Спосіб визначення фазових коефіцієнтів регульованого перехрестя
Формула / Реферат
Спосіб визначення фазових коефіцієнтів регульованого перехрестя, оснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптичну вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшують на певну задану величину, при цьому зміну положень розгортки здійснюють в реперній точці з високою швидкістю по черзі через кожен період сканування, а другий промінь розгортки формують у одній площині з першим, але зі зміщенням на півперіоді по колу розгортки, в подальшому приймають відображені оптичні сигнали фотоприймачами і надалі перетворюють ці сигнали в імпульсно-числовий код, за яким визначають швидкість, тип та час пересування транспортних засобів в зоні стоп-лінії, а далі послідовно реальні значення коефіцієнтів приведення до легкового автомобіля, кількість транспортних засобів у черзі у приведених одиницях, час пересування черги, починаючи з моменту перетинання стоп-лінії переднім бампером першого в черзі транспортного засобу і закінчуючи моментом проходження над стоп-лінією заднього бампера останнього в черзі автомобіля та значення потоків насичення по всіх смугах руху упродовж одного циклу регулювання, який відрізняється тим, що кути нахилу оптичних осей другого променя, як і першого, змінюють по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході контрольованої зони зменшувався на певну задану величину, визначають тип, склад та довжину черг транспортних засобів, які збираються в контрольованій зоні по кожній смузі на сигнали світлофора, що забороняють рух, а потім напрямки руху транспортних засобів по кожній смузі руху, їх інтенсивності, а також фазові коефіцієнти по кожній смузі руху, як відношення відповідних інтенсивностей до значень потоків насичення.
Текст
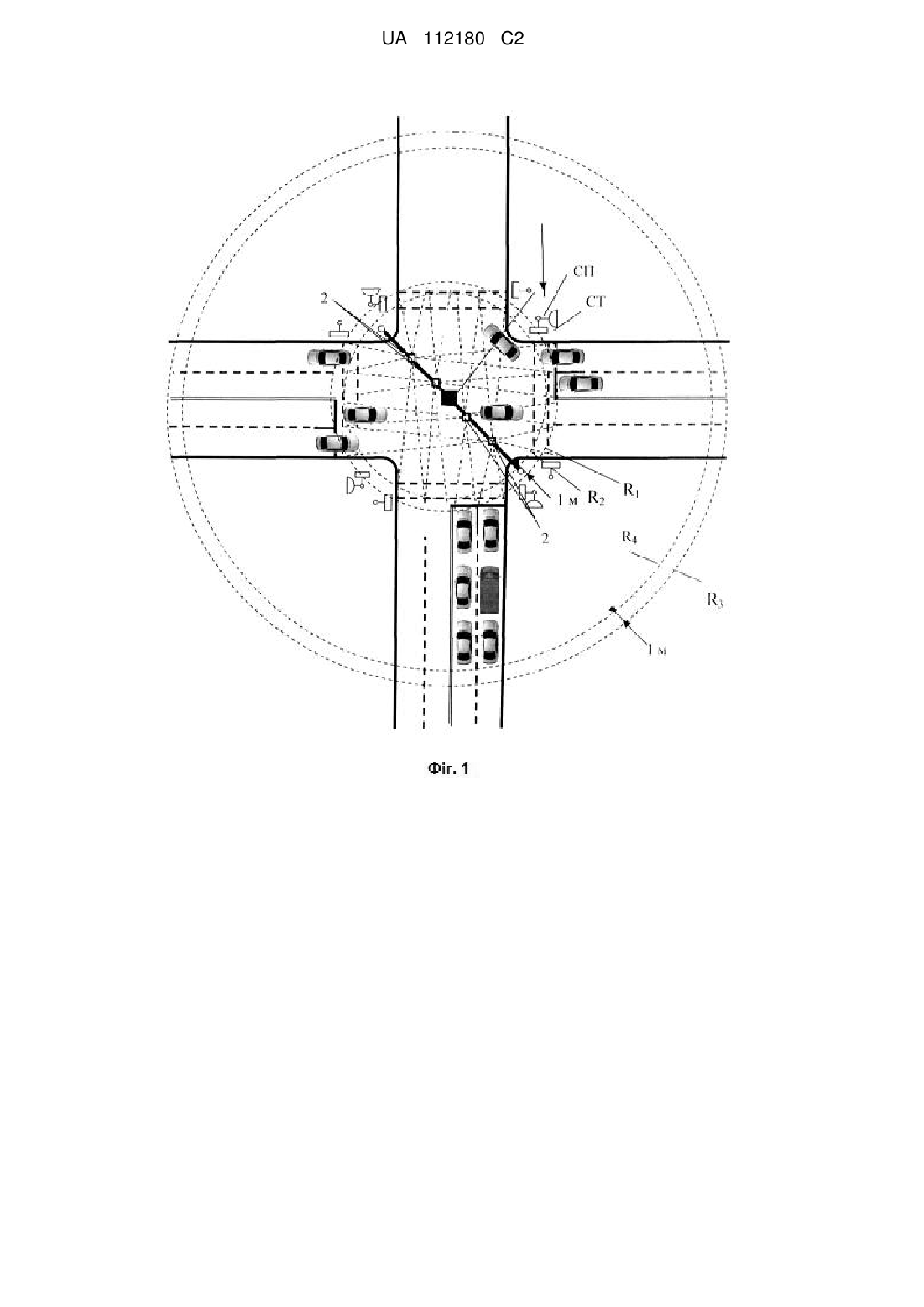
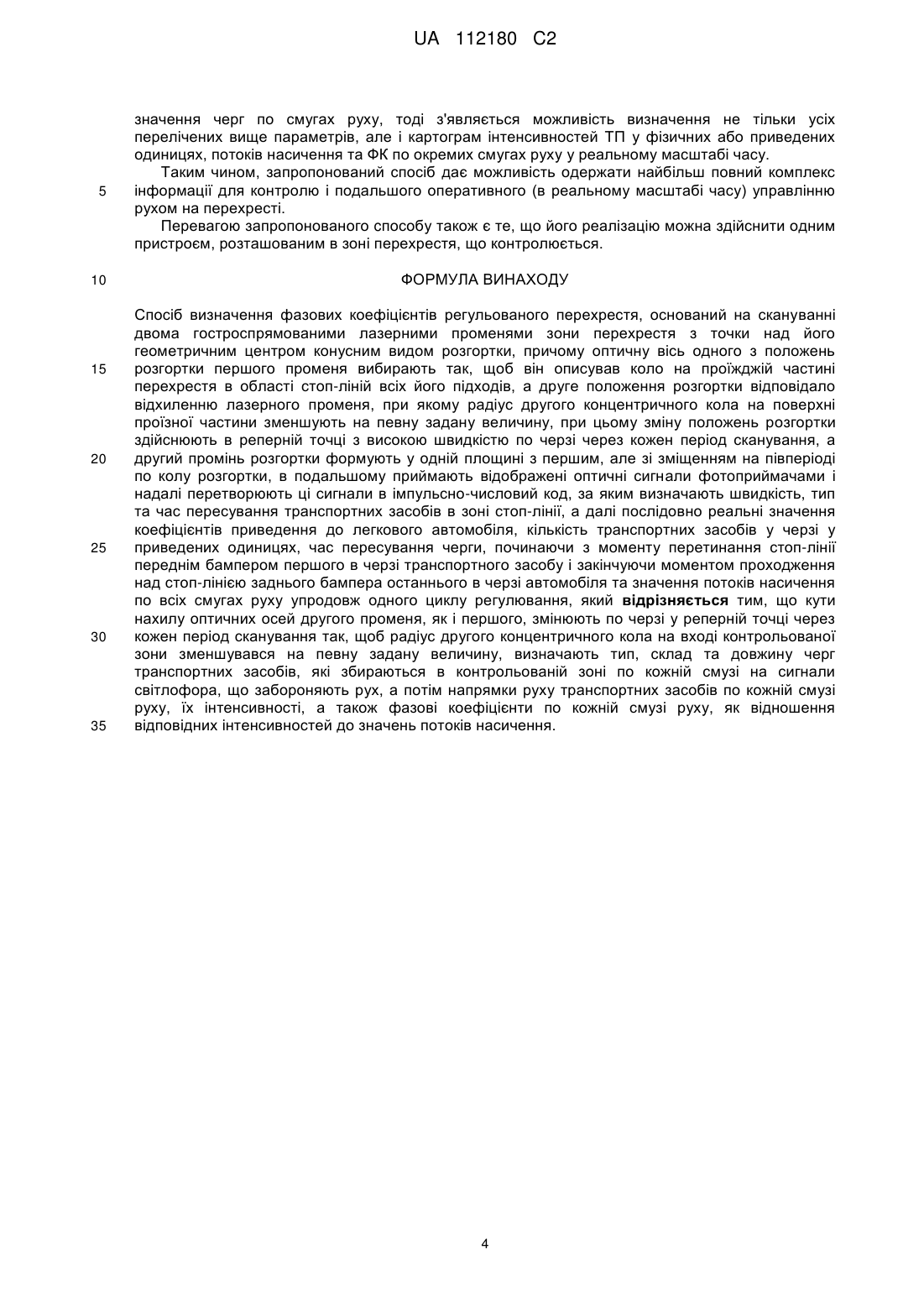
Реферат: Спосіб визначення фазових коефіцієнтів регульованого перехрестя належить до систем регулювання дорожнього руху (ДР) і може бути використано при розробці агрегатної системи засобів керування ДР, при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть ВДМ, а також для підвищення ефективності керування рухом транспорту на регульованих перехрестях. Спосіб оснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому другий промінь формується у одній площині з першим, але зі зміщенням на півперіоді по колу розгортки, а оптична вісь першого променя, що формує вихідну межу контрольованої зони в області стоп-ліній, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину. Кути нахилу оптичних осей другого променя, як і першого, змінюють по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході контрольованої зони зменшувався на певну задану величину, що дозволяє чітко визначити тип, склад та довжину черг транспортних засобів, які збираються в контрольованій зоні по кожній смузі руху. Спосіб дозволяє визначити кількість ТЗ у черзі у приведених одиницях, час пересування черги, значення потоків насичення та фазових коефіцієнтів по всіх смугах руху упродовж одного циклу