Спосіб визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району
Номер патенту: 110729
Опубліковано: 10.02.2016
Автори: Колій Олександр Сергійович, Денисенко Олег Васильович
Формула / Реферат
Спосіб визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району, обмеженого транспортними вузлами, оснований на скануванні гостроспрямованим лазерним променем зони транспортного вузла з точки над його геометричним центром конусним виглядом розгортки, причому оптична вісь першого з положень розгортки променя вибирається так, щоб він описував перше коло на проїжджій частині транспортного вузла в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється в реперній точці з високою швидкістю по черзі через кожен період сканування, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип та час пересування транспортних засобів в зоні стоп-лінії, напрямки їх руху по смугах, кількість транспортних засобів і час їх перетинання зони стоп-ліній по всіх смугах руху упродовж певного періоду часу, який відрізняється тим, що додатково сканування здійснюють по усіх перегонах на границях між сусідніми транспортними районами в поперечному перетині перегонів у двох паралельних площинах таким чином, що при зміні положення кута нахилу променя почергово на кожному періоді сканування на поверхні дороги утворюються дві паралельні лінії з певною дистанцією між ними, після чого здійснюється прийом відображених оптичних сигналів фотоприймачами і надалі перетворення цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип, напрямки їх руху, кількість транспортних засобів і час перетинання ними ліній сканування по всіх смугах руху упродовж певного періоду часу, визначають різницю між кількістю транспортних засобів з урахуванням їх типу, що проїхали границю даного транспортного району у розрізі перегону та кількістю і типом транспортних засобів, що перетнули вхід до транспортного вузла в зоні стоп-лінії, а також різницю між кількістю та типом транспортних засобів, що виїхали з транспортного вузла по цьому перегону в напрямку сусіднього транспортного вузла або зовнішньої границі транспортного району, та кількістю і типом транспортних засобів, що зафіксовані на границі цього транспортного району, а загальне значення обсягів прибуття та відправлення транспортних засобів до транспортного району, обмеженого транспортними вузлами, визначають одночасно та синхронізовано в єдиному обчислювальному центрі як суму обсягів всіх частин перегонів, які примикають до цього транспортного району та транспортних вузлів, причому враховуються тільки ті транспортні засоби, що за час виміру повністю перетнули зони сканування обох лазерних-променів.
Текст
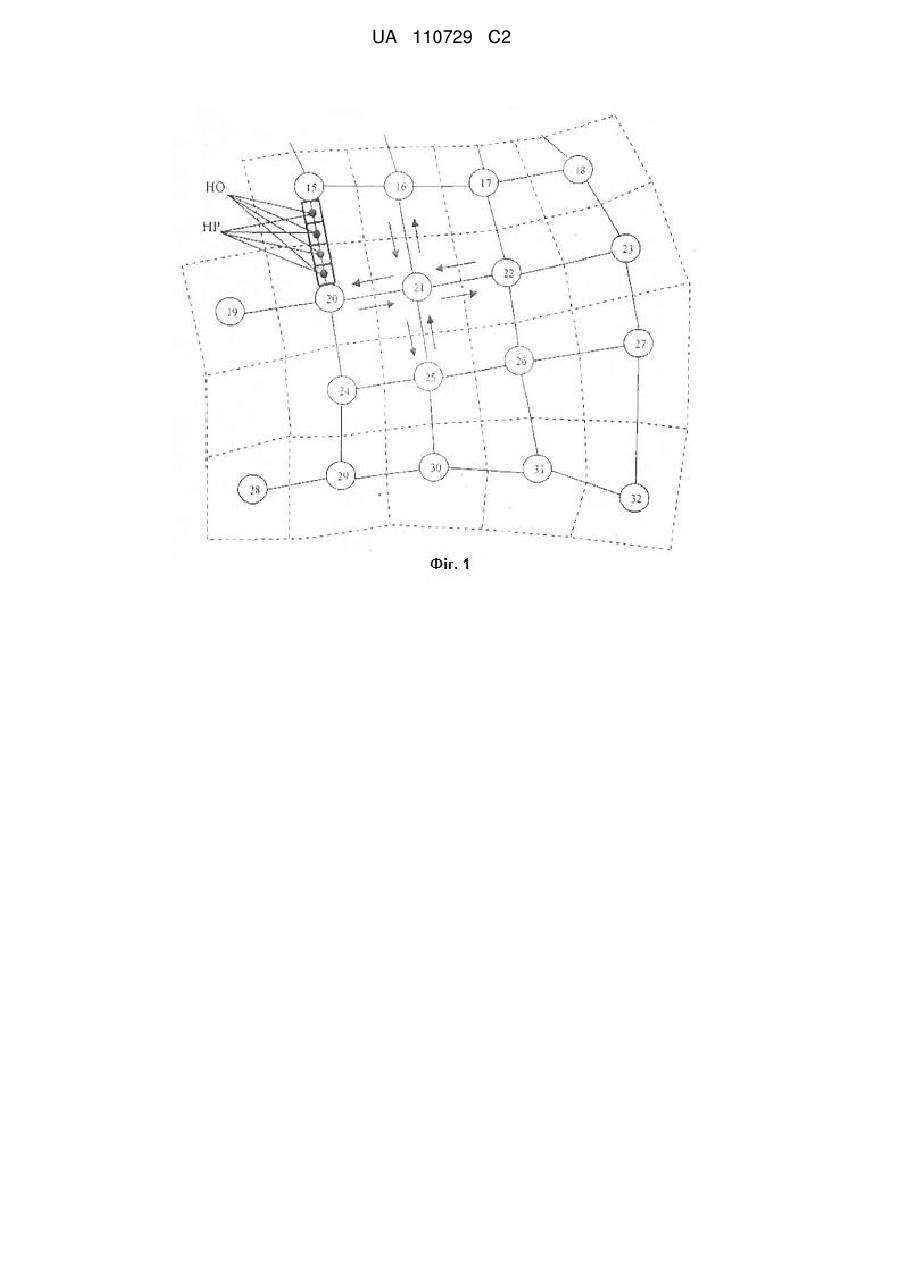
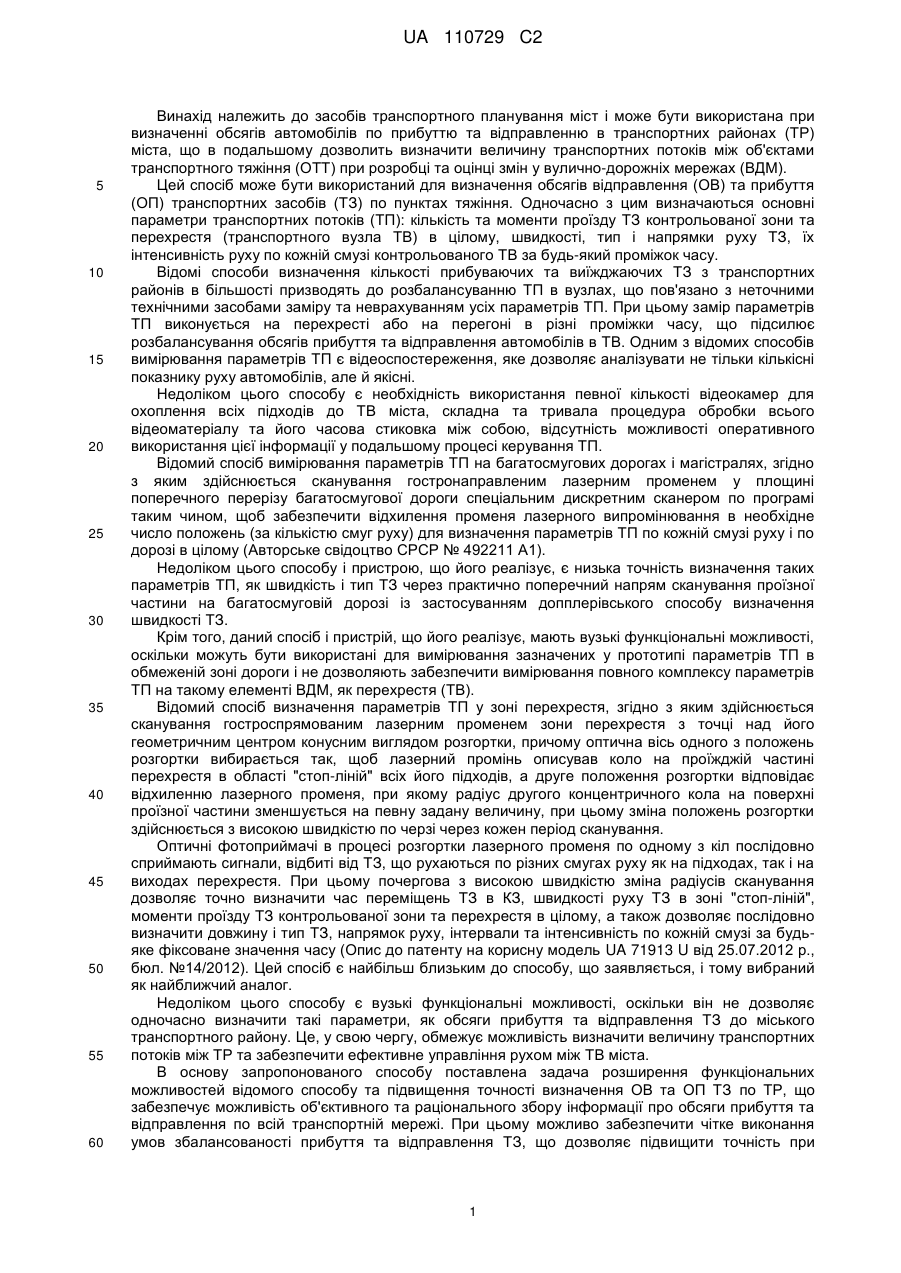
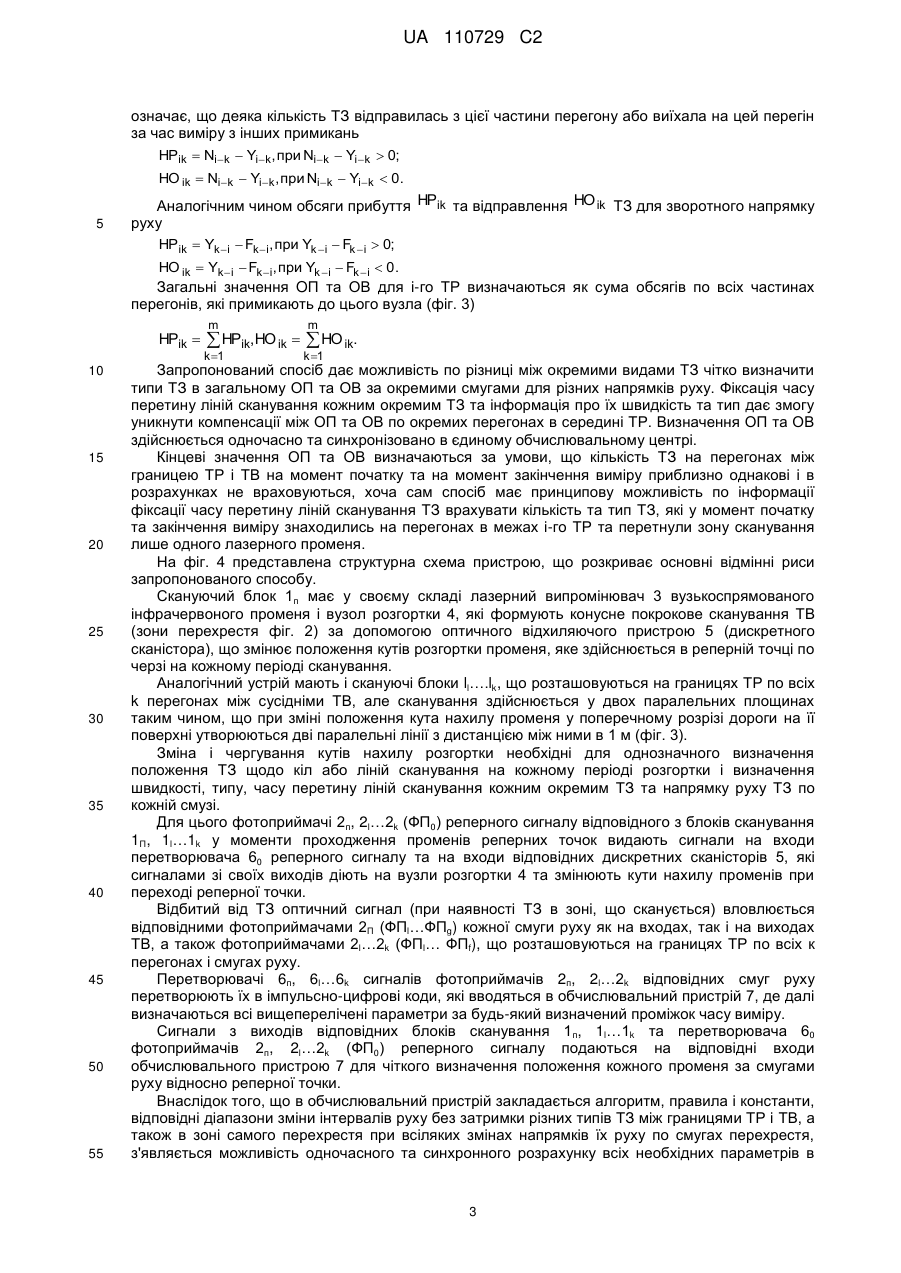
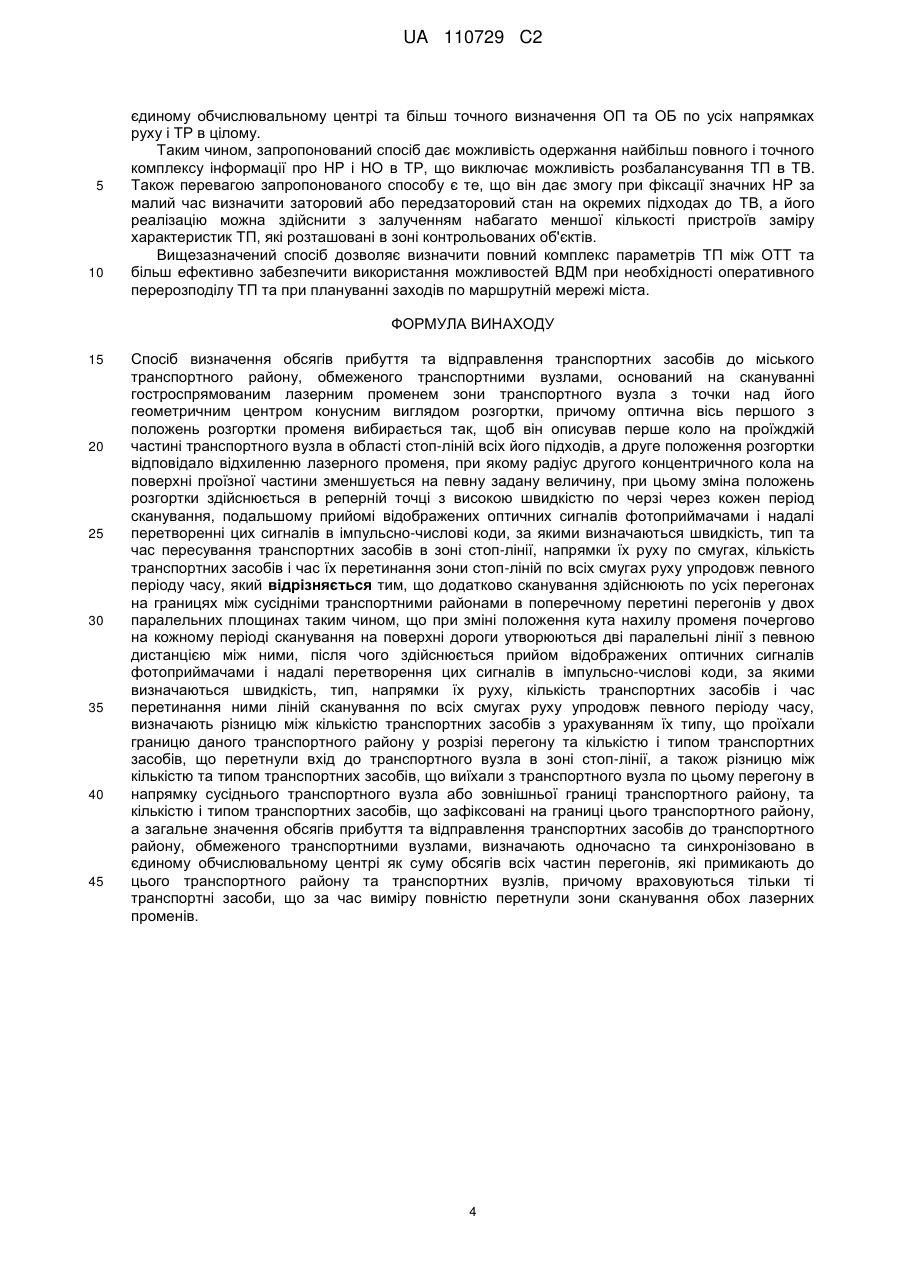
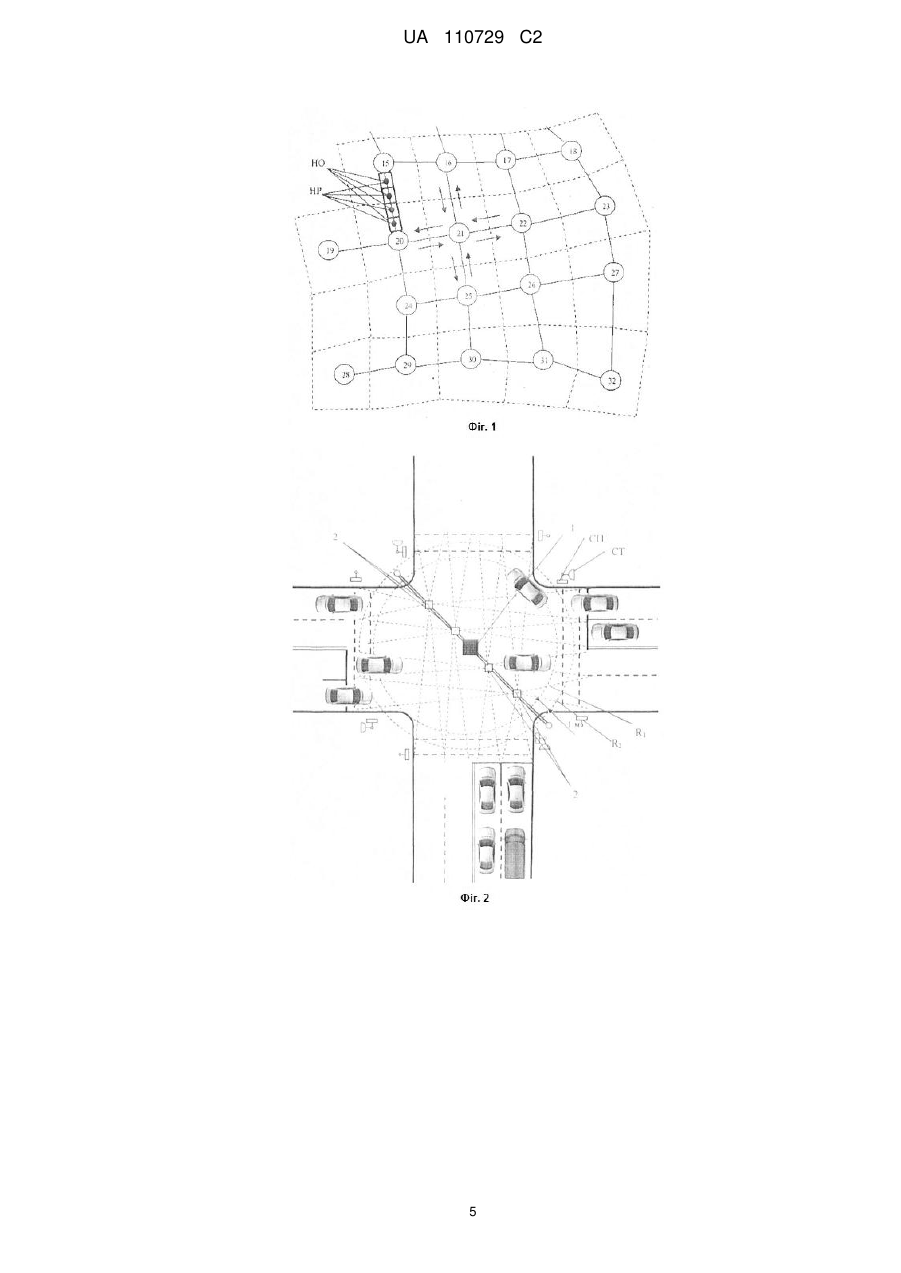
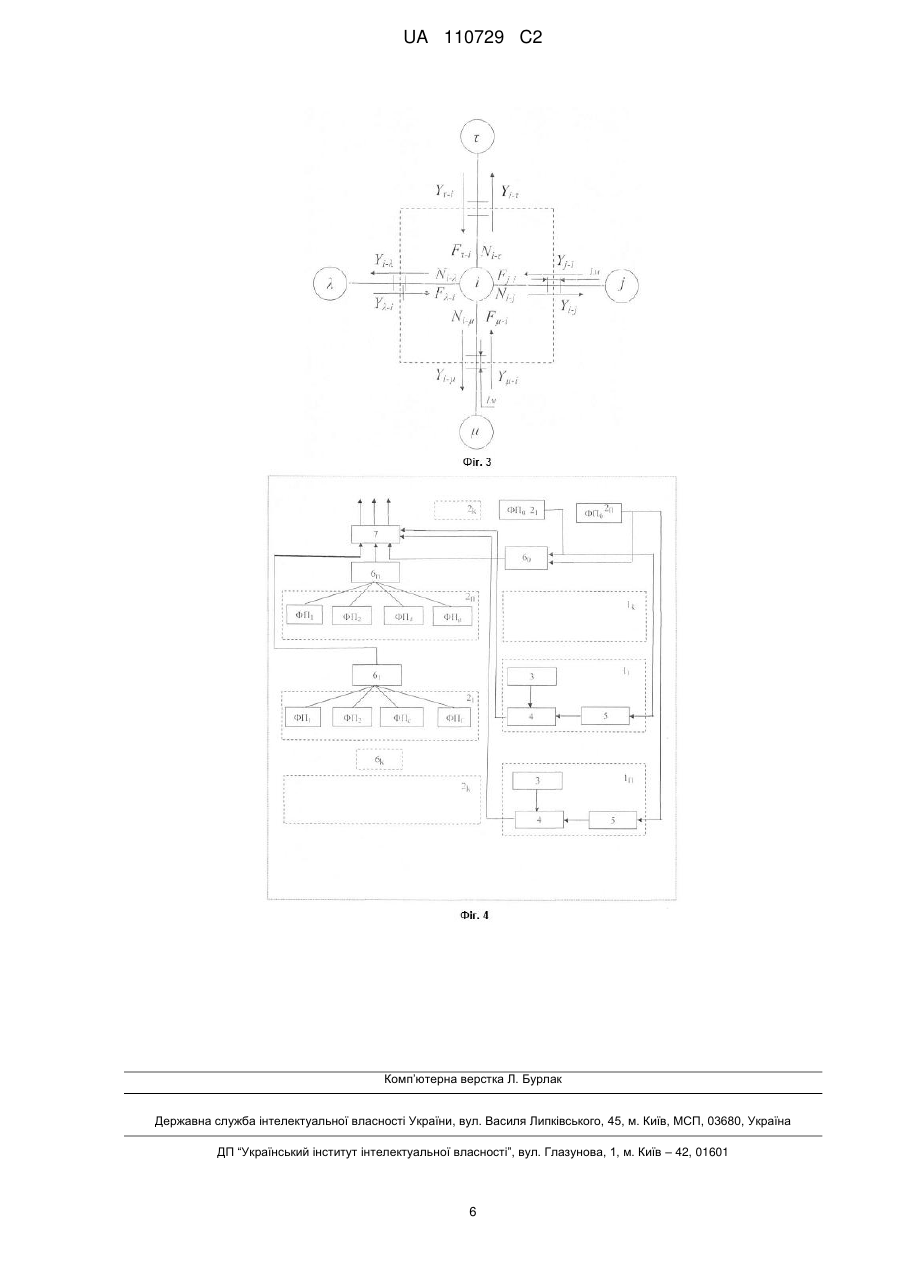
