблизно однакову швидкість руху, яка б дозволяла спрямовано перевантажувати зібраний врожай. Через те, що швидкість руху таким чином обмежується під час перевантаження, регулятор руху також не може здійснювати регулювання швидкості руху, наприклад, залежно від стану рослинності збираної сільськогосподарської культури, так що регулювання таким чином обмежується процесом перевантаження. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху робочим параметром робочої машини є реєстрована електронною системою робочої машини відстань до кінця або початку рядка та, відповідно, поля, так що при реєстрованій робочою машиною малій відстані до кінця або початку рядка та, відповідно, поля регулювання швидкості руху за допомогою регулятора руху обмежується таким чином, що, наприклад, перед заїздом на поле або відповідно на рядок швидкість руху за допомогою регулятора руху підтримується зазвичай невисокою,так що як тільки розпочинається поле або рядок, робоча машина повинна сильно пригальмувати. У подальшому, наприклад, наближено до кінця поля або рядка, швидкість руху не уповільнюється навіть при незначному збільшенні маси збираної сільськогосподарської продукції, через те, що це наприкінці поля або рядка могло б привести до сильного розгону робочого транспортного засобу. Таким чином реєстрована електронною системою відстань обмежує регулювання швидкості руху за допомогою регулятора руху. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху параметром збираного врожаю є пропускна кількість збираного врожаю, що подається робочим органам робочої машини, так, що, наприклад, при досягненні визначеної максимальної кількості збираного врожаю регулятор руху більше не підвищує швидкість руху робочої машини, хоча, наприклад, у потужності двигуна ще й були б наявні резерви. Таким чином пропускна кількість збираного врожаю обмежує регулювання швидкості руху. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху параметром збираного врожаю є складова частина зернового матеріалу у масі збираної продукції, що знаходиться у пристрої переробки сходу з решіт робочої машини, так, що, наприклад, при збільшенні складової частини зернового матеріалу у пристрої переробки сходу від визначеного регульованого граничного значення швидкість руху більше не підвищується за допомогою регулятора руху, з тим, щоб складова частина зернового матеріалу не збільшувалася далі у пристрої переробки сходу. У переважній формі винаходу обмежуючим регулювання швидкості руху за допомогою регулятора руху параметром збираного врожаю є обсяг маси збираного врожаю, що знаходиться у пристрої переробки сходу з решіт робочої машини, так що, наприклад, при зростанні обсягу маси збираного врожаю у пристрої переробки сходу від визначеного регульованого граничного значення швидкість руху більше не підвищується за допомогою регулятора руху, з тим, щоб обсяг маси збираного врожаю не збільшувався далі у пристрої переробки сходу. У переважній формі винаходу регулювання швидкості руху за допомогою регулятора руху здійснюється автоматично завжди по регульованому граничному значенню, обумовленому 3 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 обмежувально діючим параметром збираного врожаю і/або робочим параметром робочої машини. Це означає, що регулятор руху, всупереч обмеженню на підставі параметра збираного врожаю і/або робочого параметра, самостійно тривало намагається підігнати швидкість руху робочої машини до визначеного регулятора руху заданої швидкості руху. При цьому регулятор руху таким чином регулює швидкість руху постійно "вздовж" регульованого граничного значення, яке виявляється обмеженням. Якщо, наприклад, обмежувально діючим робочим параметром є завантаження решіт очищувального пристрою, то регулятор руху намагається, як тільки обмежувально діюче завантаження решіт навіть лише незначно зменшиться, знов підвищити швидкість руху. Таким чином швидкість руху випливає завжди з існуючого на поточний момент завантаження решіт очищувального пристрою. Зазначений тут приклад стосується безлічі регульованих меж, які враховує регулятор руху як регулювальну величину для регулювання швидкості руху. У переважній формі винаходу самохідна сільськогосподарська робоча машина виконана як зернозбиральний комбайн. У подальшому винахід більш докладно пояснюється за допомогою креслень, що додаються, де показано: Фіг. 1 - вигляд збоку робочої машини, виконаної як зернозбиральний комбайн; Фіг. 2 - зображення на дисплеї індикаторного блока у першій формі виконання; і Фіг. 3 - зображення на дисплеї індикаторного блока у другій формі виконання. Зображена на Фіг. 1 самохідна сільськогосподарська робоча машина 2, виконана як зернозбиральний комбайн 1, має приєднаний з фронтальної сторони навісний агрегат 8, виконаний як жниварка 7, який