регулювання. UA 112180 C2 (12) UA 112180 C2 UA 112180 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до систем регулювання дорожнього руху (ДР) і може бути використаний при розробці агрегатної системи засобів керування ДР, при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть ВДМ, а також для підвищення ефективності керування рухом транспорту на регульованих перехрестях. Цей спосіб може бути використаний для одночасного визначення основних параметрів транспортних потоків (ТП): моменту проїзду транспортним засобом (ТЗ) контрольованої зони (КЗ) та перехрестя в цілому, швидкості, типу і напрямку руху ТЗ, їх інтенсивності руху по кожній смузі за будь-який проміжок часу, інтервалів рухів між ТЗ, а також потоків насичення по кожній смузі регульованого перехрестя. Відомий спосіб визначення потоків насичення регульованого перехрестя, оснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїзній частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину, при цьому зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування. Другий промінь розгортки формується у одній площині з першим, але зі зміщенням на півперіоді по колу розгортки, яку здійснюють, починаючи з зовнішнього кола для першого променя і поступово покроково розширяють коло сканування з заданою величиною кроку зміною положень кутів розгортки в реперній точці на кожному періоді до моменту, коли надійно визначиться кінець найбільшої за протяжністю черги ТЗ по смугах на підходах до перехрестя, на які у даний час діє сигнал світлофора, що забороняє рух, і потім відбувається повернення цього променя в початкове положення та багаторазове повторення цього процесу для визначення кількості ТЗ у черзі по кожній смузі руху на момент зміни сигналу на зелений або на момент початку руху ТЗ. Оптичні сигнали, відбити від транспортних засобів на підходах та виходах перехрестя, приймаються відповідними фотоприймачами і перетворюються в імпульсно-числовий код, за яким обчислюються швидкість і тип ТЗ, інтенсивність і інтервали між ТЗ, що дозволяє послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобілю, кількість ТЗ у черзі у приведених одиницях, час пересування черги, починаючи з моменту перетинання стоп-лінії переднім бампером першого в черзі ТЗ і закінчуючи моментом проходження над стоп-лінією заднього бампера останнього в черзі автомобіля та значення потоків насичення по всіх смугах руху упродовж одного циклу регулювання (Рішення про видачу деклараційного патенту на корисну модель № 15653/ЗУ/13 від 17.07.2013, за заявкою № u 201304382 від 08.04.2013). Цей спосіб є найбільш близьким до способу, що заявляється, і тому вибраний як найближчий аналог. Недоліком цього способу є вузькі функціональні можливості, оскільки він не дозволяє одночасно визначити такий важливий параметр ТП, як фазові коефіцієнти (ФК) по напрямках або по смугах руху та низька точність визначення типу, складу і довжини черги транспортних засобів у контрольованій зоні. Це, у свою чергу, обмежує можливість визначення у реальному масштабі часу оптимальних параметрів циклу