Мобільна суміщена інформаційно-вимірювальна система
Номер патенту: 102676
Опубліковано: 10.11.2015
Автори: Коломійцев Олексій Володимирович, Третяк В'ячеслав Федорович, Кулагін Костянтин Костянтинович, Руденко Дмитро Васильович, Посохов Віталій Васильович, Сачук Ігор Іванович, Павлій Владислав Олександрович, Пустоваров Володимир Володимирович, Курцева Лілія Борисівна


Формула / Реферат
Мобільна суміщена інформаційно-вимірювальна система, яка містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', електронної обчислювальної машини, інформаційний блок з розширеними можливостями та оптико-електронний модуль, який складається з телевізійного і інфрачервоного каналів, яка відрізняється тим, що додатково введено в систему гіростабілізовану платформу.
Текст
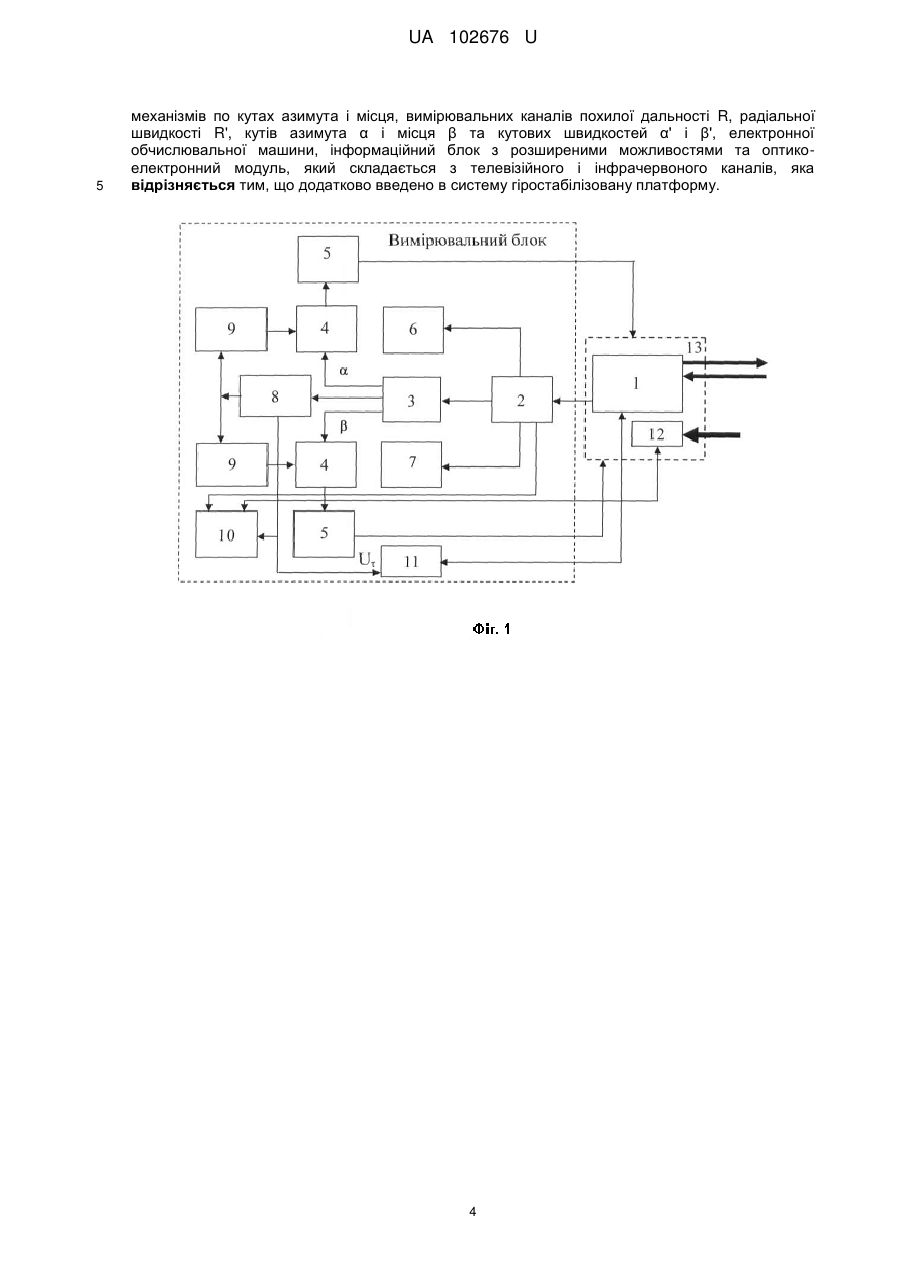
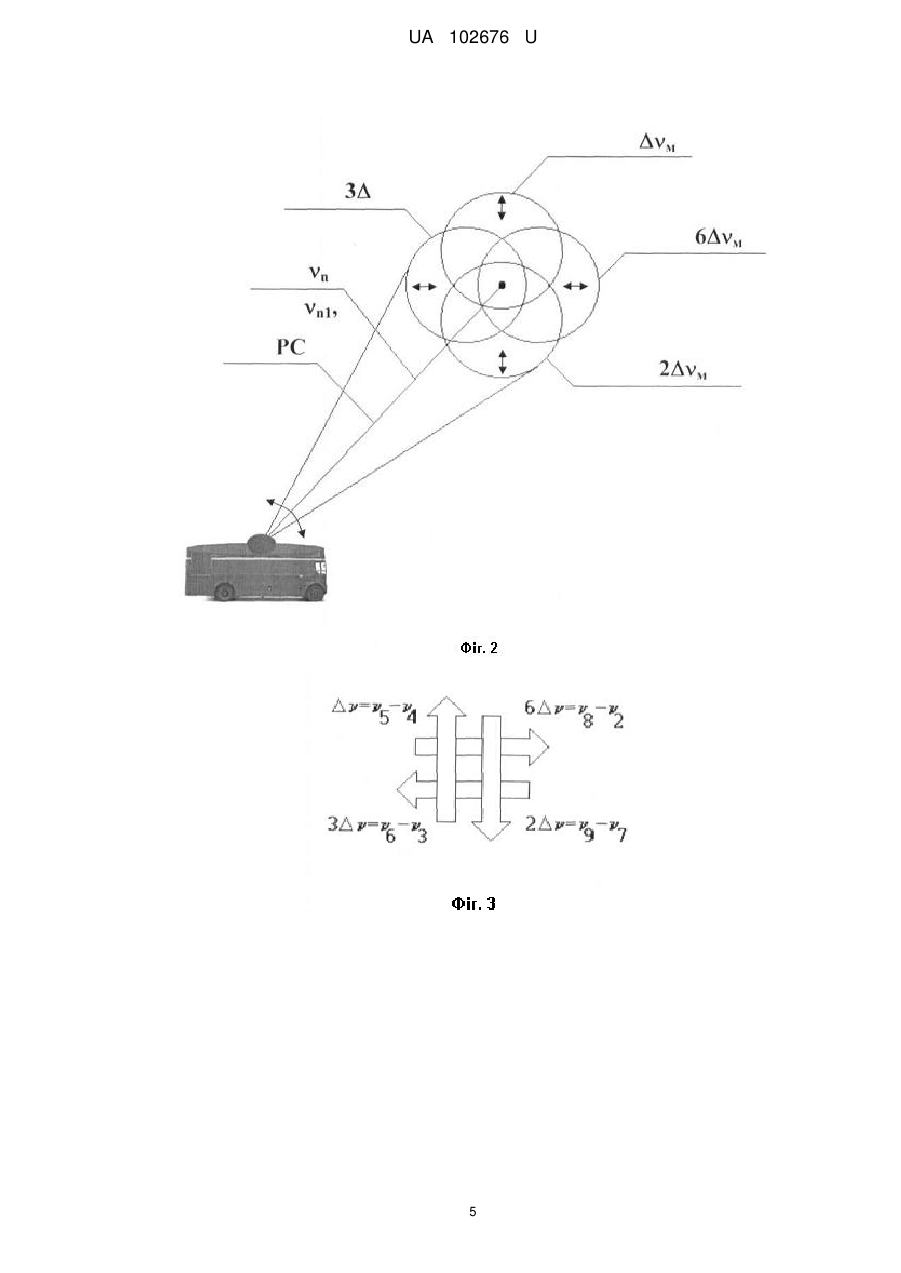
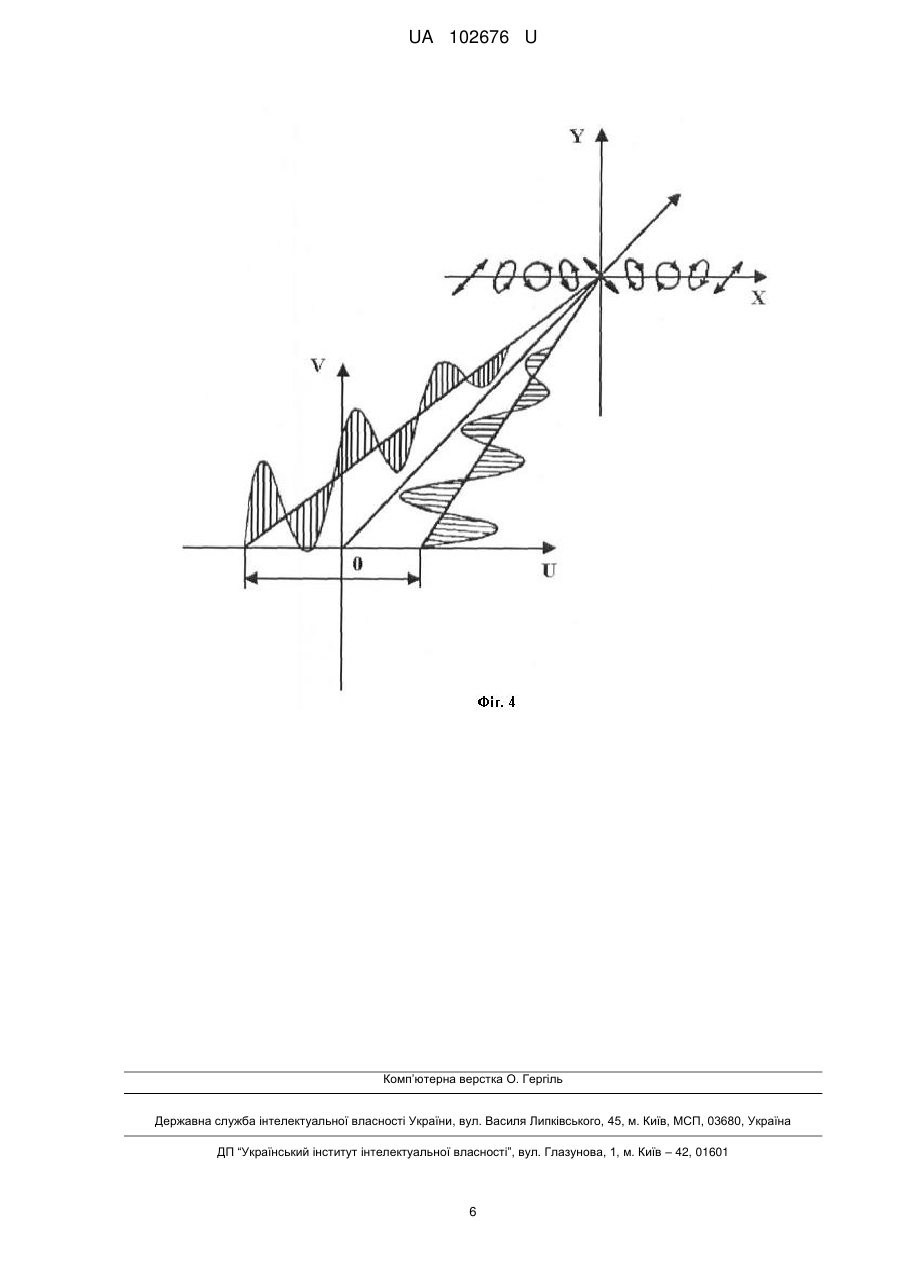
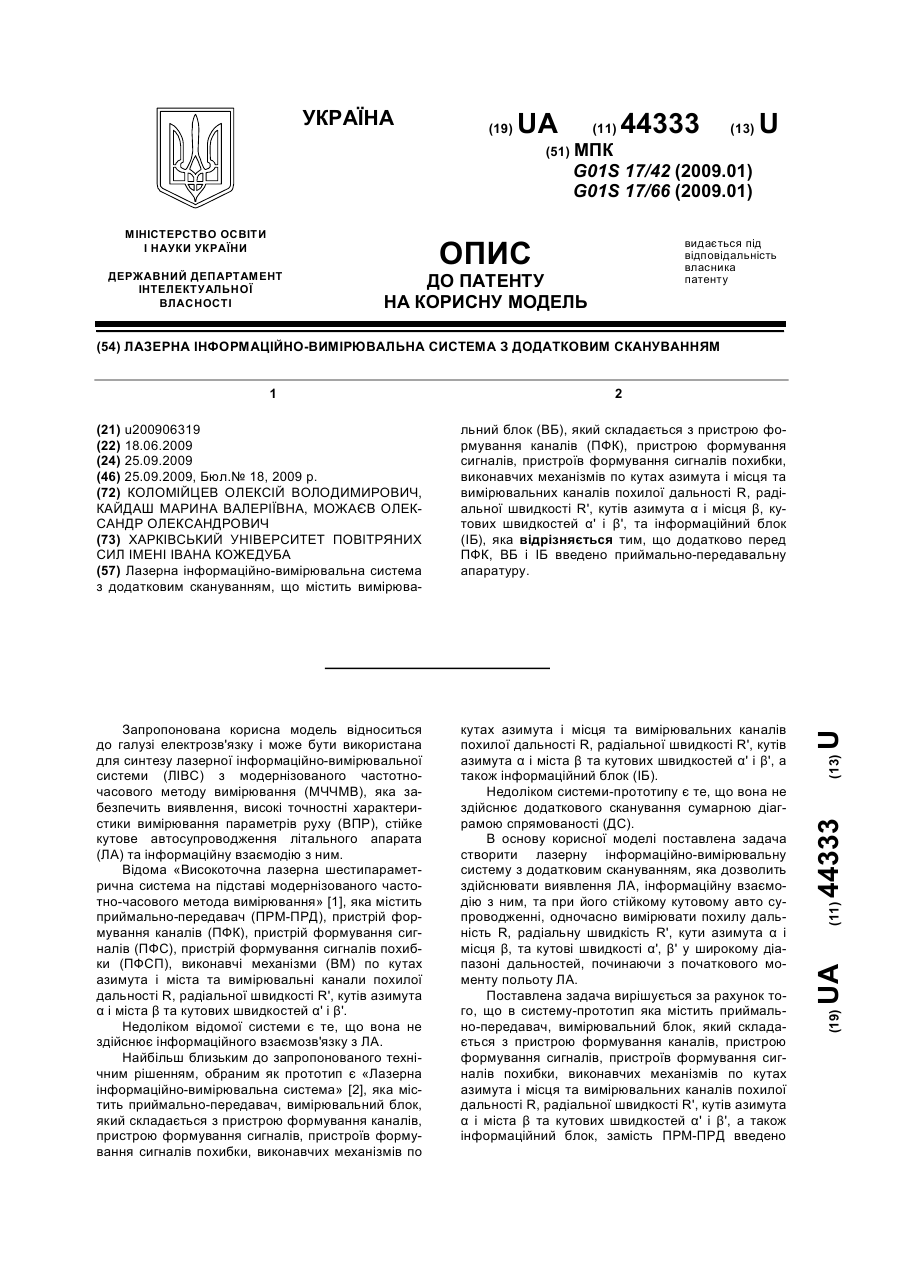
Реферат: Мобільна суміщена інформаційно-вимірювальна система містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', електронної обчислювальної машини. Інформаційний блок з розширеними можливостями та оптико-електронний модуль, який складається з телевізійного і інфрачервоного каналів. Додатково введено в систему гіростабілізовану платформу. UA 102676 U (12) UA 102676 U UA 102676 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі електрозв'язку і може бути використана для синтезу мобільної суміщеної інформаційно-вимірювальної системи (МСІВС) для пошуку літального апарата (ЛА), розпізнавання, вимірювання параметрів руху та передачі команд керування. Відома "Лазерна інформаційно-вимірювальна система з розширеними можливостями" [1], яка містить приймально-передавальну апаратуру (ПРМ-ПРД А), вимірювальний блок (ВБ), який складається з пристрою формування каналів (ПФК), пристрою формування сигналів (ПФС), пристроїв формування сигналів похибки (ПФСП), виконавчих механізмів (ВМ) по кутах азимута і місця, вимірювальних каналів похилої дальності R і радіальної швидкості R', кутів азимута α і місця β кутових швидкостей α' і β' та інформаційний блок з розширеними можливостями (ІБРМ). Недоліком відомої системи є те, що вона не забезпечує об'єктивний контроль у денних і нічних умовах та збереження