Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103674
Опубліковано: 25.12.2015
Автори: Орлов Сергій Володимирович, Коломійцев Олексій Володимирович, Салій Анатолій Григорович, Сачук Ігор Іванович, Сидоров Валентин Владиславович, Поліщук Василь Володимирович, Носик Андрій Михайлович, Рондін Юрій Петрович, Наконечний Олександр Анатолійович, Пєвцов Геннадій Володимирович
Формула / Реферат
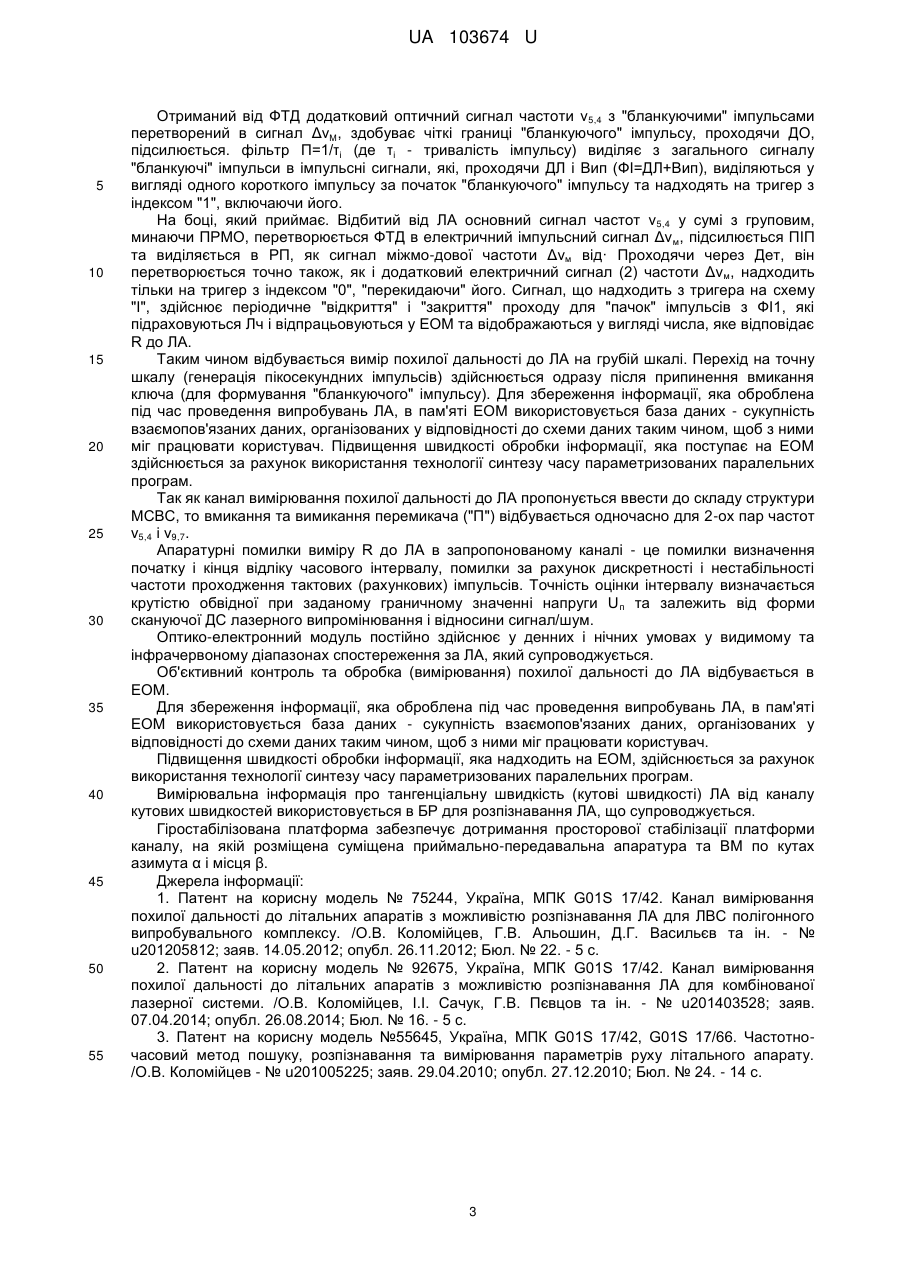
Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Δνм, блок дефлекторів, перемикач для частот міжмодових биттів Δνм і 2Δνм, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектори, широкосмуговий підсилювач, резонансні підсилювачі, налаштовані на відповідні частоти міжмодових биттів, формувач імпульсів, схему I, фільтр із заданою смугою пропускання, диференційований ланцюжок, випрямляч, тригер, детектор, диференційовану оптику, підсилювач, фільтр, лічильник, електронну обчислювальну машину, блок розпізнавання та б - введення сигналу від каналу вимірювання тангенціальної швидкості (кутових швидкостей) літального апарата, який відрізняється тим, що додатково введено гіростабілізовану платформу.