Реферат: Спосіб визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району належить до засобів транспортного планування міст і може бути використана при визначенні обсягів транспортних засобів по прибуттю та відправленню в транспортних районах міста. Спосіб оснований на скануванні гостроспрямованим лазерним променем зони транспортного вузла в точці над його геометричним центром конусним виглядом розгортки, подальшому прийомі відображених оптичних сигналів, за якими визначаються швидкість, тип та час пересування транспортних засобів в зоні стоп-лінії, напрямки їх руху за смугами, кількість транспортних засобів і час їх перетинання зони стоп-ліній по всіх смугах руху упродовж певного періоду часу. Сканування по усіх перегонах на границях між сусідніми транспортними районами в поперечному перерізі перегонів у двох паралельних площинах здійснюється таким чином, що виникає можливість визначення усіх перелічених вище параметрів транспортних потоків по всіх смугах і напрямках руху і, надалі, визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району. Запропонований винахід дозволяє за малий час отримати найбільш повний і точний комплекс інформації про обсяги знаходження транспортних засобів в транспортному районі, що в подальшому дозволить визначити величину транспортних потоків між об'єктами транспортного тяжіння, при розробці та оцінці змін у вулично-дорожніх мережах. UA 110729 C2 (12) UA 110729 C2 UA 110729 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до засобів транспортного планування міст і може бути використана при визначенні обсягів автомобілів по прибуттю та відправленню в транспортних районах (ТР) міста, що в подальшому дозволить визначити величину транспортних потоків між об'єктами транспортного тяжіння (ОТТ) при розробці та оцінці змін у вулично-дорожніх мережах (ВДМ). Цей спосіб може бути використаний для визначення обсягів відправлення (ОВ) та прибуття (ОП) транспортних засобів (ТЗ) по пунктах тяжіння. Одночасно з цим визначаються основні параметри транспортних потоків (ТП): кількість та моменти проїзду ТЗ контрольованої зони та перехрестя (транспортного вузла ТВ) в цілому, швидкості, тип і напрямки руху ТЗ, їх інтенсивність руху по кожній смузі контрольованого ТВ за будь-який проміжок часу. Відомі способи визначення кількості прибуваючих та виїжджаючих ТЗ з транспортних районів в більшості призводять до розбалансуванню ТП в вузлах, що пов'язано з неточними технічними засобами заміру та неврахуванням усіх параметрів ТП. При цьому замір параметрів ТП виконується на перехресті або на перегоні в різні проміжки часу, що підсилює розбалансування обсягів прибуття та відправлення автомобілів в ТВ. Одним з відомих способів вимірювання параметрів ТП є відеоспостереження, яке дозволяє аналізувати не тільки кількісні показнику руху автомобілів, але й якісні. Недоліком цього способу є необхідність використання певної кількості відеокамер для охоплення всіх підходів до ТВ міста, складна та тривала процедура обробки всього відеоматеріалу та його часова стиковка між собою, відсутність можливості оперативного використання цієї інформації у подальшому процесі керування ТП. Відомий спосіб вимірювання параметрів ТП на багатосмугових дорогах і магістралях, згідно з яким здійснюється сканування гостронаправленим лазерним променем у площині поперечного перерізу багатосмугової дороги спеціальним дискретним сканером по програмі таким чином, щоб забезпечити відхилення променя лазерного випромінювання