Електрогідравлічний слідкуючий привід з астатичним електронним регулятором
Номер патенту: 102675
Опубліковано: 10.11.2015
Автори: Мельников В'ячеслав Євгенович, Бабенко Ігор Анатолійович, Козлова Марина Леонідівна, Канюк Геннадій Іванович

Формула / Реферат
Електрогідравлічний слідкуючий привід з астатичним електронним регулятором, що містить послідовно з'єднані задавач, електронний регулятор, сервоклапан, гідравлічний двигун та датчик зворотного зв'язку, який відрізняється тим, що у схему між електронним регулятором та об′єктом керування введено додатковий електронний корегуючий пристрій та після датчика зворотного зв'язку введено блок корекції показників датчика зворотного зв'язку.
Текст
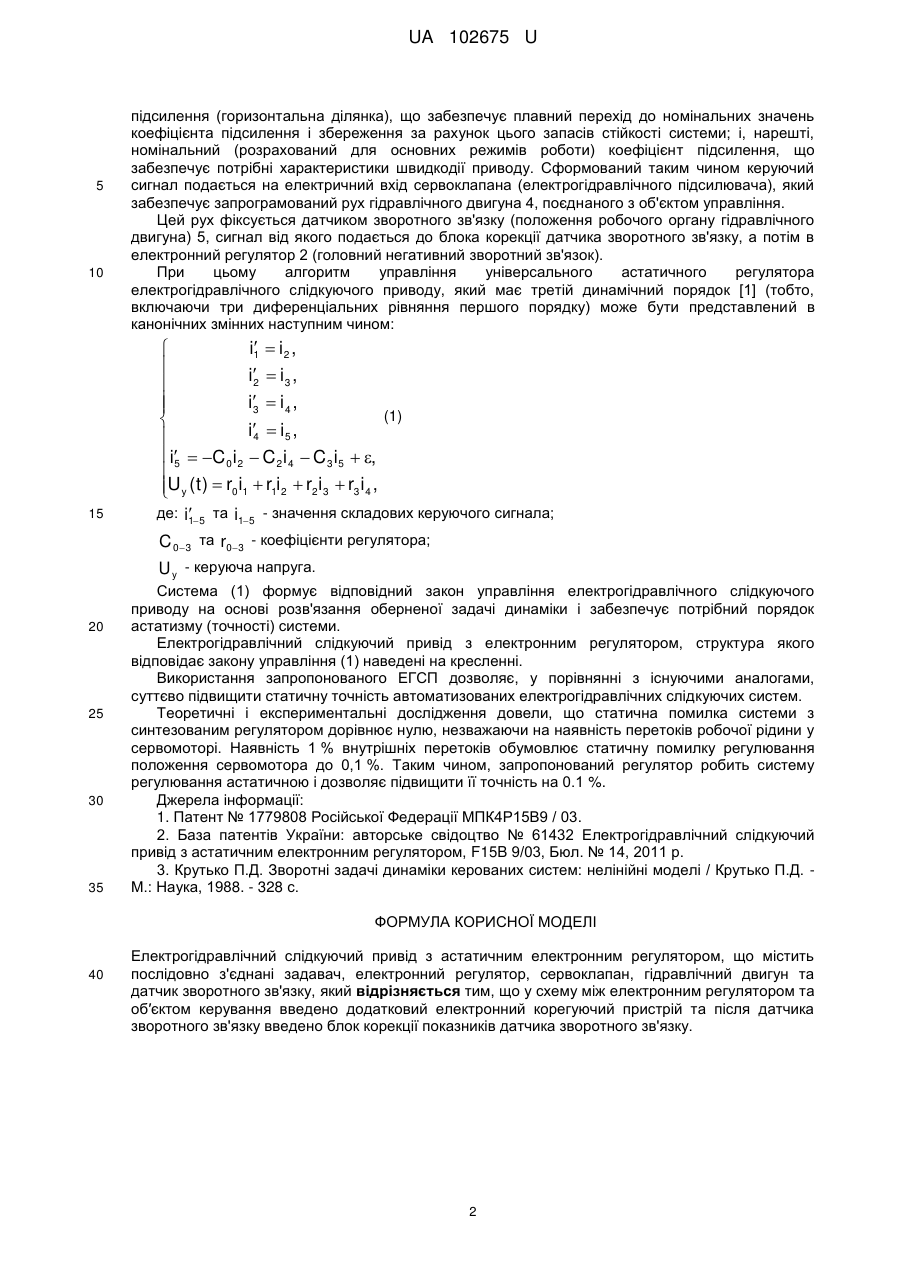
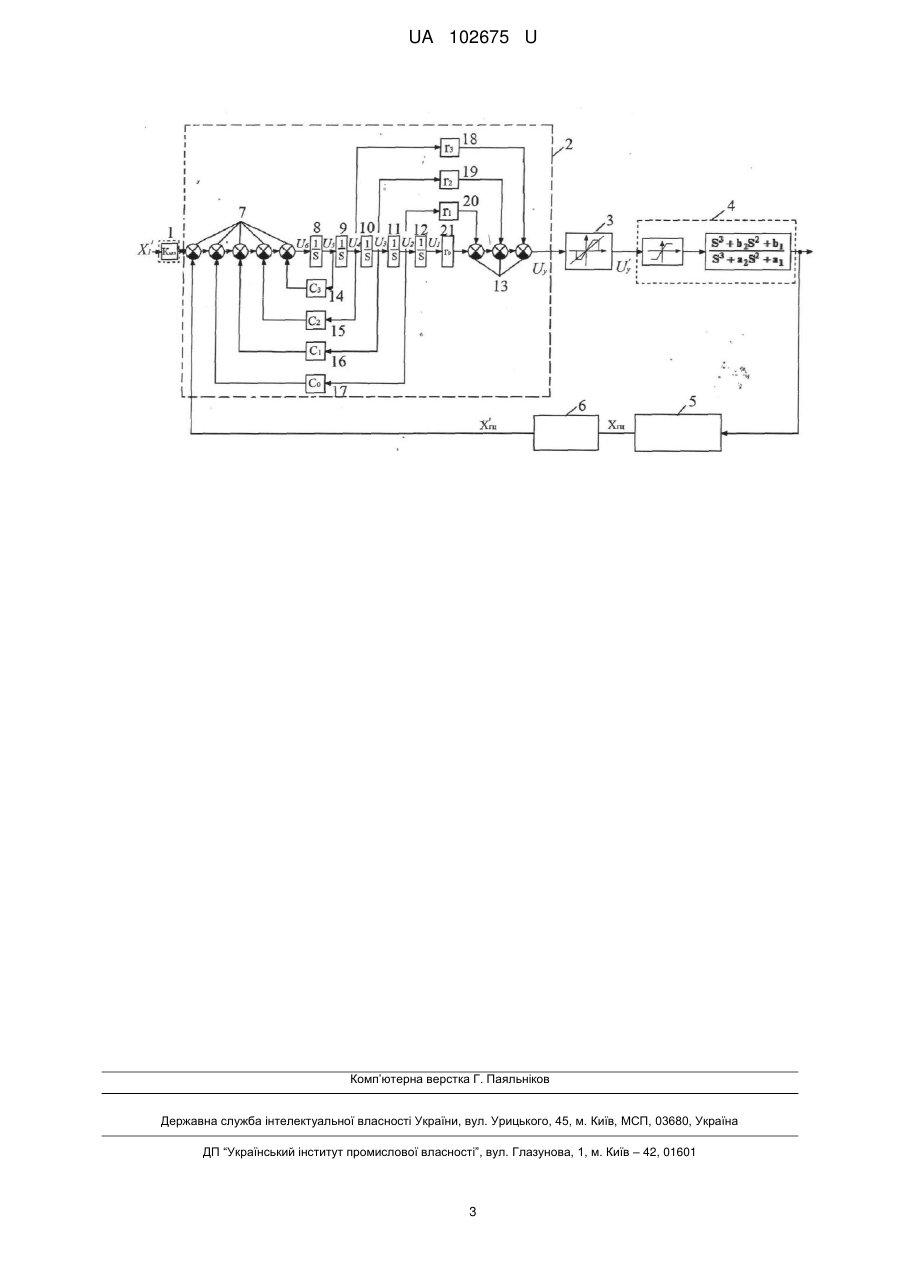
Реферат: Електрогідравлічний слідкуючий привід з астатичним електронним регулятором містить послідовно з'єднані задавач, електронний регулятор, сервоклапан, гідравлічний двигун та датчик зворотного зв'язку. У схему між електронним регулятором та об′єктом керування введено додатковий електронний корегуючий пристрій та після датчику зворотного зв'язку введено блок корекції показників датчика зворотного зв'язку. UA 102675 U (54) ЕЛЕКТРОГІДРАВЛІЧНИЙ СЛІДКУЮЧИЙ ПРИВІД З АСТАТИЧНИМ ЕЛЕКТРОННИМ РЕГУЛЯТОРОМ UA 102675 U UA 102675 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до сфери гідроавтоматики і може бути використана в машинах і механізмах, де необхідно точне регулювання положення робочого органу. У теперішній час в швидкодіючих прецизійних електрогідравлічних слідкуючих приводах (ЕГСП) використовуються електронні регулятори, побудовані на принципах модального керування за параметрами стану [1]. Такі регулятори забезпечують максимальну компенсацію динамічних похибок і, відповідно, високі характеристики швидкодії. Недоліком таких систем є те, що в них відсутня компенсація статичних похибок, обумовлених систематичними похибками датчиків зворотного зв'язку і статичними нелінійними характеристиками об'єктів керування (сухе тертя, нечутливість, люфти та ін.). Відомим є електрогідравлічний слідкуючий привід (ЕГСП) [2], що містить послідовно з'єднані задавач, електронний регулятор, сервоклапан і датчик зворотного зв'язку, введена структура електронного регулятора, яка включає послідовно з'єднані суматор з п'ятьма входами, п'ять інтеграторів, суматор з чотирма входами, а також вісім пропорційних елементів, за допомогою яких організовано чотири негативних зворотних зв'язків - від перших чотирьох інтеграторів на суматор з п'ятьма входами і чотири позитивних прямих зв'язків - від другого, третього, четвертого і п'ятого інтеграторів на суматор з чотирма входами. Але основними недоліками розглянутого електрогідравлічного