Спосіб визначення рівня обслуговування на регульованому перехресті

Формула / Реферат
Спосіб визначення рівня обслуговування на регульованому перехресті, що включає сканування зони впливу перехрестя з точки над його геометричним центром конусним видом лазерної розгортки одночасно двома оптичними променями, причому оптична вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а другий промінь формують у одній площині з першим, але зі зміщенням на півперіоді по колу розгортки, а оптичні осі обох променів, що формують вхідні і вихідні межі контрольованих зон, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину, що дозволяє визначити швидкість, тип і напрямки руху транспортних засобів по кожній смузі руху і їх затримки в одній з контрольованих зон з урахуванням часу їх проїзду кожним конкретним типом та затримки проїзду зони самого перехрестя як різниці між реальним часом проїзду цієї зони і середнім часом проїзду зони перехрестя кожним типом транспорту у заданому напрямку, при цьому загальну затримку транспортних засобів по кожній смузі руху за вибраний час виміру визначають як суму затримок транспортних засобів в контрольованій зоні та затримок цих транспортних засобів в зоні самого перехрестя, який відрізняється тим, що межі контрольованих зон, які формують другим лазерним променем, що відповідають початку і кінцю зони впливу перехрестя на швидкісний режим транспортних засобів, а затримки транспортних засобів за вибраний час виміру визначають як різницю часу проїзду усіх трьох контрольованих зон перехрестя у реальних умовах та умовах вільного руху по кожній смузі, для кожного типу транспортного засобу, з урахуванням напрямків руху, при цьому інтенсивність транспортних засобів, що повністю перетнули усі три зони перехрестя, визначають у приведених до легкового автомобіля одиницях, а середня затримка для всього перехрестя визначають як середню зважену на одну приведену одиницю, по якій і визначають рівень обслуговування на регульованому перехресті.
Текст
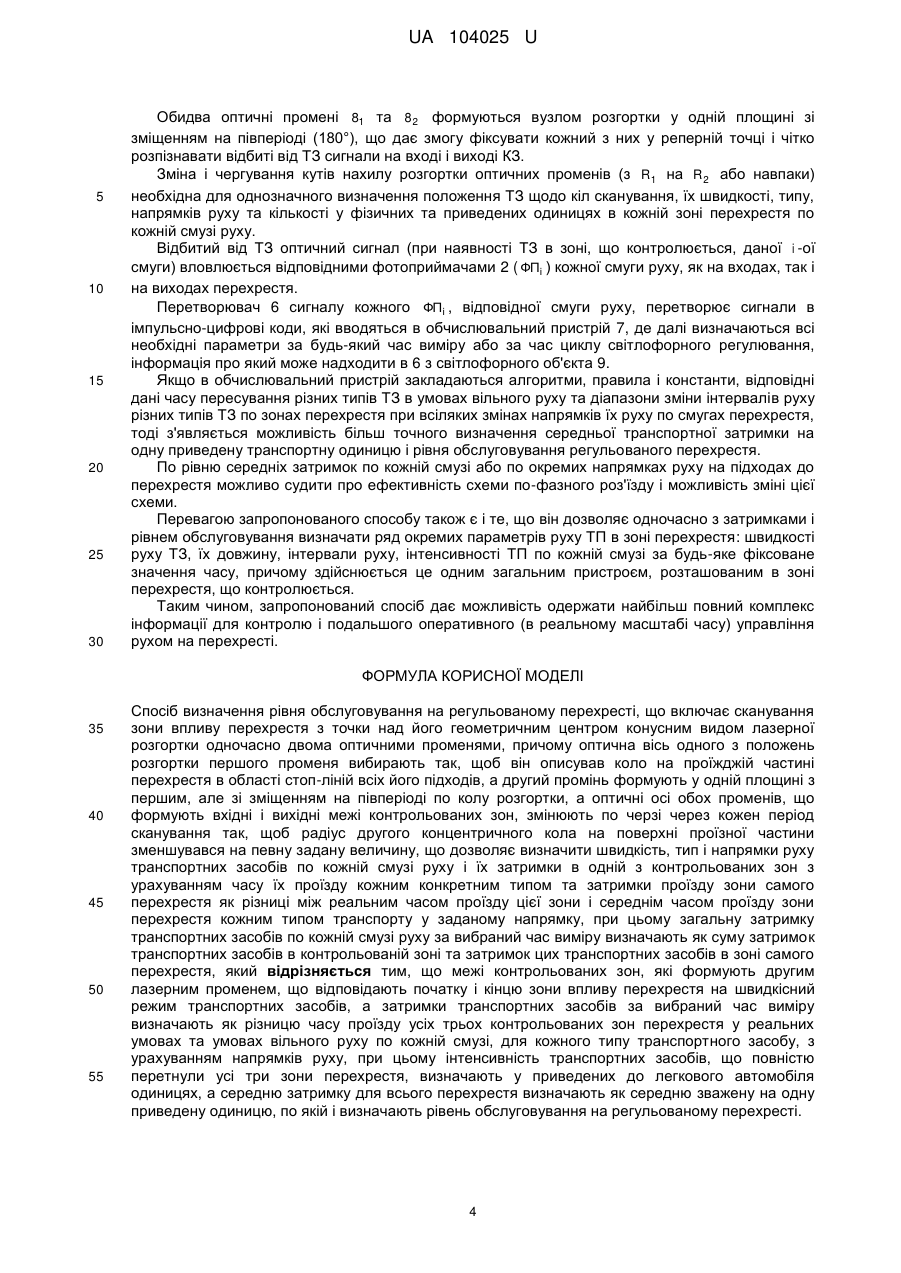
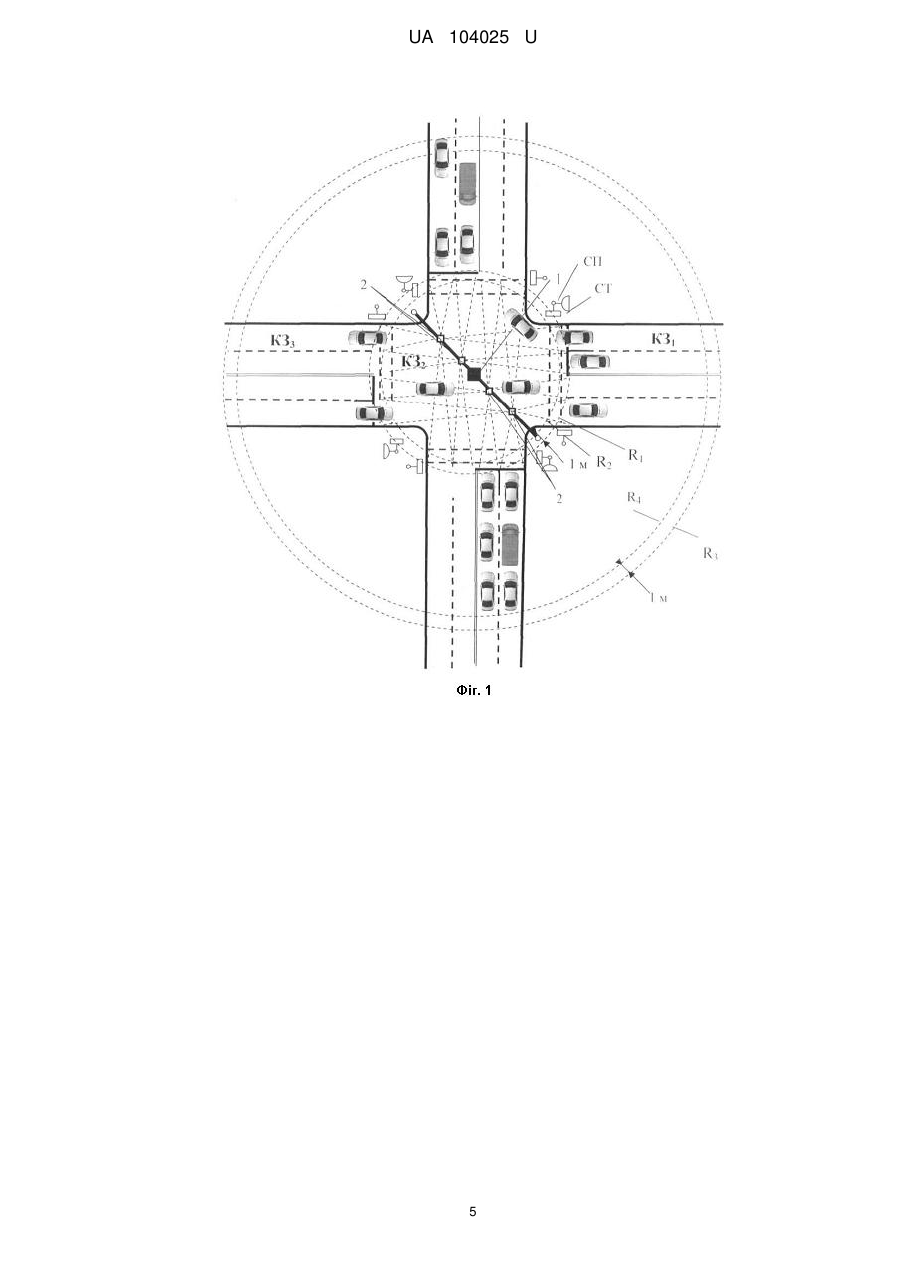
Реферат: Спосіб визначення рівня обслуговування на регульованому перехресті включає сканування зони впливу перехрестя з точки над його геометричним центром конусним видом лазерної розгортки одночасно двома оптичними променями. Оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів. Другий промінь формують у одній площині з першим, але зі зміщенням на півперіоду по колу розгортки. Оптичні осі обох променів, що формують вхідні і вихідні межі контрольованих зон, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину. Загальну затримку транспортних засобів по кожній смузі руху за вибраний час виміру визначають як суму затримок транспортних засобів в контрольованій зоні та затримок цих транспортних засобів в зоні самого перехрестя. Межі контрольованих зон, які формуються другим лазерним променем, відповідають початку і кінцю зони впливу перехрестя на швидкісний режим транспортних засобів. Затримки транспортних засобів за вибраний час виміру визначають як різницю часу проїзду усіх трьох контрольованих зон перехрестя у реальних умовах та умовах вільного руху по кожній смузі, для кожного типу транспортного засобу, з урахуванням напрямків руху. Інтенсивність транспортних засобів, що повністю перетнули усі три