в необхідне число положень (за кількістю смуг руху) для визначення параметрів ТП по кожній смузі руху і по дорозі в цілому (Авторське свідоцтво СРСР № 492211 А1). Недоліком цього способу і пристрою, що його реалізує, є низька точність визначення таких параметрів ТП, як швидкість і тип ТЗ через практично поперечний напрям сканування проїзної частини на багатосмуговій дорозі із застосуванням допплерівського способу визначення швидкості ТЗ. Крім того, даний спосіб і пристрій, що його реалізує, мають вузькі функціональні можливості, оскільки можуть бути використані для вимірювання зазначених у прототипі параметрів ТП в обмеженій зоні дороги і не дозволяють забезпечити вимірювання повного комплексу параметрів ТП на такому елементі ВДМ, як перехрестя (ТВ). Відомий спосіб визначення параметрів ТП у зоні перехрестя, згідно з яким здійснюється сканування гостроспрямованим лазерним променем зони перехрестя з точці над його геометричним центром конусним виглядом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області "стоп-ліній" всіх його підходів, а друге положення розгортки відповідає відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування. Оптичні фотоприймачі в процесі розгортки лазерного променя по одному з кіл послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. При цьому почергова з високою швидкістю зміна радіусів сканування дозволяє точно визначити час переміщень ТЗ в КЗ, швидкості руху ТЗ в зоні "стоп-ліній", моменти проїзду ТЗ контрольованої зони та перехрестя в цілому, а також дозволяє послідовно визначити довжину і тип ТЗ, напрямок руху, інтервали та інтенсивність по кожній смузі за будьяке фіксоване значення часу (Опис до патенту на корисну модель UA 71913 U від 25.07.2012 р., бюл. №14/2012). Цей спосіб є найбільш близьким до способу, що заявляється, і тому вибраний як найближчий аналог. Недоліком цього способу є вузькі функціональні можливості, оскільки він не дозволяє одночасно визначити такі параметри, як обсяги прибуття та відправлення ТЗ до міського транспортного району. Це, у свою чергу, обмежує можливість визначити величину транспортних потоків між ТР та забезпечити ефективне управління рухом між ТВ міста. В основу запропонованого способу поставлена задача розширення функціональних можливостей відомого способу та підвищення точності визначення ОВ та ОП ТЗ по ТР, що забезпечує можливість об'єктивного та раціонального збору інформації про обсяги прибуття та відправлення по всій транспортній мережі. При цьому можливо забезпечити чітке виконання умов збалансованості прибуття та відправлення ТЗ, що дозволяє підвищити точність при 1 UA 110729 C2 5 10 15 20 25 30 35 40 45 50 55 60 одночасному визначенні комплексу параметрів за всіма підходами та виходами багатосмугових доріг на перехресті та перегонах: швидкості, типу і напрямків руху ТЗ, їх послідовності, інтервалів руху та інтенсивності ТП по кожній смузі. Поставлена задача вирішується тим, що у запропонований спосіб покладено конусне покрокове сканування вузькоспрямованим лазерним променем інфрачервоного діапазону тимчасово всіх підходів і виходів ТВ та покрокове сканування вузькоспрямованим лазерним променем границь ТР по кожній з доріг, що