Квадратурний демодулятор
Номер патенту: 105963
Опубліковано: 10.07.2014
Автори: Таранчук Алла Анатоліївна, Підченко Сергій Костянтинович, Стецюк Віктор Іванович, Кальватинський Олександр Вікторович
Формула / Реферат
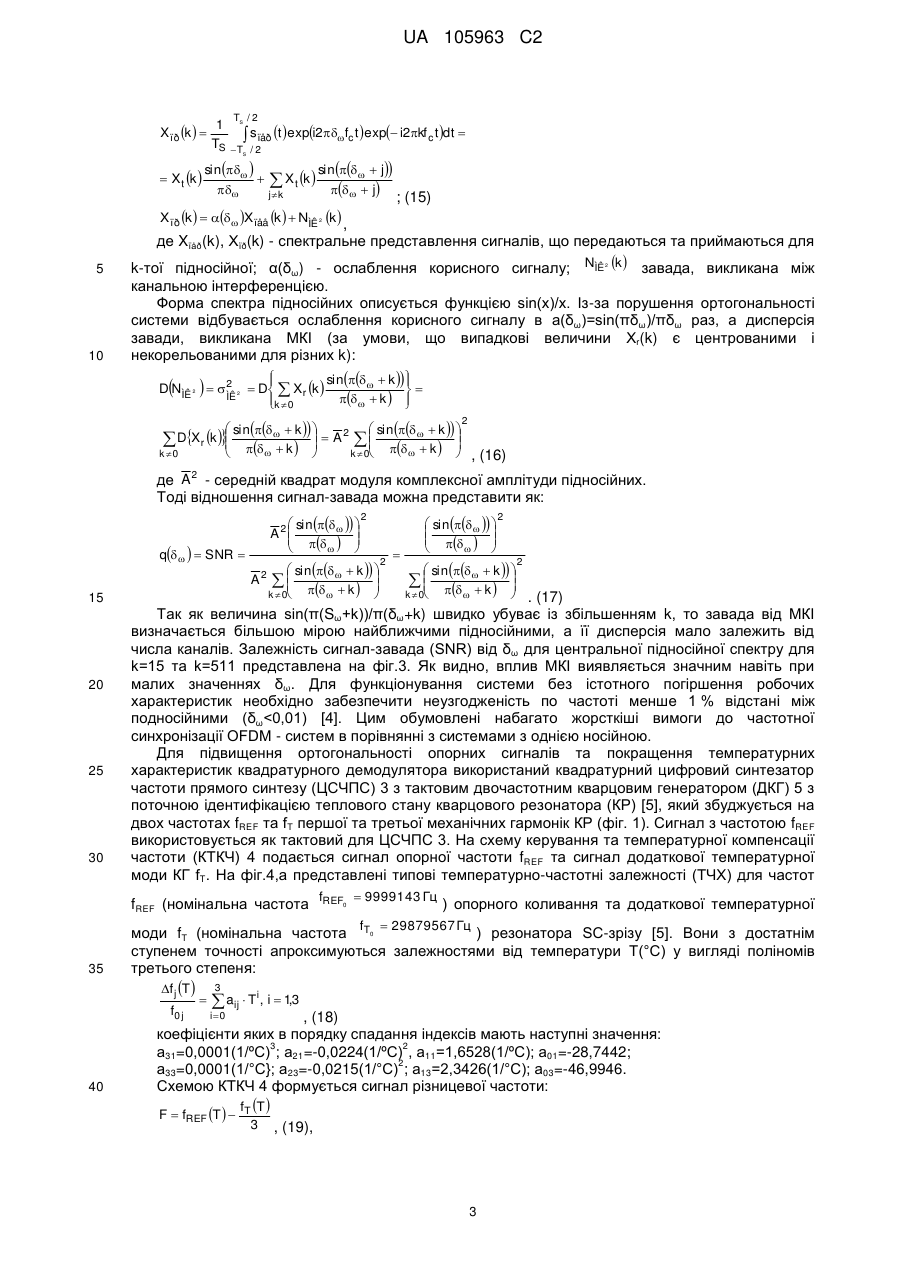
Квадратурний демодулятор, що містить синфазний та квадратурний канали, кожен з яких складається із послідовно з'єднаних змішувача радіочастоти та фільтра нижніх частот, причому перші входи змішувачів каналів з'єднані паралельно і утворюють вхід демодулятора, виходи фільтрів нижніх частот синфазного та квадратурного каналів підключені до відповідних входів суматора, а вихід суматора є виходом демодулятора, який відрізняється тим, що додатково введені генератор опорних сигналів, виконаний на основі двоканального цифрового синтезатора частоти прямого синтезу, синфазний S(t) та квадратурний S^(t), виходи якого підключені відповідно до других входів змішувачів синфазного та квадратурного каналів демодулятора, схема керування та температурної компенсації, вихід якої підключений до входу керування двоканального цифрового синтезатора частоти прямого синтезу, і двочастотний кварцовий генератор, причому першій вихід fREF двочастотного кварцового генератора підключений до тактових входів двоканального цифрового синтезатора частоти прямого синтезу і схеми керування та температурної компенсації, а другий вихід fT двочастотного кварцового генератора підключений до інформаційного входу схеми керування та температурної компенсації.
