Пристрій для визначення потоків насичення регульованого перехрестя
Номер патенту: 106321
Опубліковано: 11.08.2014
Формула / Реферат
Пристрій для визначення потоків насичення регульованого перехрестя, що містить скануючий блок, який складається з лазерного випромінювача вузько спрямованого інфрачервоного променя, вузла розгортки, дискретного сканістора та блок фотоприймачів, перетворювач сигналу фотоприймачів відповідної смуги, обчислювальний пристрій і світлофорний об'єкт, причому дискретний сканістор підключений до вузла розгортки, який підключений до першого входу обчислювального пристрою, а вихід світлофорного об'єкту підключений до другого його входу, який відрізняється тим, що додатково введені другий дискретний сканістор, підключений до другого входу вузла розгортки, n-1 перетворювачі сигналів, елемент "АБО" та лічильник-дешифратор, причому перший вихід обчислювального пристрою підключений до входу лічильника-дешифратора, а вихід лічильника-дешифратора - до першого входу всіх n перетворювачів сигналів фотоприймачів, другі входи n-1 перетворювачів сигналів підключені до відповідних виходів n-1 фотоприймачів, а кожний вихід n перетворювачів сигналів через елемент "АБО" підключений до третього входу обчислювального пристрою, при цьому другий вихід обчислювального пристрою підключений до входу другого дискретного сканістора.
Текст
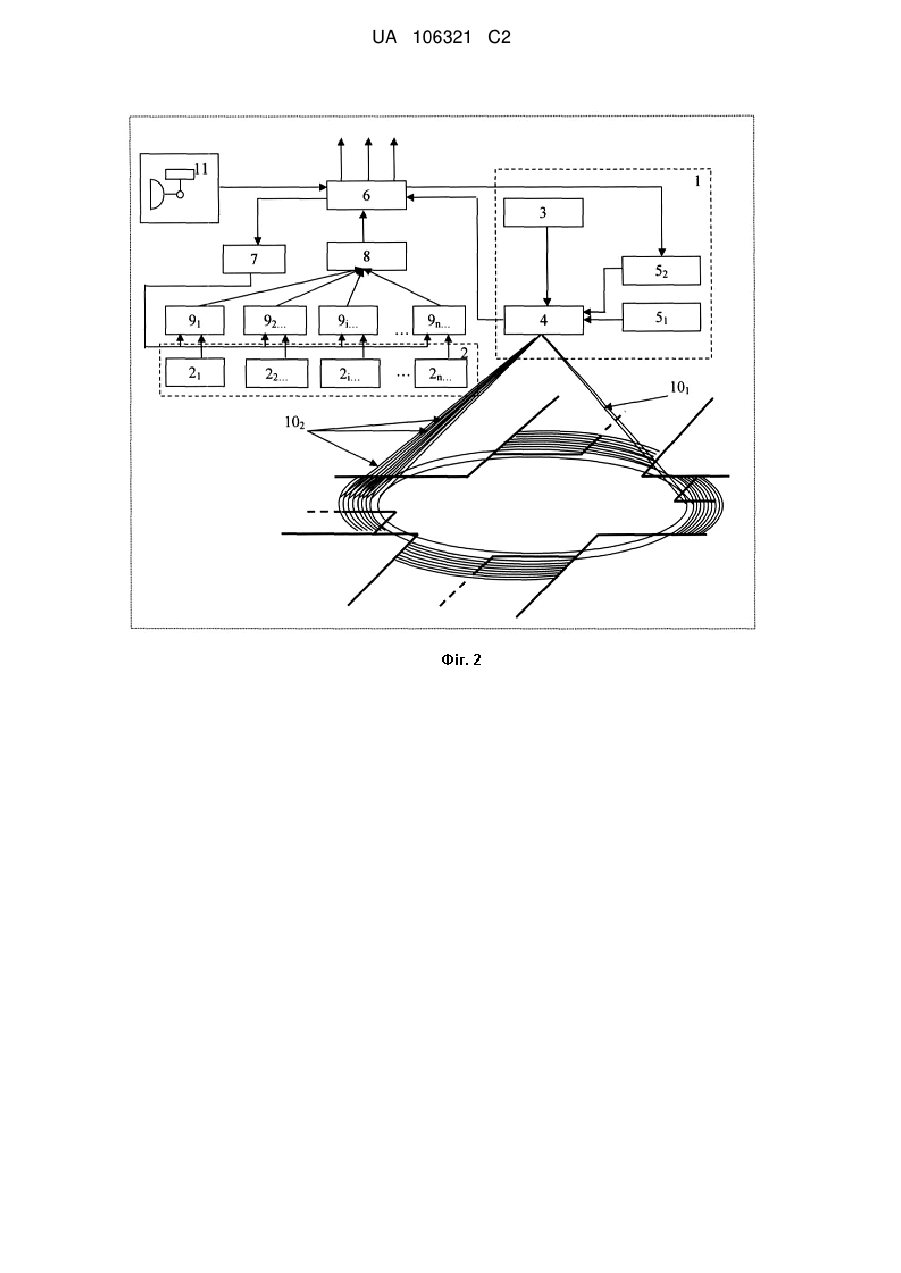
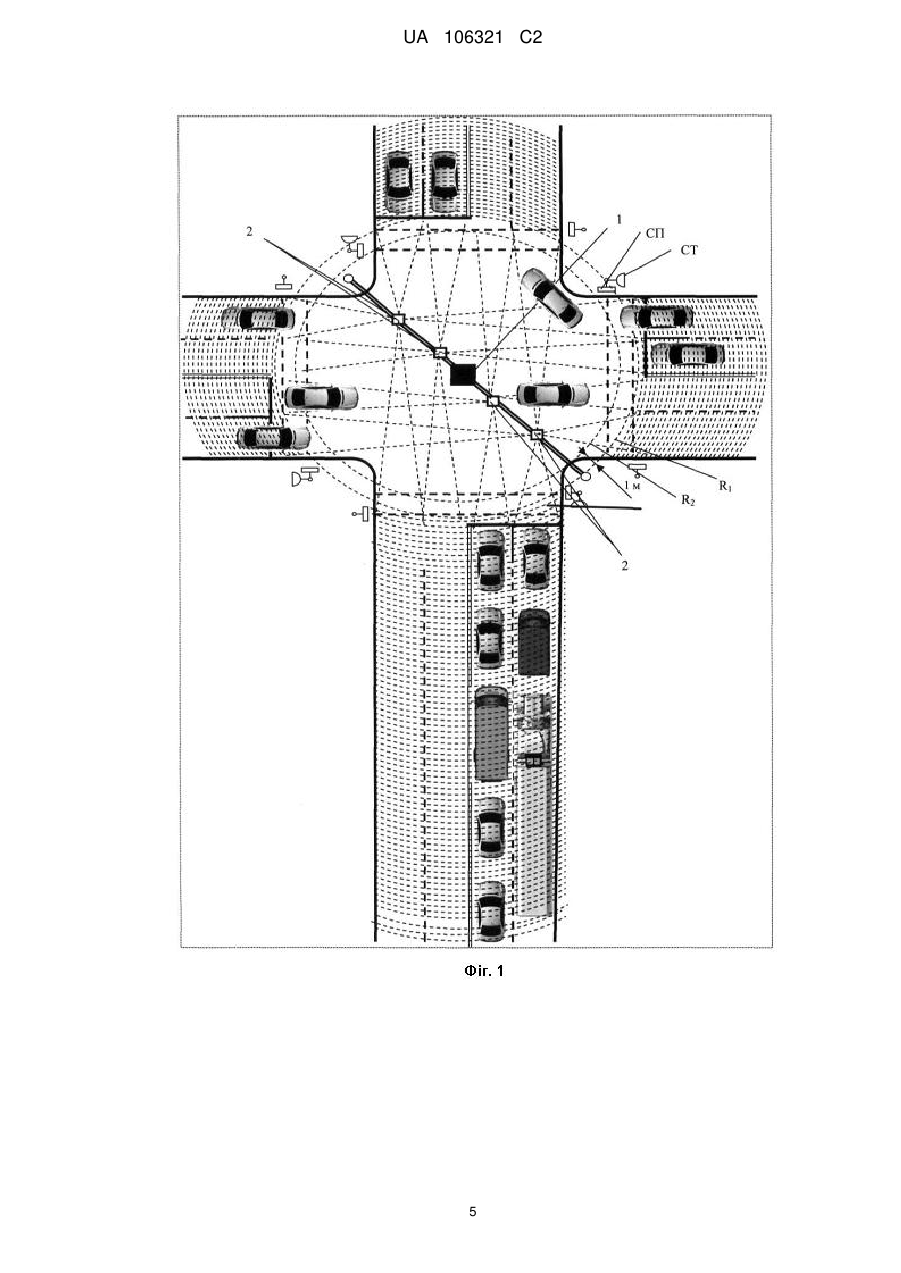
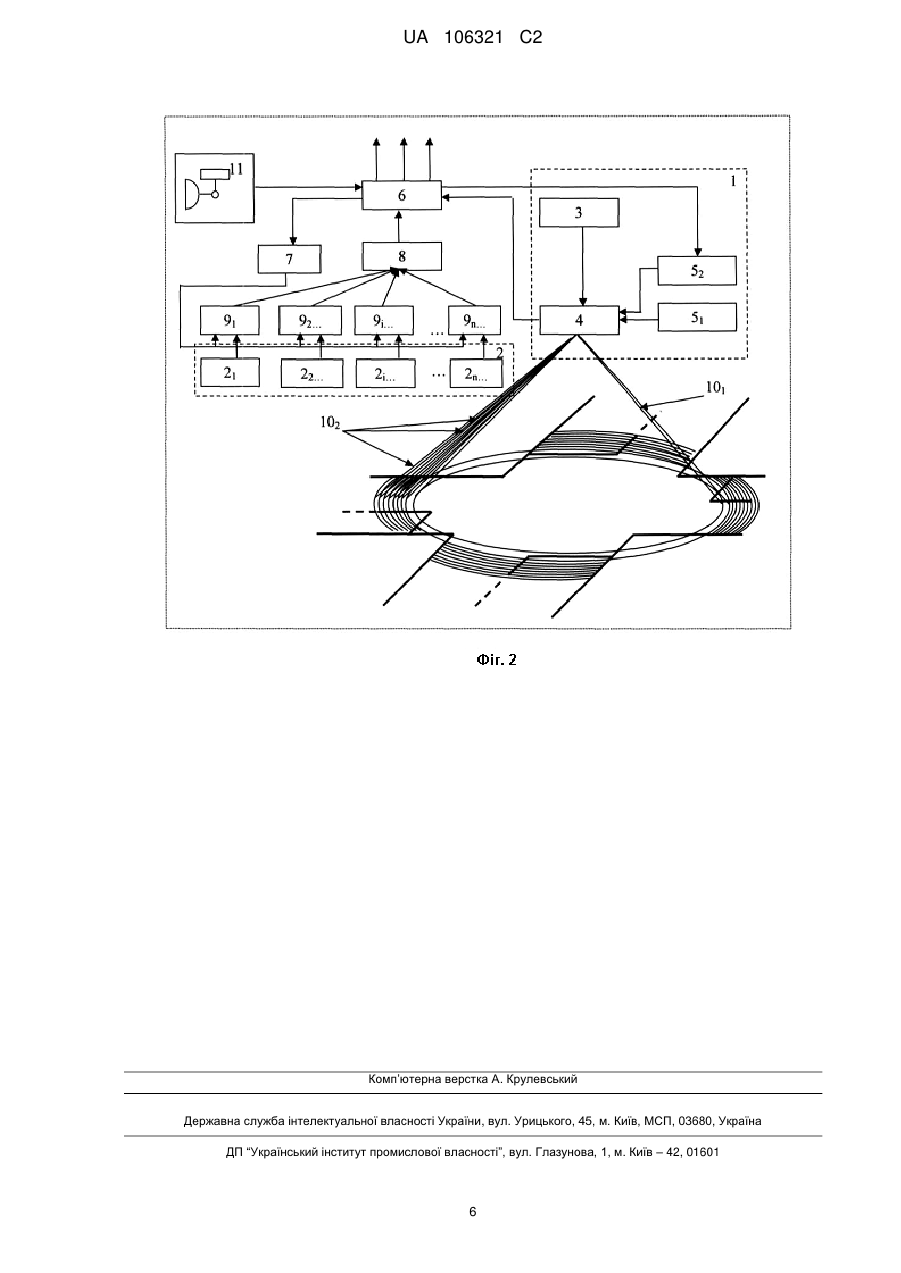
Реферат: Пристрій для визначення потоків насичення регульованого перехрестя належить до систем регулювання дорожнього руху (ДР) і може бути використано при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть вулично-дорожньої мережі, а також для підвищення ефективності керування рухом транспорту на регульованих перехрестях. Пристрій містить скануючий блок, який складається з лазерного