ведуть до нього, що дає можливість забезпечити визначення комплексу вищезазначених параметрів ТП по кожній смузі руху в залежності від результатів сканування. На фіг. 1-3 представлені схеми, які розкривають основні відмінні особливості запропонованого способу і послідовність його дій. Відповідно до запропонованого способу, розгортка лазерного променя у центрі ТВ здійснюється скануючим блоком 1 (фіг. 2), який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає його геометричному центру. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя в області "стоп-ліній" всіх його підходів (фіг. 1). До складу скануючого блока входить оптичний відхилюючий пристрій (дискретний сканістор), що забезпечує відхилення осі лазерного променя в необхідне друге положення, при якому радіус кола на поверхні проїзної частини зменшується на задану величину (наприклад, на 1 м). Таким чином, скануючий блок на кожному наступному періоді сканування змінює розгортку з одної оптичної осі на іншу, описує в зоні перехрестя на його поверхні два концентричних кола з різницею радіусів (R1-R2=1м). Оптичні фотоприймачі 2П (ФПі) в процесі розгортки лазерного променя по одному з кіл послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. При цьому почергова з високою швидкістю зміни радіусів сканування (з R1 на R2 і навпаки) дозволяє точно визначити час переміщень ТЗ на дистанції (R1-R2) і швидкості руху ТЗ в зоні "стоп-ліній". Швидкість переміщення ТЗ і час його фіксації в площині одного з конусів розгортки дозволяють послідовно визначити довжину і тип ТЗ, напрямок, інтервали і інтенсивність руху по кожній смузі за будь-яке фіксоване значення часу. Збірінформації для визначення ОВ та ОП ТЗ здійснюється також на границях поділу сусідніх ТР на перегонах (дугах), які їх з'єднують у перерізах, що розділяють ці перегони на дві рівні частини (фіг. 2). Визначення параметрів ТП на перегонах між ТВ здійснюється покроковим скануванням вузьконаправленим лазерним променем інфрачервоного діапазону всіх смуг руху, як по смугах на підходах до ТР, так і по смугах зворотного напрямку руху з його виходів. Це досягається за рахунок розташування над перегоном на спеціальному кронштейні в заданому розрізі скануючого блока та фотоприймачів таким чипом, що при зміні положення кута нахилу променя у поперечному розрізі дороги на її поверхні утворюються дві паралельні лінії з дистанцією між ними в 1 м (фіг. 3). Аналогічно тому, як це відбувається при скануванні перехрестя, дискретний сканістор на кожному періоді сканування в реперній точці змінює положення осі променя і забезпечує можливість послідовного виміру на границі ТР таких параметрів, як швидкість переміщення ТЗ і час його фіксації в площині однієї з ліній розгортки, довжину і тип ТЗ, напрямок руху, інтервали і інтенсивність по кожній смузі за будь-яке фіксоване значення часу. При цьому фіксація кількості ТЗ на границі ТР та у ТВ відбувається тільки для тих ТЗ, що за час виміру повністю перетнули обидві лінії сканування. Для визначення обсягів прибуття та відправлення конкретного і-го ТР одночасно заміряють тип та кількість ТЗ (Ni-, Nі-j, Nj-μ, Nі-λ), які залишають цей ТВ, і які в'їжджають до нього (F -i, Fj-i, Fμ-i, Fλ-i) у