скошує злакову культуру 9, що росте на полі, і далі подає її на похилий транспортер 10. Похилий транспортер 10 передає масу збираної продукції 9 на наступний молотильний механізм 11, який проводить первинну обробку збираного врожаю 9, причому останній розділяється на суміш зерна та полови 12 і потік матеріалу 13, що складається з вимолочених стебел. Суміш зерна та полови 12 переміщується до очищувального пристрою 14, який відокремлює зерна від незернових складових частин, тобто від часток соломин та полови. Потік матеріалу 13, що складається з вимолочених стебел, потрапляє на сепараторний пристрій, виконаний як клавішний соломотряс 15, який транспортує потік матеріалу 13 у задню ділянку комбайна 1 і при цьому осаджує зерна, дрібні соломинки та полову, що знаходяться у потоці матеріалу 13, які потім теж направляються до очищувального пристрою 14. Не виходить за рамки винаходу те, що сепараторний пристрій може бути виконаний також як аксіальний ротор. Так само не виходить за рамки винаходу, що молотильний механізм і сепараторний пристрій можуть бути виконані з'єднаними один з одним як аксіальний ротор. Похилий транспортер 10 підйомними циліндрами 16, які корпусною стороною приєднані з можливістю поворотного руху до зернозбирального комбайна 1, а з боку поршневого штока поворотно рухомо з'єднані з похилим транспортером 10, поворотно пересувається навколо поворотної осі 17, розташованої поперечно до напрямку руху FR. Зернозбиральний комбайн 1 має двигун внутрішнього згоряння 18, який приводить в дію привід ходової частини 19 для приведення в рух передніх коліс 20 комбайна 1, привід молотарки для приведення в дію молотильного механізму 11 і привід жниварки для приведення в дію косильного механізму 7. Привід ходової частини 19 обладнаний регулятором швидкості, який приймає керуючі сигнали від регулятора руху 21, що безперервно автоматично регулює швидкість руху зернозбирального комбайна 1. Регулятор руху 21 має керуючо-регулювальний блок 22, який перебуває у зв'язку з різними датчиками 23, 25, 26, 29, 30, 34, 37, 39, 50, розташованими на зернозбиральному комбайні 1 та на жниварці 7. На передньому кінці жниварки 7 розташований датчик 50 контролю рослин, який у напрямку руху FR розпізнає рослинність, що знаходиться на полі перед зернозбиральним комбайном 1. Датчик 50 контролю рослин в залежності від рослинності поля виробляє сигнали BS про характер рослин. Інший датчик 25 здійснює контроль за вмикачем/вимикачем молотильного механізму 11 і в залежності від експлуатаційного стану молотильного механізму 11 виробляє сигнал DS про функціонування молотарки. Наступний датчик 23 здійснює контроль за вмикачем/вимикачем 24 жниварки 7 і в залежності від експлуатаційного стану жниварки виробляє сигнал SWS про функціонування жниварки 7. Датчик 26 кута повороту розташований на поворотній осі 17 похилого транспортера 10 і реєструє відомим самим по собі способом кут повертання 27 між похилим транспортером 10 і зернозбиральним комбайном 1. Датчик 26 кута повороту при певному куті повертання 27, при якому жниварка 7 займає робоче положення 28, виробляє сигнал AS про робочу положення. 4 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 60 На приводі ходової частини 19 розташований датчик 29 частоти обертання, який відомим самим по собі способом реєструє швидкість руху та напрямок руху FR зернозбирального комбайна 1. Датчик 29 частоти обертання пропорційно до швидкості руху при їзді вперед зернозбирального комбайна 1 виробляє сигнал VS про швидкість руху. Датчик 30 пропускної здатності відомим самим по собі способом розташований на приводі молотарки і реєструє обертовий момент молотильного барабана, який є залежним від кількості маси збираного врожаю, що пропускається через молотильний механізм 11. Датчик 30 пропускної здатності пропорційно до проходження через молотильний механізм 7 маси збираного врожаю виробляє сигнал DSS про пропускну кількість. Похилий транспортер 10 має відомий сам по собі пристрій 32 реєстрації товщини шару, який реєструє товщину шару маси збираної продукції у похилому транспортері 10. Пристрій 32 реєстрації товщини шару має датчик 34, що виробляє сигнал SHS про товщину шару, який є пропорційним до товщини шару. У кінці клавішного соломотряса 15 розташований пристрій 35 виміру потоку зернового матеріалу, який контролює втрати зерна при сепарації у потоці вимолоченого стеблового матеріалу 13. Пристрій 35 виміру потоку зернового матеріалу має декілька вібродатчиків 37, які відомим самим по собі способом виробляють сигнали KVS про втрати зерна, що є пропорційними до втрат при сепарації. Зернозбиральний комбайн додатково обладнаний навігаційним пристроєм 38, який відслідковує місцеположення зернозбирального комбайна 1. Навігаційний пристрій 38 має датчики 39, які виробляють