Балістичний гравіметр
Номер патенту: 98058
Опубліковано: 10.04.2012
Автори: Остапчук Анна Анатоліївна, Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович

Формула / Реферат
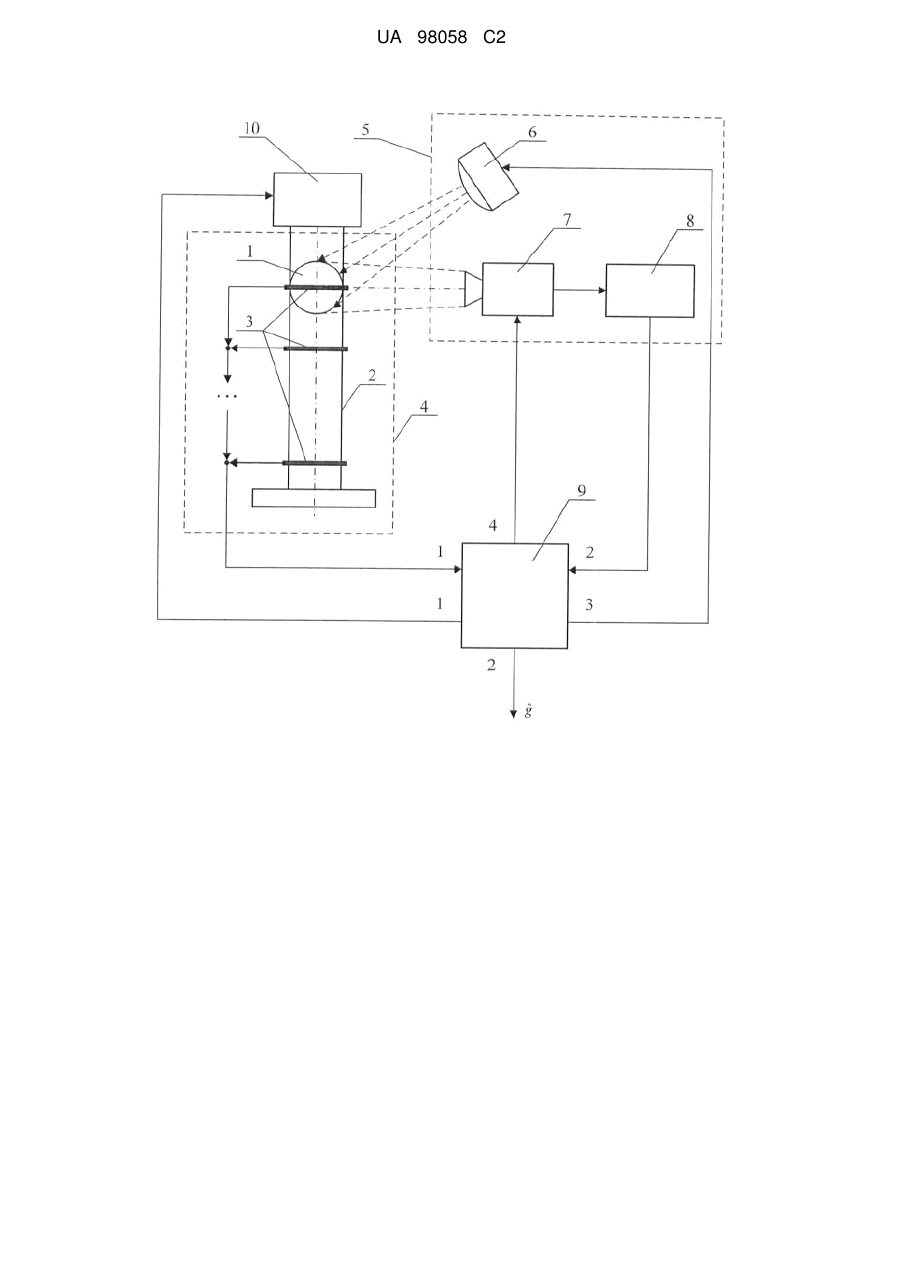
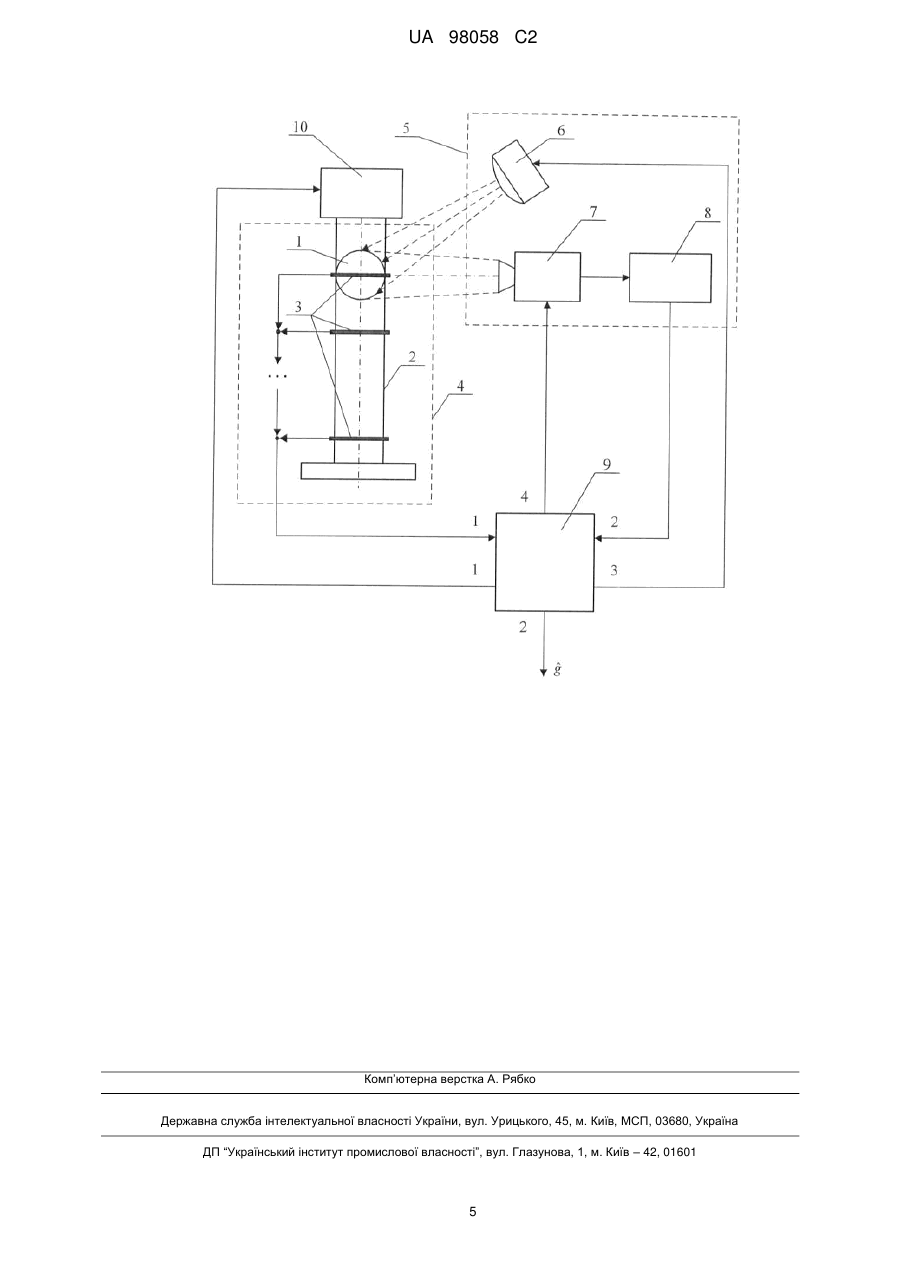
Балістичний гравіметр, що містить пробне тіло (1), пристрій (10) утримання пробного тіла в початковому положенні, першу систему (4) вимірювання шляху та часу вільного руху пробного тіла, який відрізняється тим, що пробне тіло (1) виконано у формі шару з магнітними властивостями, першу систему вимірювання шляху та часу вільного руху пробного тіла виконано у вигляді прозорої трубки (2) на нерухомій основі з котушками (3), додатково введено цифрову електронну обчислювальну машину (ЕОМ) (9) та другу систему (5) вимірювання шляху та часу вільного руху пробного тіла, яка містить джерело (6) імпульсного освітлення, відеокамеру (7) та блок (8) апроксимації траєкторії руху пробного тіла, причому виходи котушок (3) підключено до першого входу цифрової ЕОМ (9), перший вихід якої підключено до входу пристрою (10) утримання пробного тіла в початковому положенні, третій вихід цифрової ЕОМ (9) підключено до входу джерела (6) імпульсного освітлення, вихід якого оптично пов'язаний з пробним тілом (1), яке оптично пов'язане із входом відеокамери (7), вихід якої підключено до входу блоку (8) апроксимації траєкторії руху пробного тіла, вихід якого підключено до другого входу цифрової ЕОМ (9), четвертий вихід якої підключено до входу керування відеокамери (7), причому другий вихід цифрової ЕОМ (9) є виходом балістичного гравіметра.