інформації, яка оброблена під час проведення випробувань ЛА. Найбільш близьким до запропонованої корисної моделі за технічним рішенням, вибраним як прототип є "Лазерна інформаційно-вимірювальна система з оптико-електронним модулем для полігонного випробувального комплексу" [2], яка містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', електронної обчислювальної машини (ЕОМ), інформаційний блок з розширеними можливостями та оптико-електронний модуль (OЕM), який складений з телевізійного і інфрачервоного каналів. Недоліком системи-прототипу є те, що вона не забезпечує дотримання просторової стабілізації ПРМ-ПРД А. В основу корисної моделі поставлена задача створити мобільну суміщену інформаційновимірювальну систему, яка дозволить здійснювати виявлення ЛА, видачу команд керування та, при його стійкому кутовому автосупроводженні, одночасно вимірювати похилу дальність R до ЛА, радіальну швидкість R', кути азимута α і місця β, кутові швидкості α', β' у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, об'єктивний контроль, розширення функціональних можливостей під час проведення випробувань ЛА у денний і нічний час, збереження інформації, яка оброблена під час проведення випробувань ЛА, дотримання просторової стабілізації ПРМ-ПРД А та, в разі необхідності, завдяки використанню поляризаційних ознак ЛА, що отримуються, детально розпізнавати його за короткий час. Поставлена задача вирішується тим, що містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', електронної обчислювальної машини, інформаційний блок з розширеними можливостями та оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, згідно з корисною моделлю, додатково в систему введено гіростабілізовану платформу (ГП). Побудова мобільної суміщеної інформаційно-вимірювальної системи пов'язана з використанням одномодового багаточастотного з синхронізацією подовжніх мод випромінювання єдиного лазера-передавача, частотно-часового методу (ЧЧМ) [3] та ЕОМ. На фіг. 1 приведена узагальнена структурна схема запропонованої МСІВС. На фіг. 2 приведено створення рівносигнального напрямку (РСН) та сканування сумарною діаграмою спрямованості (ДС) лазерного випромінювання у невеликому куті і окремо 4-ма ДС в ортогональних площинах. На фіг. 3 приведено зустрічне сканування