зони перехрестя, визначають у приведених до легкового автомобіля одиницях. Середню затримку для всього перехрести визначають як середню зважену на одну приведену одиницю, по якій і визначають рівень обслуговування на регульованому перехресті. UA 104025 U (54) СПОСІБ ВИЗНАЧЕННЯ РІВНЯ ОБСЛУГОВУВАННЯ НА РЕГУЛЬОВАНОМУ ПЕРЕХРЕСТІ UA 104025 U UA 104025 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем регулювання дорожнього руху (ДР) і може бути використана при розробці агрегатної системи засобів управління ДР, АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть ВДМ, а також для оцінки і підвищення ефективності управління рухом транспорту на регульованих перехрестях. Цей спосіб може бути використаний для одночасного визначення основних параметрів транспортних потоків (ТП): моменту проїзду транспортним засобом (ТЗ) контрольованої зони (КЗ) та перехрестя в цілому, швидкості, типу і напрямку руху ТЗ, їх інтенсивності руху по кожній смузі за будь-який проміжок часу, інтервалів рухів між ТЗ по кожній смузі, значення коефіцієнтів приведення до легкового автомобіля, середньої затримки ТЗ, а також рівня обслуговування (РО) на регульованому перехресті, як універсального критерію оцінки його ефективності функціонування. Відомий спосіб визначення транспортних затримок, на регульованому перехресті, згідно з яким здійснюється фіксація транспортних засобів, що в'їжджають в контрольовану зону, розташовану перед "Стоп-лінією" регульованого перехрестя, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначення поточної довжини черги ТЗ в контрольованій зоні, визначення сумарної за період вимірювання транспортної затримки шляхом періодичного з інтервалом часу підсумовування поточної довжини черги транспортних засобів в контрольованій зоні, визначення в кінці кожного періоду вимірювання середньої транспортної затримки, фіксацію в'їжджаючих в КЗ і виїжджаючих з неї ТЗ здійснюють по їх задніх бамперах, при цьому реальне число транспортних засобів в КЗ і сумарну транспортну затримку накопичують з високою частотою на кожному періоді сканування розгортаючого пристрою, при цьому середню транспортну затримку транспортних засобів по смузі і по перехрестю, в цілому, визначають по числу транспортних засобів, що реально виїхали з КЗ, та з урахуванням затримки проїзду кожним ТЗ зони самого перехрестя, як різницю між реальним та середнім часом проїзду зони перехрестя кожним типом ТЗ у заданому напрямку за період вимірювань, а вхідні і вихідні межі контрольованої зони формують шляхом сканування розгортаючим пристроєм лазерного променя інфрачервоного діапазону одночасно по всіх входах перехрестя, що дає можливість забезпечити визначення середньої затримки транспортних засобів по всіх смугах і на перехресті в цілому за будь-який час вимірювання затримки (Опис до патенту на корисну модель UA 84752 U від 25.10.2013 р., бюл. № 20/2013). Цей спосіб є найбільш близьким аналогом до способу, що запропоновано. Недоліком цього способу є низька точність визначення транспортних затримок на регульованому перехресті, оскільки він не враховує затримки проїзду ТЗ у зони впливу всього перехрестя, які виникають у випадках зниження швидкості ТЗ, або повної їх зупинки на сигнали світлофора та пішохідні потоки, що забороняють рух ТЗ по різних напрямках. Низька точність визначення