Текст
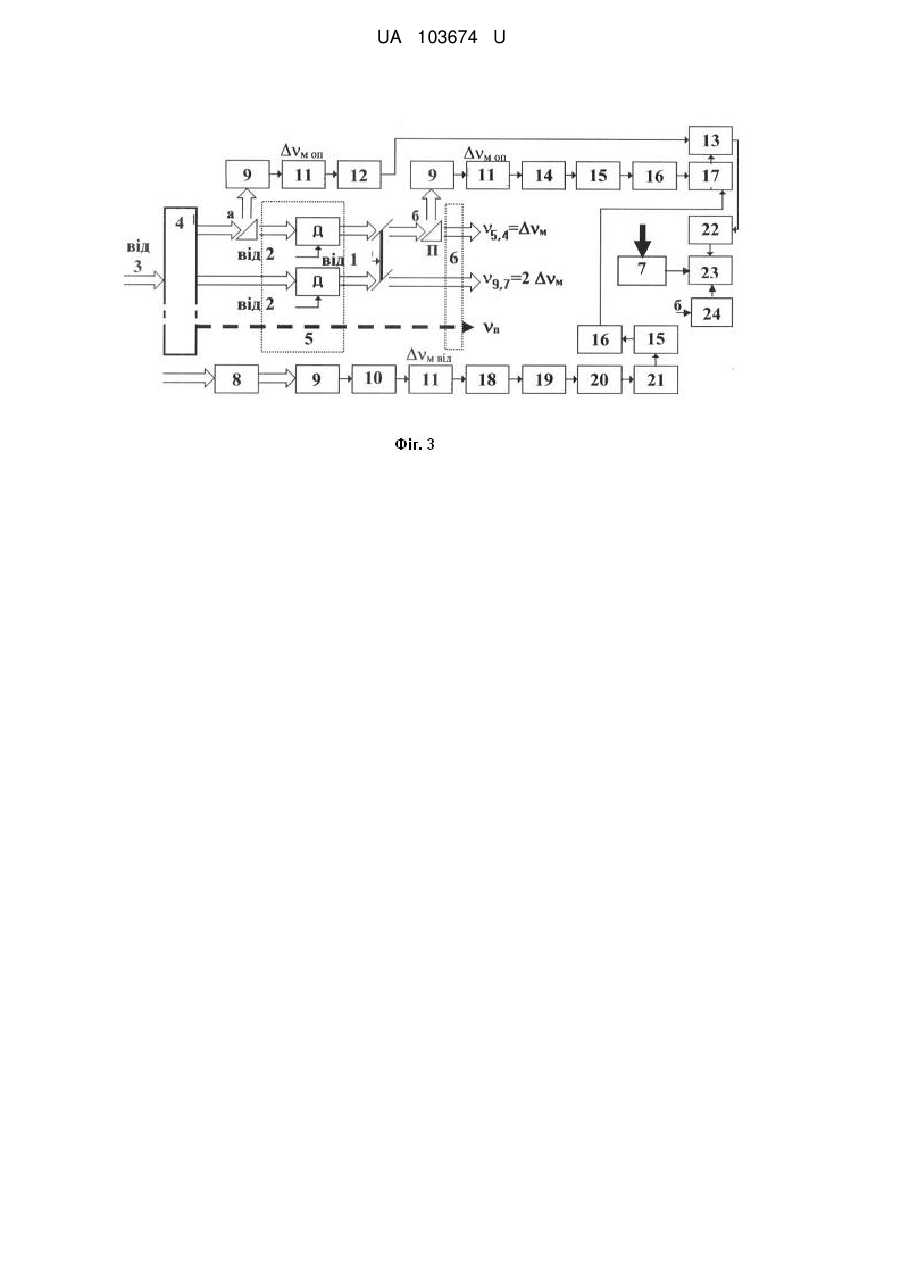
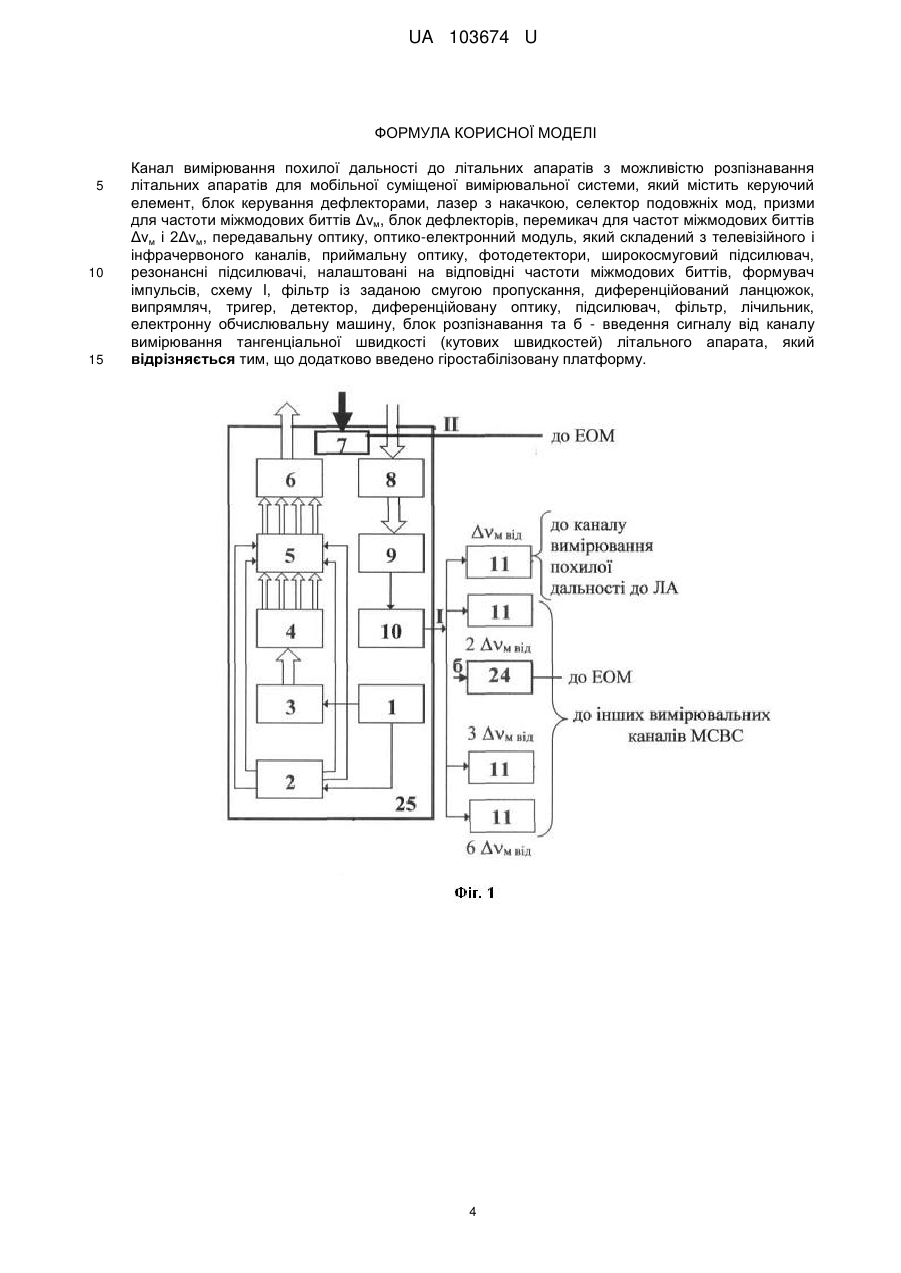
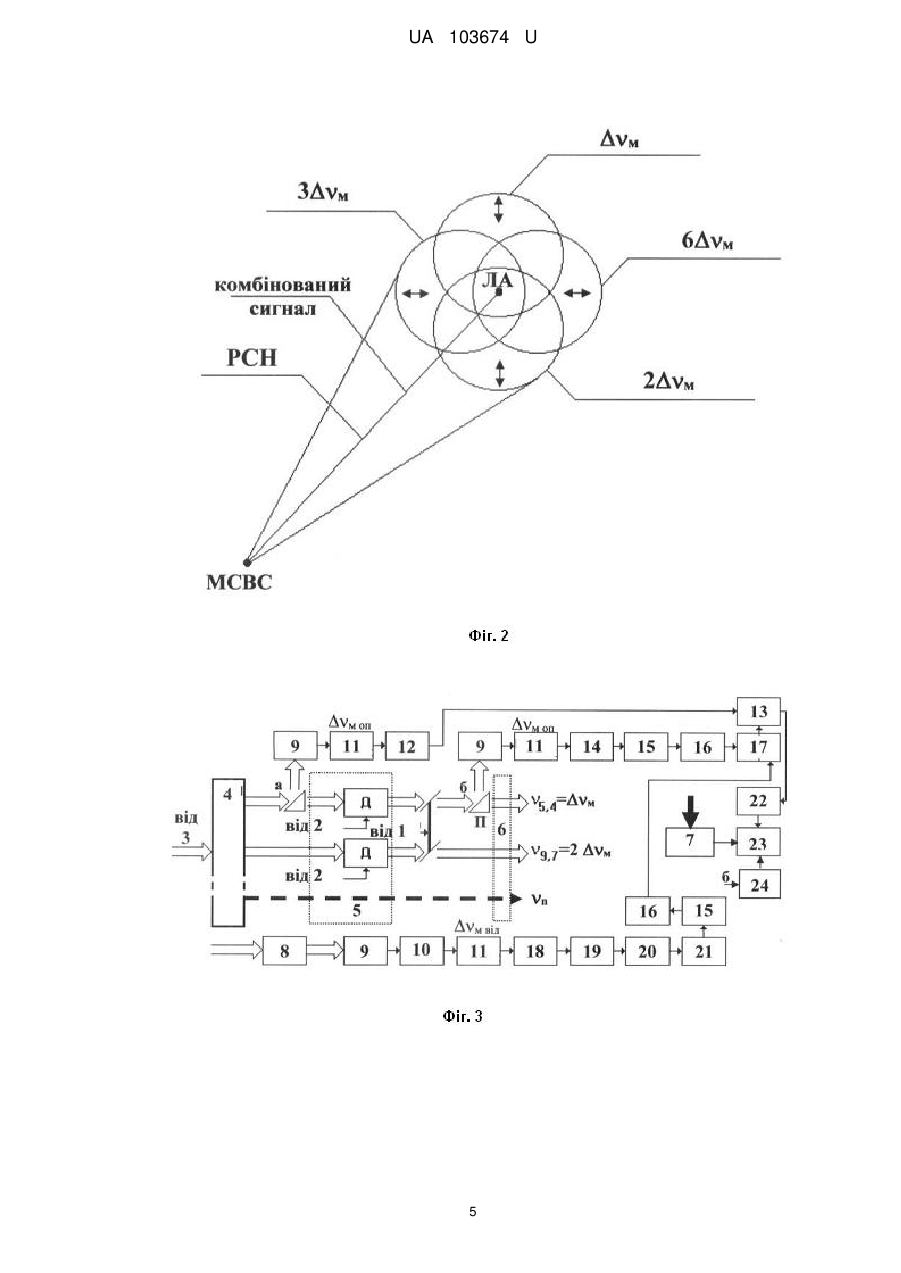
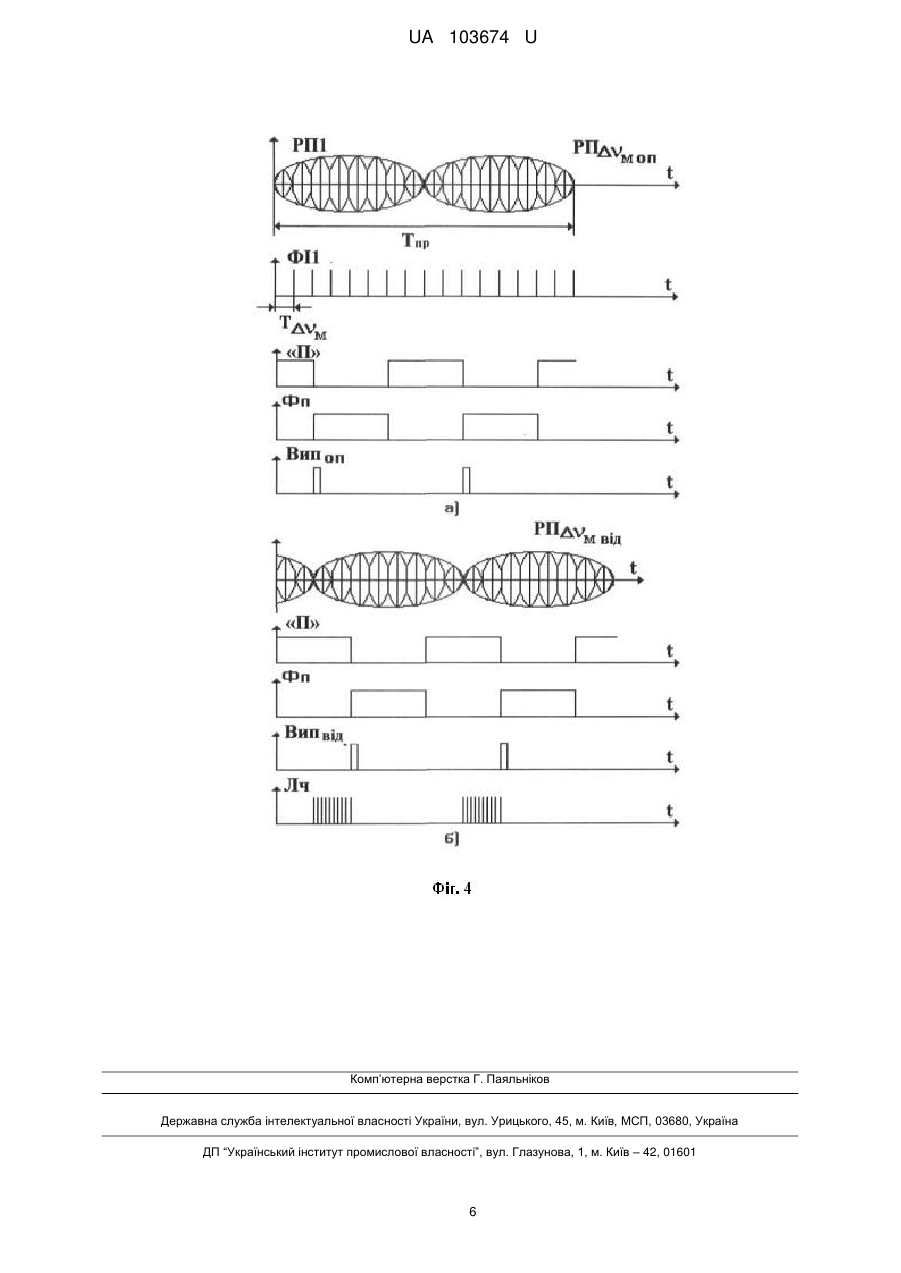
Реферат: Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для мобільної суміщеної вимірювальної системи містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Δνм, блок дефлекторів, перемикач для частот міжмодових биттів Δνм і 2Δνм, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектори, широкосмуговий підсилювач, резонансні підсилювачі, налаштовані на відповідні частоти міжмодових биттів, формувач імпульсів, схему I, фільтр із заданою смугою пропускання, диференційований ланцюжок, випрямляч, тригер, детектор, диференційовану оптику, підсилювач, фільтр, лічильник, електронну обчислювальну машину, блок розпізнавання та б - введення сигналу від каналу вимірювання тангенціальної швидкості (кутових швидкостей) літального апарата. Додатково введено гіростабілізовану платформу. UA 103674 U (12) UA 103674 U UA 103674 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до галузі електрозв'язку і може бути використана для побудови передавальної частки мобільної суміщеної вимірювальної системи (МСВС). Відомий "Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для ЛВС полігонного випробувального комплексу" [1], який містить керуючий елемент (КЕ), блок керування дефлекторами (БКД), лазер з накачкою (Лн), селектор подовжніх мод (СПМ), призми для частоти міжмодових биттів Δνм, блок дефлекторів (БД), перемикач для частот міжмодових биттів Δνм і 2Δνм ("Π"), передавальну оптику (ПРДО), приймальну оптику (ПРМО), фотодетектори (ФТД), широкосмуговий підсилювач (ШП), резонансні підсилювачі (РП), настроєні на відповідні частоти міжмодових биттів, формувач імпульсів (ФІ), тригер ("1"|"0"), схему І, лічильник (Лч), фільтр із заданою смугою пропускання (Фп), детектор (Д), диференційовану оптику (ДО), підсилювач (П), фільтр (Ф), диференційовані ланцюжки (ДЛ), випрямлячі (Вип), електронну обчислювальну машину (ЕОМ), блок розпізнавання (БР) та б введення сигналу від каналу вимірювання тангенціальної швидкості (кутових швидкостей) літального апарата (ЛА). Недоліком відомого каналу є те, що він не здійснює об'єктивний контроль у денних і нічних умовах під час проведення випробувань ЛА. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип є "Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для комбінованої лазерної системи" [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Δνм, блок дефлекторів, перемикач для частот міжмодових биттів Δνм і 2Δνм, передавальну оптику, оптико-електронний модуль (OEM), який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектори, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, схему