Балістичний лазерний гравіметр з індукційно-динамічною катапультою для симетричного способу вимірювання прискорення вільного падіння
Номер патенту: 111307
Опубліковано: 11.04.2016
Автори: Омельченко Анатолій Васильович, Короткий Юрій Олексійович, Болюх Володимир Федорович, Вінніченко Олександр Іванович
Формула / Реферат
1. Балістичний лазерний гравіметр з індукційно-динамічною катапультою для симетричного способу вимірювання прискорення вільного падіння, що містить щонайменше одну силову плиту, вертикальні стійки, розташований зверху оптичний випромінювач і вакуумну камеру, усередині якої розташовані пробне тіло з оптичним кутовим відбивачем, силовий диск, що утримує пробне тіло, електромеханічну катапульту індукційно-динамічного типу, що складається з обмотки дискової форми, яка підключається до ємнісного накопичувача енергії, і коаксіально розташованого якоря, виконаного у вигляді диска з електропровідного матеріалу, нижня сторона якого повернена до верхньої сторони обмотки, а верхня сторона з'єднана з силовим диском, і взаємопов'язаного з пробним тілом направляючого конуса, форма бічних стінок якого співпадає з формою бічних стінок направляючої конусоподібної аксіальної виїмки внутрішнього каркаса обмотки, а в якорі виконано центральний отвір для направляючого конуса, який відрізняється тим, що вертикальні стійки розміщені всередині отворів на зовнішніх ділянках верхньої силової плити, що охоплюють встановлену на ній вакуумну камеру, взаємопов'язані з нижньою силовою плитою, яка за допомогою опор встановлена на масивній основі, і охоплені гвинтовими пружинами, які утримують верхню силову плиту щодо нижньої силової плити, до нижньої силової плити приєднаний охоплений феромагнітним сердечником коаксіальний магніт, в центральному отворі якого розміщений приєднаний до верхньої силової плити циліндричний рухливий елемент, що містить верхню і нижню феромагнітну ділянки, що розміщені симетрично щодо центральної площини магніту так, що між ними розташована немагнітна ділянка, причому циліндричний рухливий елемент немагнітною ділянкою з'єднаний з верхньою силовою плитою, оптичний приймально-випромінювальний пристрій розміщений на тринозі, що встановлена на масивній основі, обмотка індукційно-динамічної катапульти розміщена всередині феромагнітного сердечника, що охоплює її зовнішню бічну і нижню торцеву сторони, причому зовнішній діаметр феромагнітного сердечника співпадає з зовнішнім діаметром якоря.
2. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що гвинтові пружини розташовані між верхньою і нижньою силовими плитами та працюють на стискання.
3. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що гвинтові пружини з'єднують верхню силову плиту з кінцями виступаючих частин вертикальних стійок та працюють на розтягування.
4. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що феромагнітний сердечник обмотки виконаний з магнітодіелектрика.
5. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що феромагнітний сердечник обмотки виконаний з радіальними ізоляційними ділянками.
6. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що силовий диск і направляючий конус виконані з ізоляційного матеріалу у вигляді єдиного елемента.
7. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що коаксіальний магніт виконаний у вигляді електромагніта.
8. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що коаксіальний магніт виконаний у вигляді постійного магніту.
Текст
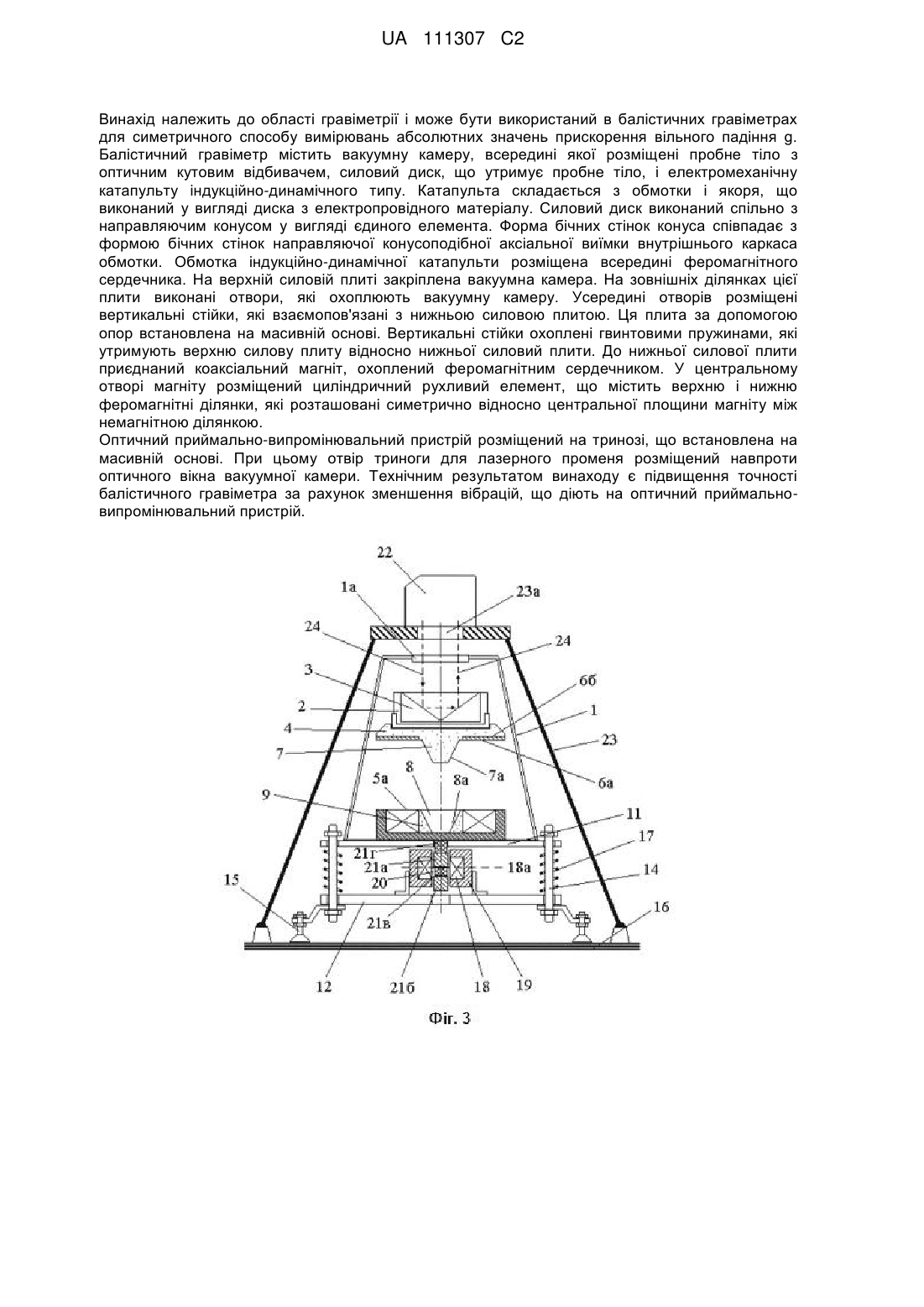
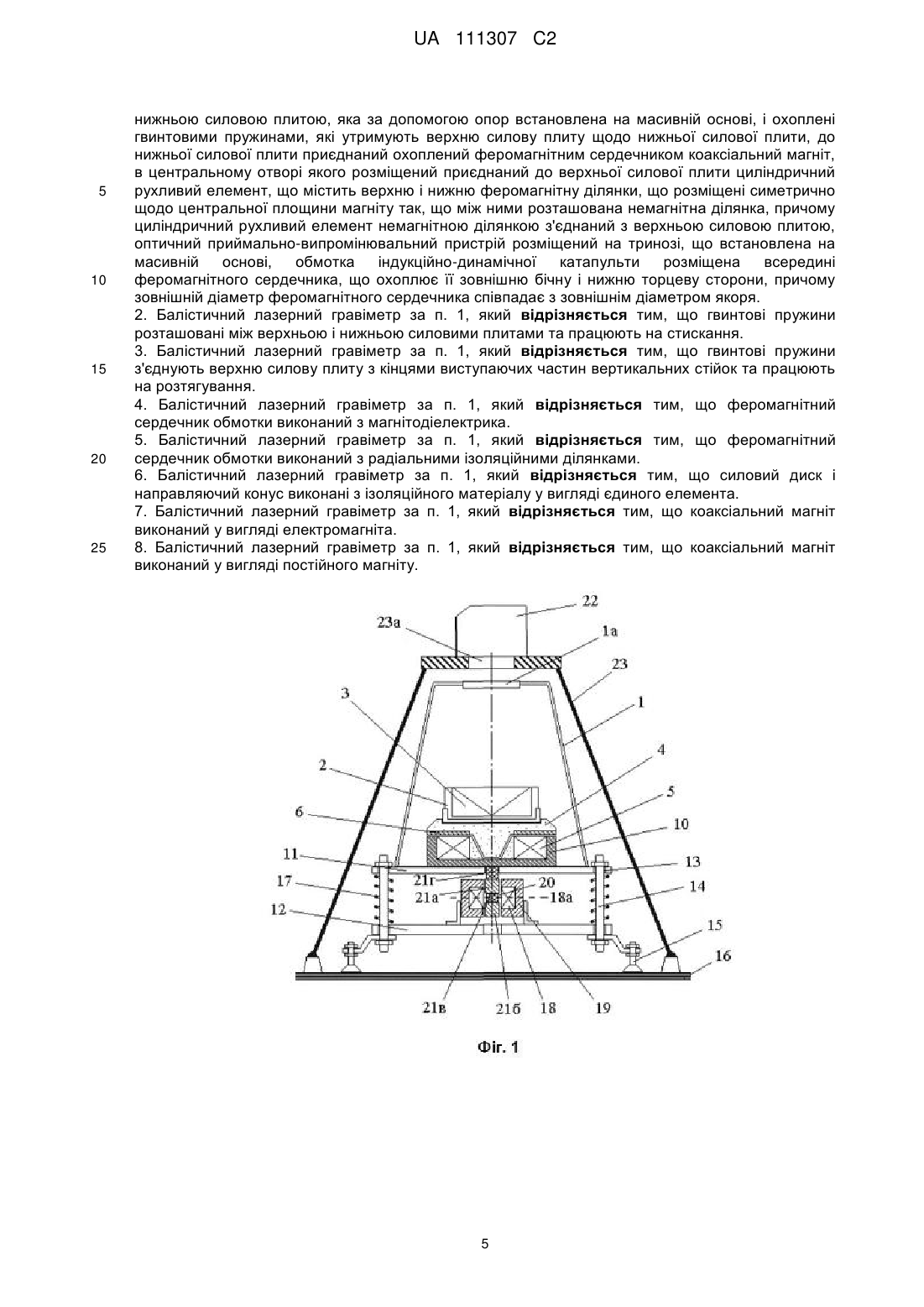
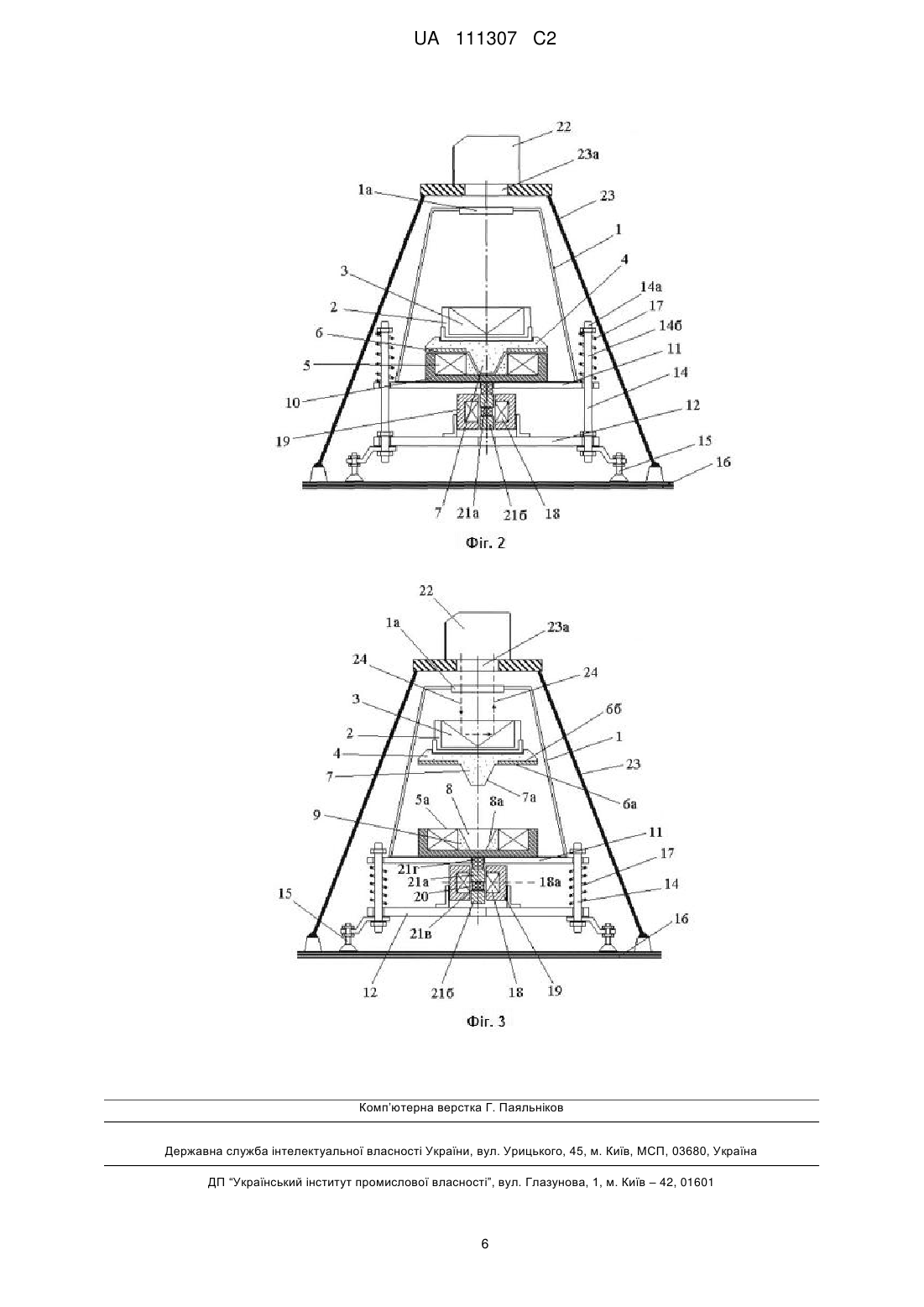