Текст
Реферат: Винахід належить до гравіметричного вимірювання в геодезії, геології, будівництві. Балістичний гравіметр містить пробне тіло, пристрій утримання пробного тіла в початковому положенні, першу систему вимірювання шляху та часу вільного руху пробного тіла, цифрову електронну обчислювальну машину (ЕОМ) та другу систему вимірювання шляху та часу вільного руху пробного тіла. Пробне тіло виконано у формі шару з магнітними властивостями. Першу систему вимірювання шляху та часу вільного руху пробного тіла виконано у вигляді прозорої трубки на нерухомій основі та котушок. Друга система вимірювання шляху та часу вільного руху пробного тіла містить джерело імпульсного освітлення, відеокамеру та блок апроксимації траєкторії руху пробного тіла. Виходи котушок підключено до першого входу цифрової ЕОМ, перший вихід якої підключено до входу пристрою утримання пробного тіла в початковому положенні. Третій вихід цифрової ЕОМ підключено до входу джерела імпульсного освітлення, вихід якого оптично пов'язаний з пробним тілом, яке оптично пов'язане із входом відеокамери, вихід якої підключено до входу блоку апроксимації траєкторії руху пробного тіла, вихід якого підключено до другого входу цифрової ЕОМ, четвертий вихід якої підключено до входу керування відеокамери. Другий вихід цифрової ЕОМ є виходом балістичного гравіметра. Винахід дозволяє підвищити точність вимірювань абсолютного значення прискорення сили тяжіння. UA 98058 C2 (12) UA 98058 C2 UA 98058 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області гравіметричних вимірювань і може бути використаний в геодезії, геології, будівництві. Найбільш близьким за сукупністю суттєвих ознак до винаходу є відомий балістичний гравіметр [1], що вибрано як прототип. Спільними суттєвими ознаками балістичного гравіметра-прототипу і балістичного гравіметра-винаходу є те, що вони містять пробне тіло, пристрій утримання пробного тіла в початковому положенні, першу систему вимірювання шляху та часу вільного руху пробного тіла. Проте, на відміну від балістичного гравіметра-винаходу, балістичний гравіметр-прототип містить тільки блоки, що забезпечують вимірювання шляху та часу вільного руху пробного тіла. Результати вимірювання шляху та часу вільного руху пробного тіла, що є початковими даними для вимірювання абсолютних значень прискорення сили тяжіння (ПСТ), містять похибки. Оскільки абсолютні значення ПСТ обчислюються шляхом алгебраїчної обробки цих результатів у блоці керування вимірюваннями, то вихідний сигнал балістичного гравіметра-прототипу містить трансформовані похибки [2, 3], обумовлені похибками початкових даних для обчислення. Крім того, у гравіметрі-прототипі відсутні засоби підвищення точності результатів вимірювання абсолютних значень ПСТ на основі вказаних результатів вимірювань, що здійснюються з похибками. Таким чином, результати вимірювань абсолютних значень ПСТ у балістичному гравіметріпрототипі мають недостатню точність. В основу винаходу поставлена задача удосконалення балістичного гравіметра, щоб забезпечити підвищення точності вимірювання абсолютних значень ПСТ балістичним гравіметром. Поставлена задача вирішується шляхом того, що пробне тіло виконано у формі шару з магнітними властивостями, першу систему вимірювання шляху та часу вільного руху пробного тіла виконано у вигляді прозорої трубки на нерухомій основі та котушок, додатково введено цифрову електронну обчислювальну машину (ЕОМ) та другу систему вимірювання шляху та часу вільного руху пробного тіла, яка містить джерело імпульсного освітлення, відеокамеру та блок апроксимації траєкторії руху пробного тіла, причому виходи котушок підключено до першого входу цифрової ЕОМ, перший вихід якої підключено до входу пристрою утримання пробного