I, фільтр із заданою смугою пропускання, диференційований ланцюжок, випрямляч, тригер, детектор, диференційовану оптику, підсилювач, фільтр, лічильник та електронну обчислювальну машину, блок розпізнавання та б - введення сигналу від каналу вимірювання тангенціальної швидкості (кутових швидкостей) ЛА. Недоліком каналу-прототипу є те, що він не забезпечує дотримання просторової стабілізації платформи, на якій розміщується суміщена приймально-передавальна апаратура та виконавчі механізми (ВМ) по кутах азимута α і місця β. В основу корисної моделі поставлена задача створити канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для мобільної суміщеної вимірювальної системи, який дозволить здійснювати високоточне вимірювання похилої дальності до ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, об'єктивний контроль, розширення функціональних можливостей під час проведення випробувань ЛА у нічний час, збереження інформації, яка оброблена під час проведення випробувань ЛА, дотримання просторової стабілізації платформи, на якій розміщуються суміщена приймальнопередавальна апаратура і ВМ по кутах азимута α і місця β та, в разі необхідності, його розпізнавання. Поставлена задача вирішується за рахунок того, що у канал-прототип, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Δνм, блок дефлекторів, перемикач для частот міжмодових биттів Δνм і 2Δνм, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектори, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів, схему I, фільтр із заданою смугою пропускання, диференційований ланцюжок, випрямляч, тригер, детектор, диференційовану оптику, підсилювач, фільтр, лічильник та електронну обчислювальну машину, блок розпізнавання та б введення сигналу від каналу вимірювання тангенціальної швидкості (кутових швидкостей) ЛА, додатково введено гіростабілізовану платформу (ГСП). Побудова каналу вимірювання похилої дальності до ЛА з можливістю розпізнавання ЛА для мобільної суміщеної вимірювальної системи пов'язана з використанням одномодового богаточастотного з синхронізацією подовжніх мод випромінювання єдиного лазера-передавача, частотно-часового методу (ЧЧМ) [3] та OEM. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у високоточному вимірюванні похилої дальності до ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, здійсненні об'єктивного контролю у денних і нічних умовах, збереженні інформації, яка оброблена під час проведення випробувань ЛА, 1 UA 103674 U 5 10 15 20 25 30 35 40 45 50 55 60 забезпеченні просторової стабілізації платформи, на якій розмішуються суміщена приймальнопередавальна апаратура і виконавчі механізми та, в разі необхідності, його розпізнаванні. На