випромінювача вузько спрямованого інфрачервоного променя, вузла розгортки, дискретного сканістора та блок фотоприймачів, перетворювач сигналу фотоприймачів відповідної смуги, обчислювальний пристрій і світлофорний об'єкт, додатково введені другий дискретний сканістор, n-1 перетворювачі сигналів, елемент "АБО" та лічильник-дешифратор. За допомогою пристрою досягається визначення значення реального потоку насичення по кожній смузі руху на протязі часу дії світлофорного циклу, дає можливість одночасно одержати найбільш повний комплекс інформації про параметри руху ТЗ в зоні перехрестя для контролю і подальшого оперативного керування світлофорною сигналізацією. UA 106321 C2 (12) UA 106321 C2 UA 106321 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до систем регулювання дорожнього руху (ДР) і може бути використано при розробці агрегатної системи засобів керування ДР, при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть вулично-дорожньої мережі (ВДМ), а також для підвищення ефективності керування рухом транспорту на регульованих перехрестях. Відомо пристрій, за допомогою якого реалізується спосіб визначення параметрів транспортних потоків (ТП) у зоні перехрестя, що складається зі скануючого блока, у склад якого входить лазерний випромінювач вузько спрямованого інфрачервоного променя, вузол розгортки та дискретний сканістор, блока фотоприймачів, перетворювача сигналу кожного фотоприймача відповідної смуги, обчислювального пристрою та світлофорного об'єкту, причому дискретний сканістор підключений до вузла розгортки, який, у свою чергу, підключений до першого входу обчислювального пристрою, фотоприймачі через перетворювач сигналу кожного фотоприймача підключені до другого входу обчислювального пристрою, а вихід світлофорного об'єкту підключений до третього входу обчислювального пристрою. (Патент на корисну модель UA 71913 U від 