слідкуючого приводу є похибки, обумовлені статичними нелінійними характеристиками та малий запас стійкості системи. Наведений регулятор не повністю компенсує статичні помилки, обумовлені внутрішніми і зовнішніми витоками, перетіканнями робочої рідини. Разом з тим відомо, що методи синтезу регуляторів, засновані на вирішенні зворотних задач динаміки об'єктів управління можуть забезпечити максимальну точність (у тому числі потрібний порядок астатизму) і швидкодію динамічних систем [3]. В основу корисної моделі поставлено задачу вдосконалення електрогідравлічного слідкуючого приводу, у якому введення нових конструктивних елементів та зв'язків забезпечить підвищення точності, швидкодії, надійності та зменшення системних похибок. Поставлена задача вирішується тим, що у відомому електрогідравлічному слідкуючому приводі, що містить послідовно з'єднані задавач, електронний регулятор, що містить послідовно з'єднані суматор з п'ятьма входами, п'ять інтеграторів, суматор з чотирма входами, а також вісім пропорційних елементів, за допомогою яких організовано чотири негативних зворотних зв'язків від перших чотирьох інтеграторів на суматор з п'ятьма входами і чотири позитивних прямих зв'язків - від другого, третього, четвертого і п'ятого інтеграторів на суматор з чотирма входами, блок задання змінного коефіцієнта посилення, а також блок корекції датчика зворотного зв'язку, сервоклапан та гідравлічний двигун, датчик зворотного зв'язку, введено у схему між електронним регулятором та об'єктом керування додатковий електронний корегуючий пристрій та після датчика зворотного зв'язку блок корекції показників датчика зворотного зв'язку. Це дає змогу істотно підвищити статичну точність, швидкодію і надійність автоматизованих електрогідравлічних слідкуючих систем, а також зменшити дороговизну електронних регуляторів. На кресленні зображена структурна схема електрогідравлічного слідкуючого приводу з астатичним електронним регулятором. Електрогідравлічний слідкуючий привід з астатичним електронним регулятором складається з послідовно з'єднаного задавача 1, електронного регулятора 2, блока надання змінного коефіцієнта посилення 3, сервоклапана та гідравлічного двигуна 4, датчика зворотного зв'язку 5 та блока корекції показників датчика зворотного зв'язку 6. Електронний регулятор 2 включає послідовно з'єднані суматор 7 з п'ятьма входами, п'ять інтеграторів (8, 9, 10, 11, 12), суматор 13 з чотирма входами, а також вісім пропорційних (масштабних елементів 14, 15, 16, 17, 18, 19, 20, 21) - за допомогою яких організовано чотири негативних зворотних зв'язків (масштабні елементи 14, 15, 16, 17) і чотири позитивні зв'язки (масштабні елементи 18,19, 20, 21). Запропонований електрогідравлічний слідкуючий привід працює таким