пар парціальних ДС у кожній з двох ортогональних площин. На фіг. 4 приведено створення лазерного сигналу з просторовою модуляцією поляризації. Запропонована мобільна суміщена інформаційно-вимірювальна система містить приймально-передавальну апаратуру (1), вимірювальний блок, який складається з пристрою формування каналів (2), пристрою формування сигналів (3), пристроїв формування сигналів похибки (4), виконавчих механізмів по кутах азимута і місця (5), вимірювальних каналів похилої дальності R (6), радіальної швидкості R' (7), кутів азимута α і місця β (8) та кутових швидкостей α' і β' (9), електронної обчислювальної машини (10), інформаційний блок з розширеними можливостями (11), оптико-електронний модуль, який складається з телевізійного і інфрачервоного каналів (12) та гіростабілізованої платформи (13). Робота мобільної суміщеної інформаційно-вимірювальної системи полягає у наступному. Зі спектра випромінювання одномодового багаточастотного з синхронізацією подовжніх мод 1 UA 102676 U 5 10 15 20 25 30 35 40 45 50 55 лазера-передавача за допомогою модифікованого селектора подовжніх мод (МСПМ) [4], виділяються необхідні моди та їх комбінації для створення: - РСН на основі формування сумарної ДС лазерного випромінювання, завдяки 4-м парціальним діаграмам спрямованості, що частково перетинаються, за умови використання комбінацій подовжніх мод ("підфарбованих" різницевими частотами міжмодових биттів, фіг. 2) Δv 54=v5-v4=Δvм, Δv97=v9-v7=2Δvм, Δv63=v6-v3=3Δvм, Δv82=v8-v2=6Δvм. - багатоканального (N) інформаційного зв'язку, за умови використання сигналу подовжніх мод (на несучих частотах vn); - лазерного сигналу з просторовою модуляцією поляризації, за умови використання сигналу з двох подовжніх мод (несучих частот vn1, vn2). За допомогою МСПМ та ІБРМ створюється лазерний сигнал з просторовою модуляцією поляризації шляхом створення лазерного випромінювання з двох несучих частот (vn1 і vn2) у вигляді двох променів з вертикальною (vn1) та горизонтальною (vn2) поляризацією (фіг. 4). При цьому випромінювання апертури першого і другого поляризаційних каналів в апертурній площині V0U рознесені на відомій відстані Δvq. Різність ходу пучків до картинної площині ЛА Х0У змінюється вдовж осі X від точки до точки. Обумовлена