всіх можливих k- напрямках (k = , j, μ, λ), а також тип та кількість ТЗ (Yi-, Yі-j, Yj-μ, Yі-λ, Y-i, Yji, Yμ-i, Yλ-i), що рухаються у різних напрямках та фіксуються на границях цього ТР з сусідніми ТР (у розрізах всіх перегонів, що скануються) за певний визначений час виміру. Потім за цей же час визначають різницю Yk-i-Fk-i між кількістю ТЗ Yk-i з урахуванням їх типу, що проїхали границю i-го ТР у розрізі k-го перегону та кількістю і типом ТЗ Fk-i, що перетнули вхід до ТВ в зоні стоп-лінії, а також різницю Ni-k-Yi-k між кількістю Nk-i та типом ТЗ, що виїхали з перехрестя по цьому перегону в напрямку k-го ТВ, та кількістю Yi-k та типом ТЗ, що зафіксовано на границі i-го з k-м ТР. При цьому різниця Ni-k-Yi-k та Yk-i-Fk-i, може приймати як позитивне, так й від'ємне значення, що визначає обсяги прибуття HP або відправлення НО. Якщо кількість ТЗ Yi-k менша ніж кількість Ni-k, це означає, що деяка кількість ТЗ або зупинилося на перегоні в зоні i-го ТР, або в'їхала на територію цього ТР для паркування по міжквартальних та інших невеликих вулицях, що примикають до цього перегону. Якщо кількість ТЗ Yi-k більша, ніж кількість Ni-k, це 2 UA 110729 C2 означає, що деяка кількість ТЗ відправилась з цієї частини перегону або виїхала на цей перегін за час виміру з інших примикань HPik Nik Yik, при Nik Yik 0; HO ik Nik Yik, при Nik Yik 0. 5 Аналогічним чином обсяги прибуття HPik та відправлення HO ik ТЗ для зворотного напрямку руху HPik Yki Fki, при Yk i Fk i 0; HO ik Yki Fki, при Yk i Fk i 0. Загальні значення OП та ОВ для і-го ТР визначаються як сума обсягів по всіх частинах перегонів, які примикають до цього вузла (фіг. 3) HPik 10 15 20 25 30 35 40 45 50 55 m m k 1 k 1 HPik,HO ik HO ik. Запропонований спосіб дає можливість по різниці між окремими видами ТЗ чітко визначити типи ТЗ в загальному ОП та ОВ за окремими смугами для різних напрямків руху. Фіксація часу перетину ліній сканування кожним окремим ТЗ та інформація про їх швидкість та тип дає змогу уникнути компенсації між ОП та ОВ по окремих перегонах в середині ТР. Визначення ОП та ОВ здійснюється одночасно та синхронізовано в єдиному обчислювальному центрі. Кінцеві значення ОП та ОВ визначаються за умови, що кількість ТЗ на перегонах між границею ТР і ТВ на момент початку та на момент закінчення виміру приблизно однакові і в розрахунках не враховуються, хоча сам спосіб має принципову можливість по інформації фіксації часу перетину ліній сканування ТЗ врахувати кількість та тип ТЗ, які у момент початку та закінчення виміру знаходились на перегонах в межах і-го ТР та перетнули зону сканування лише одного лазерного променя. На фіг. 4 представлена структурна схема пристрою, що розкриває основні відмінні риси запропонованого способу. Скануючий блок 1п має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують конусне покрокове сканування ТВ (зони перехрестя фіг. 2) за допомогою оптичного відхиляючого пристрою 5 (дискретного сканістора), що змінює положення кутів розгортки променя, яке здійснюється в реперній точці по черзі на кожному періоді сканування. Аналогічний устрій мають і скануючі блоки ll….lk, що розташовуються на границях ТР по всіх k перегонах між сусідніми