Текст
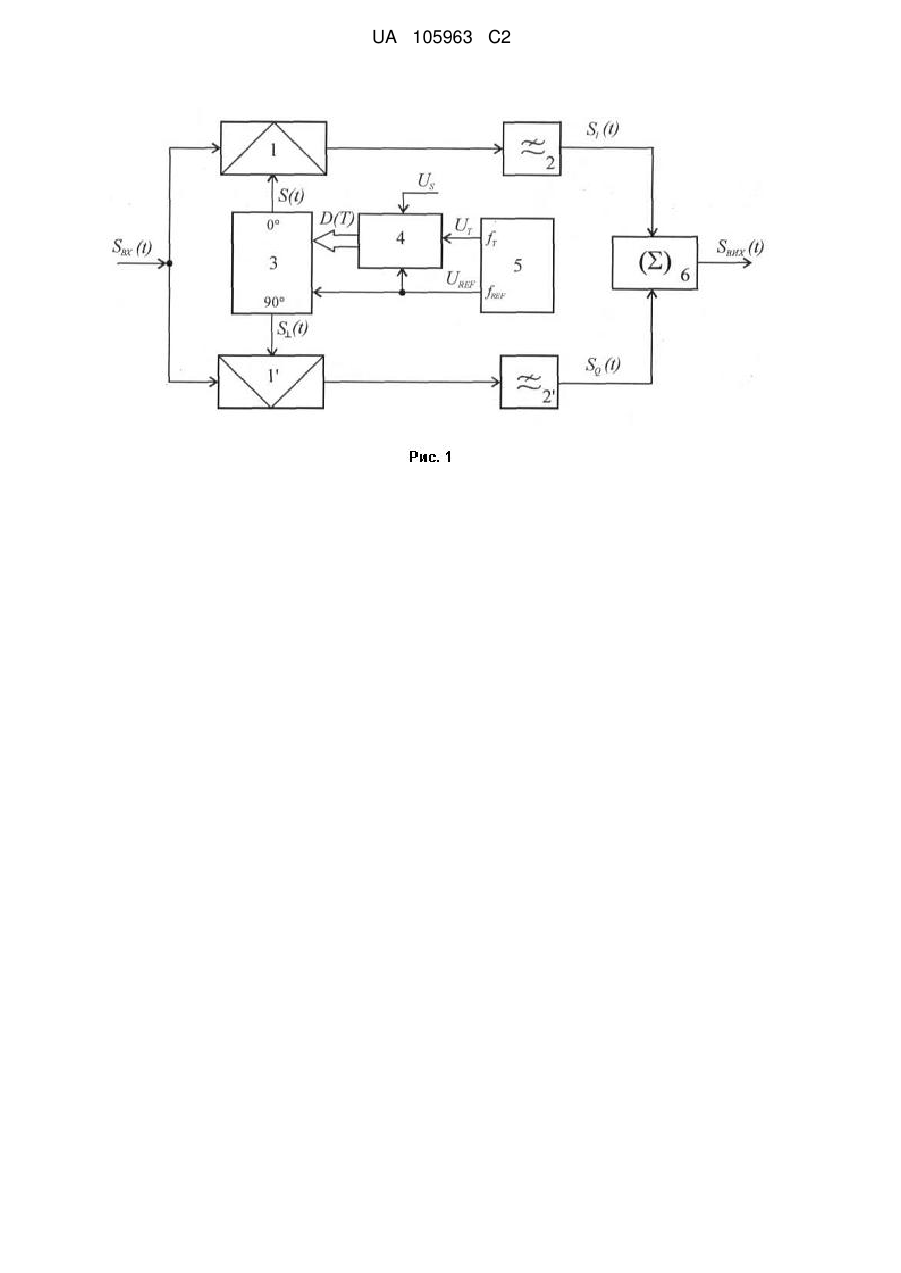
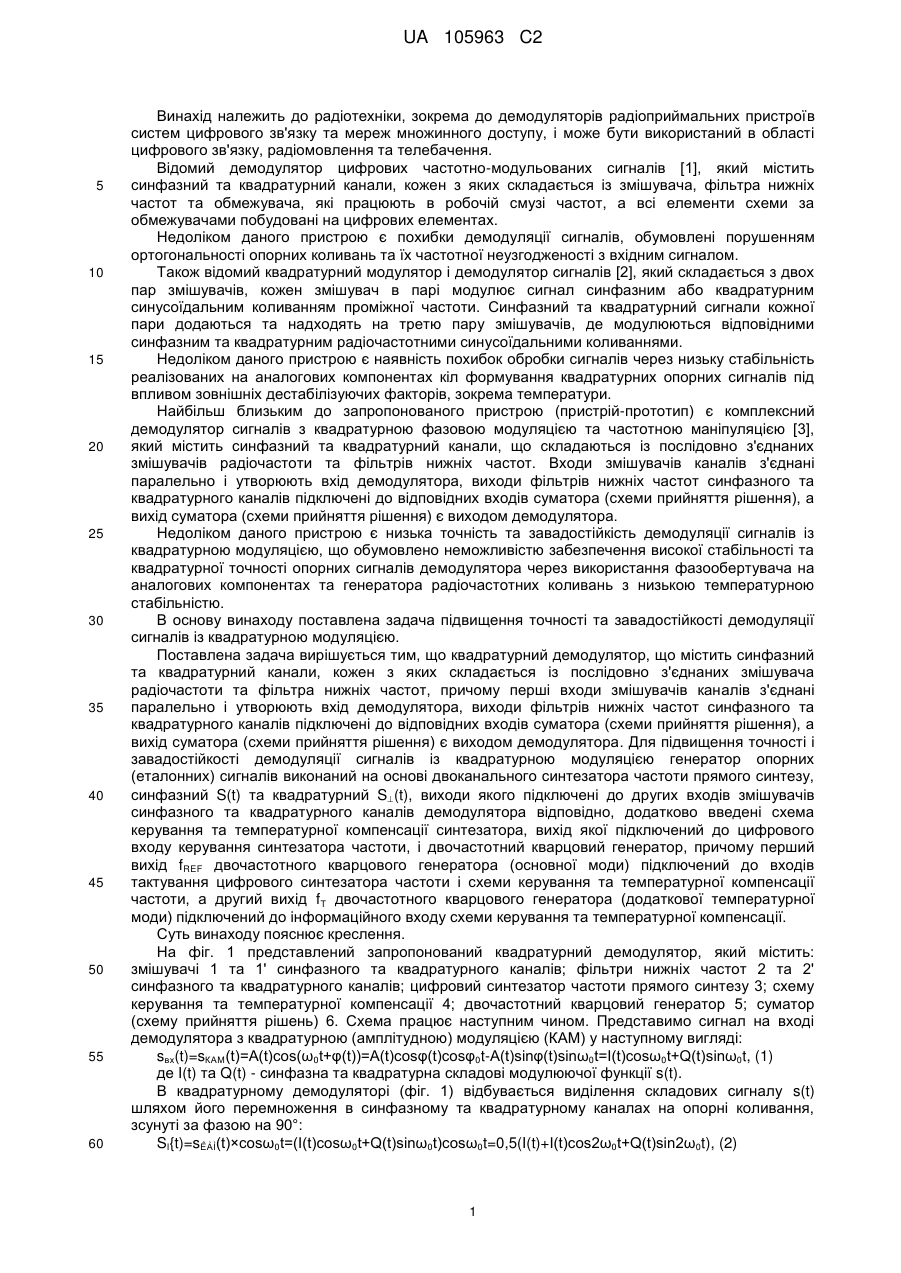
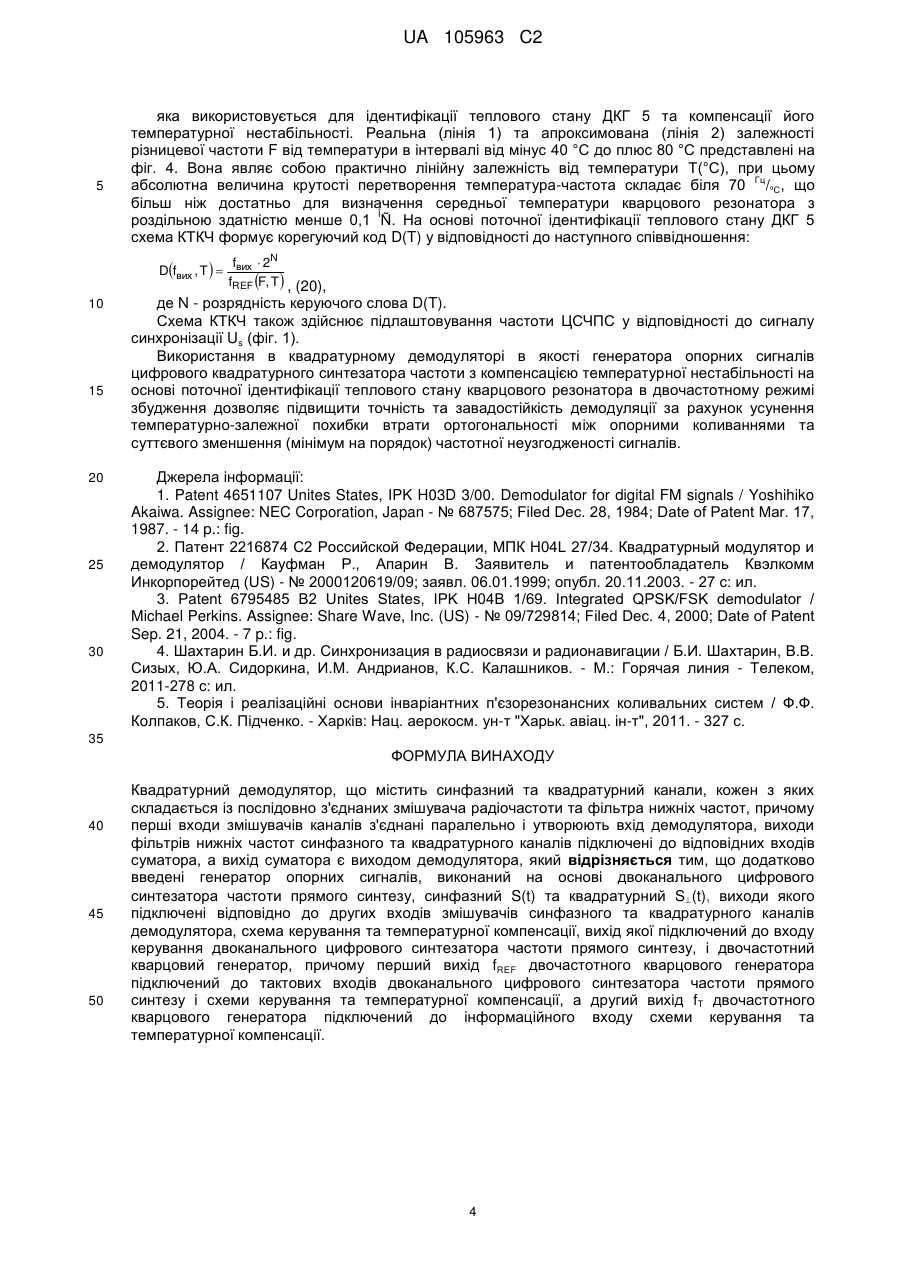
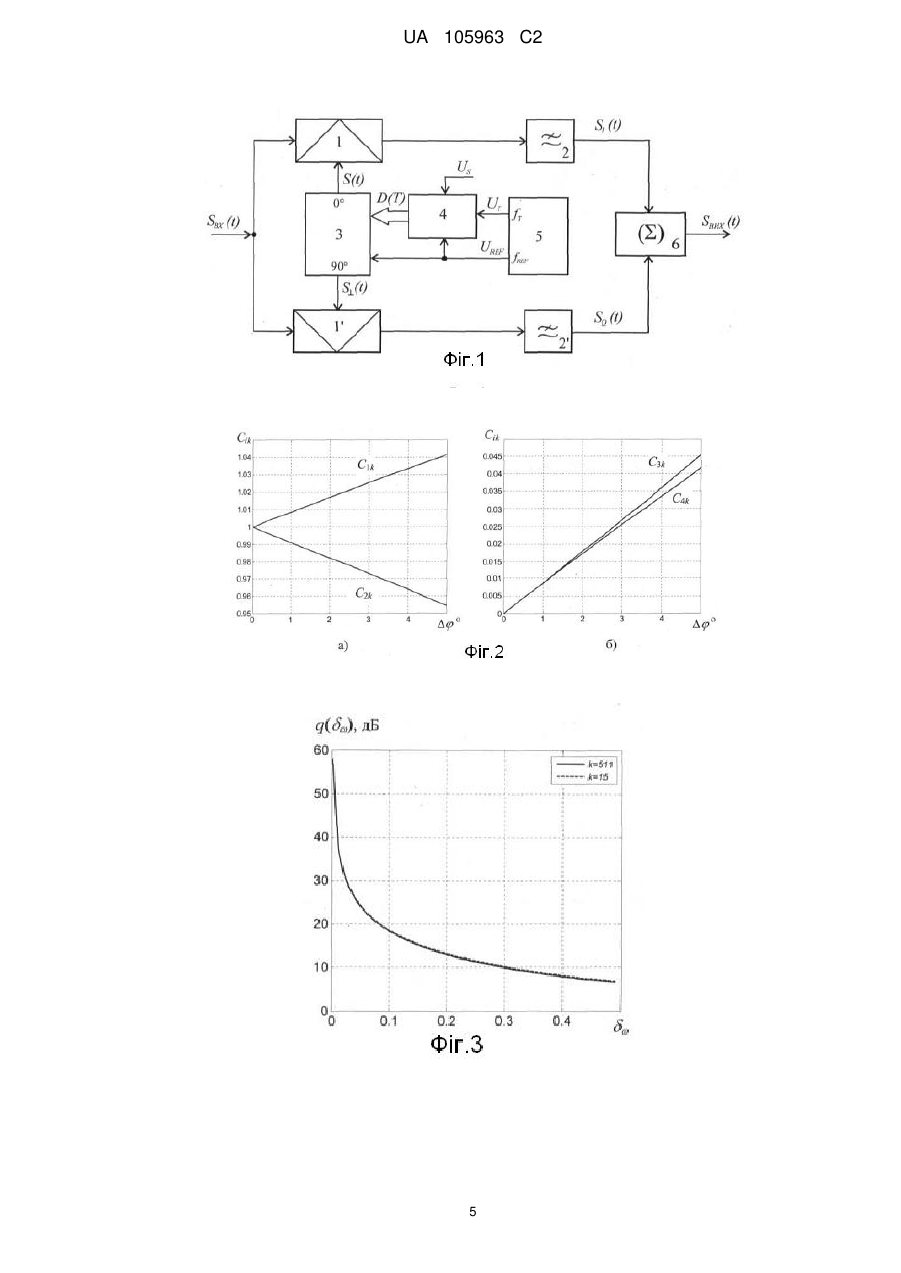
Реферат: Квадратурний демодулятор належить до радіотехніки, зокрема до демодуляторів радіоприймальних пристроїв систем цифрового зв'язку та мереж множинного доступу, і може бути використаний в області цифрового зв'язку, радіомовлення та телебачення. Квадратурний демодулятор містить синфазний та квадратурний канали, які складаються із послідовно з'єднаних змішувачів радіочастоти та фільтрів нижніх частот, виходи яких підключені до входів суматора, а вихід суматора є виходом демодулятора. Для підвищення точності і завадостійкості демодуляції сигналів із квадратурною модуляцією генератор опорних сигналів виконаний на основі двоканального квадратурного синтезатора частоти прямого синтезу, встановлення частоти якого здійснюється спеціальною схемою керування та температурної компенсації. Як тактовий використаний двочастотний кварцовий генератор з поточною ідентифікацією теплового стану кварцового резонатора. Використання в квадратурному демодуляторі цифрового квадратурного синтезатора частоти з компенсацією температурної нестабільності на основі поточної ідентифікації теплового стану кварцового резонатора в двочастотному режимі збудження дозволяє підвищити точність та завадостійкість демодуляції за рахунок усунення температурно-залежної похибки втрати ортогональності між опорними коливаннями та суттєвого зменшення температурно-частотної неузгодженості сигналів. UA 105963 C2 (12) UA 105963 C2 UA 105963 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до радіотехніки, зокрема до демодуляторів радіоприймальних пристроїв систем цифрового зв'язку та мереж множинного доступу, і може бути використаний в області цифрового зв'язку, радіомовлення та телебачення. Відомий демодулятор цифрових частотно-модульованих сигналів [1], який містить синфазний та квадратурний канали, кожен з яких складається із змішувача, фільтра нижніх частот та обмежувача, які працюють в робочій смузі частот, а всі елементи схеми за обмежувачами побудовані на цифрових елементах. Недоліком даного пристрою є похибки демодуляції сигналів, обумовлені порушенням ортогональності опорних коливань та їх частотної неузгодженості з вхідним сигналом. Також відомий квадратурний модулятор і демодулятор сигналів [2], який складається з двох пар змішувачів, кожен змішувач в парі модулює сигнал синфазним або квадратурним синусоїдальним коливанням проміжної частоти. Синфазний та квадратурний сигнали кожної пари додаються та надходять на третю пару змішувачів, де модулюються відповідними синфазним та квадратурним радіочастотними синусоїдальними коливаннями. Недоліком даного