тіла в початковому положенні, третій вихід цифрової ЕОМ підключено до входу джерела імпульсного освітлення, вихід якого оптично пов'язаний з пробним тілом, яке оптично пов'язане із входом відеокамери, вихід якої підключено до входу блоку апроксимації траєкторії руху пробного тіла, вихід якого підключено до другого входу цифрової ЕОМ, четвертий вихід якої підключено до входу керування відеокамери, причому другий вихід цифрової ЕОМ є виходом балістичного гравіметра. Для підвищення точності вимірювань абсолютних значень ПСТ до складу балістичного гравіметра-винаходу введено цифрову ЕОМ і другу систему вимірювання шляху та часу вільного руху пробного тіла. Підвищення точності вимірювань забезпечується завдяки комплексуванню першої та другої систем вимірювання шляху та часу вільного руху пробного тіла [4, с. 376-380; 5, с. 65-68]. При цьому забезпечується компенсація похибок вимірювань шляхом алгоритмічної обробки в цифровій ЕОМ результатів вимірювань, що отримані від першої та другої систем вимірювання шляху та часу вільного руху пробного тіла. Для забезпечення роботи вказаних систем та підвищення точності вимірювань абсолютних значень ПСТ пробне тіло виконано у формі шару з магнітними властивостями. Цей шар під дією сили тяжіння може переміщуватися у прозорій трубці, що встановлена на нерухомій основі. На прозорій трубці також закріплено котушки, підключені до першого входу цифрової ЕОМ. До складу гравіметра-винаходу також входять джерело імпульсного освітлення та відеокамера, призначена для спостереження за рухом пробного тіла у прозорій трубці. Все це забезпечує можливість вимірювань шляху та часу вільного руху пробного тіла двома незалежними системами. Перша система вимірювання шляху та часу вільного руху пробного тіла призначена для формування імпульсів електрорушійної сили (ЕРС) завдяки використанню магнітних властивостей пробного тіла та котушок на прозорій трубці. Ці імпульси визначають час проходження пробним тілом фіксованих відстаней від пристрою утримання пробного тіла в початковому положенні до кожної з котушок. Друга система вимірювання шляху та часу вільного руху пробного тіла призначена для вимірювання з високою точністю просторового положення пробного тіла у фіксовані моменти часу завдяки використанню прозорої трубки. Це реалізується за допомогою блоку апроксимації траєкторії руху пробного тіла, джерела імпульсного освітлення та відеокамери. 1 UA 98058 C2 5 10 15 20 25 30 35 В результаті цього на другому виході цифрової ЕОМ маємо сформований сигнал, що містить високоточний результат вимірювання абсолютних значень ПСТ. Таким чином, балістичний гравіметр-винахід забезпечує суттєве підвищення точності результатів вимірювання абсолютних значень ПСТ. Суть винаходу пояснюється кресленням, на якому зображено структурну схему балістичного гравіметра. Балістичний гравіметр містить пробне тіло 1, першу 4 та другу 5 системи вимірювання шляху та часу вільного руху пробного тіла, цифрову ЕОМ 9 та пристрій 10 утримання пробного тіла в початковому положенні. Перша система 4 вимірювання шляху та часу вільного руху пробного тіла містить прозору трубку 2, яка встановлена на нерухомій основі, та котушки 3. Друга система 5 вимірювання шляху та часу вільного руху пробного тіла містить джерело 6 імпульсного освітлення, відеокамеру 7 та блок 8 апроксимації траєкторії руху пробного тіла. Пробне тіло 1 виконано у формі шару з магнітними властивостями. Виходи котушок 3 підключено до першого входу цифрової ЕОМ 9, третій вихід якої підключено до входу джерела 6 імпульсного освітлення. Вихід джерела 6 імпульсного освітлення оптично пов'язаний з пробним тілом 1, яке оптично пов'язане із входом відеокамери 7, вихід якої підключено до входу блоку 8 апроксимації траєкторії