цим різність фаз (амплітуд) між поляризованими компонентами, що ортогональні, поля у картинної площині також змінюється від точки до точки. В залежності від різності фаз (амплітуд) у картинній площині змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної до начальної і тощо. Період зміни вигляду поляризації визначається базою між випромінювачами Δvq та відстанню до картинної площині R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції та дорівнює значенню ступеня поляризації випромінювання, що відбито в даній ділянці поверхні ЛА. Створення РСН, який проходить через ЛА, дозволяє сформувати багатоканальну (N на несучих частотах νn) передачу команд управління ЛА від ПРМ-ПРД А МСІВС до ПРМ-ПРД А ЛА. Лазерні сигнали з просторовою модуляцією поляризації (vn1 і vn2) від ІБРМ через ПРМ-ПРД А МСІВС також проходять повздовж РСН та, відбиваючись від поверхні ЛА, у зворотному напрямку приймаються ПРМ-ПРД А, чим забезпечують його детальне розпізнавання (фіг. 2). При відбитті лазерного сигналу з просторовою модуляцією поляризації, що зондує, від поверхні ЛА змінюються амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно, комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту модуляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо, що відображається в ЕОМ. Тому у ІБРМ також здійснюється поляризаційна обробка поля, що приймається. Зустрічне сканування пар парціальних ДС лазерного випромінювання у кожній з двох ортогональних площин, призводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування (похибки по кутах), а також до зміни тривалостей огинаючих пачок імпульсів частот міжмодових биттів за неповний прохід ДС у прямому або зворотному напрямку сканування відбитого сигналу від ЛА (похибки по кутовим швидкостям), який приймається ПРМ-ПРД А(фіг. 3). ПФК розподіляє сигнали похибок по вимірювальним каналам МСІВС. Зустрічне сканування пар парціальних ДС лазерного випромінювання у кожній з двох ортогональних площин дозволяє вимірювати як похилу дальність до ЛА по запізнюванню частот міжмодових биттів каналом вимірювання R, так і його радіальну швидкість допплерівським методом каналом вимірювання R'. При цьому вибирається режим зустрічного сканування парами парціальних ДС лазерного випромінювання у кожній