чином: задана програма роботи, сформована у задавачі 1 у вигляді задавань послідовності електронних сигналів, проходить через електронний регулятор 2, де формується закон управління (1) на основі розв'язання оберненої задачі динаміки об'єкта управління. Сигнал надходить на додатковий електронний корегуючий пристрій, який забезпечить реалізацію змінного коефіцієнта підсилення контуру керування, а саме: високий (дво- та трикратний від номінального) коефіцієнт підсилення у діапазоні малих зміщень об'єкта від номінального положення з метою компенсації похибок, обумовлених статичними нелінійними характеристиками (нечутливість елементів, сухе тертя, люфти та ін.); нульовий коефіцієнт 1 UA 102675 U 5 10 15 20 25 30 35 підсилення (горизонтальна ділянка), що забезпечує плавний перехід до номінальних значень коефіцієнта підсилення і збереження за рахунок цього запасів стійкості системи; і, нарешті, номінальний (розрахований для основних режимів роботи) коефіцієнт підсилення, що забезпечує потрібні характеристики швидкодії приводу. Сформований таким чином керуючий сигнал подається на електричний вхід сервоклапана (електрогідравлічного підсилювача), який забезпечує запрограмований рух гідравлічного двигуна 4, поєднаного з об'єктом управління. Цей рух фіксується датчиком зворотного зв'язку (положення робочого органу гідравлічного двигуна) 5, сигнал від якого подається до блока корекції датчика зворотного зв'язку, а потім в електронний регулятор 2 (головний негативний зворотний зв'язок). При цьому алгоритм управління універсального астатичного регулятора електрогідравлічного слідкуючого приводу, який має третій динамічний порядок [1] (тобто, включаючи три диференціальних рівняння першого порядку) може бути представлений в канонічних змінних наступним чином: i i 2 , 1 i3 , i2 i i 4 , 3 (1) 4 i 5 , i i C 0 i 2 C 2 i 4 C 3 i 5 , 5 U у ( t ) r0 i1 r1i 2 r2 i 3 r3 i 4 , де: i 5 та i15 - значення складових керуючого сигнала; 1 C 03 та r03 - коефіцієнти регулятора; U у - керуюча напруга. Система (1) формує відповідний закон управління електрогідравлічного слідкуючого приводу на основі розв'язання оберненої задачі динаміки і забезпечує потрібний порядок астатизму (точності) системи. Електрогідравлічний слідкуючий привід з електронним регулятором, структура якого відповідає закону управління (1) наведені на кресленні. Використання запропонованого ЕГСП дозволяє, у порівнянні з існуючими аналогами, суттєво підвищити статичну точність автоматизованих електрогідравлічних слідкуючих систем. Теоретичні і експериментальні дослідження довели, що статична помилка системи з синтезованим регулятором дорівнює нулю, незважаючи на наявність перетоків робочої рідини у сервомоторі. Наявність 1 % внутрішніх перетоків обумовлює статичну помилку регулювання положення сервомотора до 0,1 %. Таким чином, запропонований регулятор робить систему регулювання астатичною і дозволяє підвищити її точність на 0.1 %. Джерела інформації: 1. Патент № 1779808 Російської Федерації МПК4Р15В9 / 03. 