світлофорного регулювання та знижує ефективність керування рухом транспорту на регульованих перехрестях. В основу запропонованого способу поставлена задача розширення функціональних можливостей при одночасному визначенні комплексу параметрів за всіма підходами та виходами багатосмугових доріг на регульованому перехресті. Поставлена задача вирішується тим, що у запропонований спосіб покладено конусне покрокове сканування одночасно двома вузькоспрямованими лазерними променями інфрачервоного діапазону тимчасово всіх підходів і виходів перехрестя, що дає можливість сформувати вхідні і вихідні межі КЗ та забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. На Фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого способу і послідовність його дій. Відповідно до запропонованого способу, розгортка лазерного променя здійснюється скануючим блоком 1, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїзній частині перехрестя (R1) в області «стопліній» всіх його підходів. До складу скануючого блока входить оптичний відхиляючий пристрій (дискретний сканістор), який забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R2) на поверхні проїзної частини зменшується на 1 UA 112180 C2 5 10 15 20 25 задану величину (наприклад, на 1 м). Таким чином, блок сканування на кожному наступному періоді сканування змінює розгортку першого лазерного променя з однієї оптичної осі на іншу та описує в зоні стоп-ліній на поверхні перехрестя два концентричні кола з різницею радіусів (R1R2=1 м) та формує вихідну межу КЗ. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки (див. Фіг. 2) і формує вхідну межу КЗ. Цей промінь, як і перший, за допомогою відповідного дискретного сканістора 52 на кожному наступному періоді сканування змінює одну оптичну ось розгортки (з радіусом кола R3 на проїзній частині перехрестя) на іншу (з радіусом кола R4) і формує два концентричних кола з різницею радіусів R3-R4=1 м. Оптичні фотоприймачі 2 (ФПі) в процесі розгортки лазерних променів 81 та 82 по одному з кіл на вході і виході КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. Фіксацію ТЗ, що в'їжджають в КЗ, здійснюють по їх задніх бамперах при пересіченні одного з кіл (наприклад R3), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з радіуса R3 на R4 і навпаки) визначається момент в'їзду, швидкість, довжина, тип, кількість і послідовність ТЗ, що реально в'їхали в КЗ по кожній смузі руху за період вимірювань. Радіус R3, що формує вхідну межу КЗ, бажано вибирати за такої умови, щоб він перевищував найбільш можливу чергу ТЗ, яка може збиратися по одній із смуг руху на сигнал світлофора, що забороняє дорожній рух. Наявність подвійного сканування на вході (R3, R4) КЗ дає можливість більш точно визначити тип ТЗ, склад ТП та кількість ТЗ m j у черзі по кожній j-й смузі руху на підходах до перехрестя на момент зміни сигналу світлофора на зелений або на момент початку руху перших у черзі ТЗ. Інформація про довжину, тип та час пересування ТЗ в зоні «стоп-ліній» дозволяє послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобілю K ПРi