руху пробного тіла. Вихід блоку 8 апроксимації траєкторії руху пробного тіла підключено до другого входу цифрової ЕОМ 9. До входу керування відеокамери 7 підключено четвертий вихід цифрової ЕОМ 9, другий вихід якої є виходом балістичного гравіметра. Перший вихід цифрової ЕОМ 9 підключено до входу пристрою 10 утримання пробного тіла у початковому положенні. Балістичний гравіметр-винахід працює таким чином. Перед початком вимірювань пробне тіло 1 закріплюємо у пристрої 10 утримання пробного тіла у початковому положенні. З першого виходу цифрової ЕОМ 9 на вхід пристрою 10 утримання пробного тіла у початковому положенні надходить сигнал, по якому цей пристрій відпускає пробне тіло 1. Воно починає рухатися вниз по прозорій трубці 2 під дією ПСТ. Оскільки пробне тіло 1 виконано у формі шару з магнітними властивостями, то при його проходженні повз котушки 3 в них наводиться ЕРС. З виходів котушок 3 на перший вхід цифрової ЕОМ 9 надходить електричний сигнал, що складається з ряду послідовних імпульсів напруги, кожен з яких обумовлений виникненням ЕРС у одній з котушок 3. Загальна кількість імпульсів напруги дорівнює кількості котушок Nк. Часові затримки (і=1,…, Nк) кожного з імпульсів напруги відносно моменту початку руху пробного тіла ˆ 1 пропорційні абсолютному значенню g ПСТ та відстаням хі від пристрою 10 утримання пробного тіла у початковому положенні до котушок 3. Оскільки в момент часу t0=0 початкова координата пробного тіла х0=0, а його початкова швидкість v0=0, то його поточну координату в момент часу t визначаємо за формулою [6]: xt x 0 v 0 t gt 2 gt 2 . 2 2 (1) З формули (1) отримуємо вираз для визначення абсолютного значення ПСТ на основі часових затримок імпульсів напруги з котушок 3: ˆ g1i 2x i , i=1,…, Nк. ˆ 2 i (2) Усереднюючи значення, обчислені за формулою (2), отримуємо оцінку абсолютного значення ПСТ: N 1 кˆ . ˆ g1 g1i Nк i 1 40 45 50 (3) Оцінка (3) абсолютного значення ПСТ формується за допомогою першої системи 4 вимірювання шляху та часу вільного руху пробного тіла і цифрової ЕОМ 9. Вказані блоки утворюють перший канал вимірювань абсолютного значення ПСТ у балістичному гравіметрівинаході. Друга система 5 вимірювання шляху та часу вільного руху пробного тіла разом з цифровою ЕОМ 9 утворює другий канал вимірювання абсолютних значень ПСТ. У цьому каналі цифрова ЕОМ 9 керує роботою джерела 6 імпульсного освітлення та відеокамерою 7. Таке керування здійснюється сигналами, що надходять з третього та четвертого виходів цифрової ЕОМ 9 на вхід джерела 6 імпульсного освітлення та вхід керування відеокамери 7 відповідно. При цьому відеокамера 7 формує зображення пристрою 10 утримання пробного тіла у початковому положенні, прозорої трубки 2 та самого пробного тіла 1. Завдяки імпульсному освітленню на кожному зображенні зафіксовано декілька послідовних положень пробного тіла 1, що відповідають моментам спрацювання джерела 6 імпульсного освітлення. 2 UA 98058 C2 Блок 8 апроксимації траєкторії руху пробного тіла за зображенням, що надійшло від цифрової ЕОМ 9, визначає поточні координати x j центра мас пробного тіла 1, що відповідають ˆ 5 моментам часу j·Тдж, де Тдж - період генерування імпульсів освітлення джерелом 6 імпульсного освітлення, j=1…N, де N - кількість положень пробного тіла 1, зафіксованих на зображенні відеокамерою 7. Координати x j вимірюються відносно початкового положення х0=0 пробного ˆ 10 тіла 1 у пристрої 10 утримання пробного тіла у початковому положенні. Оскільки результати вимірювань містять похибки Δхj [7, с. 91-99], то ˆ x j x j x j , (4) де xj - точне значення координат центра мас пробного тіла 1 у моменти часу j·Тдж. Далі блок 8 апроксимації траєкторії руху пробного тіла визначає параметр траєкторії руху пробного тіла 1 у прозорій трубці 2. Згідно формул (1) та (4) отримуємо: xj ˆ g2 j Tдж 2 (5) , 2 де g 2 - оцінка абсолютного значення ПСТ, що отримана у другому каналі вимірювань ˆ балістичного гравіметра-винаходу, та є параметром траєкторії руху пробного тіла 1. На основі формули (5) та результатів вимірювань поточних координат x j можна скласти ˆ функціонал J N ˆ x j j 1 ˆ g2 j Tдж 2 min . 