Реферат: UA 111307 C2 (12) UA 111307 C2 Винахід належить до області гравіметрії і може бути використаний в балістичних гравіметрах для симетричного способу вимірювань абсолютних значень прискорення вільного падіння g. Балістичний гравіметр містить вакуумну камеру, всередині якої розміщені пробне тіло з оптичним кутовим відбивачем, силовий диск, що утримує пробне тіло, і електромеханічну катапульту індукційно-динамічного типу. Катапульта складається з обмотки і якоря, що виконаний у вигляді диска з електропровідного матеріалу. Силовий диск виконаний спільно з направляючим конусом у вигляді єдиного елемента. Форма бічних стінок конуса співпадає з формою бічних стінок направляючої конусоподібної аксіальної виїмки внутрішнього каркаса обмотки. Обмотка індукційно-динамічної катапульти розміщена всередині феромагнітного сердечника. На верхній силовій плиті закріплена вакуумна камера. На зовнішніх ділянках цієї плити виконані отвори, які охоплюють вакуумну камеру. Усередині отворів розміщені вертикальні стійки, які взаємопов'язані з нижньою силовою плитою. Ця плита за допомогою опор встановлена на масивній основі. Вертикальні стійки охоплені гвинтовими пружинами, які утримують верхню силову плиту відносно нижньої силовий плити. До нижньої силової плити приєднаний коаксіальний магніт, охоплений феромагнітним сердечником. У центральному отворі магніту розміщений циліндричний рухливий елемент, що містить верхню і нижню феромагнітні ділянки, які розташовані симетрично відносно центральної площини магніту між немагнітною ділянкою. Оптичний приймально-випромінювальний пристрій розміщений на тринозі, що встановлена на масивній основі. При цьому отвір триноги для лазерного променя розміщений навпроти оптичного вікна вакуумної камери. Технічним результатом винаходу є підвищення точності балістичного гравіметра за рахунок зменшення вібрацій, що діють на оптичний приймальновипромінювальний пристрій. UA 111307 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області гравіметрії і може бути використаний в балістичних гравіметрах для вимірювань абсолютних значень прискорення вільного падіння g симетричним способом. Існують гравіметри для визначення абсолютного значення прискорення вільного падіння g шляхом вимірювання параметрів вільного польоту вертикально підкинутої вгору пробної маси (пробного тіла) [1]. Основними елементами такого гравіметра є: вакуумна камера з розміщеною у ній катапультою для підкидання пробного тіла у вигляді кутового оптичного відбивача, лазерний інтерферометр переміщень, електронно-рахункова система для обробки інтерференційного сигналу з виходу інтерферометра з метою обчислення g і управління роботою катапульти. Відомий балістичний гравіметр, в якому катапульта для підкидання пробного тіла виконана у вигляді якоря соленоїда і направляючих елементів для вертикального руху якоря [2]. Недоліком відомої катапульти з соленоїдним електромагнітним приводом є те, що при кидку пробного тіла має місце віддача, яка через механічний зв'язок впливає на відлікову систему лазерний інтерферометр, збуджуючи в ньому вертикальні коливання і вносячи похибки в результат вимірювання g. Відомий балістичний гравіметр для симетричного способу вимірювань прискорення вільного падіння g, що містить пробне тіло з оптичним відбивачем, вакуумну камеру, каретку штовхача з направляючими елементами, соленоїдний електромагнітний привід, що складається з якоря і котушки (обмотки), причому каретка штовхача зв'язана з якорем соленоїда рівноплечим пантографом, забезпечуючи при цьому зменшення віддачі катапульти при підкиданні пробного тіла [3]. У даному гравіметрі за рахунок зменшення віддачі катапульти при підкиданні пробного тіла забезпечується підвищення точності вимірювання прискорення вільного падіння g. Недоліком відомого технічного рішення є багатоступенева передача енергії від електричного джерела, що живить обмотку котушки, на вертикальне переміщення каретки з пробним тілом. Забезпечення заданого перетворення енергії здійснюється через переміщення якоря вниз, осьове розтискання і радіальне стискання пантографа щодо нерухомої осі, механічне взаємодія підшипників каретки і якоря з направляючими елементами. При осьовому розтисканні пантографа відбувається механічна