як відношення величини середнього значення часового інтервалу t ві проїзду КЗ конкретним типом 30 ТЗ до величини середнього значення часового інтервалу t лі проїзду цієї зони легковим автомобілем: KПРi tві t лі (1) Вимірювання такого комплексу параметрів в зоні перехрестя дозволяє також визначити картограму інтенсивностей руху ТЗ за невеликі періоди часу (цикл світлофорного регулювання) як у фізичних, так і у приведених одиницях: NПРj KПР1N1 KПР2N2 KПРiNi , (2) де NПРj - інтенсивності руху ТЗ у приведених до легкового автомобіля одиницях по j-й смузі 35 руху; Ni - число транспортних засобів типу і у потоці; 40 K ПРi - коефіцієнт приведення ТЗ типу і до легкового автомобіля. Все це істотно розширює функціональні можливості способу та підвищує точність при визначенні оптимальних параметрів поточних значень елементів світлофорного циклу. Потім, за результатами сканування виходу КЗ першим променем, визначають час проходження Tj цих черг, що здійснюють роз'їзд ТЗ на «зелений» сигнал світлофора, а значення потоку насичення MHj по кожній смузі розраховують за формулою: MHj 3600 m j Tj , (3) де m j - число приведених транспортних одиниць у черзі, що проходить через стоп-лінію за 45 час Tj ; j - номер смуги руху (напряму руху). Для визначення часу T пропонується як початковий момент використовувати не момент 50 включення зеленого сигналу, а момент перетинання стоп-лінії переднім бампером першого в черзі ТЗ (але, якщо ТЗ вже перетнув або стоїть на стоп-лінії, то момент початку його руху). Як кінцевий момент при визначенні значення T пропонується брати момент проходження над стоп-лінією заднього бампера останнього в черзі ТЗ. Такий підхід дозволяє вилучити зі значення T величину додаткового часу, необхідного для реакції водія на зміну світлофорного сигналу, а також уникнути помилки, що може бути викликана неповним урахуванням довжини останнього в черзі ТЗ. 2 UA 112180 C2 Сканування виходу КЗ першим променем дає змогу одночасно визначити інтенсивність руху ТЗ у приведених одиницях (пр. од./год.) по кожній j-й смузі руху у продовж часу циклу Tц світлофорного регулювання Nj 5 3600 m j Tц . (4) Далі визначають ФК для кожної смуги руху у даній фазі світлофорного регулювання як відношення Yjk Njk MHjk Tj Tц , (5) де Yjk - фазовий коефіцієнт j-ї смуги руху у k-й фазі регулювання. 10 15 20 25 30 35 40 45 50 55 За розрахунковий (що визначає тривалість основного k-го такту) приймають найбільший по значенню ФК Yjk у даній k-й фазі регулювання. Менші значення Yjk можуть бути використані в подальшому для визначення мінімально необхідної тривалості основного такту. Визначення довжини черги, реального на даний момент часу складу ТЗ в ній та значення реального ПН та інтенсивності по кожній смузі руху впродовж часу дії світлофорного циклу дає можливість одержання найбільш повного комплексу інформації для контролю і подальшого оперативного (в реальному масштабі часу) керування рухом на перехресті при визначені оптимальних поточних значень елементів світлофорного циклу. Оперативне визначення часу проїзду через стоп-лінію