пристрою є наявність похибок обробки сигналів через низьку стабільність реалізованих на аналогових компонентах кіл формування квадратурних опорних сигналів під впливом зовнішніх дестабілізуючих факторів, зокрема температури. Найбільш близьким до запропонованого пристрою (пристрій-прототип) є комплексний демодулятор сигналів з квадратурною фазовою модуляцією та частотною маніпуляцією [3], який містить синфазний та квадратурний канали, що складаються із послідовно з'єднаних змішувачів радіочастоти та фільтрів нижніх частот. Входи змішувачів каналів з'єднані паралельно і утворюють вхід демодулятора, виходи фільтрів нижніх частот синфазного та квадратурного каналів підключені до відповідних входів суматора (схеми прийняття рішення), а вихід суматора (схеми прийняття рішення) є виходом демодулятора. Недоліком даного пристрою є низька точність та завадостійкість демодуляції сигналів із квадратурною модуляцією, що обумовлено неможливістю забезпечення високої стабільності та квадратурної точності опорних сигналів демодулятора через використання фазообертувача на аналогових компонентах та генератора радіочастотних коливань з низькою температурною стабільністю. В основу винаходу поставлена задача підвищення точності та завадостійкості демодуляції сигналів із квадратурною модуляцією. Поставлена задача вирішується тим, що квадратурний демодулятор, що містить синфазний та квадратурний канали, кожен з яких складається із послідовно з'єднаних змішувача радіочастоти та фільтра нижніх частот, причому перші входи змішувачів каналів з'єднані паралельно і утворюють вхід демодулятора, виходи фільтрів нижніх частот синфазного та квадратурного каналів підключені до відповідних входів суматора (схеми прийняття рішення), а вихід суматора (схеми прийняття рішення) є виходом демодулятора. Для підвищення точності і завадостійкості демодуляції сигналів із квадратурною модуляцією генератор опорних (еталонних) сигналів виконаний на основі двоканального синтезатора частоти прямого синтезу, синфазний S(t) та квадратурний S(t), виходи якого підключені до других входів змішувачів синфазного та квадратурного каналів демодулятора відповідно, додатково введені схема керування та температурної компенсації синтезатора, вихід якої підключений до цифрового входу керування синтезатора частоти, і двочастотний кварцовий генератор, причому перший вихід fREF двочастотного кварцового генератора (основної моди) підключений до входів тактування цифрового синтезатора частоти і схеми керування та температурної компенсації частоти, а другий вихід fT двочастотного кварцового генератора (додаткової температурної моди) підключений до інформаційного входу схеми керування та температурної компенсації. Суть винаходу пояснює креслення. На фіг. 1 