Спосіб і пристрій автоматичного керування аеротенками
Номер патенту: 102316
Опубліковано: 25.06.2013
Автори: Мешенгіссер Юрій Михайлович, Смирнов Олександр Володимирович, Верютін Сергій Вячеславович, Колеснік Юрій Васильович

Формула / Реферат
1. Спосіб автоматичного керування аеротенками, що включає подачу в паралельно працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок, який відрізняється тим, що стічні води подають в аеротенки через датчики виміру ступеня забруднення припливу стічних вод, розділяють витрату стічних вод в аеротенки на дві групи, де в одній з двох груп аеротенків підтримують постійне навантаження по забруднюючим стічні води речовинам, причому автоматичне керування аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, причому необхідні кількості зворотного мулу і повітря подають в аеротенки по встановленій у логічному блоці розрахунковій моделі з урахуванням ступеня забруднення припливу стічних вод.
2. Пристрій автоматичного керування аеротенками, що містить датчик витрати стічних вод, виконавчі механізми з регуляторами подачі стічних вод в аеротенки, датчики кількості розчиненого кисню, повітродувки, виконавчі механізми з регуляторами подачі зворотного мулу в аеротенки, логічний блок, входи якого зв'язані з датчиком витрати стічних вод і датчиками кількості розчиненого кисню, а виходи логічного блока зв'язані з повітродувками і виконавчими механізмами регуляторів подачі зворотного мулу в аеротенки, який відрізняється тим, що містить датчики кількості зворотного мулу, датчики виміру ступеня забруднення витрати стічних вод, виходи яких зв'язані з відповідними входами логічного блока, що виконаний програмувальним із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод.
Текст
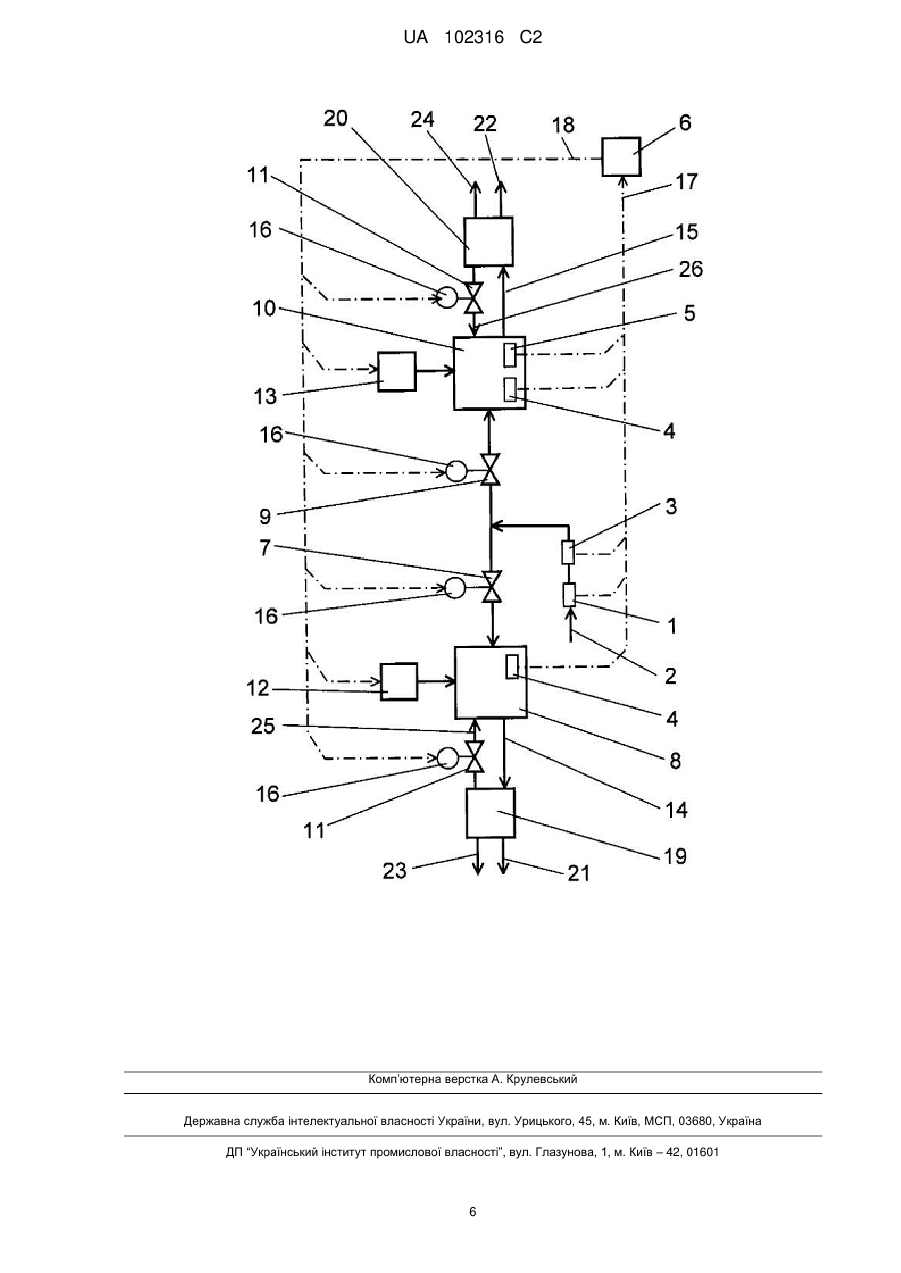
Реферат: Спосіб і пристрій автоматичного керування аеротенками належить до керування аеротенками очисних споруджень і можуть знайти використання в галузі очищення каналізаційних побутових і промислових стічних вод. У пропонованому способі стічні води подають в аеротенки через датчики виміру ступеня забруднення припливу стічних вод, розділяють витрату стічних вод в аеротенки на дві групи, де в одній із двох груп аеротенків підтримують постійне навантаження по забруднюючим стічні води речовинам, причому автоматичне керування аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, причому необхідні кількості зворотного мулу і повітря подають в аеротенки по встановленій у логічному блоці розрахунковій моделі з урахуванням ступеня забруднення припливу стічних вод. Пропонований пристрій містить датчики кількості зворотного мулу, датчики виміру ступеня забруднення витрати стічних вод, виходи яких зв'язані з відповідними входами логічного блока, що виконаний програмувальним із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод. Досягається підвищення ефективності аеробного біологічного очищення стічних вод, поліпшення якості очищених стічних вод, підвищення надійності процесу роботи очисних споруджень при аеробному біологічному очищенні стічних вод. UA 102316 C2 (12) UA 102316 C2 UA 102316 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до керування аеротенками очисних споруджень і може знайти використання в галузі очищення каналізаційних побутових і промислових стічних вод. Відомий спосіб автоматичного керування аеротенками, що включає подачу в паралельно працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок (див. опис винаходу до патенту № 2057723 Російської Федерації, C02F 3/02, опубл. 