черги ТЗ по кожній смузі дає можливість керувати тривалістю основного такту у випадку відсутності на підходах до перехрестя ТЗ при дії зеленого сигналу світлофора (дострокове призупинення дії такту). Це суттєво може підвищити ефективність світлофорного керування і розширює функціональні можливості існуючого способу. На Фіг. 2 представлена спрощена структурна схема пристрою, що розкриває основні відмінні риси запропонованого способу. Скануючий блок 1 має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують двопроменеве конусне покрокове сканування зони перехрестя за допомогою оптичних відхиляючих пристроїв 5 1 та 52 (дискретних сканісторів). Зміна положень кутів розгортки променів 8 1 та 82 здійснюється в реперній точці по черзі на кожному періоді сканування сигналом, що надходить з вузла розгортки 4 на входи дискретних сканісторів 51 та 52. Обидва оптичні промені 81 та 82 формуються вузлом розгортки у одній площині зі зміщенням на півперіоді(180°), що дає змогу фіксувати кожний з них у реперній точці і чітко розпізнавати відбиті від ТЗ сигнали на вході і виході з КЗ та перехрестя в цілому. Зміна і чергування кутів нахилу розгортки (з R1 на R2 та з R3 на R4 або навпаки) необхідна для однозначного визначення положення ТЗ щодо кіл сканування, типу і напрямку руху ТЗ в КЗ і зоні перехрестя по кожній смузі руху. Оптичні фотоприймачі 2 (ФПі) в процесі розгортки другого лазерного променя 8 2 по одному з кіл послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху на підходах до перехрестя. При цьому почергова з високою швидкістю зміни радіусів сканування (з R3 на R4 і назад) дозволяє точно визначити час переміщень ТЗ на дистанції (R3-R4), швидкість та тип ТЗ, що в'їжджають в КЗ по кожній смузі руху. В процесі розгортки першого 8 1 лазерного променя на дистанції (R1-R2) послідовно визначають швидкість, довжину і тип ТЗ, напрямки їх руху, коефіцієнти приведення ТЗ до легкового автомобіля, число m j приведених транспортних одиниць у кожній черзі, інтервали та інтенсивності по кожній смузі за будь-яке фіксоване значення часу. Фотоприймачі 2, направлені на вхідні смуги руху, сприймають послідовно відбиті сигнали як першого 81, так і другого 82 лазерних променів з часовою затримкою на півперіоді сканування, що дає можливість окремого розпізнавання сигналів різних променів. Перетворювач 6 сигналу кожного ФПі, відповідної смуги руху, перетворює сигнали в імпульсно-цифрові коди, які вводяться в обчислювальний пристрій 7, де далі визначаються всі необхідні параметри за будь-який час виміру (за час тривалості основного такту або циклу світлофорного регулювання). Для цього сигнали зміни елементів циклу світлофорного регулювання з виходу світлофорного об'єкта 9 подаються на відповідний вхід обчислювального пристрою 7. Якщо в обчислювальний пристрій 7 закладається алгоритм, правила і константи, відповідні діапазонам тимчасових інтервалів руху ТЗ у зоні перехрестя, при всіляких змінах напрямків їх руху по смугах, зберігається інформація про коефіцієнти приведення, склад ТЗ та поточні 3 UA 112180 C2 5 10 15 20 