представлений запропонований квадратурний демодулятор, який містить: змішувачі 1 та 1' синфазного та квадратурного каналів; фільтри нижніх частот 2 та 2' синфазного та квадратурного каналів; цифровий синтезатор частоти прямого синтезу 3; схему керування та температурної компенсації 4; двочастотний кварцовий генератор 5; суматор (схему прийняття рішень) 6. Схема працює наступним чином. Представимо сигнал на вході демодулятора з квадратурною (амплітудною) модуляцією (КАМ) у наступному вигляді: sвх(t)=sКАМ(t)=A(t)cos(ω0t+φ(t))=A(t)cosφ(t)cosφ0t-A(t)sinφ(t)sinω0t=I(t)cosω0t+Q(t)sinω0t, (1) де I(t) та Q(t) - синфазна та квадратурна складові модулюючої функції s(t). В квадратурному демодуляторі (фіг. 1) відбувається виділення складових сигналу s(t) шляхом його перемноження в синфазному та квадратурному каналах на опорні коливання, зсунуті за фазою на 90°: SI{t)=sÊÀÌ(t)×cosω0t=(I(t)cosω0t+Q(t)sinω0t)cosω0t=0,5(I(t)+I(t)cos2ω0t+Q(t)sin2ω0t), (2) 1 UA 105963 C2 5 10 15 20 25 30 35 40 45 50 55 60 sQ(t)=sÊÀÌ(t)×sinω0t=(I(t)cosω0t+Q(t)sinω0t)sinω0t=0,5(Q(t)+I(t)sin2ω0t-Q(t)cos2ω0t). (3) В результаті перемноження отримуються низькочастотні складові, пропорційні I(t) і Q(t) та КАМ сигнали з подвійною частотою, які придушуються ФНЧ. Тоді: sI(t)=0,5I(t), sQ(t)=0,5Q(t). (4) Для ефективної роботи КАМ важливо забезпечити точну відповідність частоти та фази опорних коливань. Якщо ж в системі присутні аналогові компоненти, то підтримувати високу точність ортогональності опорних сигналів синфазного і квадратурного каналів досить важко. Зокрема, різниця їх фаз буде змінюватися під впливом температури та інших дестабілізуючих факторів. Так, наявність фазової похибки Δφ призводить до появи на виходах демодулятора лінійної комбінації модулюючих функцій: sI(t)=sÊÀÌ(t)×cos(ω0t+Δφ(t))=(I(t)cosω0t+Q(t)sinω0t)cos(ω0t+Δφ(t))= 0,5{I(t)cosΔφ(t)-(t)sinΔφ(t)+I(t)cos(2ω0t+Δφ(t))+Q(t)cos(2ω0t+Δφ(t))}; (5) SQ(t)=sÊÀÌ(t)×sin(ω0t+Δφ(t))=(I(t)cosω0t+Q(t)sinωot)sin(ωot+Δφ(t))= =0,5{I(t)sinΔφ(t)+Q(t)cosΔφ(t)+I(t)cos(2ω0t+Δφ(t))-Q(t)cos(2ω0t+Δφ(t))}, (6) тобто до появи міжканальних завад (змішування каналів): sI(t)=0,5{I(t)cosΔφ(t)-Q(t)sinΔφ(t)}, (7) sQ(t)=0,5{I(t)sinΔφ(t)+Q(t)cosΔφ(t)}. (8) В свою чергу за наявності помилки за частотою фазовий зсув лінійно змінюється у часі (Δφ=Δωt). Тоді, з урахуванням (7), (8) отримаємо sI(t)=0,5{I(t)cosΔωt-Q(t)sinΔωt}; (9) sQ(t)=0,5{I(t)sinΔωt-Q(t)cosΔωt}, (10) тобто, окрім змішування каналів, відбувається їх модуляція за амплітудою з частотою биття Δω. Розглянемо спотворення сигналу із-за втрати ортогональності між опорними коливаннями та частотної неузгодженості в системах з ортогональним частотним розділенням каналів (OFDM), які знайшли широке використання в сучасних системах цифрового