фіг. 1 приведено передавальний бік узагальненої структурної схеми запропонованого каналу, де: б - введення сигналу від каналу вимірювання тангенціальної складової швидкості (кутових швидкостей) ЛА, І - вимірювальний сигнал; II - комбінований сигнал у видимому і інфрачервоному діапазонах. На фіг. 2 приведено створення рівносигнального напрямку (РСН) та сканування 4-мя діаграмами спрямованості (ДС) лазерного випромінювання в ортогональних площинах. На фіг. 3 приведена узагальнена структурна схема запропонованого каналу. На фіг. 4 приведені епюри напруг з виходів блоків вимірювання похилої дальності до ЛА, де: а) від блока опорного лазерного сигналу; б) від блока відбитого лазерного сигналу. Запропонований канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для мобільної суміщеної вимірювальної системи містить керуючий елемент 1, блок керування дефлекторами 2, лазер з накачкою 3, селектор подовжніх мод 4, призми для частоти міжмодових биттів Δνм, блок дефлекторів 5, перемикач для частот міжмодових биттів Δνм і 2Δνм, передавальну оптику 6, оптико-електронний модуль 7, який складений з телевізійного і інфрачервоного каналів, приймальну оптику 8, фото-детектори 9, широкосмуговий підсилювач 10, резонансні підсилювачі 11, настроєні на відповідні частоти міжмодових биттів, формувач імпульсів 12, схему I 13, фільтр із заданою смугою пропускання 14, диференційований ланцюжок 15, випрямляч 16, тригер 17, детектор 18, диференційовану оптику 19, підсилювач 20, фільтр 21, лічильник 22 та електронну обчислювальну машину 23, блок розпізнавання 24, гіростабілізіровану платформу 25 та б - введення сигналу від каналу вимірювання тангенціальної швидкості (кутових швидкостей) ЛА. Робота запропонованого каналу вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для мобільної суміщеної вимірювальної системи полягає у наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання лазера (Лн) за допомогою СПМ виділяються необхідні пари частот для створення рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки частково перетинаючихся 4-х парціальних ДС, за умови використання комбінацій подовжніх мод ("підфарбованих" різницевими частотами міжмодових биттів): Δv54=v5-v4=Δνм, Δv97=v9-v7=2Δνм, Δv63=v6-v3=3Δνм, Δv82=v8-v2=6Δνм. Сигнал частот міжмодових биттів Δνм, 2Δνм, 3Δνм та 6Δνм потрапляє на БД, який створений з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують БД у кожній з двох ортогональних площин (фіг. 1, 2). Період сканування задається БКД, який разом з Лн живляться від ICE. Проходячи через ПРДО, груповий лазерний імпульсний сигнал пар частот v 5,v4=Δνм, v9,v7=2Δνм, v6,v3=3Δνм та v8,v2=6Δνм фокусується в скануєми точки