2. База патентів України: авторське свідоцтво № 61432 Електрогідравлічний слідкуючий привід з астатичним електронним регулятором, F15B 9/03, Бюл. № 14, 2011 р. 3. Крутько П.Д. Зворотні задачі динаміки керованих систем: нелінійні моделі / Крутько П.Д. Μ.: Наука, 1988. - 328 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Електрогідравлічний слідкуючий привід з астатичним електронним регулятором, що містить послідовно з'єднані задавач, електронний регулятор, сервоклапан, гідравлічний двигун та датчик зворотного зв'язку, який відрізняється тим, що у схему між електронним регулятором та об′єктом керування введено додатковий електронний корегуючий пристрій та після датчика зворотного зв'язку введено блок корекції показників датчика зворотного зв'язку. 2 UA 102675 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюElectrohydraulic servo-actuator with astatic electronic controller
Автори англійськоюKaniuk Hennadii Ivanovych, Melnykov Viacheslav Evhenovych, Babenko Ihor Anatoliiovych, Kozlova Maryna Leonidivna
Назва патенту російськоюЭлектрогидравлический следящий привод с астатическим электронным регулятором
Автори російськоюКанюк Геннадий Иванович, Мельников Вячеслав Евгеньевич, Бабенко Игорь Анатольевич, Козлова Марина Леонидовна
МПК / Мітки
МПК: F15B 9/03
Мітки: астатичним, привід, регулятором, електронним, слідкуючий, електрогідравлічний
Код посилання
<a href="https://ua.patents.su/5-102675-elektrogidravlichnijj-slidkuyuchijj-privid-z-astatichnim-elektronnim-regulyatorom.html" target="_blank" rel="follow" title="База патентів України">Електрогідравлічний слідкуючий привід з астатичним електронним регулятором</a>
Електрогідравлічний слідкуючий привід з астатичним електронним регулятором
Номер патенту: 61432
Опубліковано: 25.07.2011
Автори: Артюх Станіслав Федорович, Близниченко Олена Миколаївна, Попов Максим Анатолійович, Канюк Геннадій Іванович
МПК: F15B 9/03
Мітки: слідкуючий, електронним, електрогідравлічний, привід, регулятором, астатичним
Формула / Реферат:
Електрогідравлічний слідкуючий привід з астатичним електронним регулятором, що включає послідовно з'єднані задавач, електронний регулятор, сервоклапан і датчик зворотного зв'язку, який відрізняється тим, що електронний регулятор включає послідовно з'єднані суматор з п'ятьма входами, п'ять інтеграторів, суматор з чотирма входами, а також вісім пропорційних елементів, за допомогою котрих організовано чотири негативних зворотних зв'язки - від...