сигнал PS координат, який є залежним від місцеположення зернозбирального комбайна 1. Керуючо-регулювальний пристрій 22 порівнює створювані датчиками 34 сигнали SHS про товщину шару з попередньо заданою мінімальною товщиною шару. Якщо товщина шару, що визначається, є однакової величини або більше, ніж мінімальна товщина шару, керуючорегулювальнийблок 22 виробляє сигнал про запуск робочого процесу, який передається до регулятора руху 21. При отриманні сигналу про запуск робочого процесу регулятор руху 21 розпізнає, що зернозбиральний комбайн 1 перебуває у запущеному режимі роботи. Якщо ж регулятор руху 21 не отримує сигнал про запуск робочого процесу, вона розпізнає, що зернозбиральний комбайн перебуває у холостому режимі функціонування. Щоб підвищити якість розпізнавання, допустимим є виконання винаходу, у якому регулятор руху 21 розпізнає, наприклад, запущений робочий режим та холостий режим функціонування тільки тоді, коли на регулятор руху 21 передаються інші сигнали про запуск робочого процесу. Керуючо-регулювальний блок 22 порівнює створений датчиком 25 сигнал DS про функціонування молотарки з попередньо заданим значенням вмикання і тим самим виясняє експлуатаційний стан молотильного механізму 11. Якщо молотильний механізм 11 увімкнений, то керуючо-регулювальний блок 22 виробляє перший сигнал про запуск робочого процесу. Так само допустимим є те, що керуючо-регулювальний блок 22 порівнює створений датчиком 23 сигнал SWS про функціонування жниварки із значенням вмикання для жниварки 7 і тим самим виясняє про експлуатаційний стан жниварки 7. Якщо жниварка 7 увімкнена, то керуючо-регулювальний блок 22 виробляє другий сигнал про запуск робочого процесу. Можливим є також те, що керуючо-регулювальний блок 22 порівнює створений датчиком 26 кута повороту сигнал AS про робоче положення з попередньо заданим значенням робочого положення і цим обчислює робоче положення 28 жниварки 7. Якщо жниварка 7 перебуває у робочому положенні 28, то керуючо-регулювальний блок 22 виробляє третій сигнал про запуск робочого процесу. Далі можливим є те, що керуючо-регулювальний пристрій 22 порівнює створені датчиком 29 частоти обертання сигнали VS про швидкість руху із заданим значенням швидкості руху і визначає, чи рухається зернозбиральний комбайн 1 з мінімальною швидкістю ходу. Якщо швидкість руху зернозбирального комбайна 1 є однакової величини або більше, ніж мінімальна швидкість ходу, то керуючо-регулювальний блок 22 виробляє четвертий сигнал про запуск робочого процесу. У наступному прикладі виконання винаходу допустимим є те, що регулятор руху 21 через керуючо-регулювальний блок 22 з'єднаний з датчиком 50 контролю рослин на полі, і регулятор руху 21 в залежності від вироблюваних датчиком 50 контролю рослин сигналів BS про характер рослинності на полі визначає, рухається зернозбиральний комбайн 1 у зоні рослинності чи поза зоною рослинності, тобто, перебуває зернозбиральний комбайн 1 у холостому режимі функціонування чи у запущеному робочому режимі. Так само можливим є те, що регулятор руху 21 з'єднаний з навігаційним пристроєм 38, і регулятор руху 21 в залежності від вже пройденого маршруту, а також від ширини захвату жниварки 7 та карти ділянки поля визначає, перебуває зернозбиральний комбайн у холостому 5 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 60 режимі функціонування чи у запущеному робочому режимі. Якщо регулятор руху 21 визначає, що зернозбиральний комбайн 1 перебуває у запущеному робочому режимі, то регулятор руху 21 регулює швидкість руху в залежності від параметра збираного врожаю, такого, наприклад, як втрати зерна у сепараційному процесі, що встановлюються пристроєм 35 виміру потоку зернового матеріалу, і/або робочого параметра зернозбирального комбайна 1, такого, наприклад, як товщина шару збираної продукції у похилому транспортері 10. Через керуючо-, обслуговуючо-індикаторний блок 22, 47, з'єднаний з регулятором руху 21, водій задає граничне значення 48 втрат зерна, яким регулятор руху 21 вираховує потрібну товщину шару маси збираної продукції для похилого транспортера 10, регулятор руху 21 регулює швидкість руху так, що товщина шару маси збираного врожаю досягає розрахованої заданої товщини шару 49. Регулятор руху 21 порівнює втрату зерна у сепараторі з граничним значенням втрати зерна 48. Якщо втрата зерна у сепараторі через певний проміжок часу буде більшою, ніж граничне значення втрати зерна 48, швидкість руху зменшується, поки втрата зерна у сепараторі не відповідатиме граничному значенню втрати зерна 48 і разом з тим не буде встановлена нова задана товщина шару 49. Якщо втрата зерна у сепараторі через заданий проміжок часу буде меншою, ніж граничне значення втрати зерна 48, швидкість руху підвищується доти, поки втрата зерна у сепараторі не