простору, оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у кожній з двох ортогональних площин α і β або X і У, при цьому формується РСН (фіг. 2). Прийняті ПРМО від ЛА лазерні імпульсні сигнали і огинаючи сигнали ДС лазерного випромінювання, відбиті в процесі сканування чотирьох ДС, за допомогою фотодетектора перетворюються в електричні імпульсні сигнали на несучих частотах і різницевих частотах міжмодових биттів. Підсилені ШП вони розподіляються по РП, що настроєні на відповідні частоти міжродових биттів Δvм від, 2Δvм від, 3Δvм від, 6Δvм від. При цьому імпульсні сигнали радіочастоти, що надходять з РП 1 (РП Δv м від) формують сигнал про похилу дальність до ЛА, а РП 2 (РП 2Δvм від), РП 3 (РП 3Δvм від) і РП 4 (РП 6Δvм від) формують сигнали для інших вимірювальних каналів МСВС (фіг. 1). Принцип роботи грубої шкали каналу вимірювання похилої дальності R до ЛА полягає у наступному (фіг. 3, 4). На боці, який передає, виділена СПМ зі спектра випромінювання лазера-передавача перша пара частот v54 розщеплюється під дією розщеплювача (призми) на два оптичні сигнали: 1) основний - сканований БД під певним кутом (з часом Тпр, що задається від БКД), який проходить через перемикач (П) для виділення "бланкуючого" імпульсу (бланк - нуль) і розщеплювач, де відбувається виділення додаткового сигналу (2) та надходить на ПРДО і далі на ЛА; 2) додатковий (1) - перетворений ФТД в електричний імпульсний сигнал різницевої частоти міжмодового биття Δνм, надходить на ФІ1, де відбувається виділення "пачок" імпульсів, прийнятих схемою "І". 2 UA 103674 U 5 10 15 20 25 30 35 40 45 50 55 Отриманий від ФТД додатковий оптичний сигнал частоти v5,4 з "бланкуючими" імпульсами перетворений в сигнал ΔνΜ, здобуває чіткі границі "бланкуючого" імпульсу, проходячи ДО, підсилюється. фільтр П=1/τі (де τі - тривалість імпульсу) виділяє з загального сигналу "бланкуючі" імпульси в імпульсні сигнали, які, проходячи ДЛ і Вип (ФІ=ДЛ+Вип), виділяються у вигляді одного короткого імпульсу за початок "бланкуючого" імпульсу та надходять на тригер з індексом "1", включаючи його. На боці, який приймає. Відбитий від ЛА основний сигнал частот v 5,4 у сумі з груповим, минаючи ПРМО, перетворюється ФТД в електричний імпульсний сигнал Δν м, підсилюється ПІП та виділяється в РП, як сигнал міжмо-дової частоти Δνм від· Проходячи через Дет, він перетворюється точно також, як і додатковий електричний сигнал (2) частоти Δν м, надходить тільки на тригер з індексом "0", "перекидаючи" його. Сигнал, що надходить з тригера на схему "І", здійснює періодичне "відкриття" і "закриття" проходу для "пачок" імпульсів з ФІ1, які підраховуються Лч і відпрацьовуються у ЕОМ та відображаються у вигляді числа, яке відповідає R до ЛА. Таким чином відбувається