10.04.1996). Відомий пристрій автоматичного керування аеротенками, що містить датчик витрати стічних вод, виконавчі механізми з регуляторами подачі стічних вод в аеротенки, датчики кількості розчиненого кисню, повітродувки, виконавчі механізми з регуляторами подачі зворотного мулу в аеротенки, логічний блок, входи якого зв'язані з датчиком витрати стічних вод і датчиками кількості розчиненого кисню, а виходи логічного блока зв'язані з повітродувками і виконавчими механізмами регуляторів подачі зворотного мулу в аеротенки (див. опис винаходу до авторського посвідчення № 724453, С02С 1/02, опубл. 30.03.80. Бюл. № 12). Недоліком відомого способу і пристрою є те, що вони не враховують добові і годинні коливання концентрацій забруднюючих речовин у вихідній стічній воді, а, отже, навантаження по забруднюючих речовинах стічних вод, що надходять на очисні спорудження, через що не може бути гарантована постійна ефективність процесу біологічного очищення через порушення режимів харчування складних біоценозів активного мулу аеротенків. Порушення режимів харчування приводить до зниження ефективності очищення стічних вод від забруднюючих речовин на виході з вторинних відстійників. Крім того, показання датчика кількості розчиненого кисню є непрямими технологічними показниками, без зв'язку з якістю аеробного біологічного очищення. Задача винаходу: підвищення ефективності аеробного біологічного очищення стічних вод, поліпшення якості очищених стічних вод, підвищення надійності процесу роботи очисних споруджень при аеробному біологічному очищенні стічних вод. Зазначена задача досягається тим, що спосіб автоматичного керування аеротенками, що включає подачу в паралельно працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок, який відрізняється тим, що стічні води подають в аеротенки через датчики виміру ступеня забруднення припливу стічних вод, розділяють витрату стічних вод в аеротенки на дві групи, де в одній з двох груп аеротенків підтримують постійне навантаження по забруднюючим стічні води речовинам, причому автоматичне керування аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, причому необхідні кількості зворотного мулу і повітря подають в аеротенки по встановленій у логічному блоці розрахунковій моделі з урахуванням ступеня забруднення припливу стічних вод. Зазначена задача досягається також тим, що пристрій автоматичного керування аеротенками, що містить датчик витрати стічних вод, виконавчі механізми з регуляторами подачі стічних вод в аеротенки, датчики кількості розчиненого кисню, повітродувки, виконавчі механізми з регуляторами подачі зворотного мулу в аеротенки, логічний блок, входи якого зв'язані з датчиком витрати стічних вод і датчиками кількості розчиненого кисню, а виходи логічного блока зв'язані з повітродувками і виконавчими механізмами регуляторів подачі зворотного мулу в аеротенки, який відрізняється тим, що містить датчики кількості зворотного мулу, датчики виміру ступеня забруднення витрати стічних вод, виходи яких зв'язані з відповідними входами логічного блока, що виконаний програмувальним із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод. В одній із двох груп аеротенків, наприклад, у першій групі аеротенків автоматично підтримують стаціонарний процес очищення більшої частини витрати припливу стічних вод з постійним годинним навантаженням по забруднюючим стічні води речовинам, що дозволяє подавати постійну витрату повітря від повітродувок і постійну дозу мулу в першу групу аеротенків, що сприятливо впливає на процес біологічного