Електрогідравлічний слідкуючий привід з автономним регулятором положення сервоклапана
Номер патенту: 61448
Опубліковано: 25.07.2011
Автори: Близниченко Олена Миколаївна, Попов Максим Анатолійович, Канюк Генадій Іванович, Артюх Станіслав Федорович
МПК: F15B 9/03
Мітки: електрогідравлічний, слідкуючий, автономним, положення, сервоклапана, привід, регулятором
Формула / Реферат:
Електрогідравлічний слідкуючий привід з автономним регулятором положення сервоклапана, який включає послідовно з'єднані задавальний блок, електронний регулятор основного контуру керування гідравлічним двигуном, сервоклапан і гідравлічний двигун, з'єднаний з об'єктом керування, який відрізняється тим, що введено додатковий електронний блок, що включає давач положення золотника, автономний регулятор керування сервоклапаном і суматор, який...
Електрогідравлічний слідкуючий привід
Номер патенту: 61431
Опубліковано: 25.07.2011
Автори: Попов Максим Анатолійович, Близниченко Олена Миколаївна, Канюк Геннадій Іванович, Артюх Станіслав Федорович
МПК: F15B 9/03
Мітки: слідкуючий, електрогідравлічний, привід
Формула / Реферат:
Електрогідравлічний слідкуючий привід, що включає послідовно з'єднані задавальний блок, суматор, електронний підсилювач, електрогідравлічний підсилювач, підключений до виконавчого гідравлічного механізму, датчик положення останнього, ланцюг негативного зворотного зв'язку з паралельно підключеними інтегратором і блоком корекції систематичних похибок давача, який відрізняється тим, що введено додатковий електронний корегуючий пристрій, який...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Таран Олександр Миколайович, Фірсов Сергій Миколайович, Лученко Олег Олексійович, Нарожний Віталій Васильович, Кулік Анатолій Степанович
МПК: F15B 9/00
Мітки: електрогідравлічний, слідкуючий, привід
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Слідкуючий електрогідравлічний привід
Номер патенту: 69128
Опубліковано: 16.08.2004
Автори: Нарожний Віталій Васильович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Гісцова Тетяна Іванівна, Лученко Олег Олексійович
МПК: F15B 9/00
Мітки: електрогідравлічний, привід, слідкуючий
Формула / Реферат:
Слідкуючий електрогідравлічний привід, що складається з гідравлічно з'єднаних реверсивно регульованого насоса і виконавчого гідроциліндра з датчиком положення його штока, підключеним через суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака і клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика сили споживаного струму і обмежника-формувача, який...
Попередній патент: Спосіб виробництва майонезу з використанням ультрафільтраційного концентрату молока
Наступний патент: Мобільна суміщена інформаційно-вимірювальна система
Випадковий патент: Район машини безперервного лиття заготівок