вимір похилої дальності до ЛА на грубій шкалі. Перехід на точну шкалу (генерація пікосекундних імпульсів) здійснюється одразу після припинення вмикання ключа (для формування "бланкуючого" імпульсу). Для збереження інформації, яка оброблена під час проведення випробувань ЛА, в пам'яті ЕОМ використовується база даних - сукупність взаємопов'язаних даних, організованих у відповідності до схеми даних таким чином, щоб з ними міг працювати користувач. Підвищення швидкості обробки інформації, яка поступає на ЕОМ здійснюється за рахунок використання технології синтезу часу параметризованих паралельних програм. Так як канал вимірювання похилої дальності до ЛА пропонується ввести до складу структури МСВС, то вмикання та вимикання перемикача ("П") відбувається одночасно для 2-ох пар частот v5,4 і v9,7. Апаратурні помилки виміру R до ЛА в запропонованому каналі - це помилки визначення початку і кінця відліку часового інтервалу, помилки за рахунок дискретності і нестабільності частоти проходження тактових (рахункових) імпульсів. Точність оцінки інтервалу визначається крутістю обвідної при заданому граничному значенні напруги U п та залежить від форми скануючої ДС лазерного випромінювання і відносини сигнал/шум. Оптико-електронний модуль постійно здійснює у денних і нічних умовах у видимому та інфрачервоному діапазонах спостереження за ЛА, який супроводжується. Об'єктивний контроль та обробка (вимірювання) похилої дальності до ЛА відбувається в ЕОМ. Для збереження інформації, яка оброблена під час проведення випробувань ЛА, в пам'яті ЕОМ використовується база даних - сукупність взаємопов'язаних даних, організованих у відповідності до схеми даних таким чином, щоб з ними міг працювати користувач. Підвищення швидкості обробки інформації, яка надходить на ЕОМ, здійснюється за рахунок використання технології синтезу часу параметризованих паралельних програм. Вимірювальна інформація про тангенціальну швидкість (кутові швидкості) ЛА від каналу кутових швидкостей використовується в БР для розпізнавання ЛА, що супроводжується. Гіростабілізована платформа забезпечує дотримання просторової стабілізації платформи каналу, на якій розміщена суміщена приймально-передавальна апаратура та ВМ по кутах азимута α і місця β. Джерела інформації: 1. Патент на корисну модель № 75244, Україна, МПК G01S 17/42. Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для ЛВС полігонного випробувального комплексу. /О.В. Коломійцев, Г.В. Альошин, Д.Г. Васильєв та ін. - № u201205812; заяв. 14.05.2012; опубл. 26.11.2012; Бюл. № 22. - 5 с. 2. Патент на корисну модель № 92675, Україна, МПК G01S 17/42. Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для комбінованої лазерної системи. /О.