очищення через стабілізацію режимів харчування складних біоценозів активного мулу в першій групі аеротенків. Перерозподіл витрати стічних вод між групами аеротенків здійснюється автоматично за допомогою регуляторів витрати стічних вод по команді від програмувального логічного блока у функції від результатів виміру датчиком витрати стічних вод і групою датчиків виміру ступеня забруднення витрати припливу стічних вод. 1 UA 102316 C2 5 10 15 20 25 30 35 40 45 50 55 Під датчиками виміру ступеня забруднення стічних вод маються на увазі датчики, що працюють у безперервному режимі і вимірюють, наприклад, кількість азоту амонійних солей, нітритів, нітратів, фосфатів, зважених речовин, загального органічного вуглецю й інших. В другу групу аеротенків подають надлишок витрати припливу стічних вод, де величина годинного навантаження по забруднюючим стічні води речовинам може змінюватися від нуля до різниці між максимальними і мінімальними годинними навантаженнями по забруднюючим стічні води речовинам. Процес аеробного біологічного очищення стічних вод у другій групі аеротенків можливо здійснювати, наприклад, на реакторі періодичної дії. При цьому добові коливання годинного навантаження по забруднюючим стічні води речовинам і добові зміни концентрації забруднюючих стічні води речовин впливають на режим харчування тільки меншої частини стічних вод, що очищаються, що в сумі, при змішанні очищених стічних вод з виходів із вторинних відстійників підвищує ефективність очищення і поліпшує якість очищених стічних вод, підвищує стабільність і надійність роботи очисних споруджень. 3 3 Наприклад, стічні води з витратою Q, що змінюється, від 1500 м /год. до 1800 м /год. і різною концентрацією С(БПК5) забруднюючих речовин у межах від 300 мг/л до 400 мг/л і надходять на очисні спорудження, де витрата Q стічних вод розділяється автоматично за допомогою регуляторів при керуванні програмувальним логічним блоком на дві групи аеротенків, де в 3 3 першій групі аеротенків витрата Q1 може змінюватися від 750 м /год. до 1200 м /год., а питоме навантаження ТL1(БПК5) по забруднюючим стічні води в першій групі аеротенків речовинам підтримуються постійною завбільшки 450 кг/год., а питоме навантаження TL 1(N) по азоту складає 37,5 кг/год., при цьому середня ефективність Е(БПК5) очищення стічних вод у першій групі аеротенків постійно висока, що складає по біологічній потребі в кисні 98 %, а середній ефективності E(N) по азоту 95 %. В другу групу аеротенків надходить інша частина стічних вод з витратою Q2 у межах від 300 3 3 м /год. до 1050 м /год., при питомому навантаженні ТL2(БПК5), що змінюється, по забруднюючим стічні води речовинам у межах від 150 кг/год. до 270 кг/год. Середня ефективність очищення стічних вод у другій групі аеротенків нижче, ніж у першій і складає по біологічній потребі в кисні 95 %, а по азоту 90 %. При змішанні потоків очищених стічних вод на виході з вторинних відстійників середня ефективність Е(БПК5) очищення по біологічній потребі в кисні БПК5 збільшується на 44 %, а по з'єднаннях азоту E(N) - на 53 %. При цьому концентрація забруднюючих речовин С (БПК5) в очищених стічних водах знаходиться в межах від 7,22 мг/л до 21,9 мг/л, а по азоту концентрація C(N) забруднюючих речовин в очищених стічних водах знаходиться в межах від 0,96 мг/л до 5,95 мг/л. Креслення. Блок-схема, що пояснює пропонований спосіб і пристрій автоматичного керування аеротенками. Перелік позначень на схемі. 