відповідатиме граничному значенню втрати зерна 48. Регулятор руху 21 безперервно поновлює товщину шару маси збираної сільськогосподарської продукції шляхом зміни швидкості руху машини протягом робочого використання, щоб налаштовуватися на різні умови збирання врожаю. Через те, що описана автоматична система регулювання швидкості руху за допомогою регулятора руху 21 для керування пропускною здатністю зернозбирального комбайна 1 обмежується однак різними параметрами збираного врожаю і/або робочими параметрами, оператору у з'єднаному з керуючо-регулювальним блоком 22 індикаторному блоці 47 показуються обмежувально діючий елемент або обмежувально діюча настройка, або обмежувально діючий параметр збираного врожаю, так що оператор за допомогою керуючо-, регулювально-індикаторного блока 22, 47 може виконувати відповідні зміни у настройках зернозбирального комбайна 1. Фігура 2 показує як зразок зображення дисплея 46 індикаторного блока 47 у випадку здійсненого обмеження автоматичної системи регулювання швидкості руху за допомогою регулятора руху на підставі робочого параметра зернозбирального комбайна 1. Базове індикаторне поле 45 поділене на декілька діапазонів 42, 43, 44, які показують оператору найважливіші дані не тільки під час експлуатації комбайна в робочому режимі, але й на холостому ходу. Ця передача даних може здійснюватися як за допомогою графічних індикаторних елементів, так і за допомогою представлених у числовому вираженні значень 40. У верхньому діапазоні дисплея 46 показані різні функціональні вікна 36 з закладеними на зберігання у пам'ять комп'ютера параметрами машини і/або збираного врожаю, які повинні з'являтися на базовому індикаторному полі 45 не одночасно, а вони можуть бути викликаними через меню та субменю, у яких раціонально можуть бути зведені підсумовані робочі параметри і/або параметри збираного врожаю. Завантаження окремих функціональних вікон 36 з робочими параметрами і/або параметрами збираного врожаю вільно вибирається оператором. Показані у прикладі виконання функціональні вікна 36 можуть настроюватися шляхом запиту і показують специфічні для робочого процесу робочі параметри і/або параметри збираного врожаю, перебуваючого у робочому режимі зернозбирального комбайна 1. У випадку, якщо регулювання швидкості руху за допомогою регулятора руху тепер обмежується на підставі параметрів збираного врожаю і/або робочих параметрів, оператору або автоматично, або шляхом відповідного вибору показується додаткове вікно монітора 33, яке періодично у часі та обмеженим діапазоном перекриває базове індикаторне поле 45. У вікні монітора 33 оператору представляється визначене ним регульоване граничне значення для максимальної швидкості руху комбайна у робочому режимі як задана величина 31, виражена як у числовій формі, так і як стрілка на відповідному місці смуги 6, що зображує фактичну величину. Додатково з кожної кінцевої сторони смуги 6 йому показується можливе мінімально, а також можливе максимально встановлюване регульоване граничне значення 4, як і актуальний для кожного з них режим руху 5, згідно з яким приводиться в дію регулятору руху. Зображене тут позначення "km/h" стосується режиму руху 5 "величина швидкості руху", при якому швидкість руху регулюється за допомогою регулятора руху залежно від швидкості. Альтернативно позначення для режиму руху 5 може зображуватися також як піктограма. Внаслідок того, що у прикладі виконання у смузі 6 фактична швидкість зображена меншою, ніж задана величина 31 швидкості руху, оператор отримує інформацію про те, що автоматичне регулювання швидкості руху обмежується за допомогою регулятора руху. Щоб додатково надати йому інформацію про те, який параметр 6 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 60 збираного врожаю і/або робочий параметр зернозбирального комбайна діє обмежувально, додаткове вікно монітора 33 містить відповідну піктограму 3. Альтернативно або додатково є допустимим, якщо індикація піктограми 3 відбувається у будь-якому іншому діапазоні дисплея 46. У прикладі виконання оператору показується піктограма 3 для обмеження регулювання швидкості руху на підставі робочого параметра "захист двигуна". Термін "захист двигуна" означає, наприклад, що на підставі різних типових умов використовувана для охолодження двигуна внутрішнього згоряння 18 охолоджувальна рідина має високу температуру, що могло б ставити під загрозу ефективне охолодження двигуна внутрішнього згоряння 18. Тепер, щоб захистити двигун внутрішнього згоряння 18 від перегріву, швидкість руху дроселюється для зменшення навантаження на двигун внутрішнього згоряння 18, а, отже, і на його охолоджувальну систему, поки охолоджувальна рідина знов не матиме температуру, яка забезпечуватиме ефективне охолодження двигуна внутрішнього згоряння 18. Наведений