2 (6) 15 Мінімізуючи вираз (6) за методом найменших квадратів [8, с. 255-260], визначаємо оцінку g 2 ˆ абсолютного значення ПСТ у другому вимірювальному каналі балістичного гравіметравинаходу. Процедура апроксимації за методом найменших квадратів [8, с. 255-260] дозволяє виключити вплив випадкових похибок вимірювань координат x j на оцінку g 2 абсолютного ˆ ˆ 20 значення ПСТ. Для подальшого підвищення точності балістичного гравіметра-винаходу потрібно об'єднати результати вимірювань абсолютних значень ПСТ, що отримані у першому та другому вимірювальних каналах цього гравіметра. Таке об'єднання результатів виконує цифрова ЕОМ 9, на перший та другий входи якої надходять сигнали від котушок 3 та з виходу блоку 8 апроксимації траєкторії руху пробного тіла 1 відповідно. Теоретичною основою вказаного об'єднання результатів вимірювань є методи комплексування декількох засобів, що одночасно вимірюють деяку фізичну величину [4, с. 376380]. Наприклад, результати вимірювань абсолютного значення ПСТ, обчислені згідно формул (3) і (6), можна об'єднати таким чином: 25 ˆ ˆ g g2 . ˆ g 1 2 30 35 40 45 (7) Остаточна оцінка g абсолютного значення ПСТ, що обчислена згідно формули (7), має підвищену точність та надходить на другий вихід цифрової ЕОМ 9. Цей вихід і є виходом всього балістичного гравіметра-винаходу. Таким чином, балістичний гравіметр-винахід має підвищену точність. За допомогою діючого макету балістичного гравіметра-винаходу було проведено ряд дослідів. У діючому макеті як пристрій 10 утримання пробного тіла у початковому положенні використано електромагніт, керований від цифрової ЕОМ. Як ця цифрова ЕОМ 9 використана електронна обчислювальна машина типу Pentium 4-1,7 ГГц. Першу систему 4 вимірювання шляху та часу вільного руху пробного тіла виконано у вигляді прозорої трубки 2 з пластику, що має діаметр 65 мм та довжину 0,60 м. Кількість котушок 3 дорівнює трьом (Nк=3). Кожна котушка 3 містить по 10 витків мідного дроту діаметром 0,45 мм. Як пробне тіло 1 використано металевий шар діаметром 20 мм з магнітними властивостями. В діючому макеті використано цифрову відеокамеру Sony DCR-TRV940 як відеокамеру 7. Джерело 6 імпульсного освітлення виконано на основі ультраяскравих світлодіодів, керованих цифровою ЕОМ 9 через допоміжний блок (на схемі не показано) на основі мікроконтролера К1816ВЕ51. Блок 8 апроксимації траєкторії руху пробного тіла реалізований цифровою ЕОМ типу Pentium 4-1,7 ГГц як частина її програмно-алгоритмічного забезпечення. 3 UA 98058 C2 5 10 15 20 25 За результатами досліджень на діючому макеті було встановлено, що точність вимірювання абсолютного значення ПСТ при використанні тільки першого каналу вимірювань (подібно до балістичного гравіметра-прототипу) становить 117 мкГал. При використанні двох каналів вимірювання абсолютного значення ПСТ (згідно балістичного гравіметра-винаходу) точність підвищується до 47 мкГал. Таким чином, балістичний гравіметр-винахід забезпечує суттєве підвищення точності вимірювань абсолютних значень ПСТ. Джерела інформації: 1. Пат. 6921 С1 Україна, МПК G01V 7/14. Гравіметр для вимірювання абсолютного значення прискорення сили ваги / Федоровський Б.М.; заявник і власник патенту Федоровський Б.М. №94301260, заявл. 02.03.93; опубл. 31.03.95, Бюл. №1. 2. Смолов В.Б. Специализированные процессоры. Итерационные алгоритмы и структуры. / В.Б. Смолов, В.