1 - датчик витрати стічних вод; 2 - приплив стічних вод; 3 - датчики виміру ступеня забруднення стічних вод; 4 - датчики кількості мулу; 5 - датчики розчиненого кисню; 6 - логічний програмувальний блок; 7 - регулятор подачі стічних вод; 8 - перша група аеротенків; 9 - регулятор подачі стічних вод; 10 - друга група аеротенків; 11 - регулятор подачі зворотного активного мулу; 12, 13 - повітродувки; 14 - вихід суміші стічних вод і мулу з першої групи аеротенків 8; 15 - вихід суміші стічних вод і мулу з другої групи аеротенків 10; 16 - виконавчий механізм; 17 - входи логічного програмувального блока 6; 18 - виходи логічного програмувального блока 6; 19, 20 - вторинні відстійники; 21, 22 - виходи очищених стічних вод; 23, 24 - виходи надлишкового активного мулу; 25, 26 - виходи зворотного активного мулу. 2 UA 102316 C2 5 10 15 20 25 30 35 40 45 50 55 Пристрій, що реалізує спосіб автоматичного керування аеротенками, містить: датчик 1 витрати стічних вод, приплив 2 стічних вод, датчики 3 виміру ступеня забруднення стічних вод, датчики 4 кількості мулу і датчики 5 кількості розчиненого кисню, логічний програмувальний блок 6, регулятор 7 подачі стічних вод на першу групу аеротенків 8, регулятор 9 подачі стічних вод на другу групу аеротенків 10, регулятор 11 подачі зворотного активного мулу, повітродувки 12, 13, вихід 14 суміші стічних вод і мулу з першої групи аеротенків 8, вихід 15 суміші стічних вод і мулу з другої групи аеротенків 10, виконавчі механізми 16 регуляторів 7, 9, 11, входи 17 і виходи 18 логічного програмувального блока 6, вторинні відстійники 19 суміші стічних вод і мулу з першої групи аеротенків 8, вторинні відстійники 20 суміші стічних вод і мулу з другої групи аеротенків 10, вихід 21 очищених стічних вод із вторинних відстійників 19, вихід 22 очищених стічних вод із вторинних відстійників 20, вихід 23 надлишкового активного мулу з вторинних відстійників 19, вихід 24 надлишкового активного мулу з вторинних відстійників 20, вихід 25 зворотного активного мулу з вторинних відстійників 19, вихід 26 зворотного активного мулу з вторинних відстійників 20. Вихід 25 зворотного активного мулу з вторинних відстійників 19 сполучений з першою групою аеротенків 8 через регулятор 11 подачі зворотного активного мулу з першої групи аеротенків 8. Вихід 26 зворотного активного мулу з вторинних відстійників 20 сполучений з першою групою аеротенків 10 через регулятор 11 подачі зворотного активного мулу з другої групи аеротенків 10. Вихід 14 суміші стічних вод і мулу з першої групи аеротенків 8 сполучений із вторинними відстійниками 19. Вихід 15 суміші стічних вод і мулу з другої групи аеротенків 10 сполучений із вторинними відстійниками 20. Виконавчі механізми 16 з'єднані з регуляторами 7, 9 подачі стічних вод у групи аеротенків 8, 10. Логічний блок 6 виконаний програмувальним із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод. Входи 17 логічного програмувального блока 6 зв'язані з виходом датчика 1 витрати стічних вод, виходом датчика 5 кількості розчиненого кисню, виходом датчика 4 кількості зворотного мулу, виходом датчика 3 виміру ступеня забруднення витрати стічних вод. Виходи 18 логічного програмувального блока 6 зв'язані з повітродувками 12, 13 і виконавчими механізмами 16 регуляторів 7, 9 подачі стічних вод, регуляторів 11 подачі поворотного активного мулу. Під датчиками 3 виміру ступеня забруднення стічних вод маються на увазі датчики 3, що працюють у безперервному режимі і вимірюють, наприклад, кількість азоту амонійних солей, нітритів, нітратів, фосфатів, зважених речовин, загального органічного вуглецю й інших. Відповідно