транспортної затримки обумовлена також тим, що затримка проїзду ТЗ контрольованої зони береться по середньому часу приїзду і не враховує тип та габарити кожного ТЗ. Це, у свою чергу, не дозволяє визначити значення середньої затримки на один легковий автомобіль (приведену транспортну одиницю) на усьому перехресті, а також рівень його обслуговування, що суттєво знижує функціональні можливості відомого способу. В основу запропонованого способу поставлена задача, що полягає у підвищенні точності визначення транспортних затримок в зоні впливу всього регульованого перехрестя та розширення його функціональних можливостей для визначення рівня обслуговування, як інтегральної оцінки ефективності функціонування перехрестя. Поставлена задача вирішується тим, що згідно з корисною моделлю, проводять конусне покрокове сканування одночасно двома вузькоспрямованими лазерними променями інфрачервоного діапазону тимчасово всіх підходів і виходів перехрестя, що дає можливість сформувати вхідні і вихідні межі КЗ та забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. На Фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого способу і послідовність його дій. Відповідно до запропонованого способу розгортку лазерного променя здійснюють скануючим блоком 1, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя (R1) в області "стоп-ліній" всіх його підходів. До складу скануючого блока входить оптичний відхиляючий пристрій (дискретний сканістор), який забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R2) на поверхні проїзної частини зменшується на задану величину (наприклад, на 1 м). Таким чином, блок сканування на 1 UA 104025 U 5 10 15 20 25 30 35 40 кожному наступному періоді сканування змінює розгортку першого лазерного променя з одної оптичної осі на іншу та описує в зоні стоп-ліній на поверхні перехрестя два концентричні кола з різницею радіусів (R1-R2=1 м) та формує вихідну межу КЗ. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки (див. Фіг. 2) і формує вхідну межу КЗ. Цей промінь, як і перший, за допомогою відповідного дискретного сканістора 5 2на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R3 на проїжджій частині перехрестя) на іншу (з радіусом кола R4) і формує два концентричних кола з різницею радіусів R3-R4=1 м. Оптичні фотоприймачі 2 (ФПі) в процесі розгортки лазерного променя по одному з кіл на вході і виході КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. Фіксацію ТЗ, що в'їжджають в КЗ, здійснюють по їх передніх бамперах при пересіченні одного з кіл (наприклад R3), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з радіуса R3 на R4 і навпаки) визначається момент в'їзду, швидкість, довжина, тип, кількість і послідовність ТЗ, що реально в'їхали в КЗ по кожній смузі руху за період вимірювань. Радіус R3, що формує вхідну межу КЗ, вибирають за умови, що він відповідає початку зони реального впливу перехрестя на режими руху ТП на усіх підходах до перехрестя. Наявність подвійного сканування (R3, R4) на вході в КЗ дає можливість точно визначити момент в'їзду кожного ТЗ, його швидкість довжину, та тип, склад ТП та кількість ТЗ mi у черзі по кожній i-й смузі руху на підходах до перехрестя (в КЗ) в будь-який момент зміни сигналів світлофора або на момент початку руху перших у черзі ТЗ. Подвійне сканування першим променем (R1, R2) в зоні стоп-ліній (на виході з КЗ) дає змогу визначити точний час (момент виїзду), швидкість, довжину, тип, кількість і послідовність ТЗ, що реально виїхали з КЗ по кожній смузі руху за будь-який період вимірювань. За результатами сканування першим променем також визначають кількість та тип ТЗ по кожній смузі, що не встигли (не змогли) покинути зону самого перехрестя на зелений сигнал світлофора, тобто не здійснили перетинання зони сканування (R1, R2) по смугах руху на виході з перехрестя. Це можливо у випадку, коли лівоповоротні ТЗ в зоні перехрестя очікують проїзду прямого зустрічного транспорту, а правоповоротні ТЗ - завершення переходу пішоходів. Інформація про довжину, тип та час пересування ТЗ в зоні "стоп-ліній" дозволяє послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобіля КПРn як відношення величини середнього значення часового інтервалу t вп проїзду КЗ конкретним типом ТЗ до величини середнього значения часового інтервалу t лп проїзду цієї зони легковим автомобілем: КПРп t вп / t лп , (1) Це, у свою чергу, дозволяє також визначити картограму інтенсивностей руху ТЗ за невеликі періоди часу (цикл світлофорного регулювання) як інтенсивність руху по кожній і-й смузі у фізичних та у приведених одиницях: NПРі КПР1N1 КПР2N2 ... КПРпNп , (2) де NПРі - інтенсивності руху ТЗ у приведених до легкового автомобіля одиницях по і-й смузі руху; Nn - число транспортних засобів типу n у потоці; 45 50 KПРn ' коефіцієнт приведення ТЗ типу n до легкового автомобіля. Вимірювання такого комплексу параметрів в зоні "стоп-ліній" дає змогу подальшого визначення середньої затримки на один приведений ТЗ, що дозволить оцінити рівень обслуговування всього перехрестя. При загальному підході до визначення транспортної затримки розуміють вид затримки, що виникає в результаті зниження швидкості руху ТЗ в зоні впливу перехрестя і її залежність від сукупності багатьох чинників, пов'язаних з геометричними особливостями перерізу, вибраною смугою, напрямком руху і типом ТЗ, режимом регулювання, інтенсивністю прибуття ТЗ до даною регульованого перехрестя. Величина даної затримки tn визначається, як різниця в часі при ij порівнянні руху ТЗ по i -тій смузі у j -тому напрямку n -го типу через усі три зони (див. Фіг. 1) 55 даного регульованого перехрестя у реальних умовах gn . і того ж типу ТЗ на цьому ж напрямку і ij 2 UA 104025 U ділянці руху через дане регульоване перехрестя у вільних умовах qn . (без впливу дії ij світлофорного регулювання на ТП) tn gn qn . (3) ij ij ij 5 10 Три зони регульованого перехрестя (див. Фіг. 1) відповідають ділянкам руху ТЗ, що впливають на швидкісний режим ТП (КЗ1 - на підходах до перехрестя; КЗ2-зона самого перехрестя; КЗ3-КЗ на виходах з перехрестя). Подвійне сканування з високою частотою вхідних та вихідних меж кожної зони дозволяє точно фіксувати усі параметри руху ТЗ, їх напрямки руху по кожній смузі та можливість виміру часу руху gn та qn . окремо по кожній із трьох зон, як трьох складових ij ij gn gn (1) gn (2) gn (3) , (4) ij ij ij ij qn qn (1) qn (2) qn (3) . (5) ij ij ij ij 15 Реальний час проїзду усіх трьох зон кожним ТЗ фіксується по моментах перетинання їх задніми бамперами вказаних меж зон перехрестя, причому визначається він з високою точністю з дискретністю періоду сканування одночасно по всіх смугах на