Д. Байков. - Радио и связь, 1985. - 288 с. 3. Соренков Э.И. Точность вычислительных устройств и алгоритмов. / Соренков Э.И., Телига А.И., Шаталов А.С. - М.: Машиностроение, 1976. - 200 с. 4. Самотокін Б.Б. Лекції з теорії автоматичного керування: Навчальний посібник для студентів вищих навчальних закладів. - Житомир: ЖІТІ, 2001. - 508 с. 5. Артемьев В.М. Справочное пособие по методам исследования радиоэлектронных следящих систем: Книга / Высшая школа, 1984. - 168 с. 6. Лазарев Ю.Ф. Кінематика. Додатки [Електронний ресурс]: навчально-довідковий матеріал / Ю.Ф. Лазарев, НТУУ "КПІ". - Електронні текстові дані. - К.: НТУУ "КШ", 2003. - Назва з екрану. Режим доступу http://www.library.kpi.ua/html/arh_ntuu/yura/index.html. 7. Горелик С.Л. Телевизионные измерительные системы / С.Л. Горелик, Б.М. Кац, В.И. Киврин. - М.: Связь, 1980. - 168 с. 8. Яцук В.О. Методи підвищення точності вимірювань: Підручник / В.О. Яцук, П.С. Малачівський. - Л.: Бескид Біт, 2008. - 368 с. ФОРМУЛА ВИНАХОДУ 30 35 40 Балістичний гравіметр, що містить пробне тіло (1), пристрій (10) утримання пробного тіла в початковому положенні, першу систему (4) вимірювання шляху та часу вільного руху пробного тіла, який відрізняється тим, що пробне тіло (1) виконано у формі шару з магнітними властивостями, першу систему вимірювання шляху та часу вільного руху пробного тіла виконано у вигляді прозорої трубки (2) на нерухомій основі з котушками (3), додатково введено цифрову електронну обчислювальну машину (ЕОМ) (9) та другу систему (5) вимірювання шляху та часу вільного руху пробного тіла, яка містить джерело (6) імпульсного освітлення, відеокамеру (7) та блок (8) апроксимації траєкторії руху пробного тіла, причому виходи котушок (3) підключено до першого входу цифрової ЕОМ (9), перший вихід якої підключено до входу пристрою (10) утримання пробного тіла в початковому положенні, третій вихід цифрової ЕОМ (9) підключено до входу джерела (6) імпульсного освітлення, вихід якого оптично пов'язаний з пробним тілом (1), яке оптично пов'язане із входом відеокамери (7), вихід якої підключено до входу блоку (8) апроксимації траєкторії руху пробного тіла, вихід якого підключено до другого входу цифрової ЕОМ (9), четвертий вихід якої підключено до входу керування відеокамери (7), причому другий вихід цифрової ЕОМ (9) є виходом балістичного гравіметра. 4 UA 98058 C2 Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюBallistic gravimeter
Автори англійськоюBezvesilna Olena Mykolaivna, Podchashynskyi Yurii Oleksandrovych, Ostapchuk Anna Anatoliivna
Назва патенту російськоюБаллистический гравиметр
Автори російськоюБезвесильна Елена Николаевна, Подчашинский Юрий Александрович, Остапчук Анна Анатолиевна
МПК / Мітки
Мітки: гравіметр, балістичний
Код посилання
<a href="https://ua.patents.su/7-98058-balistichnijj-gravimetr.html" target="_blank" rel="follow" title="База патентів України">Балістичний гравіметр</a>
Балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірювань прискорення вільного падіння
Номер патенту: 96904
Опубліковано: 12.12.2011
Автори: Вінніченко Олександр Іванович, Болюх Володимир Федорович
МПК: G01V 7/14
Мітки: індукційно-динамічним, приводом, балістичний, симетричного, падіння, гравіметр, вільного, вимірювань, прискорення, способу
Формула / Реферат:
1. Балістичний гравіметр з індукційно-динамічним приводом для симетричного способу вимірів прискорення вільного падіння, який містить пробне тіло з оптичним кутовим відбивачем, вакуумну камеру, штовхач пробного тіла, напрямні елементи, електромеханічний привод, який складається з коаксіально розташованих якоря і котушки з обмоткою, який відрізняється тим, що використаний електромеханічний привод індукційно-динамічного типу, який виконаний у...