25.07.2012 р., бюл. №14/2012). Цей пристрій є найбільш близьким до пристрою, що заявляється, тому вибраний як найближчий аналог. Недоліком цього пристрою є вузькі функціональні можливості, оскільки він не дозволяє одночасно визначити такий важливий параметр ТП, як потік насичення (ПН) по смугах руху. Це, у свою чергу, обмежує можливість визначення у реальному масштабі часу оптимальних параметрів циклу світлофорного регулювання та знижує ефективність керування рухом транспорту на регульованих перехрестях. В основу запропонованого пристрою покладена мета розширення функціональних можливостей при одночасному визначенні комплексу параметрів за всіма підходами та виходами багатосмугових доріг на регульованому перехресті. Поставлена мета досягається тим, що в основу роботи запропонованого пристрою покладено конусне покрокове сканування одночасно двома вузько спрямованими лазерними променями інфрачервоного діапазону всіх підходів і виходів перехрестя, що дає можливість забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. На фіг. 1 представлена схема, яка розкриває основні відмінні особливості запропонованого пристрою. Поставлена задача вирішується тим, що у відомий пристрій, що вміщує скануючий блок, до якого входить лазерний випромінювач вузько спрямованого інфрачервоного променя, вузол розгортки та дискретний сканістор, а також блок фотоприймачів, перетворювач сигналу фотоприймача відповідної смуги, обчислювальний пристрій та світлофорний об'єкт, причому дискретний сканістор підключений до вузла розгортки, який у свою чергу підключений до першого входу обчислювального пристрою, а вихід світлофорного об'єкту підключений до другого входу обчислювального пристрою, додатково введені другий дискретний сканістор, підключений до другого входу скануючого пристрою, n-1 перетворювачів сигналів, елемент "АБО" та лічильник-дешифратор, причому