тут приклад стосується безлічі можливих умов роботи, які можуть спричинювати робочий параметр "захист двигуна" та пов'язане з ним обмеження регулювання швидкості руху за допомогою регулятора руху. Оскільки оператор тепер на підставі піктограми 3 знає, що робочий параметр "захист двигуна" обмежує регулювання швидкості руху, він може цілеспрямовано протидіяти цьому обмеженню без необхідності підгонки настройок інших параметрів збираного врожаю і/або робочих параметрів. Обмеженню на підставі робочого параметра "захист двигуна" оператор може протидіяти тим, що він, наприклад, підвищує частоту обертання вентилятора охолодження двигуна охолоджувальної системи і/або при надто низькому стані охолоджувальної рідини збільшує витрату охолоджувальної рідини, щоб забезпечити ефективне охолодження двигуна внутрішнього згоряння. Завдяки цілеспрямованому втручанню оператора обмежувально діючий робочий параметр налаштовується так, що він не обмежує більше автоматичне регулювання швидкості руху за допомогою регулятора руху 21. Під "захистом двигуна" далі слід розуміти, наприклад, що двигун внутрішнього згоряння 18 захищається від того, щоб зупинитися на підставі надто великого пригнічення двигуна. Під пригніченням двигуна слід розуміти те, що частота обертання двигуна внутрішнього згоряння 18 на підставі високого навантаження спадає. Якщо за цих умов, наприклад, пригнічення двигуна на підставі навантаження зернозбирального комбайна 1 є таким великим, що існує небезпека, що двигун внутрішнього згоряння 18 може зупинитися, то регулятор руху 21 обмежується у цьому відношенні тим, що швидкість руху зменшується. У такому випадку оператору тоді також показується піктограма 3 для обмежувального робочого параметра "захист двигуна". Оскільки оператор тепер на підставі піктограми 3 знає, що робочий параметр "захист двигуна" обмежує регулювання швидкості руху, він може цілеспрямовано протидіяти цьому обмеженню без необхідності підгонки настройок інших параметрів збираного врожаю і/або робочих параметрів. Описаний у прикладі виконання робочий параметр "захист двигуна" стосується безлічі можливих параметрів збираного врожаю і/або робочих параметрів, які можуть обмежувати автоматичне регулювання швидкості руху за допомогою регулятора руху. Фігура 3 показує як зразок зображення показаного на Фігурі 2 додаткового вікна монітора 33 у двох формах виконання винаходу. У вікні монітора 33 оператору показується визначене ним регульоване граничне значення для максимальної товщини шару збираного врожаю у похилому транспортері зернозбирального комбайна як задана величина 31, виражена як у числовій формі, так і як стрілка на відповідному місці смуги 6, що зображує фактичну величину. Додатково на кожній із кінцевих сторін смуги 6 йому показується можливе мінімально, а також можливе максимально визначуване регульоване граничне значення 4, як і актуальний для кожного з них режим руху 5, згідно з яким приводиться в дію регулятор руху. Зображене тут позначення "С-Р" стосується режиму руху 5 "пропускна здатність", при якому швидкість руху керується за допомогою регулятора руху залежно від пропускної кількості маси збираного врожаю. Пропускна здатність збираного врожаю визначається товщиною шару маси збираного врожаю у похилому транспортері. Внаслідок того, що у прикладі виконання у смузі 6 фактична товщина шару зображена меншою, ніж задане значення 31 товщини шару, оператор отримує інформацію про те, що автоматичне регулювання швидкості руху обмежується за допомогою регулятора руху, оскільки у противному разі регулятор руху підвищувала б швидкість руху доти, поки фактична висота шару не відповідала б визначеній як задане значення 31 висоті шару. Для того, щоб оператору додатково надати інформацію про те, який параметр збираного врожаю і/або робочий параметр зернозбирального комбайна діє обмежувально, додаткове вікно монітора 33 містить відповідну піктограму 3. У прикладі виконання оператору показана піктограма 3 для обмеження регулювання швидкості руху на підставі робочого параметра "решітні втрати". Термін "решітні втрати" означає, наприклад, що досягнуто визначеного оператором регульованого граничного значення для решітних втрат, тобто зерен збираної 7 UA 99255 C2 5 10 15 20 25 30 35 40 45 50 55 60 рослинної продукції, які невикористаними покидають зерноочищувальний пристрій комбайна, випадаючи на ґрунт поля. Оскільки регульоване граничне значення досягнуте ще при малій пропускній кількості маси збираного врожаю, тобто незначній товщині шару збираної продукції у похилому транспортері, регулятора руху обмежується у цьому відношенні тим, що вона не підвищує ще більше швидкість руху, що могло б привести до подальшого підвищення кількості маси збираного врожаю, що пропускається через робочі механізми, а отже