до способу автоматичного керування аеротенками, у паралельно працюючі аеротенки 8, 10 подають стічні води через датчик 1 витрати стічних вод і далі через регулятори 7, 9 з виконавчими механізмами 16, подачу в аеротенки 8, 10 зворотного мулу через регулятори 11 з виконавчими механізмами 16 і повітря від повітродувок 12, 13. Стічні води подають в аеротенки через датчики 3 виміру ступеня забруднення припливу 2 стічних вод, розділяють витрату стічних вод в аеротенки 8, 10 на дві групи, де в одній із двох груп аеротенків 8, 10, наприклад, першій групі аеротенків 8 підтримують постійне навантаження по забруднюючим стічні води речовинам, причому автоматичне керування аеротенками здійснюють через логічний програмувальний блок 6 із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, причому необхідні кількості зворотного мулу і повітря подають в аеротенки 8, 10 по встановленій у логічному програмувальному блоці 6 розрахунковій моделі з урахуванням ступеня забруднення припливу 2 стічних вод. Пристрій автоматичного керування аеротенками працює в такий спосіб. Витрату стічних вод розділяють на дві автономні групи аеротенків 8, 10. Сигнали від датчика 1 витрати стічних вод і датчиків 3 виміру ступеня забруднення стічних вод надходять на відповідні входи логічного програмувального блока 6. Логічний програмувальний блок 6 порівнює поточне навантаження з заданим постійним навантаженням для першої групи аеротенків 8 і подає сигнал на регулятор 7 витрати стічних вод, що забезпечує постійне годинне навантаження по забруднюючим стічні води речовинам. Інша частина витрати стічних вод через регулятор 9 надходить на другу групу аеротенків 10 відповідно до формули: TL2 TL TL1 Q k Q1 k 1 const , 3 UA 102316 C2 5 10 15 20 25 30 35 40 45 50 55 60 де TL - питоме навантаження ступеня забруднення припливу 2 стічних вод на очисні спорудження, TL1 і ТL2 - відповідне питоме навантаження ступеня забруднення стічних вод на першу групу аеротенків 8 і другу групу аеротенків 10 відповідно, Q і Q 1 - витрата стічних вод, загальний для очисних споруджень і для першої групи аеротенків 8 відповідно, k і k 1 концентрації забруднюючих речовин загальні для очисних споруджень і для першої групи споруджень 8 відповідно. Потім величина ТL1, що є постійною, порівнюється з величиною TL і на підставі отриманої різниці подається сигнал керування на регулятор 7 витрати стічних вод. Керування технологічним процесом здійснюється логічним програмувальним блоком 6, згідно з установленою в ньому математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, що включає аеробне біологічне очищення стічних вод активним мулом в аеротенках 8, відстоювання суміші стічної води й активного мулу у вторинних відстійниках, подачу зворотного активного мулу в аеротенки 8 для участі в біохімічному процесі окислювання, відвід надлишкового активного мулу з вторинних відстійників і відвід очищених стічних вод з очисних споруджень. Математична модель, встановлена в логічний програмувальний блок 6 являє собою модель роботи активного мулу, наприклад, ASM (active sludge model). Модель калібрується і набудовується, з огляду на специфіку стічних вод очисних споруджень у кожнім конкретному випадку, але математичні залежності моделі залишаються постійними. На виході логічного програмувального блока 6 утворюються сигнали, що керують роботою повітродувок 12, 13, регуляторами 7, 9 витрати стічних вод, що подають в аеротенки 8, 10, регуляторами 11 кількості зворотного мулу, що подають в аеротенки 8, 10. Продуктивність повітродувок 