з двох ортогональних площин, який відповідає напівперекриттю ДС (фіг. 2). У ПФС сигнали, які отримані від зустрічного сканування пар парціальних ДС лазерного випромінювання у кожній з двох ортогональних площин, перетворюються, завдяки зрушенням огинаючих періодів пачок імпульсів частот міжмодових биттів, у сигнали кутів азимута α і місця β та перетворюються, завдяки зрушенням напівперіодів (тривалостей) огинаючих пачок імпульсів частот міжмодових биттів за один прохід ДС, в одному напрямку сканування (прямому або зворотному), у сигнали кутової (тангенціальної) швидкості ЛА у каналі вимірювання кутових швидкостей α' і β'. 2 UA 102676 U 5 10 15 20 25 30 35 40 45 50 За зрушеннями огинаючих періодів пачок імпульсів частот міжмодових биттів, у пристроях формування сигналів похибки (ПФСП - по кутах азимута α і місця β), формуються сигнали похибки по кутових координатах, що корегуються прогнозованими динамічними похибками, які через ВМ по кутах азимута α і місця β розвертають платформу, на якій розміщені ЕОМ та ПРМПРД А таким чином, щоб РСН постійно проходив через ЛА. Оптико-електронний модуль постійно здійснює у денних і нічних умовах у видимому та інфрачервоному діапазонах спостереження за ЛА, який супроводжується. Об'єктивний контроль та інформація про зовнішньо траєкторні вимірювання ЛА (похилу дальність R до ЛА, радіальну швидкість R', кути азимута α і міста β, кутові швидкості α', β') обробляється, відображається та запам'ятовується у ЕОМ. Збереження інформації, яка оброблена під час проведення випробувань ЛА, здійснюється в пам'яті ЕОМ. Для цього використовується база даних - сукупність взаємопов'язаних даних, організованих у відповідності до схеми даних таким чином, щоб з ними міг працювати користувач. Підвищення швидкості обробки інформації, яка надходить на ЕОМ здійснюється за рахунок використання методів та моделей паралельної часопараметризованої обробки даних. Вимірювальна інформація про тангенціальну складову швидкості (кутові швидкості) ЛА від каналу кутових швидкостей використовується в ІБРМ, де завдяки додатковій обробці елементів поляризаційної матриці розсіяння ЛА від отриманого поляризаційного поля (суми сигналів різної поляризації) забезпечується точне значення кутових швидкостей ЛА, розширюється