телебачення DVB-T/T2. Представимо комплексну обвідну сигналу k-тої підносійної ωk як: іωkt (Аk+іВk)е =(Аk+iBk)[cosωkt+isinωkt]=Ik(t)+iQk(t), (11), де Ik(t)=Akcosωkt-Bksinωkt, Qk(t)=Аksinωkt+Вkcosωkt - синфазна та квадратурна складові. Тоді сигнал за умови передачі однієї підносійної: sk(t)=Іk(t)cosω0t+Qk(t)sinω0t=(Ak/2){cos(ω0-ωk)t+cos(ω0+ωk)t}+(Ak/2){cos(ω0-ωk)t-cos(ω0+ωk)t}+ +(Bk/2){sin(ω0-ωk)t-sin(ω0+ωk)t}+(Bk/2){sin(ω0-ωk)t+sin(ω0+ωk)t}=Akcos(ω0-ωk)t+Bksin(ω0-ωk)t, (12), де ω0 - носійна частота групового сигналу. Нехай сигнал гетеродину у синфазному каналі має вигляд cosω0t, а у квадратурному sin(ω0t+Δφ(t)). У даному випадку переданий сигнал для k-тої підносійної, яка включає в себе фазову помилку Δφ(t), буде мати вигляд: s'k(t)=Іk(t)cos(ω0t)+Qk(t)sin(ω0t+Δφ(t))=(Ak/2){cos(ω0-ωk)t+cos(ω0+ωk)t}+ +(Ak/2){cos[(ω0-ωk)t+Δφ(t)]-сos[(ω0+ωk)t+Δφ(t)]}+ +(Bk/2){sin(ω0-ωk)t-sin(ω0+ωk)t}+(Bk/2){sin[(ω0-ωk)t+Δφ(t)]+sin[(ω0+ωk)t+Δφ(t)]}= =C1kcos[(ω0-ωk)t]+C2ksin[(ω0-ωk)t]+C3kcos[(ω0+ωk)t]+C4ksin[(ω0+ωk)t], (13), де C1k=(Ak/2)[1+cosΔφ(t)]+(Bk/2)sinΔφ(t); C2k=-(Ak/2)sinΔφ(t)]+(Bk/2)[1+cosΔφ(t)]; C3k=(Ak/2)[1-cosΔφ(t)]+(Bk/2)sinΔφ(t); C4k=(Ak/2)sinΔφ(t)]+(Bk/2)[cosΔφ(t)]. З отриманих співвідношень зрозуміло, що втрата ортогональності опорних коливань викликає суттєві спотворення сигналу. Залежності Сіk для Аіk=Віk=1, k 1,4 представлені на фіг. о 2. Видно, що в інтервалі Δφ[0;5 ] дані залежності можна вважати лінійними. При незмінній смузі частот складеного сигналу ODFM із збільшенням числа паралельних каналів відбувається пропорційне звуження смуги частот, що відводиться кожному з них. Так як спектри підносійних в значній мірі перекриваються, то навіть невелика неузгодженість по частоті призводить до значної міжканальної інтерференції (МКІ). Представимо помилку по частоті у вигляді суми двох помилок: Δf=(nω+δω)fc, (14), де fс - крок сітки частот; nω=Δf/fc - ціле число; δω=Δfmodfc – дробова частина. Неузгодженість на величину nωfc, кратну відстані між підносійними призводить до зсуву сигналу в частотній області на nω відліків. Наявність ненульової дробової частини частотної неузгодженості призводить до того, що при дискретизації спектру сигналу наслідком порушення ортогональності підносійних є перерозподіл енергії між відліками: 2 UA 105963 C2 X ї ð k Xt k TS / 2 1 TS s їåð TS / 2 t expi2fc t exp i2kf c t dt sin sin j Xt k j j k X ї ð k X їåå k NÌÊ 2 k , ; (15) де Xїåð(k), Хїð(k) - спектральне представлення сигналів, що передаються та приймаються для 5 10 k-тої підносійної; α(δω) - ослаблення корисного сигналу; NÌÊ k завада, викликана між канальною інтерференцією. Форма спектра підносійних описується функцією sin(x)/x. Із-за порушення ортогональності системи відбувається ослаблення корисного сигналу в