перший вихід обчислювального пристрою підключений до входу лічильника-дешифратора, а його вихід до першого входу всіх n перетворювачів сигналів фотоприймачів, другі входи перетворювачів сигналів підключені до відповідних виходів фотоприймачів, кожний вихід n перетворювачів сигналів через елемент "АБО" підключено до третього входу обчислювального пристрою, а другий вихід обчислювального пристрою підключено до входу другого дискретного сканістора. Розгортка лазерного променя здійснюється скануючим блоком 1, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя (фіг. 1). У скануючому блоці, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя (R1) в області "стоп-ліній" всіх його підходів. До складу скануючого блока входять оптичні відхилюючі пристрої 51 та 52 (дискретні сканістори), один з яких 51 забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R2) на поверхні проїзної частини зменшується на задану величину (фіг. 2). Таким чином, блок сканування на кожному наступному періоді сканування змінює розгортку першого лазерного променя з одної оптичної осі на іншу та описує в зоні перехрестя на його поверхні два концентричні кола з різницею радіусів R1-R2 = 1 м (див. фіг. 1, 2). Оптичні фотоприймачі, об'єднані у блоці 2 (ФП і), в процесі розгортки лазерного променя по одному з кіл послідовно сприймають сигнали, відбиті від транспортних засобів (ТЗ), що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки (див. фіг. 2). 1 UA 106321 C2 5 10 15 20 Одночасно з першим другий лазерний промінь здійснює свою розгортку, починаючі з зовнішнього кола в зоні перехрестя з радіусом R1 і поступово покроково розширяє його зміною положень кутів розгортки в реперній точці на кожному періоді сканування, утворюючи на поверхні перехрестя та прилеглих дорогах концентричні кола з заданою величиною шагу (0,250,5 м). Це досягається програмною зміною кута