12, 13 визначається в залежності від сигналу датчика 5 кількості розчиненого кисню, з корекцією по сигналах датчика 1 витрати стічних вод і датчиків 3, що вимірюють ступінь забруднення стічних вод. Так само визначається і виробляється регулювання подачі зворотного активного мулу регуляторами 11 подачі зворотного мулу і відводом надлишкового мулу з вторинних відстійників (на схемі не показані). Кількість подаваного повітря для першої групи аеротенків 8 повітродувками 12 завжди є величиною постійною. Кількість подаваного повітря для другої групи аеротенків 10 повітродувками 13 є величиною змінюваною і визначається логічним програмувальним блоком 6 із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, що включає аеробне біологічне очищення стічної води активним мулом в аеротенках 10, відстоювання суміші стічної води і зворотного активного мулу у вторинних відстійниках, подачу зворотного активного мулу в аеротенк 10 для участі в біохімічному процесі окислювання, відвід надлишкового активного мулу з вторинних відстійників і відвід очищених стічних вод з очисних споруджень. Кількість активного мулу в аеротенках 8, 10 установлюється відповідно до показань датчиків 4 кількості мулу регуляторами 11 кількості зворотного мулу подаваного по сигналу від логічного програмувального блока 6. В другу групу аеротенків 10 подають надлишок витрати припливу 2 стічних вод, де величина годинного навантаження по забруднюючим стічні води речовинам може змінюватися від нуля до різниці між максимальними і мінімальними годинними навантаженнями по забруднюючим стічні води речовинам. Процес аеробного біологічного очищення стічних вод у другій групі аеротенків 10 можливо здійснювати, наприклад, на реакторі періодичної дії (на кресленнях не показаний). При цьому добові коливання годинного навантаження по забруднюючим стічні води речовинам і добові зміни концентрації забруднюючих стічні води речовин впливають на режим харчування тільки меншої частини стічних вод, що очищаються, що в сумі, при змішанні очищених стічних вод з виходів 21, 22 із вторинних відстійників 19, 20 підвищує ефективність очищення і поліпшує якість очищених стічних вод, підвищує стабільність і надійність роботи очисних споруджень. 3 3 Наприклад, стічні води з витратою Q, що змінюється від 1500 м /год. до 1800 м /год. і різної концентрації С(БПК5) забруднюючих речовин у межах від 300 мг/л до 400 мг/л і надходять на очисні спорудження, де витрата Q стічних вод розділяється автоматично за допомогою регуляторів 7, 9 при керуванні програмувальним логічним блоком на дві групи аеротенків 8, 10, 3 3 де в першій групі аеротенків 8 витрата Q1 може змінюватися від 750 м /год. до 1200 м /год., а питоме навантаження TL1(БПК5) по забруднюючим стічні води речовинам у першій групі аеротенків 8 підтримується постійною завбільшки 450 кг/год., а питоме навантаження TL 1(N) по азоту складає 37,5 кг/год., при цьому середня ефективність Е(БПК5) очищення стічних вод у першій групі аеротенків 8 постійно висока, складова по біологічній потребі в кисні 98 %, а середня ефективність E(N) по азоті 95 %. 