наступного збільшення товщини шару у похилому транспортері, що неминуче підвищило б ще більше решітні втрати. Оскільки оператор тепер на підставі піктограми 3 знає, що робочий параметр "решітні втрати" обмежує регулювання швидкості руху, він може цілеспрямовано протидіяти цьому обмеженню без необхідності підгонки настройок інших параметрів збираного врожаю і/або робочого параметра. Обмеженню на підставі робочого параметра "решітні втрати" оператор може протидіяти тим, що він, наприклад, скорочує частоту обертання очищувального вентилятора і/або збільшує ширину у світлі отворів жалюзі очищувальних решіт, і/або підстроює регульоване граничне значення для решітних втрат. Завдяки цілеспрямованому втручанню водія обмежувально діючий робочий параметр настроюється так, що він більше не обмежує автоматичне регулювання швидкості руху за допомогою регулятора руху. Описаний у прикладі виконання робочий параметр "решітні втрати" стосується безлічі можливих параметрів збираного врожаю і/або робочих параметрів, які можуть обмежувати автоматичне регулювання швидкості руху за допомогою регулятора руху. Перелік посилальних позначень: 1. Зернозбиральний комбайн 2. Робоча машина 3. Піктограма 4. Регульоване граничне значення 5. Режим руху 6. Смуга 7. Жниварка 8. Навісний агрегат 9. Збирана сільськогосподарська продукція 10. Похилий транспортер 11. Молотильний механізм 12. Суміш зерна та полови 13. Потік вимолоченого стеблового матеріалу 14. Очищувальний пристрій 15. Клавішний соломотряс 16. Підйомний циліндр 17. Поворотна вісь 18. Двигун внутрішнього згоряння 19. Привід ходової частини 20. Передні колеса 21. Регулятор руху 22. Керуючо-регулювальний блок 23. Датчик 24. Вмикач/вимикач 25. Датчик 26. Датчик кута повороту 27. Кут повертання 28. Робоче положення 29. Датчик частоти обертання 30. Датчик пропускної здатності 31. Задане значення 32. Пристрій реєстрації товщини шару маси продукції 33. Вікно монітора 34. Датчик 35. Пристрій виміру потоку зернового матеріалу 36. Функціональне вікно 37. Вібродатчик 38. Навігаційний пристрій 39. Датчик 40. Числове значення 8 UA 99255 C2 5 10 15 20 41. Індикаторний елемент 42. Діапазон 43. Діапазон 44. Діапазон 45. Базове індикаторне поле 46. Дисплей 47. Індикаторний блок 48. Граничне значення втрати зерна 49. Задана товщина шару маси збираної продукції 50. Датчик контролю рослин на полі FR Напрямок руху BS Сигнал про характер рослин DS Сигнал про функціонування молотарки SWS Сигнал про функціонування жниварки AS Сигнал про робоче положення VS Сигнал про швидкість руху DSS Сигнал про пропускну кількість маси продукції SHS Сигнал про товщину шару маси продукції KVS Сигнал про втрату зерна PS Сигнал координат. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 60 1. Самохідна сільськогосподарська робоча машина (2), яка містить робочі органи з регульованими робочими параметрами, і яка пересувається зі швидкістю ходу, причому швидкість ходу автоматично регулюється в залежності від щонайменше одного параметра збираного врожаю і/або одного робочого параметра робочої машини (2) за допомогою регулятора руху (21), та з, як мінімум, одним керуючо-, обслуговуючо-індикаторним блоком (22, 47), за допомогою якого можуть встановлюватися та показуватися параметри збираного врожаю і/або робочі параметри робочої машини (2), яка відрізняється тим, що керуючо-, обслуговуючо-індикаторний блок (22, 47) безпосередньо показує оператору робочої машини параметр збираного врожаю і/або робочий параметр робочої машини (2), який актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21). 2. Самохідна сільськогосподарська робоча машина (2) за п. 1, яка відрізняється тим, що параметр збираного врожаю і/або робочий параметр робочої машини (2), який актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21), показується у керуючо-, обслуговуючо-індикаторному блоці (22, 47) як піктограма (3). 3. Самохідна сільськогосподарська робоча машина (2) за пп. 1 або 2, яка відрізняється тим, що параметр збираного врожаю і/або робочий параметр робочої машини (2), який актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21), показується у керуючо-, обслуговуючо-індикаторному блоці (22, 47) як позначення. 4. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що індикація параметра збираного врожаю і/або робочого параметра робочої машини (2), який обмежує швидкість руху за допомогою регулятора руху (21), відбувається в окремому вікні (33) монітора керуючо-, обслуговуючо-індикаторного блока (22, 47). 5. Самохідна сільськогосподарська робоча машина (2) за п. 4, яка відрізняється тим, що окреме вікно (33) монітора щонайменше періодично у часі і/або обмеженим діапазоном перекриває інші вікна (45) монітора керуючо-, обслуговуючо-індикаторного блока (22, 47). 6. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що для щонайменше одного параметра збираного врожаю і/або робочого параметра робочої машини (2) може бути визначено кожного разу як мінімум одне нижнє регульоване граничне значення або одне верхнє регульоване граничне значення чи нижнє та верхнє регульовані граничні значення. 7. Самохідна сільськогосподарська робоча машина (2) за п. 6, яка відрізняється тим, що відповідні регульовані граничні значення можуть бути задані і/або змінюватися за допомогою керуючо-, обслуговуючо-індикаторного блока (22, 47). 8. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що оператору робочої машини (2) у керуючо-, обслуговуючо-індикаторному блоці (22, 47) показується кожного разу як параметр збираного врожаю і/або робочий параметр 9 UA 99255 C2 5 10 15 20 25 30 35 40 45 робочої машини (2), що актуально обмежує регулювання швидкості руху за допомогою регулятора руху (21), так і визначені для відповідного параметра збираного врожаю і/або робочого параметра робочої машини регульовані граничні значення. 9. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є швидкість ходу. 10. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є завантаження двигуна. 11. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є стан одного або кількох робочих агрегатів і/або робочих середовищ. 12. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є продуктивність пристрою (14) очищення збираного врожаю робочої машини (2). 13. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є продуктивність пристрою сепарації збираного врожаю робочої машини (2). 14. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є процес перевантаження збираного врожаю на зовнішній віддалений транспортний засіб. 15. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочим параметром робочої машини (2), який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є реєстрована електронною системою робочої машини (2) відстань до кінця або початку рядка та, відповідно, поля. 16. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що параметром збираного врожаю, який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є пропускна кількість збираного врожаю, що подається робочим органам робочої машини (2). 17. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що параметром збираного врожаю, який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є складова частка зернового матеріалу у масі збираного врожаю, що знаходиться у пристрої переробки сходу з решіт робочої машини (2). 18. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що параметром збираного врожаю, який обмежує регулювання швидкості руху за допомогою регулятора руху (21), є обсяг маси збираного врожаю, що знаходиться у пристрої переробки сходу з решіт робочої машини (2). 19. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що регулювання швидкості руху за допомогою регулятора руху (21), відбувається автоматично завжди по регульованому граничному значенню, обумовленому обмежувально діючим параметром збираного врожаю і/або робочим параметром робочої машини (2). 20. Самохідна сільськогосподарська робоча машина (2) за будь-яким з попередніх пунктів, яка відрізняється тим, що робочою машиною (2) є зернозбиральний комбайн (1). 10 UA 99255 C2 11 UA 99255 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled farm working machine
Автори англійськоюBusmann Christoph, Wilken Andreas, BAUMGARTEN JOACHIM, Eggenhaus Georg
Назва патенту російськоюСамоходная сельскохозяйственная рабочая машина
Автори російськоюБусманн Кристоф, Вилькен Андреас, Баумгартен Иоахим, Эггенхаус Георг
МПК / Мітки
МПК: A01D 41/00
Мітки: робоча, самохідна, машина, сільськогосподарська
Код посилання
<a href="https://ua.patents.su/14-99255-samokhidna-silskogospodarska-robocha-mashina.html" target="_blank" rel="follow" title="База патентів України">Самохідна сільськогосподарська робоча машина</a>
Сільськогосподарська робоча машина, спосіб розподілу потоку маси, що вивантажується із сільськогосподарської збиральної машини, та сільськогосподарська робоча машина для здійснення способу
Номер патенту: 75575
Опубліковано: 15.05.2006
Автори: Кюн Бодо, Хайд'янн Франц
МПК: A01D 33/10
Мітки: робоча, маси, потоку, вивантажується, машина, машини, сільськогосподарсько, збиральної, здійснення, сільськогосподарська, спосіб, розподілу, способу
Формула / Реферат:
1. Сільськогосподарська робоча машина щонайменше з одним робочим органом для обробки збираної маси і приєднаним до цього робочого органа першим транспортуючим збирану масу пристроєм, а також щонайменше ще з одним додатковим транспортуючим збирану масу пристроєм, причому щонайменше два транспортуючих збирану масу пристрої розташовані таким чином, що утворюють між собою прохідний для збираної маси проміжок і забезпечують протилежні один одному...