ТВ, але сканування здійснюється у двох паралельних площинах таким чином, що при зміні положення кута нахилу променя у поперечному розрізі дороги на її поверхні утворюються дві паралельні лінії з дистанцією між ними в 1 м (фіг. 3). Зміна і чергування кутів нахилу розгортки необхідні для однозначного визначення положення ТЗ щодо кіл або ліній сканування на кожному періоді розгортки і визначення швидкості, типу, часу перетину ліній сканування кожним окремим ТЗ та напрямку руху ТЗ по кожній смузі. Для цього фотоприймачі 2п, 2l…2k (ФП0) реперного сигналу відповідного з блоків сканування 1П, 1l…1k у моменти проходження променів реперних точок видають сигнали на входи перетворювача 60 реперного сигналу та на входи відповідних дискретних сканісторів 5, які сигналами зі своїх виходів діють на вузли розгортки 4 та змінюють кути нахилу променів при переході реперної точки. Відбитий від ТЗ оптичний сигнал (при наявності ТЗ в зоні, що сканується) вловлюється відповідними фотоприймачами 2П (ФПl…ФПg) кожної смуги руху як на входах, так і на виходах ТВ, а також фотоприймачами 2l…2k (ФПl… ФПf), що розташовуються на границях ТР по всіх к перегонах і смугах руху. Перетворювачі 6п, 6l…6k сигналів фотоприймачів 2п, 2l…2k відповідних смуг руху перетворюють їх в імпульсно-цифрові коди, які вводяться в обчислювальний пристрій 7, де далі визначаються всі вищеперелічені параметри за будь-який визначений проміжок часу виміру. Сигнали з виходів відповідних блоків сканування 1 п, 1l…1k та перетворювача 60 фотоприймачів 2п, 2l…2k (ФП0) реперного сигналу подаються на відповідні входи обчислювального пристрою 7 для чіткого визначення положення кожного променя за смугами руху відносно реперної точки. Внаслідок того, що в обчислювальний пристрій закладається алгоритм, правила і константи, відповідні діапазони зміни інтервалів руху без затримки різних типів ТЗ між границями ТР і ТВ, а також в зоні самого перехрестя при всіляких змінах напрямків їх руху по смугах перехрестя, з'являється можливість одночасного та синхронного розрахунку всіх необхідних параметрів в 3 UA 110729 C2 5 10 єдиному обчислювальному центрі та більш точного визначення ОП та ОБ по усіх напрямках руху і ТР в цілому. Таким чином, запропонований спосіб дає можливість одержання найбільш повного і точного комплексу інформації про HP і НО в ТР, що виключає можливість розбалансування ТП в ТВ. Також перевагою запропонованого способу є те, що він дає змогу при фіксації значних HP за малий час визначити заторовий або передзаторовий стан на окремих підходах до ТВ, а його реалізацію можна здійснити з залученням набагато меншої кількості пристроїв заміру характеристик ТП, які розташовані в зоні контрольованих об'єктів. Вищезазначений спосіб дозволяє визначити повний комплекс параметрів ТП між ОТТ та більш ефективно забезпечити використання можливостей ВДМ при необхідності оперативного перерозподілу ТП та при плануванні заходів по маршрутній мережі міста. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 Спосіб визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району, обмеженого транспортними вузлами, оснований на скануванні гостроспрямованим лазерним променем зони транспортного вузла з точки над його геометричним центром конусним виглядом розгортки, причому оптична вісь першого з положень розгортки променя вибирається так, щоб він описував перше коло на проїжджій частині транспортного вузла в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється в реперній точці з високою швидкістю по черзі через кожен період сканування, подальшому прийомі відображених оптичних сигналів фотоприймачами і надалі перетворенні цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип та час пересування транспортних засобів в зоні стоп-лінії, напрямки їх руху по смугах, кількість транспортних засобів і час їх перетинання зони стоп-ліній по всіх смугах руху упродовж певного періоду часу, який відрізняється тим, що додатково сканування здійснюють по усіх перегонах на границях між сусідніми транспортними районами в поперечному перетині перегонів у двох паралельних площинах таким чином, що при зміні положення кута нахилу променя почергово на кожному періоді сканування на поверхні дороги утворюються дві паралельні лінії з певною дистанцією між ними, після чого здійснюється прийом відображених оптичних сигналів фотоприймачами і надалі перетворення цих сигналів в імпульсно-числові коди, за якими визначаються швидкість, тип, напрямки їх руху, кількість транспортних засобів і час перетинання ними ліній сканування по всіх смугах руху упродовж певного періоду часу, визначають різницю між кількістю транспортних засобів з урахуванням їх типу, що проїхали границю даного транспортного району у розрізі перегону та кількістю і типом транспортних засобів, що перетнули вхід до транспортного вузла в зоні стоп-лінії, а також різницю між кількістю та типом транспортних засобів, що виїхали з транспортного вузла по цьому перегону в напрямку сусіднього транспортного вузла або зовнішньої границі транспортного району, та кількістю і типом транспортних засобів, що зафіксовані на границі цього транспортного району, а загальне значення обсягів прибуття та відправлення транспортних засобів до транспортного району, обмеженого транспортними вузлами, визначають одночасно та синхронізовано в єдиному обчислювальному центрі як суму обсягів всіх частин перегонів, які примикають до цього транспортного району та транспортних вузлів, причому враховуються тільки ті транспортні засоби, що за час виміру повністю перетнули зони сканування обох лазерних променів. 4 UA 110729 C2 5 UA 110729 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюDenysenko Oleh Ivanovych
Автори російськоюДенисенко Олег Васильевич
МПК / Мітки
МПК: G08G 1/09
Мітки: району, прибуття, обсягів, транспортного, визначення, міського, відправлення, спосіб, транспортних, засобів
Код посилання
<a href="https://ua.patents.su/8-110729-sposib-viznachennya-obsyagiv-pributtya-ta-vidpravlennya-transportnikh-zasobiv-do-miskogo-transportnogo-rajjonu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району</a>
Спосіб визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району
Номер патенту: 92076
Опубліковано: 25.07.2014
Автори: Свічинський Станіслав Валерійович, Колій Олександр Сергійович, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: міського, визначення, прибуття, спосіб, обсягів, транспортних, відправлення, району, засобів, транспортного