взаємодія значного числа шарнірних елементів, як між собою, так і з нерухомою віссю, яка з'єднана з вакуумною камерою. Оскільки зазначений електро-, магнітно-механічний штовхач механічно пов'язаний з іншими нерухомими елементами, наприклад зі стінками вакуумної камери, то при роботі балістичний гравіметр піддається впливу різних механічних коливань, викликаних ударно-вібраційними процесами. Ці процеси нестаціонарні і викликають появу систематичної похибки вимірювань, яка може змінюватися у часі. Така систематична похибка не може бути зменшена проведенням повторних вимірювань, і подальше підвищення точності може бути досягнуто за рахунок зменшення (в ідеалі до нуля) кількості механічних взаємодій рухомих елементів з нерухомими елементами. Найбільш близьким за своєю технічною суттю до пропонованого винаходу є балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірювань прискорення вільного падіння [4]. Даний гравіметр містить пробне тіло з оптичним кутовим відбивачем, вакуумну камеру, штовхач пробного тіла, направляючі елементи, електромеханічний привід (катапульту) індукційно-динамічного типу. Катапульта містить обмотку дискової форми, що підключається до ємнісного накопичувача енергії, і коаксіально розташований якір, який виконаний у вигляді диска з електропровідного матеріалу, нижня сторона якого звернена до верхньої сторони обмотки, а верхня сторона з'єднана з силовим диском. Обмотка розташована в котушці з ізоляційного матеріалу так, що її зовнішня бічна і нижня торцева сторони охоплені суміжними сторонами котушки. Відомий балістичний гравіметр забезпечує підвищення точності за рахунок прямого перетворення електричної енергії ємнісного накопичувача енергії в кінетичну енергію пробного тіла з кутовим відбивачем, зменшення габаритів і підвищення регулювальних характеристик приводу. Однак при підкиданні пробного тіла виникає імпульс сили, який зі сторони обмотки через силову плиту діє на вакуумну камеру, зверху якої встановлений оптичний випромінювач. Вібрація оптичного випромінювача, що виникає при цьому, знижує точність вимірювання g гравіметром. При цьому демпфери, на яких розташована силова плита, не можуть повною мірою зменшити вібрації вакуумної камери. Крім того, вертикальні напрямні стійки, принаймні на початковій ділянці, механічно взаємодіють з підшипниками силового диска. Внаслідок такої механічної взаємодії також 1 UA 111307 C2 5 10 15 20 25 30 35 40 45 50 55 60 знижується точність гравіметра. На практиці необхідно вакуумну камеру вертикально встановлювати на силовий платі так, щоб не відбувалося механічного контакту підшипників зі стійками. У такому випадку вертикальні напрямні стійки є надлишковим елементом, що ускладнює конструкцію гравіметра. Оскільки при роботі гравіметра обмотка збуджує імпульсне магнітне поле, яке розсіюється в навколишній простір, у тому числі на металеві елементи, то точність вимірювання g гравіметром знижується, як за рахунок зміни магнітного поля Землі, так і за рахунок розсіювання в них теплової енергії. Задачею винаходу є підвищення точності балістичного гравіметра за рахунок зменшення вібрацій, що діють на оптичний приймально-випромінювальний пристрій. Поставлена задача вирішується за рахунок того, що у відомому балістичному гравіметрі з індукційно-динамічним приводом для симетричного способу вимірювань прискорення вільного падіння, що містить силову плиту, вертикальні стійки, розташований зверху оптичний випромінювач і вакуумну камеру, усередині якої розташовані пробне тіло з оптичним кутовим відбивачем, силовий диск, що утримує пробне тіло, електромеханічна катапульта індукційнодинамічного типу, що складається з обмотки дискової форми, яка підключається до ємнісного накопичувача енергії, і коаксіально розташований якір, виконаний у вигляді диска з електропровідного матеріалу, нижня сторона якого звернена до верхньої сторони обмотки, а верхня сторона з'єднана з силовим