підходах та виходах перехрестя. Спочатку визначається загальна затримка кожного виду ТЗ, що рухаються по i -й смузі руху в різних напрямках за вибраний час виміру TB 3 T i k t N n n ij ij , (6) j 1 n 1 де k кількість типів ТЗ, що повністю проїхали усі три зони перехрестя з i -ї смуги руху за час виміру TB ; 20 Nn - число транспортних засобів типу n у потоці по i -тій смузі у j -тому напрямку, що за час ij виміру TB проїхали усі три зони перехрестя. А середня затримка t i на одну приведену одиницю для i -тої смуги руху за час виміру TB , або, наприклад, за кожний цикл світлофорного регулювання Tц визначається ti 25 Т і . (7) NПРі Потім за результатами виміру загальних затримок ТЗ по кожній смузі руху на усіх підходах до перехрестя визначають середню транспортну затримку tп на одну приведену одиницю для всього перехрестя: m T i i tп m 1 N , (8) ПРi i 1 де NПРі - інтенсивності руху ТЗ у приведених до легкового автомобіля одиницях по і -й смузі 30 35 40 45 руху за час виміру ТВ , m - число смуг руху на підходах до перехрестя. Далі згідно з нормативними показниками (Highway Capacity Manual.// TRB, Washington, DC, 2000. - 1134 p.) визначають рівень обслуговування регульованого перехрестя, як один з універсальних критеріїв оцінки його ефективності функціонування. Такий підхід виміру транспортної затримки прямим класичним методом, як різницю часу проїзду усіх трьох КЗ перехрестя у реальних умовах та умовах вільного руху по кожній смузі, для кожного типу ТЗ (з урахуванням напрямків руху) дозволяє суттєво підвищити точність визначення затримки (на відміну від усіх опосередкованих або розрахункових методів) та рівень обслуговування перехрестя. На Фіг. 2 представлена структурна схема пристрою, що розкриває основні відмінні риси запропонованого способу. Скануючий блок 1 має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують двопроменеве конусне покрокове сканування зони перехрестя за допомогою оптичного відхиляючого пристрою 5 (дискретного сканістора). Зміна положень кутів розгортки променів 81 та 8 2 здійснюється в реперній точці по черзі на кожному періоді сканування. 3 UA 104025 U 5 10 15 20 25 30 Обидва оптичні промені 81 та 8 2 формуються вузлом розгортки у одній площині зі зміщенням на півперіоді (180°), що дає змогу фіксувати кожний з них у реперній точці і чітко розпізнавати відбиті від ТЗ сигнали на вході і виході КЗ. Зміна і чергування кутів нахилу розгортки оптичних променів (з R1 на R 2 або навпаки) необхідна для однозначного визначення положення ТЗ щодо кіл сканування, їх швидкості, типу, напрямків руху та кількості у фізичних та приведених одиницях в кожній зоні перехрестя по кожній смузі руху. Відбитий від ТЗ оптичний сигнал (при наявності ТЗ в зоні, що контролюється, даної i -ої смуги) вловлюється відповідними фотоприймачами 2 ( ФПі ) кожної смуги руху, як на входах, так і на виходах перехрестя. Перетворювач 6 сигналу кожного ФПі , відповідної смуги руху, перетворює сигнали в імпульсно-цифрові коди, які вводяться в обчислювальний пристрій 7, де далі визначаються всі необхідні параметри за будь-який час виміру або за час циклу світлофорного регулювання, інформація про який може надходити в 6 з світлофорного об'єкта 9. Якщо в обчислювальний пристрій закладаються алгоритми, правила і константи, відповідні дані часу пересування