25 30 35 значення черг по смугах руху, тоді з'являється можливість визначення не тільки усіх перелічених вище параметрів, але і картограм інтенсивностей ТП у фізичних або приведених одиницях, потоків насичення та ФК по окремих смугах руху у реальному масштабі часу. Таким чином, запропонований спосіб дає можливість одержати найбільш повний комплекс інформації для контролю і подальшого оперативного (в реальному масштабі часу) управлінню рухом на перехресті. Перевагою запропонованого cпособу також є те, що його реалізацію можна здійснити одним пристроєм, розташованим в зоні перехрестя, що контролюється. ФОРМУЛА ВИНАХОДУ Спосіб визначення фазових коефіцієнтів регульованого перехрестя, оснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптичну вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню лазерного променя, при якому радіус другого концентричного кола на поверхні проїзної частини зменшують на певну задану величину, при цьому зміну положень розгортки здійснюють в реперній точці з високою швидкістю по черзі через кожен період сканування, а другий промінь розгортки формують у одній площині з першим, але зі зміщенням на півперіоді по колу розгортки, в подальшому приймають відображені оптичні сигнали фотоприймачами і надалі перетворюють ці сигнали в імпульсно-числовий код, за яким визначають швидкість, тип та час пересування транспортних засобів в зоні стоп-лінії, а далі послідовно реальні значення коефіцієнтів приведення до легкового автомобіля, кількість транспортних засобів у черзі у приведених одиницях, час пересування черги, починаючи з моменту перетинання стоп-лінії переднім бампером першого в черзі транспортного засобу і закінчуючи моментом проходження над стоп-лінією заднього бампера останнього в черзі автомобіля та значення потоків насичення по всіх смугах руху упродовж одного циклу регулювання, який відрізняється тим, що кути нахилу оптичних осей другого променя, як і першого, змінюють по черзі у реперній точці через кожен період сканування так, щоб радіус другого концентричного кола на вході контрольованої зони зменшувався на певну задану величину, визначають тип, склад та довжину черг транспортних засобів, які збираються в контрольованій зоні по кожній смузі на сигнали світлофора, що забороняють рух, а потім напрямки руху транспортних засобів по кожній смузі руху, їх інтенсивності, а також фазові коефіцієнти по кожній смузі руху, як відношення відповідних інтенсивностей до значень потоків насичення. 4 UA 112180 C2 5 UA 112180 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюDenysenko Oleh Ivanovych
Автори російськоюДенисенко Олег Васильевич
МПК / Мітки
МПК: G08G 1/056, G08G 1/095
Мітки: визначення, спосіб, регульованого, фазових, коефіцієнтів, перехрестя
Код посилання
<a href="https://ua.patents.su/8-112180-sposib-viznachennya-fazovikh-koeficiehntiv-regulovanogo-perekhrestya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення фазових коефіцієнтів регульованого перехрестя</a>
Спосіб визначення фазових коефіцієнтів регульованого перехрестя
Номер патенту: 88669