диском, і взаємопов'язаного з пробним тілом направляючого конуса, форма бічних стінок якого співпадає з формою направляючої конусоподібної аксіальної виїмки внутрішнього каркаса обмотки, а в якорі виконаний центральний отвір для направляючого конуса, відповідно до пропонованого винаходом, вертикальні стійки, розташовані всередині отворів на зовнішніх ділянках верхньої силовий плити, що охоплюють встановлену на ній вакуумну камеру, взаємопов'язані з нижньої силовий плитою, яка за допомогою опор встановлена на масивному підставі, і охоплені гвинтовими пружинами, які утримують верхню силову плиту щодо нижньої силовий плити, до нижньої силової плити приєднаний охоплений феромагнітним сердечником коаксіальний магніт, в центральному отворі якого розташований приєднаний до верхньої силової плити циліндричний рухливий елемент, що містить верхню і нижню феромагнітні ділянки, що розміщені симетрично щодо центральної площини магніту так, що між ними розташована немагнітна ділянка, причому циліндричний рухливий елемент немагнітною ділянкою з'єднаний з верхньою силовою плитою, оптичний приймально-випромінювальний пристрій розміщений на тринозі, що встановлена на масивній основі, обмотка індукційно-динамічної катапульти розміщена всередині феромагнітного сердечника, що охоплює її зовнішню бічну і нижню торцеву сторони, причому зовнішній діаметр феромагнітного сердечника співпадає зі зовнішнім діаметром якоря. Крім того, між верхньою і нижньою силовими плитами розміщені гвинтові пружини, що працюють на стискання. Крім того, верхня силова плита з'єднана з кінцями виступаючих частин вертикальних стійок за допомогою гвинтових пружин, що працюють на розтягування. Крім того, феромагнітний сердечник обмотки виконаний з магнітодіелектрика. Крім того, феромагнітний сердечник обмотки виконаний з радіальними ізоляційними ділянками. Крім того, силовий диск і направляючий конус виконані з ізоляційного матеріалу у вигляді єдиного елемента. Крім того, коаксіальний магніт виконаний у вигляді електромагніта. Крім того, коаксіальний магніт виконаний у вигляді постійного магніту. У пропонованому балістичному лазерному гравіметрі для симетричного способу вимірювання g з індукційно-динамічною катапультою збільшується точність за рахунок зменшення вібрацій оптичного приймально-випромінювального пристрою. Вібрації зменшуються за рахунок розміщення оптичного приймально-випромінювального пристрою на тринозі, яка встановлена на масивній основі. Крім того, на вказану масивну основу будуть впливати зменшені вібрації за рахунок того, що на нижню силову плиту будуть діяти протилежно спрямовані сили від гвинтових пружин і від коаксіального магніту. Зменшення вібрацій забезпечує безконтактне переміщення пробного тіла з силовим диском і якорем у вакуумній камері. Оскільки обмотка індукційно-динамічного катапульти розміщена всередині феромагнітного сердечника, що охоплює її зовнішню бічну і нижню торцеву сторони, то зменшується магнітне поле розсіювання та пов'язані з цим похибки вимірювання, а також збільшується ефективність індукційно-динамічного катапульти. Цим же задачам сприяє співпадіння зовнішнього діаметра феромагнітного сердечника із зовнішнім діаметром якоря. 2 UA 111307 C2 5 10 15 20 25 30 35 40 45 50 55 60 Виконання зазначеного феромагнітного сердечника з магнітодіелектрика або з радіальними ізоляційними ділянками істотно зменшує індуковані вихрові струми, що також сприяє вирішенню поставленої мети. Виконання силового диска і направляючого конуса з ізоляційного матеріалу у вигляді єдиного елемента робить конструкцію більш надійною і виключає вплив даних елементів на похибки вимірювання g. Виконання коаксіального магніту у вигляді електромагніта дозволяє забезпечити регулювання його силових характеристик, що забезпечують поліпшені показники демпфування. А виконання коаксіального магніту у вигляді постійного магніту робить конструкцію простішою і більш