а(δω)=sin(πδω)/πδω раз, а дисперсія завади, викликана МКІ (за умови, що випадкові величини Хr(k) є центрованими і некорельованими для різних k): 2 DNÌÊ 2 2 ÌÊ 2 sin k D Xr k k k 0 sin k sin k A2 k k 0 k DXr k k 0 2 , (16) 2 де A - середній квадрат модуля комплексної амплітуди підносійних. Тоді відношення сигнал-завада можна представити як: 2 A q SNR 2 sin k A2 k 0 k 2 sin 15 20 25 30 sin 2 sin k k 0 k 2 . (17) Так як величина sin(π(Sω+k))/π(δω+k) швидко убуває із збільшенням k, то завада від МКІ визначається більшою мірою найближчими підносійними, а її дисперсія мало залежить від числа каналів. Залежність сигнал-завада (SNR) від δω для центральної підносійної спектру для k=15 та k=511 представлена на фіг.3. Як видно, вплив МКІ виявляється значним навіть при малих значеннях δω. Для функціонування системи без істотного погіршення робочих характеристик необхідно забезпечити неузгодженість по частоті менше 1 % відстані між подносійними (δω
ДивитисяДодаткова інформація
Автори англійськоюTaranchuk Alla Anatoliivna, Stetsiuk Viktor Ivanovych
Автори російськоюТаранчук Алла Анатольевна, Стецюк Виктор Иванович
МПК / Мітки
МПК: H04L 27/14
Мітки: квадратурний, демодулятор
Код посилання
<a href="https://ua.patents.su/8-105963-kvadraturnijj-demodulyator.html" target="_blank" rel="follow" title="База патентів України">Квадратурний демодулятор</a>
Демодулятор сигналів з амплітудно-фазовою модуляцією
Номер патенту: 22274
Опубліковано: 25.04.2007
Автор: Коханов Олександр Борисович
МПК: H03D 99/00
Мітки: модуляцією, сигналів, амплітудно-фазовою, демодулятор
Формула / Реферат:
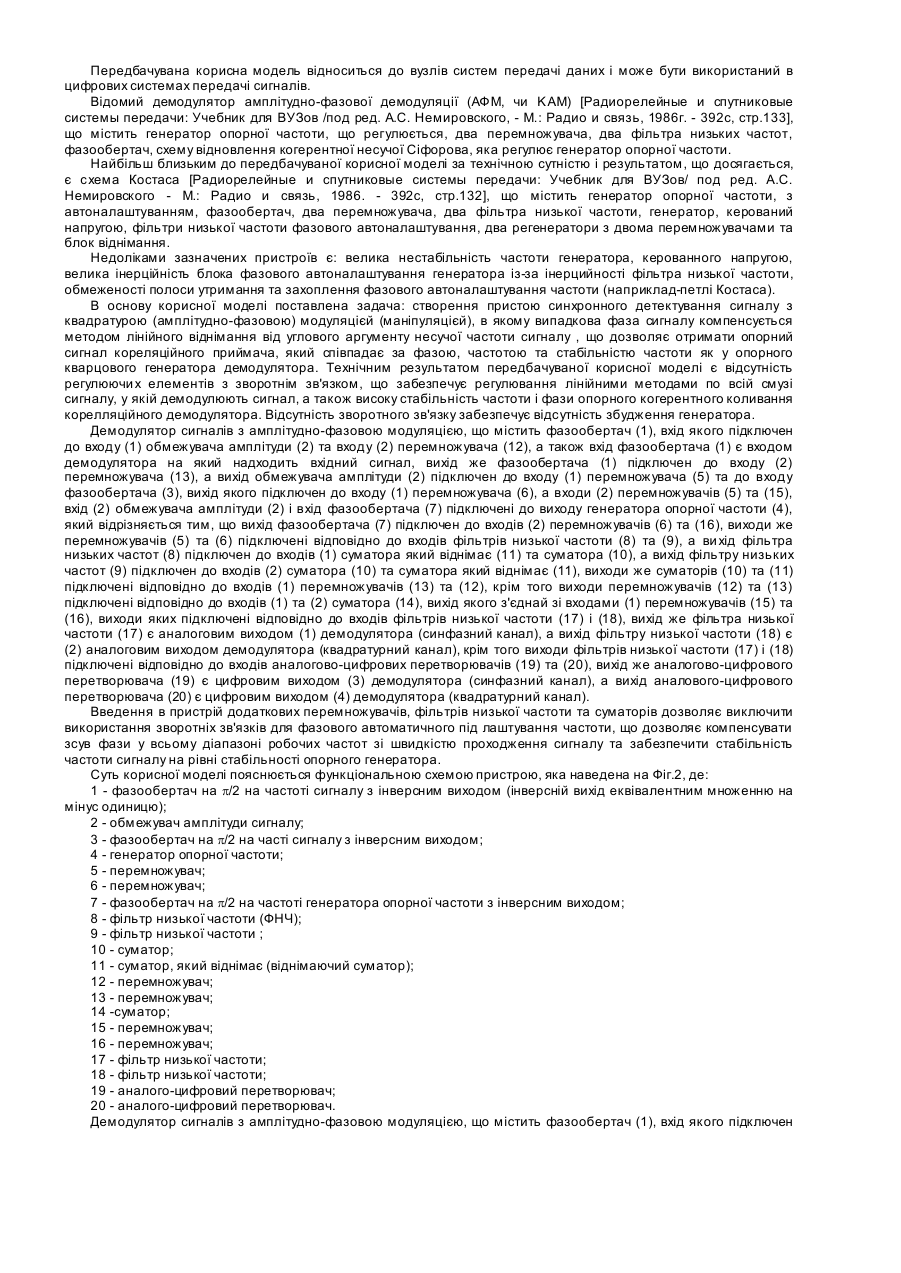
Демодулятор сигналів з амплітудно-фазовою модуляцією, що містить фазообертач (1), вхід якого підключений до першого входу обмежувача амплітуди (2) та другого входу перемножувача (12), а також вхід фазообертача (1) є входом демодулятора, на який надходить вхідний сигнал, вихід фазообертача (1) підключений до другого входу перемножувача (13), а вихід обмежувача амплітуди (2) підключений до першого входу перемножувача (5) та до входу...
Квадратурний модулятор з однією боковою смугою
Номер патенту: 103563
Опубліковано: 25.10.2013
Автор: Коханов Олександр Борисович
МПК: H04L 27/04, H03C 1/00
Мітки: боковою, модулятор, однією, квадратурний, смугою
Формула / Реферат:
Квадратурний модулятор з однією боковою смугою, що містить перший перетворювач Гілберта (1), вхід якого є синфазним входом пристрою, який відрізняється тим, що вхід першого перетворювача Гілберта також з'єднаний з входом першого комутатора знака (2), вихід якого підключенo до першого входу першого суматора (3), до другого входу якого підключенo вихід другого комутатора знака (4), а його вхід, в свою чергу, підключенo до виходу другого...