Сільськогосподарська робоча машина
Номер патенту: 96135
Опубліковано: 10.10.2011
Автори: Екехард Йеппе, Рейнхард Лайнг
МПК: A01B 63/00, A01D 41/08, G01D 3/00, A01B 69/00, A01D 41/12, G01D 7/00
Мітки: робоча, машина, сільськогосподарська
Формула / Реферат:
1. Сільськогосподарська робоча або збиральна машина з щонайменше одним робочим агрегатом та кабіною водія, у якій на електронному базовому індикаторному полі, зображеному як мінімум в одному індикаторному блоці, візуально відображається множина закладених у різних функціональних віконцях параметрів машини і/або збираного врожаю і при цьому активізація та настройка базового індикаторного поля здійснюється за допомогою пристрою...
Самохідна робоча машина

Номер патенту: 69373
Опубліковано: 15.09.2004
Автор: Дікханс Норберт
МПК: F02D 31/00, A01D 43/00
Мітки: робоча, самохідна, машина
Формула / Реферат:
1. Самохідна робоча машина, що містить привідний двигун, редуктор (2) для ходової передачі і щонайменше одну допоміжну передачу (3, 4, 5) для приведення робочих агрегатів, при цьому потужність привідного двигуна розподіляється на ходову передачу і щонайменше на одну допоміжну передачу (3, 4, 5), вимірювальні пристрої (2А, 3А, 4А, 5А, 20А, 30А) для визначення щонайменше однієї величини, що обмежує потужність, у допоміжних передачах (3, 4, 5)...
Самохідна сільськогосподарська збиральна машина з керованим перенавантажувальним пристроєм
Номер патенту: 95459
Опубліковано: 10.08.2011
Автори: Нінабер Герхард, Бруннерт Андреас, Меєр цу Хелліген Ларс, Дікханс Норберт
МПК: A01D 90/00, G05D 1/02, A01D 43/00, A01D 13/00, A01D 41/127, A01D 87/00
Мітки: сільськогосподарська, самохідна, керованим, збиральна, пристроєм, машина, перенавантажувальним
Формула / Реферат:
1. Самохідна сільськогосподарська збиральна машина (2), оснащена навігаційною системою (6) для збору даних про відносні місцеположення транспортних засобів-учасників (2, 3), системою передачі даних (8) для обміну даними між транспортними засобами (2, 3), перевантажувальним пристроєм (9) для передачі зібраного врожаю на вантажний транспортний засіб (3), причому перевантажувальний пристрій (9) має пересипне пристосування (10), керуючу систему...
Самохідна сільськогосподарська збиральна машина з пристроєм виміру втрат зерна
Номер патенту: 96276
Опубліковано: 25.10.2011
Автори: Цурхаке Крістіан, Бруне Маркус, Баумгартен Йоахім
МПК: A01F 12/44, A01D 41/127, A01F 12/58, A01D 75/18, A01D 41/12
Мітки: машина, виміру, самохідна, пристроєм, збиральна, сільськогосподарська, втрат, зерна
Формула / Реферат:
1. Самохідна збиральна машина (1), зокрема зернозбиральний комбайн (2), з пристроєм виміру втрат зерна (21) для решіт (12, 13) очищувального пристрою (11) з щонайменше одним розташованим на задньому кінці очищувального пристрою (11) сенсорним датчиком (22), яка відрізняється тим, що сенсорний датчик (22) розташований в кінці очищувального пристрою (11) позаду щонайменше одного решета (12, 13) таким чином, що складові частини збираної...
Попередній патент: Застосування пептидної сполуки тпо для лікування анемії
Наступний патент: Пристрій та спосіб обробки даних
Випадковий патент: Частково насичені трициклічні сполуки та способи їх отримання і застосування