набір ознак його розпізнавання, підвищується ефективність та скорочується час на розпізнавання ЛА, що супроводжується. Кількість інформаційних каналів (N) залежить від кількості комбінацій парних мод (несучих частот νn), які мають необхідні вихідні характеристики для використання. В разі необхідності виявлення ЛА у заданої точці простору, складений з частот міжмодових биттів груповий сигнал сканується у вигляді сумарної ДС лазерного випромінювання за допомогою модифікованого блока дефлекторів (ПРМ-ПРД А), де кут та напрямок відхилення сумарної ДС задається блоком керування дефлекторів. Гіростабілізована платформа забезпечує дотримання просторової стабілізації ПРМ-ПРД А системи. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у виявленні ЛА, високоточному вимірюванні похилої дальності R, радіальної швидкості R', кутів азимута α і місця β, кутових швидкостей α' і β' у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, передачі команд керування, здійсненні об'єктивного контролю у денних і нічних умовах, збереженні обробленої інформації, просторової стабілізації ПРМ-ПРД А та розпізнаванні ЛА. Джерела інформації: 1. Патент на корисну модель № 62832, Україна, МПК G01S 17/42, G01S 17/66. Лазерна інформаційно-вимірювальна система з розширеними можливостями. / О.В. Коломійцев, Г.В. Альошин, Д.В. Васильєв та ін. - № u201106755; заяв. 30.05.2011; опубл. 12.09.2011; Бюл. № 17. - 8 с. 2. Патент на корисну модель № 91270, Україна, МПК G01S 17/42, G01S 17/66. Лазерна інформаційно-вимірювальна система з оптико-електронним модулем для полігонного випробувального комплексу. / О.В. Коломійцев, І.І. Сачук, Г.В. Альошин та ін. - № u201401198, заяв. 07.02.2014; опубл. 25.06.2014; Бюл. № 12. - 5 с. 3. Патент на корисну модель № 55645, Україна, MПК G01S 17/42, G01S 17/66. Частотночасовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарату. / О.В. Коломійцев - № u201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. № 24. - 14 с. 4. Патент на корисну модель № 75134, Україна, МПК G01S 17/42, G01S 17/66. Канал автоматичного супроводження літальних апаратів за напрямком з МСПМ та розширеними можливостями для ЛІВС полігонного випробувального комплексу. /О.В. Коломійцев, О.С. Балабуха, К.П. Квіткін та ін. - № u201204803; заяв. 17.04.2012; опубл. 