Демодулятор цифрового модему
Номер патенту: 74319
Опубліковано: 25.10.2012
Автори: Шляховий Володимир Дмитрович, Байдан Ігор Омелянович
МПК: H04L 27/22
Мітки: демодулятор, модему, цифрового
Формула / Реферат:
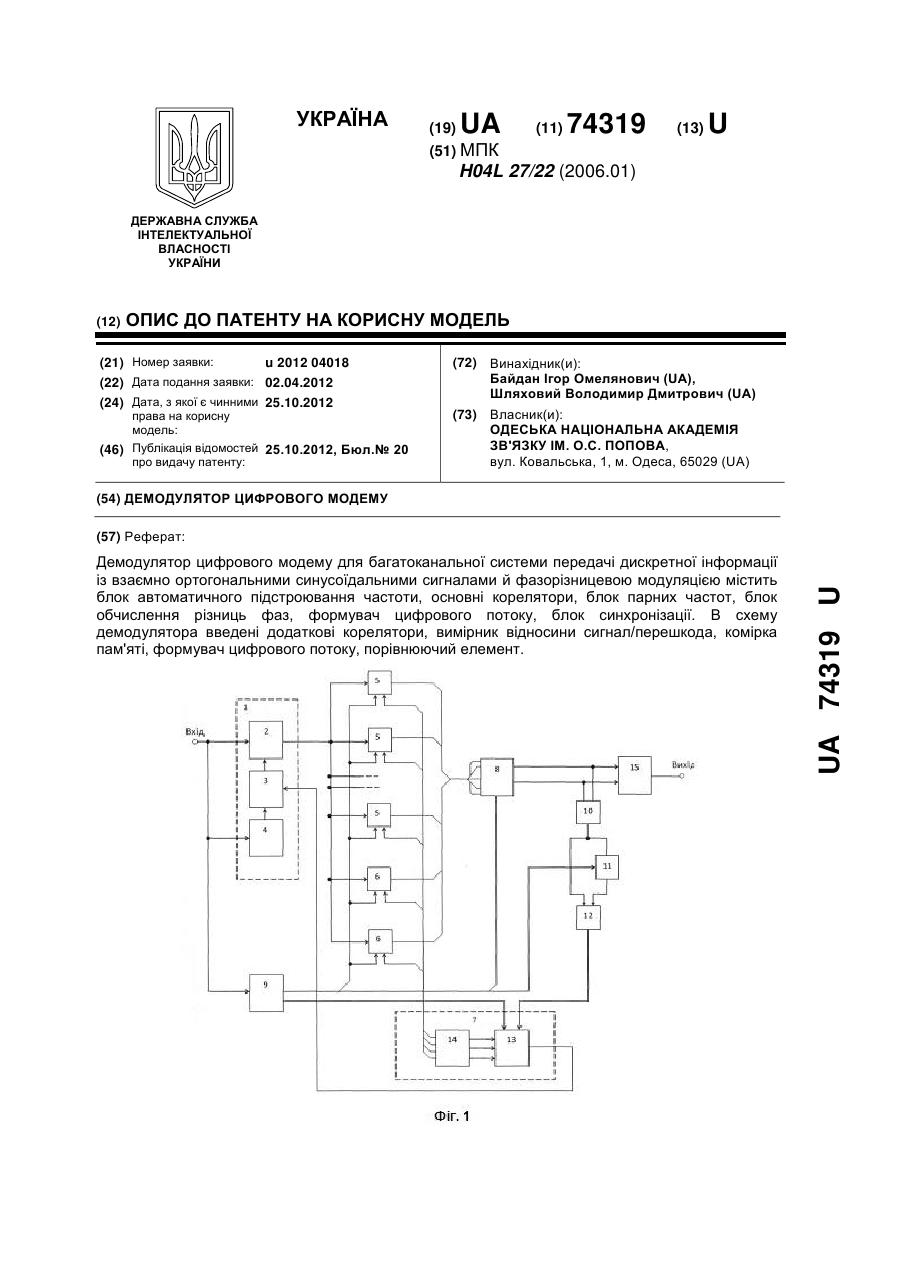
Демодулятор цифрового модему для багатоканальної системи передачі дискретної інформації із взаємно ортогональними синусоїдальними сигналами й фазорізницевою модуляцією, що містить блок автоматичного підстроювання частоти, основні корелятори, блок парних частот, блок обчислення різниць фаз, формувач цифрового потоку, блок синхронізації, який відрізняється тим, що в схему демодулятора введені додаткові корелятори, вимірник відносини...
Демодулятор сигналу із частотною маніпуляцією
Номер патенту: 80395
Опубліковано: 27.05.2013
Автори: Лисенко Валентин Олександрович, Диденко Віктор Борисович
МПК: H03D 99/00
Мітки: маніпуляцією, демодулятор, сигналу, частотною
Формула / Реферат:
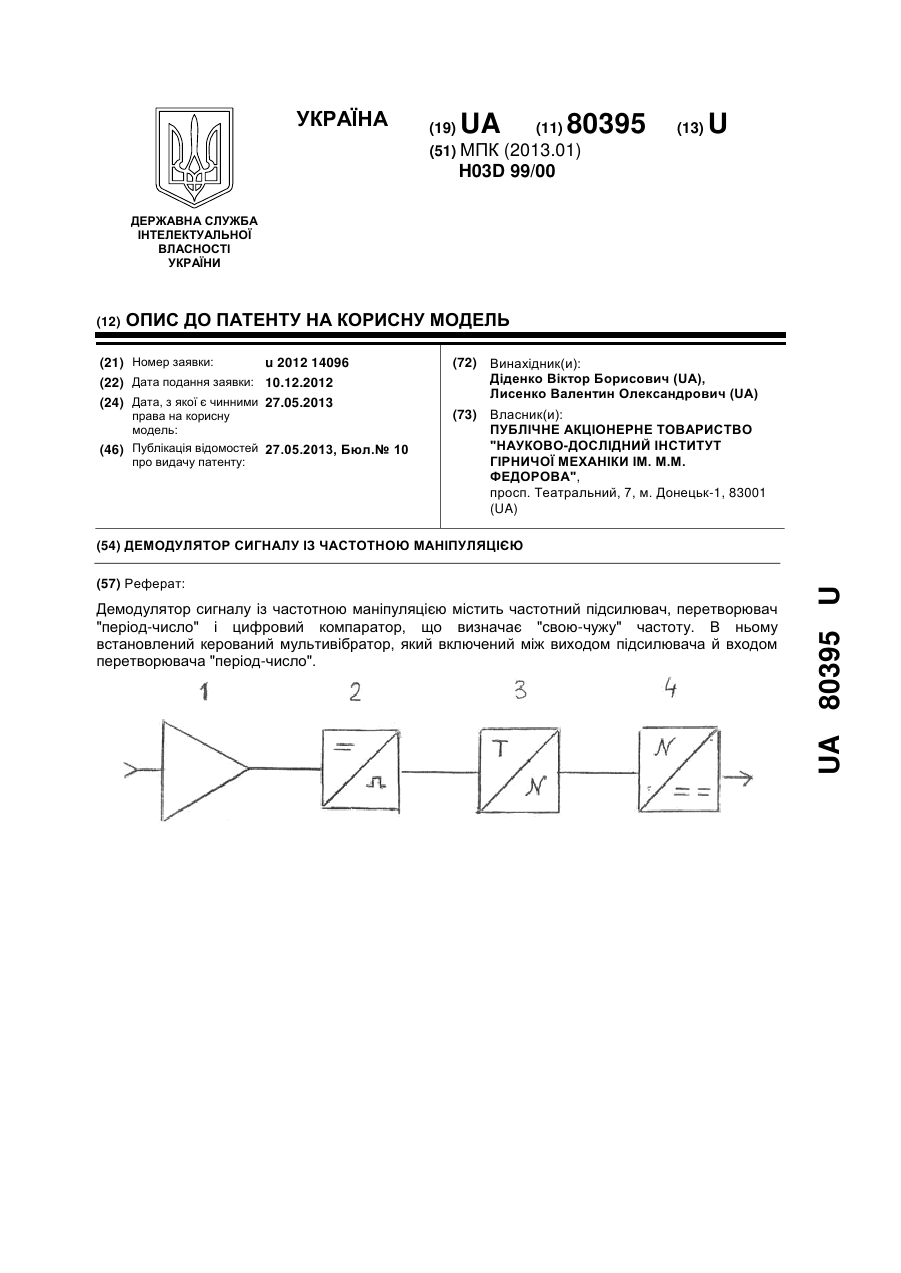
Демодулятор сигналу із частотною маніпуляцією, що містить частотний підсилювач, перетворювач "період-число" і цифровий компаратор, що визначає "свою-чужу" частоту, який відрізняється тим, що в ньому встановлений керований мультивібратор, який включений між виходом підсилювача й входом перетворювача "період-число".