В. Коломійцев, І.І. Сачук, Г.В. Пєвцов та ін. - № u201403528; заяв. 07.04.2014; опубл. 26.08.2014; Бюл. № 16. - 5 с. 3. Патент на корисну модель №55645, Україна, МПК G01S 17/42, G01S 17/66. Частотночасовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарату. /О.В. Коломійцев - № u201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. № 24. - 14 с. 3 UA 103674 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Δνм, блок дефлекторів, перемикач для частот міжмодових биттів Δνм і 2Δνм, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектори, широкосмуговий підсилювач, резонансні підсилювачі, налаштовані на відповідні частоти міжмодових биттів, формувач імпульсів, схему I, фільтр із заданою смугою пропускання, диференційований ланцюжок, випрямляч, тригер, детектор, диференційовану оптику, підсилювач, фільтр, лічильник, електронну обчислювальну машину, блок розпізнавання та б - введення сигналу від каналу вимірювання тангенціальної швидкості (кутових швидкостей) літального апарата, який відрізняється тим, що додатково введено гіростабілізовану платформу. 4 UA 103674 U 5 UA 103674 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюNakonechnyi Oleksandr Anatoliiovych
Автори російськоюНаконечный Александр Анатолиевич
МПК / Мітки
МПК: G01S 17/42
Мітки: системі, суміщеної, розпізнавання, апаратів, можливістю, похило, вимірювальної, літальних, канал, мобільної, дальності, вимірювання
Код посилання
<a href="https://ua.patents.su/8-103674-kanal-vimiryuvannya-pokhilo-dalnosti-do-litalnikh-aparativ-z-mozhlivistyu-rozpiznavannya-litalnikh-aparativ-dlya-mobilno-sumishheno-vimiryuvalno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи</a>
Канал вимірювання похилої дальності до літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 102350
Опубліковано: 26.10.2015
Автори: Павлій Владислав Олександрович, Коломійцев Олексій Володимирович, Руденко Дмитро Васильович, Носик Андрій Михайлович, Сачук Ігор Іванович, Орлов Сергій Володимирович, Поляков Андрій Валентинович, Третяк В'ячеслав Федорович, Батуринський Мирослав Павлович, Альошин Геннадій Васильович
МПК: G01S 17/66, G01S 11/04, G01S 17/42
Мітки: дальності, мобільної, суміщеної, канал, вимірювальної, вимірювання, похило, системі, апаратів, літальних
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Δnм, модифікований блок дефлекторів, перемикач для частот міжмодових биттів Δnм і 2Δnм, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного...
Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103673
Опубліковано: 25.12.2015
Автори: Сачук Ігор Іванович, Рондін Юрій Петрович, Пєвцов Геннадій Володимирович, Орлов Сергій Володимирович, Теребуха Іван Миколайович, Поліщук Василь Володимирович, Носик Андрій Михайлович, Салій Анатолій Григорович, Коломійцев Олексій Володимирович, Максимчук Денис Олександрович