26.11.2012; Бюл. № 22. 7 с. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Мобільна суміщена інформаційно-вимірювальна система, яка містить приймальнопередавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих 3 UA 102676 U 5 механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', електронної обчислювальної машини, інформаційний блок з розширеними можливостями та оптикоелектронний модуль, який складається з телевізійного і інфрачервоного каналів, яка відрізняється тим, що додатково введено в систему гіростабілізовану платформу. 4 UA 102676 U 5 UA 102676 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMobile combined information and measuring system
Автори англійськоюKurtseva Lilia Borysivna, Kolomiitsev Oleksii Volodymyrovych, Sachuk Ihor Ivanovych, Kulahin Kostiantyn Kostiantynovych, Pavlii Vladyslav Oleksandrovych, Posokhov Vitalii Vasyliovych, Pustovarov Volodymyr Volodymyrovych, Rudenko Dmytro Vasyliovych, Tretiak Viacheslav Fedorovych
Назва патенту російськоюМобильная совмещенная информационно-измерительная система
Автори російськоюКурцева Лилия Борисовна, Коломийцев Алексей Владимирович, Сачук Игорь Иванович, Кулагин Константин Константинович, Павлий Владислав Александрович, Посохов Виталий Васильевич, Пустоваров Владимир Владимирович, Руденко Дмитрий Васильевич, Третьяк Вячеслав Федорович
МПК / Мітки
МПК: G01S 17/00
Мітки: інформаційно-вимірювальна, система, суміщена, мобільна
Код посилання
<a href="https://ua.patents.su/8-102676-mobilna-sumishhena-informacijjno-vimiryuvalna-sistema.html" target="_blank" rel="follow" title="База патентів України">Мобільна суміщена інформаційно-вимірювальна система</a>
Лазерна інформаційно-вимірювальна система з додатковим скануванням
Номер патенту: 44333
Опубліковано: 25.09.2009
Автори: Можаєв Олександр Олександрович, Кайдаш Марина Валеріївна, Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: інформаційно-вимірювальна, скануванням, лазерна, додатковим, система
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з додатковим скануванням, що містить вимірювальний блок (ВБ), який складається з пристрою формування каналів (ПФК), пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β, кутових швидкостей α' і β', та інформаційний блок...