енергоефективною. На фіг. 1 схематично показаний балістичний лазерний гравіметр, в якому гвинтові пружини працюють на стискання; на фіг. 2 схематично показаний балістичний лазерний гравіметр, в якому гвинтові пружини працюють на розтягування; на фіг. 3 - балістичний гравіметр на фіг. 1 в момент вільного падіння пробного тіла. Балістичний лазерний гравіметр з індукційно-динамічною катапультою для симетричного способу вимірювання прискорення вільного падіння містить вакуумну камеру 1, усередині якої розташовані пробне тіло 2 з оптичним кутовим відбивачем 3, силовий диск 4, що утримує пробне тіло 2, і електромеханічну катапульту індукційно-динамічного типу. Дана катапульта складається з обмотки 5 дискової форми, яка підключається до ємнісного накопичувача енергії (на кресленні не показаний), і коаксіально розташованого якоря 6, виконаного у вигляді диска з електропровідного матеріалу, наприклад з міді. Нижня сторона 6а якоря 6 звернена до верхньої сторони 5а обмотки 5, а верхня сторона 6б з'єднана з силовим диском 4. Силовий диск 4 виконаний спільно з напрямних конусом 7 у вигляді єдиного елемента з ізоляційного матеріалу (фіг. 2). Форма бічних стінок 7а конуса 7 співпадає з формою бічних стінок 8а направляючої конусоподібної аксіальної виїмки 8 внутрішнього каркаса 9 обмотки 5 (фіг. 3). У якорі 6 виконано центральний отвір (на кресл. не позначено) для направляючого конуса 7. Обмотка 6 індукційно-динамічної катапульти розташована всередині феромагнітного сердечника 10, що охоплює її зовнішню бічну і нижню торцеву сторони, причому зовнішній діаметр феромагнітного сердечника співпадає з зовнішнім діаметром якоря 6. Зазначений феромагнітний сердечник може бути виконаний з магнітодіелектрика або з радіальними ізоляційними ділянками. У першому варіанті вихрові струми усередині сердечника усуваються повністю, а в другому варіанті вони багаторазово зменшуються. Гравіметр містить верхню 11 і нижню 12 силові плити. На верхній силовий плиті 11 закріплена вакуумна камера 1. На зовнішніх ділянках цієї плити 11 виконані отвори 13, які охоплюють вакуумну камеру 1. Усередині отворів 13 розташовані вертикальні стійки 14, які взаємопов'язані, наприклад з'єднані, з нижньої силовою плитою 12 (фіг. 12). Ця плита 12 за допомогою опор 15 встановлена на масивній основі 16. Вертикальні стійки 14 охоплені гвинтовими пружинами 17, які утримують верхню силову плиту 11 щодо нижньої силовий плити 12. На фіг. 1 між верхньою 11 і нижньою 12 силовими плитами розміщені гвинтові пружини 17, що працюють на стискання. На фіг. 2 верхню силова плита 11 з'єднана з кінцями 14а виступаючих частин 146 вертикальних стійок 14 за допомогою гвинтових пружин 17, що працюють на розтягування. До нижньої силової плити 12 приєднаний коаксіальний магніт 18, охоплений феромагнітним сердечником 19. Цей магніт 18 може бути виконаний у вигляді електромагніта або постійного магніту. У центральному отворі 20 коаксіального магніту 18 розміщений циліндричний рухливий елемент 21, що містить верхній 21а і нижній 21б феромагнітні ділянки, які розміщені симетрично щодо центральної площини 18а магніту між немагнітною ділянкою 21в. Циліндричний рухливий елемент 21 з'єднаний з верхньою силовий плитою 11 немагнітною ділянкою 21г. Оптичний приймально-випромінювальний пристрій 22 розташований на тринозі 23, що встановлена на масивній основі 16. При цьому отвір 23а триноги 23 для лазерного променю 24 розміщений навпроти оптичного вікна 1а вакуумної камери. Балістичний лазерний гравіметр з індукційно-динамічною катапультою для симетричного способу вимірювання прискорення вільного падіння працює наступним чином. У початковому стані між рухомим елементом 21 і коаксіальним магнітом 18 відсутні електромагнітні сили, оскільки верхній 21а і нижній 216 феромагнітні ділянки елемента 21 розміщені симетрично щодо центральної площини 18а магніту 18. 