різних типів ТЗ в умовах вільного руху та діапазони зміни інтервалів руху різних типів ТЗ по зонах перехрестя при всіляких змінах напрямків їх руху по смугах перехрестя, тоді з'являється можливість більш точного визначення середньої транспортної затримки на одну приведену транспортну одиницю і рівня обслуговування регульованого перехрестя. По рівню середніх затримок по кожній смузі або по окремих напрямках руху на підходах до перехрестя можливо судити про ефективність схеми по-фазного роз'їзду і можливість зміні цієї схеми. Перевагою запропонованого способу також є і те, що він дозволяє одночасно з затримками і рівнем обслуговування визначати ряд окремих параметрів руху ТП в зоні перехрестя: швидкості руху ТЗ, їх довжину, інтервали руху, інтенсивності ТП по кожній смузі за будь-яке фіксоване значення часу, причому здійснюється це одним загальним пристроєм, розташованим в зоні перехрестя, що контролюється. Таким чином, запропонований спосіб дає можливість одержати найбільш повний комплекс інформації для контролю і подальшого оперативного (в реальному масштабі часу) управління рухом на перехресті. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 55 Спосіб визначення рівня обслуговування на регульованому перехресті, що включає сканування зони впливу перехрестя з точки над його геометричним центром конусним видом лазерної розгортки одночасно двома оптичними променями, причому оптична вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а другий промінь формують у одній площині з першим, але зі зміщенням на півперіоді по колу розгортки, а оптичні осі обох променів, що формують вхідні і вихідні межі контрольованих зон, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину, що дозволяє визначити швидкість, тип і напрямки руху транспортних засобів по кожній смузі руху і їх затримки в одній з контрольованих зон з урахуванням часу їх проїзду кожним конкретним типом та затримки проїзду зони самого перехрестя як різниці між реальним часом проїзду цієї зони і середнім часом проїзду зони перехрестя кожним типом транспорту у заданому напрямку, при цьому загальну затримку транспортних засобів по кожній смузі руху за вибраний час виміру визначають як суму затримок транспортних засобів в контрольованій зоні та затримок цих транспортних засобів в зоні самого перехрестя, який відрізняється тим, що межі контрольованих зон, які формують другим лазерним променем, що відповідають початку і кінцю зони впливу перехрестя на швидкісний режим транспортних засобів, а затримки транспортних засобів за вибраний час виміру визначають як різницю часу проїзду усіх трьох контрольованих зон перехрестя у реальних умовах та умовах вільного руху по кожній смузі, для кожного типу транспортного засобу, з урахуванням напрямків руху, при цьому інтенсивність транспортних засобів, що повністю перетнули усі три зони перехрестя, визначають у приведених до легкового автомобіля одиницях, а середню затримку для всього перехрестя визначають як середню зважену на одну приведену одиницю, по якій і визначають рівень обслуговування на регульованому перехресті. 4 UA 104025 U 5 UA 104025 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/09
Мітки: регульованому, спосіб, рівня, перехресті, визначення, обслуговування
Код посилання