Гравіметр
Номер патенту: 78620
Опубліковано: 10.04.2007
Автори: Коробійчук Ігор Вацлавович, Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна, Нечай Сергій Олексійович
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, що містить двоступеневий динамічно настроюваний гіроскоп (1), до якого підключений датчик (4) моменту, ротор (2) та датчик (3) кута повороту, який відрізняється тим, що центр мас ротора (2) двоступеневого динамічно настроюваного гіроскопа (1) зміщений відносно осі його обертання, введено фільтр (5) нижніх частот і пристрій (6) обчислення вихідного сигналу гравіметра, причому вхід датчика (3) кута повороту підключено до виходу...
Гравіметр
Номер патенту: 86005
Опубліковано: 25.03.2009
Автори: Безвесільна Олена Миколаївна, Подчашинський Юрій Олександрович, Коробійчук Ігор Вацлавович
МПК: G01V 7/00, G01C 19/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, що містить двостепеневий динамічно настроюваний гіроскоп (1), на корпусі якого встановлені датчик (3) кута повороту і датчик (4) моменту, який відрізняється тим, що центр мас ротора (2) двоступеневого динамічно настроюваного гіроскопа (1) зміщений у напрямку, перпендикулярному до осі його обертання, додатково введений пристрій (5) обчислення і компенсації похибок вимірювань, обумовлених викривленням траєкторії руху ротора (2),...
Цифровий гравіметр для абсолютних вимірів прискорення сили ваги
Номер патенту: 88060
Опубліковано: 10.09.2009
Автори: Гнатенко Володимир Григорович, Омельченко Анатолій Васильович, Мірошниченко Олег Миколайович, Карпінський Юрій Олександрович, Сидоренко Горіслав Степанович
МПК: G01V 7/00
Мітки: вимірів, абсолютних, гравіметр, цифровий, прискорення, ваги, сили
Формула / Реферат:
Цифровий гравіметр для абсолютних вимірювань прискорення сили ваги, що містить послідовно розміщені датчик переміщень, перетворювач, обчислювальну систему, а також систему індикації, який відрізняється тим, що перетворювач з'єднаний з обчислювальною системою через узгоджувальний пристрій, який складається з послідовно з'єднаних регулюючого і високошвидкісного підсилювачів, вихід якого з'єднаний з швидкісним аналоговим перетворювачем (ШАП),...
Гравіметр
Номер патенту: 53478
Опубліковано: 15.01.2003
Автори: Тулупов Дмитро Григорович, Безвесільна Олена Миколаївна, Меншикова Катерина Вікторівна, Бобруйко Євген Ігоревич, Нечай Сергій Олексійович
МПК: G01V 7/00
Мітки: гравіметр
Формула / Реферат:
Гравіметр, виконаний на основі триступеневого гіроскопа, що містить ротор, центр мас якого зміщений вздовж осі обертання відносно осей карданового підвісу, датчики кута та датчики моменту для реєстрації та компенсації відхилень ротора, який відрізняється тим, що ротор приєднаний до привідного вала через пружні торсіони, перпендикулярні до осі привідного вала, та карданові кільця, при цьому обертання привідного вала забезпечує двигун, кутова...
Попередній патент: Планетарний редуктор
Наступний патент: Спосіб перевезення вантажів у великотоннажних контейнерах рейковим контейнеровозом
Випадковий патент: Спосіб лікування ретроградної еякуляції