3 UA 111307 C2 5 10 15 20 25 30 35 40 За рахунок направляючого конуса 7 і аксіальної виїмки 8 внутрішнього каркаса 9 силовий диск 4 і обмотка 5 встановлені строго аксіально. Для початку процесу вимірювання прискорення вільного падіння g обмотка 5 індукційнодинамічної катапульти підключається до зарядженого ємнісного накопичувача. Імпульсний струм, що протікає у ній, за допомогою магнітного поля індукує в електропровідному якорі 6 вихровий струм. Електродинамічна сила відштовхування, що виникає при цьому між обмоткою 5 і якорем 6, штовхає пробне тіло 2 вгору. За рахунок наявності феромагнітного сердечника 10, у якого зовнішній діаметр співпадає з зовнішнім діаметром якоря 6, підвищується ефективність індукційно-динамічної катапульти і практично відсутні магнітні поля розсіювання. В процесі переміщення пробного тіла 2 випромінюється лазерний промінь 24 з оптичного приймально-випромінювального пристрою 22, проходячи через отвір 23а триноги 23 і оптичне вікно 1а вакуумної камери 1, взаємодіє з оптичним кутовим відбивачем 3 пробного тіла 2 (фіг. 3). При цьому здійснюється приймання відбитого променю 24 пристроєм 22 і вимірювання прискорення вільного падіння g симетричним способом. Під дією електродинамічної сили відштовхування обмотка 5 разом з феромагнітним сердечником 10 переміщається вниз. Верхня силова плита 11 по вертикальним стійкам 14 також переміщується вниз. При цьому гвинтові пружини 17, що працюють на стискання (фіг. 1), стискаються, а гвинтові пружини 17, що працюють на розтягнення (фіг. 2), розтягуються. Під дією гвинтових пружин на нижню силову плиту 12 діє збільшена сила, спрямована вниз. При використанні гвинтових пружин 17, що працюють на стискання, разом з верхньою силовий плитою 11 відбувається переміщення вниз і циліндричного рухомого елемента 21 (фіг. 3). При цьому верхня феромагнітна ділянка 21а цього елемента 21 наближається до центральної площини 18а коаксіального магніту, а нижня феромагнітна ділянка 21б віддаляється від цієї площини 18а. Внаслідок цього сила притягання зі сторони коаксіального магніту 18 на верхню феромагнітну ділянку 21а зростає, а на нижню феромагнітну ділянку 216 зменшується. Таким чином, між магнітом 18 і рухомим елементом 21 виникає електромагнітна сила притягання. Ця сила притягання, що діє на коаксіальний магніт 18, спрямована вгору. Оскільки магніт з'єднаний з нижньою силовою плитою 12, то зазначена сила притягання компенсує збільшену силу вниз, яка діє на плиту 12 зі сторони гвинтових пружин 17. Таким чином сила, яка діє зі сторони нижньої силової плити через опори 15 на масивну основу 16, практично зберігається. Оскільки на цій основі 16 встановлена тринога 23 з оптичним приймально-випромінювальним пристроєм 22, то сила дії на них практично не змінюється і не виникають суттєві вібрації пристрою 22. Це сприяє підвищенню точності вимірювання прискорення вільного падіння g. Джерела інформації: 1. Юзефович А.П., Огородова Л.В. Гравиметрия. - М.: Недра, 1980. 2. Агрегат 15В 166. Техническое описание ПБ 1.530.001 ТО, МО СССР, 1987. 3. Пат ФР № 2192024, МПК G01V7/14. Баллистический гравиметр для симметричного способа измерений. - Заявка № 2001120196/28, 18.07.2001. - Опубликовано 27.10.2002. 4. Пат РФ № 2491581, МПК G01V7/14. Баллистический гравиметр с индукционнодинамическим приводом для симметричного способа измерений ускорения свободного падения. - Заявка № 2011128560/28. - Заявл. 08.07.2011. - Опубл. 27.08.2013, Бюл. № 24 (прототип). 