МПК: G01S 17/42
Мітки: вимірювальної, літальних, швидкості, суміщеної, можливістю, вимірювання, радіальної, апаратів, мобільної, системі, канал, розпізнавання
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач,...
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103672
Опубліковано: 25.12.2015
Автори: Поліщук Василь Володимирович, Пєвцов Геннадій Володимирович, Сачук Ігор Іванович, Рондін Юрій Петрович, Коломійцев Олексій Володимирович, Сидоров Валентин Владиславович, Орлов Сергій Володимирович, Хісматулін Володимир Шайдуллович, Салій Анатолій Григорович, Носик Андрій Михайлович
МПК: G01S 17/42
Мітки: вимірювальної, апаратів, кутових, швидкостей, літальних, канал, мобільної, можливістю, розпізнавання, системі, вимірювання, суміщеної
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні...
Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ла для комбінованої лазерної системи
Номер патенту: 92675
Опубліковано: 26.08.2014
Автори: Корнієнко Анатолій Петрович, Батуринський Мирослав Павлович, Посохов Віталій Васильович, Пєвцов Геннадій Володимирович, Коломійцев Олексій Володимирович, Кожушко Ярослав Миколайович, Толстолузька Олена Геннадіївна, Клівець Сергій Іванович, Орлов Сергій Володимирович, Сачук Ігор Іванович
МПК: G01S 17/42
Мітки: апаратів, похило, розпізнавання, літальних, вимірювання, комбінованої, дальності, системі, можливістю, канал, лазерної
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнавання ЛА для комбінованої лазерної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, призми для частоти міжмодових биттів Dnм, блок дефлекторів, перемикач для частот міжмодових биттів Dnм і 2Dnм, передавальну оптику, приймальну оптику, фотодетектори, широкосмуговий підсилювач, резонансні підсилювачі,...
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103671
Опубліковано: 25.12.2015
Автори: Коломійцев Олексій Володимирович, Пєвцов Геннадій Володимирович, Орлов Сергій Володимирович, Щипанський Павло Володимирович, Сачук Ігор Іванович, Салій Анатолій Григорович, Рондін Юрій Петрович, Носик Андрій Михайлович, Поліщук Василь Володимирович, Опенько Павло Вікторович
МПК: G01S 17/42
Мітки: автоматичного, літальних, вимірювальної, розпізнавання, канал, можливістю, системі, апаратів, супроводження, суміщеної, напрямком, мобільної
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач,...
Попередній патент: Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи
Наступний патент: Спосіб багатоканального за часом енергетичного виявлення радіосигналів при апріорній невизначеності їх тривалості
Випадковий патент: Напій слабоалкогольний