4 UA 102316 C2 5 10 В другу групу аеротенків 10 надходить інша частина стічних вод з витратою Q 2 у межах від 3 3 300 м /год. до 1050 м /год., при питомому навантаженні, що змінюється, по забруднюючі стічні води речовинам у межах для ТL2(БПК5) від 150 до 270 кг/год, a TL2(N) от 7,5 до 42,0 кг/год. Середня ефективність очищення стічних вод у другій групі аеротенків 10 нижче, ніж у першій групі аеротенків 8 і по біологічній потребі в кисні Е(БПК5) складає 95 %, а по азоту E(N) складає 90 %. При змішанні потоків очищених стічних вод на виходах 21, 22 із вторинних відстійників 19, 20 середня ефективність Е(БПК5) очищення по біологічній потребі в кисні БПК5 збільшується на 44 %, а по з'єднаннях азоту E(N) - на 53 %. При цьому концентрація забруднюючих речовин С(БПК5) в очищених стічних водах знаходиться в межах від 7,22 мг/л до 21,9 мг/л, а по азоту концентрація забруднюючих речовин C(N) в очищених стічних водах знаходиться в межах від 0,96 мг/л до 5,95 мг/л. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 1. Спосіб автоматичного керування аеротенками, що включає подачу в паралельно працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок, який відрізняється тим, що стічні води подають в аеротенки через датчики виміру ступеня забруднення припливу стічних вод, розділяють витрату стічних вод в аеротенки на дві групи, де в одній з двох груп аеротенків підтримують постійне навантаження по забруднюючим стічні води речовинам, причому автоматичне керування аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, причому необхідні кількості зворотного мулу і повітря подають в аеротенки по встановленій у логічному блоці розрахунковій моделі з урахуванням ступеня забруднення припливу стічних вод. 2. Пристрій автоматичного керування аеротенками, що містить датчик витрати стічних вод, виконавчі механізми з регуляторами подачі стічних вод в аеротенки, датчики кількості розчиненого кисню, повітродувки, виконавчі механізми з регуляторами подачі зворотного мулу в аеротенки, логічний блок, входи якого зв'язані з датчиком витрати стічних вод і датчиками кількості розчиненого кисню, а виходи логічного блока зв'язані з повітродувками і виконавчими механізмами регуляторів подачі зворотного мулу в аеротенки, який відрізняється тим, що містить датчики кількості зворотного мулу, датчики виміру ступеня забруднення витрати стічних вод, виходи яких зв'язані з відповідними входами логічного блока, що виконаний програмувальним із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод. 5 UA 102316 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюProcess and device for automatic control of aerotanks
Автори англійськоюKolesnik Yurii Vasyliovych, Meshenhisser Yurii Mykhailovych, Smyrnov Oleksandr Volodymyrovych, Veriutin Serhii Viacheslavovych
Назва патенту російськоюСпособ и устройство автоматического управления аэротенками
Автори російськоюКолесник Юрий Васильевич, Мешенгиссер Юрий Михайлович, Смирнов Александр Владимирович, Верютин Сергей Вячеславович
МПК / Мітки
МПК: C02F 3/14
Мітки: автоматичного, спосіб, аеротенками, пристрій, керування
Код посилання
<a href="https://ua.patents.su/8-102316-sposib-i-pristrijj-avtomatichnogo-keruvannya-aerotenkami.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій автоматичного керування аеротенками</a>
Кавітаційний пристрій для очищення та знезараження стічних вод
Номер патенту: 61782
Опубліковано: 25.07.2011
Автор: Веретільник Тимофій Іванович
Мітки: вод, очищення, пристрій, стічних, кавітаційний, знезараження
Формула / Реферат:
Кавітаційний пристрій для очищення та знезараження стічних вод, що містить решітку, піскоуловлювачі, первинні та вторинні відстійники, аеротенки, хлораторну установку, систему трубопроводів, який відрізняється тим, що кавітаційні аератори змонтовано на первинних відстійниках, а система знезараження, яка складається з гідродинамічного кавітаційного реактора та ультрафіолетового генератора, змонтована на вторинних відстійниках.