Формула / Реферат:
Спосіб визначення обсягів прибуття та відправлення транспортних засобів до міського транспортного району, що оснований на скануванні гостроспрямованим лазерним променем зони транспортного вузла в точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки променя вибирається так, щоб він описував коло на проїжджій частині транспортного вузла в області стоп-ліній всіх його підходів, а друге...
Спосіб визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 88590
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: перехресті, засобів, затримок, транспортних, нерегульованому, визначення, спосіб
Формула / Реферат:
Спосіб визначення транспортних затримок на нерегульованому перехресті, оснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної за період вимірювання транспортної затримки в контрольованій зоні...
Спосіб визначення швидкості транспортних засобів у момент зіткнення
Номер патенту: 66462
Опубліковано: 17.05.2004
Автор: Огородніков Віталій Антонович
МПК: G01N 33/20, G01N 19/00
Мітки: засобів, транспортних, момент, спосіб, визначення, швидкості, зіткнення
Формула / Реферат:
Спосіб визначення швидкості транспортних засобів у момент зіткнення, який включає визначення енергетичних витрат на переміщення та на деформування і руйнування елементів конструкцій транспортних засобів після зіткнення, визначення лінійних швидкостей відкидання, еквівалентних цим енергетичним витратам, з яких знаходять шукані швидкості, який відрізняється тим, що для визначення енергетичних витрат на деформування і руйнування елементів...
Спосіб визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 105751
Опубліковано: 10.06.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/056, G08G 1/065
Мітки: затримок, транспортних, нерегульованому, визначення, спосіб, засобів, перехресті
Формула / Реферат:
Спосіб визначення транспортних затримок на нерегульованому перехресті, заснований на фіксації транспортних засобів, що в'їжджають у контрольовану зону і виїжджають з неї по їх задніх бамперах, із затримкою, рівною середньому часу проїзду транспортними засобами контрольованої зони, визначенні поточної довжини черги транспортних засобів в контрольованій зоні, визначенні сумарної транспортної затримки за період вимірювання в контрольованій зоні...
Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті
Номер патенту: 88659
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: засобів, визначення, пристрій, нерегульованому, затримок, транспортних, перехресті
Формула / Реферат:
Пристрій для визначення затримок транспортних засобів на нерегульованому перехресті, що містить скануючий блок, лазерний випромінювач, вузол розгортки, дискретний сканістор, фотоприймачі кожної смуги руху, перетворювач сигналів фотоприймачів і обчислювальний пристрій, при цьому вихід лазерного випромінювача підключений до входу вузла розгортки, другий вхід якого сполучений з виходом дискретного сканістора, а вихід вузла розгортки підключений...
Попередній патент: Формування прес-форми для сталевого лиття
Наступний патент: Знімний дах кузова залізничного вагона
Випадковий патент: Термозахисна композиція