<a href="https://ua.patents.su/8-104025-sposib-viznachennya-rivnya-obslugovuvannya-na-regulovanomu-perekhresti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення рівня обслуговування на регульованому перехресті</a>
Спосіб визначення транспортних затримок на регульованому перехресті
Номер патенту: 84752
Опубліковано: 25.10.2013
Автор: Денисенко Олег Васильович
МПК: B60W 40/105, G08G 1/00
Мітки: транспортних, визначення, перехресті, регульованому, спосіб, затримок
Формула / Реферат:
Спосіб визначення транспортних затримок на регульованому перехресті, оснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної затримки в контрольованій зоні...
Спосіб визначення транспортних затримок на регульованому перехресті
Номер патенту: 109680
Опубліковано: 25.09.2015
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: спосіб, регульованому, визначення, перехресті, затримок, транспортних
Формула / Реферат:
Спосіб визначення транспортних затримок на регульованому перехресті, оснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної затримки в контрольованій зоні...
Спосіб визначення транспортних затримок на регульованому перехресті
Номер патенту: 77622
Опубліковано: 25.02.2013
Автори: Левтеров Андрій Іванович, Ярута Антон Миколайович, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: визначення, затримок, спосіб, транспортних, перехресті, регульованому
Формула / Реферат:
Спосіб визначення транспортних затримок на регульованому перехресті, заснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону, розташовану перед "Стоп-лінією" регульованого перехрестя, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної...
Спосіб визначення транспортних затримок на регульованому перехресті та пристрій для його здійснення
Номер патенту: 100660
Опубліковано: 10.01.2013
Автори: Денисенко Олег Васильович, Ярута Антон Миколайович, Левтеров Андрій Іванович
МПК: G08G 1/09
Мітки: затримок, транспортних, визначення, здійснення, спосіб, перехресті, регульованому, пристрій
Формула / Реферат:
1. Спосіб визначення транспортних затримок на регульованому перехресті, за яким фіксують транспортні засоби, що в'їжджають у контрольовану зону, розташовану перед лінією "Стоп" регульованого перехрестя, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначають поточну довжину черги транспортних засобів в контрольованій зоні, визначають сумарну за період вимірювання транспортну затримку...
Пристрій для визначення транспортних затримок на регульованому перехресті
Номер патенту: 108042
Опубліковано: 10.03.2015
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович
Мітки: перехресті, затримок, пристрій, транспортних, регульованому, визначення
Формула / Реферат:
Пристрій для визначення транспортних затримок на регульованому перехресті, що містить блок сканування лазерного променя інфрачервоного діапазону, перший і другий фотоприймачі, перший, другий і третій одновібратори, перший і другий елементи АБО, перший, другий, третій і четвертий формувачі імпульсів, реверсивний лічильник імпульсів, суматор, перший лічильник імпульсів і блок обчислення, причому перший формувач імпульсів сполучений з входом...
Попередній патент: Завантажувальний пристрій випалювальної конвеєрної машини
Наступний патент: Пристрій для збирання шламу з поверхні колових в плані флотаторів
Випадковий патент: Кульова опора для гасіння горизонтальних імпульсів