Пристрій для автоматичного керування електроспоживанням

Номер патенту: 62126
Опубліковано: 10.08.2011
Автори: Савеленко Іван Володимирович, Сіріков Олександр Іванович, Плєшков Петро Григорович
МПК: H02J 13/00
Мітки: електроспоживанням, керування, пристрій, автоматичного
Формула / Реферат:
Пристрій для автоматичного керування електроспоживанням, який має первинні датчики витрати електроенергії, що підключені до блока прийому інформації, який відрізняється тим, що блок прийому інформації від первинних датчиків підключений до мікроконтролера, додатково введені блоки прийому інформації від лічильників технічного і комерційного обліку, виходи з яких підключені до мікроконтролера, а вихід з мікроконтролера підключений до блока...
Спосіб керування процесом біологічного очищення стічних вод
Номер патенту: 75550
Опубліковано: 10.12.2012
Автори: Уваров Юрій Володимирович, Петухова Олена Анатоліївна, Горносталь Стелла Анатоліївна
МПК: G05D 27/00, C02F 3/02
Мітки: біологічного, очищення, стічних, спосіб, процесом, керування, вод
Формула / Реферат:
1. Спосіб керування процесом біологічного очищення стічних вод в аеротенках і вторинних відстійниках, що включає вимірювання та регулювання тиску повітря в збірному трубопроводі, вимірювання витрати мулової суміші з кожного аеротенка та зміну витрат стічної води, повітря та зворотного мулу на основі аналізів очищеної води, який відрізняється тим, що додатково визначають розміри коридору аеротенка та на основі одержаної інформації оперативно...
Пристрій для автоматичного керування виїмковою машиною
Номер патенту: 55652
Опубліковано: 27.12.2010
Автори: Бакуменко Володимир Степанович, Строяковський Лев Мейєрович
МПК: E21C 35/24
Мітки: керування, пристрій, машиною, виїмковою, автоматичного
Формула / Реферат:
Пристрій для автоматичного керування виїмковою машиною, що містить датчики струму, сполучені з входами регулятора струмів навантаження двигунів, який відрізняється тим, що містить два додаткових датчики струму, виходи котрих сполучені з додатковим регулятором, що має два порогові входи, два реле, контакти яких введені в коло керування двигунів, датчики, які контролюють зусилля притиснення модуля видобутку до забою, вихід яких через блок...
Спосіб очищення стічних вод від біогенних елементів
Номер патенту: 62216
Опубліковано: 25.08.2011
Автори: Малбієв Борис Юрійович, Єсін Михайло Анатолійович, Щетінін Анатолій Іванович
МПК: C02F 3/30
Мітки: спосіб, вод, елементів, біогенних, стічних, очищення
Формула / Реферат:
Спосіб очищення стічних вод від біогенних елементів, що включає механічне очищення на решітках, пісколовках і первинних відстійниках, біологічне очищення за допомогою активного мулу, яке здійснюють в анаеробній і аеробній зонах в аеротенках, при цьому в анаеробній зоні процес ведуть при перемішуванні стічної води з муловою сумішшю, узятої на виході з аеробної зони, відділення активного мулу від води у вторинному відстійнику, повернення мулу...
Попередній патент: Датчик параметрів технологічних процесів з живленням від струмової петлі 4-20 ма
Наступний патент: Фурма для продувки конвертерної ванни
Випадковий патент: N-ацильні похідні амінокислот, спосіб їх одержання, фармацевтична композиція і їх застосування як протиалергічних, протизапальних і гіполіпідемічних засобів