45 ФОРМУЛА ВИНАХОДУ 50 55 60 1. Балістичний лазерний гравіметр з індукційно-динамічною катапультою для симетричного способу вимірювання прискорення вільного падіння, що містить щонайменше одну силову плиту, вертикальні стійки, розташований зверху оптичний випромінювач і вакуумну камеру, усередині якої розташовані пробне тіло з оптичним кутовим відбивачем, силовий диск, що утримує пробне тіло, електромеханічну катапульту індукційно-динамічного типу, що складається з обмотки дискової форми, яка підключається до ємнісного накопичувача енергії, і коаксіально розташованого якоря, виконаного у вигляді диска з електропровідного матеріалу, нижня сторона якого повернена до верхньої сторони обмотки, а верхня сторона з'єднана з силовим диском, і взаємопов'язаного з пробним тілом направляючого конуса, форма бічних стінок якого співпадає з формою бічних стінок направляючої конусоподібної аксіальної виїмки внутрішнього каркаса обмотки, а в якорі виконано центральний отвір для направляючого конуса, який відрізняється тим, що вертикальні стійки розміщені всередині отворів на зовнішніх ділянках верхньої силової плити, що охоплюють встановлену на ній вакуумну камеру, взаємопов'язані з 4 UA 111307 C2 5 10 15 20 25 нижньою силовою плитою, яка за допомогою опор встановлена на масивній основі, і охоплені гвинтовими пружинами, які утримують верхню силову плиту щодо нижньої силової плити, до нижньої силової плити приєднаний охоплений феромагнітним сердечником коаксіальний магніт, в центральному отворі якого розміщений приєднаний до верхньої силової плити циліндричний рухливий елемент, що містить верхню і нижню феромагнітну ділянки, що розміщені симетрично щодо центральної площини магніту так, що між ними розташована немагнітна ділянка, причому циліндричний рухливий елемент немагнітною ділянкою з'єднаний з верхньою силовою плитою, оптичний приймально-випромінювальний пристрій розміщений на тринозі, що встановлена на масивній основі, обмотка індукційно-динамічної катапульти розміщена всередині феромагнітного сердечника, що охоплює її зовнішню бічну і нижню торцеву сторони, причому зовнішній діаметр феромагнітного сердечника співпадає з зовнішнім діаметром якоря. 2. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що гвинтові пружини розташовані між верхньою і нижньою силовими плитами та працюють на стискання. 3. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що гвинтові пружини з'єднують верхню силову плиту з кінцями виступаючих частин вертикальних стійок та працюють на розтягування. 4. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що феромагнітний сердечник обмотки виконаний з магнітодіелектрика. 5. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що феромагнітний сердечник обмотки виконаний з радіальними ізоляційними ділянками. 6. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що силовий диск і направляючий конус виконані з ізоляційного матеріалу у вигляді єдиного елемента. 7. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що коаксіальний магніт виконаний у вигляді електромагніта. 8. Балістичний лазерний гравіметр за п. 1, який відрізняється тим, що коаксіальний магніт виконаний у вигляді постійного магніту. 5 UA 111307 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюA ballistic laser gravimeter with induction-dynamic launcher for symmetrical measurement of absolute values of gravitational acceleration g
Автори англійськоюBoliukh Volodymyr Fedorovych, Omelchenko Anatolii Vasyliovych, Vinnichenko Oleksandr Ivanovych, Korotkyi Yurii Ivanovych
Назва патенту російськоюБаллистический лазерный гравиметр с индукционно-динамической катапультой для симметричного способа измерения ускорения свободного падения
Автори російськоюБолюх Владимир Федорович, Омельченко Анатолий Васильевич, Винниченко Александр Иванович, Короткий Юрий Алексеевич
МПК / Мітки
МПК: G01V 7/14
Мітки: способу, вимірювання, індукційно-динамічною, падіння, прискорення, катапультою, вільного, лазерний, симетричного, гравіметр, балістичний
Код посилання
<a href="https://ua.patents.su/8-111307-balistichnijj-lazernijj-gravimetr-z-indukcijjno-dinamichnoyu-katapultoyu-dlya-simetrichnogo-sposobu-vimiryuvannya-priskorennya-vilnogo-padinnya.html" target="_blank" rel="follow" title="База патентів України">Балістичний лазерний гравіметр з індукційно-динамічною катапультою для симетричного способу вимірювання прискорення вільного падіння</a>
Балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірювань прискорення вільного падіння
Номер патенту: 96904
Опубліковано: 12.12.2011
Автори: Вінніченко Олександр Іванович, Болюх Володимир Федорович
МПК: G01V 7/14
Мітки: індукційно-динамічним, симетричного, прискорення, гравіметр, вільного, балістичний, способу, приводом, вимірювань, падіння
Формула / Реферат:
1. Балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірів прискорення вільного падіння, який містить пробне тіло з оптичним кутовим відбивачем, вакуумну камеру, штовхач пробного тіла, напрямні елементи, електромеханічний привод, який складається з коаксіально розташованих якоря і котушки з обмоткою, який відрізняється тим, що використаний електромеханічний привод індукційно-динамічного типу, який виконаний у...
Навчальний прилад для визначення прискорення вільного падіння
Номер патенту: 32712
Опубліковано: 26.05.2008
Автор: Кондратьєв Денис Ігорович
МПК: G09B 23/08
Мітки: навчальний, вільного, прилад, прискорення, визначення, падіння
Формула / Реферат:
1. Навчальний прилад для визначення прискорення вільного падіння, що містить стійку, секундомір, схему керування з електромагнітом, джерело живлення й металеву кульку, який відрізняється тим, що стійка виконана у вигляді порожнистої труби, укріпленої на основі, при цьому зверху стійки розташований електромагніт, а внизу стійки розташовано фотореле, крім того, схема керування включає цифровий електронний секундомір.2. Навчальний прилад...
Балістичний гравіметр

Номер патенту: 98058
Опубліковано: 10.04.2012
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович, Остапчук Анна Анатоліївна
Мітки: гравіметр, балістичний
Формула / Реферат:
Балістичний гравіметр, що містить пробне тіло (1), пристрій (10) утримання пробного тіла в початковому положенні, першу систему (4) вимірювання шляху та часу вільного руху пробного тіла, який відрізняється тим, що пробне тіло (1) виконано у формі шару з магнітними властивостями, першу систему вимірювання шляху та часу вільного руху пробного тіла виконано у вигляді прозорої трубки (2) на нерухомій основі з котушками (3), додатково введено...
Спосіб створення невагомості контейнера на стенді вільного падіння та пристрій для здійснення способу
Номер патенту: 105964
Опубліковано: 10.07.2014
Автори: Бондар Михайло Анатолійович, Ільін Геннадій Іванович, Порубаймех Володимир Ілліч, Демченко Сергій Андрійович
МПК: B64G 7/00, G01M 99/00
Мітки: вільного, падіння, невагомості, пристрій, способу, створення, стенді, контейнера, спосіб, здійснення
Формула / Реферат:
1. Спосіб створення невагомості контейнера на стенді вільного падіння шляхом захоплення контейнера електромеханічним замком, підйому контейнера на задану висоту, звільнення зв'язків і наступного його скидання, який відрізняється тим, що в процесі вільного падіння контейнера створюють силу тяги, рівну за величиною і протилежно спрямовану силі аеродинамічного опору контейнера за рахунок подачі газореактивного струменя, діючого уздовж...
Гравіметр для вимірювання абсолютного значення прискорення сили ваги
Номер патенту: 6921
Опубліковано: 31.03.1995
Автор: Федоровський Борис Миколайович
МПК: G01V 7/00
Мітки: гравіметр, абсолютного, вимірювання, прискорення, ваги, значення, сили
Формула / Реферат:
(57) . Гравиметр для измерения абсолютного значения ускорения силы тяжести, содержащий пробное тело, выполненное в виде уголкового светоотражателя и помещенное в вакуумную камеру, интерферометр, систему измерения пути и времени свободного движения пробного тела, блок управления измерениями и катапульту для подбрасывания пробного тела вертикально вверх на заданную высоту, состоящую из катушки соленоида и сердечника, связанного с...
Попередній патент: Анти-vegf/dll4-імуноглобулін з подвійними варіабельними доменами і його застосування
Наступний патент: Спосіб модифікування сплавів електричним струмом
Випадковий патент: Освітлювач-підігрівач