Демодулятор сигналів відносної фазової маніпуляції
Номер патенту: 3915
Опубліковано: 27.12.1994
Автор: Голуб Владислав Сергійович
МПК: H04L 27/22
Мітки: фазової, демодулятор, відносної, сигналів, маніпуляції
Формула / Реферат:
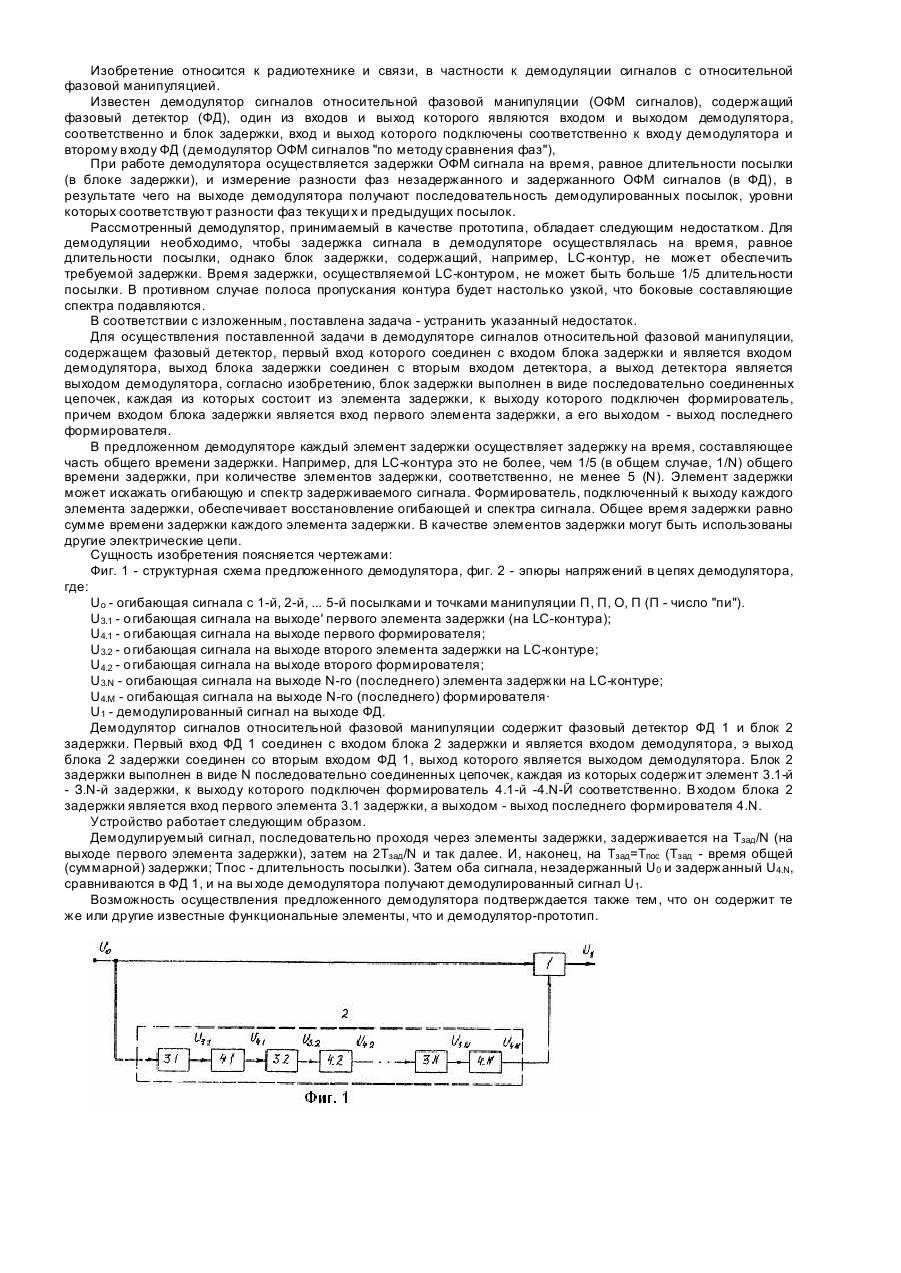
Демодулятор сигналов относительной фазовой манипуляции, содержащий фазовый детектор, первый вход которого соединен с входом блока задержки и является входом демодулятора, выход блока задержки соединен со вторым входом фазового детектора, выход которого является выходом демодулятора, отличающийся тем, что блок задержки выполнен в виде последовательно соединенных цепочек, каждая из которых состоит из элемента задержки, к выходу которого...
Попередній патент: Інформаційно-керуюча система управління вогнем танка
Наступний патент: Спосіб створення невагомості контейнера на стенді вільного падіння та пристрій для здійснення способу
Випадковий патент: Пристрій і спосіб очищення технологічного розчину гравітаційним осадженням