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: фазових, коефіцієнтів, перехрестя, спосіб, визначення, регульованого
Формула / Реферат:
Спосіб визначення фазових коефіцієнтів регульованого перехрестя, що включає сканування двома гостроспрямованими лазерними променями зони перехрестя в точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню...
Спосіб визначення потоків насичення регульованого перехрестя
Номер патенту: 84483
Опубліковано: 25.10.2013
Автори: Левтеров Андрій Іванович, Бубиніна Наталія Сергіївна, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: потоків, спосіб, регульованого, насичення, визначення, перехрестя
Формула / Реферат:
Спосіб визначення потоків насичення регульованого перехрестя, заснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідає відхиленню лазерного променя,...
Спосіб визначення потоків насичення регульованого перехрестя
Номер патенту: 105123
Опубліковано: 10.04.2014
Автори: Левтеров Андрій Іванович, Денисенко Олег Васильович
Мітки: спосіб, насичення, потоків, визначення, перехрестя, регульованого
Формула / Реферат:
Спосіб визначення потоків насичення регульованого перехрестя, що заснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптичну вісь одного з положень розгортки вибирають так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки вибирають таким, щоб воно відповідало...
Пристрій для визначення потоків насичення регульованого перехрестя
Номер патенту: 85342
Опубліковано: 11.11.2013
Автори: Левтеров Андрій Іванович, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: пристрій, потоків, перехрестя, насичення, визначення, регульованого
Формула / Реферат:
Пристрій для визначення потоків насичення регульованого перехрестя, що містить скануючий блок, який складається з лазерного випромінювача вузько спрямованого інфрачервоного променя, вузла розгортки, дискретного сканістора, та блок фотоприймачів, перетворювач сигналу фотоприймачів відповідної смуги, обчислювальний пристрій і світлофорний об'єкт, причому дискретний сканістор підключений до вузла розгортки, який, у свою чергу, підключений до...
Пристрій для визначення потоків насичення регульованого перехрестя
Номер патенту: 106321
Опубліковано: 11.08.2014
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович
МПК: G08G 1/09
Мітки: насичення, визначення, перехрестя, потоків, пристрій, регульованого
Формула / Реферат:
Пристрій для визначення потоків насичення регульованого перехрестя, що містить скануючий блок, який складається з лазерного випромінювача вузько спрямованого інфрачервоного променя, вузла розгортки, дискретного сканістора та блок фотоприймачів, перетворювач сигналу фотоприймачів відповідної смуги, обчислювальний пристрій і світлофорний об'єкт, причому дискретний сканістор підключений до вузла розгортки, який підключений до першого входу...
Попередній патент: Спосіб настройки компенсації ємнісного струму замикання на землю в електричних мережах
Наступний патент: Газонна решітка
Випадковий патент: Спосіб одержання бікарбонату натрію, мінеральних добрив та хлоридів карбонатних сполук