Лазерна інформаційно-вимірювальна система з можливістю розпізнавання ла
Номер патенту: 55506
Опубліковано: 10.12.2010
Автори: Подорожняк Андрій Олексійович, Балабуха Олексій Сергійович, Васильєв Дмитро Геннадійович, Можаєв Олександр Олександрович, Злотніков Андрій Львович, Пєвцов Геннадій Володимирович, Приходько Дмитро Петрович, Сачук Ігор Іванович, Приходько Володимир Мусійович, Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: система, розпізнавання, можливістю, лазерна, інформаційно-вимірювальна
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з можливістю розпізнавання ЛА, що містить приймач-передавач (ПРМ-ПРД), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і міста та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і міста β та кутових швидкостей α' і β',...
Лазерна інформаційно-вимірювальна система з можливістю розпізнавання ла
Номер патенту: 51038
Опубліковано: 25.06.2010
Автори: Клівець Сергій Іванович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Катунін Альберт Миколайович, Садовий Костянтин Віталійович, Бєлімов Володимир Васильович, Третяк В'ячеслав Федорович, Ковальчук Андрій Олексійович, Васильєв Дмитро Геннадійович, Нерубацький Володимир Омельянович
МПК: G01S 17/66, G01S 17/42
Мітки: лазерна, розпізнавання, інформаційно-вимірювальна, система, можливістю
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з можливістю розпізнавання ЛА, що містить приймально-передавальну апаратуру (ПРМ-ПРД А), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей...
Лазерна інформаційно-вимірювальна система
Номер патенту: 23214
Опубліковано: 10.05.2007
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: лазерна, інформаційно-вимірювальна, система
Формула / Реферат:
Лазерна інформаційно-вимірювальна система, що містить приймач-передавач (ПРМ-ПРД), пристрій формування каналів, пристрій формування сигналів, пристрій формування сигналів похибки, виконавчі механізми по кутах азимута і місця та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', яка відрізняється тим, що додатково після ПРМ-ПРД введений інформаційний...
Лазерна інформаційно-вимірювальна система з додатковими можливостями
Номер патенту: 62833
Опубліковано: 12.09.2011
Автори: Луковський Олег Ярославович, Дзігора Олександр Михайлович, Хударковський Костянтин Ігорович, Рубан Ігор Вікторович, Альошин Геннадій Васильович, Сачук Ігор Іванович, Красношапка Ігор Валерійович, Коломійцев Олексій Володимирович, Осієвський Сергій Валерійович, Васильєв Дмитро Геннадійович
МПК: G01S 17/42, G01S 17/66
Мітки: можливостями, додатковими, система, інформаційно-вимірювальна, лазерна
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з додатковими можливостями, яка містить приймач-передавач (ПРМ-ПРД), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута a і місця b та кутових швидкостей a' і b', яка відрізняється тим,...
Попередній патент: Електрогідравлічний слідкуючий привід з астатичним електронним регулятором
Наступний патент: Термокомпенсований кварцовий генератор з керованим п’єзорезонатором
Випадковий патент: Вогнетривка розливальна труба та вузол, що включає вогнетривку розливальну трубу