оптичних осей розгортки для послідовного розширення радіусу кіл сканування з метою визначення черги ТЗ по кожній смузі на підходах до перехрестя, на які у даний час діє сигнал світлофору, що забороняє дорожній рух. Як тільки радіус кола другого променя розгортки досягає кінця найбільшої за протяжністю черги по смугах руху, здійснюється додаткове сканування з розширенням зони ще на 5-10 м, для надійного визначення останнього автомобіля у черзі. Після цього при відсутності відбитих від ТЗ сигналів по смугах руху на входах до перехрестя, на які діє сигнал світлофору, що забороняє рух, відбувається зміна кута осі сканування другого променя з метою її повернення у початкове положення, що відповідає радіусу R1. Далі цей процес багаторазово повторюється, що дозволяє при високій швидкості розгортки достатньо точно визначити довжину черги ТЗ, що накопичується на смугах руху на червоний сигнал світлофору у будь-яку мить часу. Це дає можливість достатньо точно визначити кількість ТЗ mj у черзі по кожній j-й смузі руху на підходах до перехрестя на момент зміни сигналу світлофору на зелений, або на момент початку руху перших у черзі ТЗ. Інформація про довжину, тип та час пересування ТЗ в зоні "стоп-ліній" дозволяє послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобілю КПРі як відношення величини середнього значення часового інтервалу t ві , проїзду КЗ конкретним типом ТЗ до величини середнього значення часового інтервалу t лі проїзду цієї зони легковим автомобілем: 25 30 35 40 45 50 55 КПРі = t ві / t лі (1) Вимірювання такого комплексу параметрів в зоні перехрестя дозволяє також визначити картограму інтенсивностей руху ТЗ за невеликі періоди часу (цикл світлофорного регулювання) як у фізичних так і у приведених одиницях: NПРj = КПР1N1 + КПР2N2 +…+ КПРiNi, (2) де ΝΠΡj - інтенсивності руху ТЗ у приведених до легкового автомобілю одиницях по j-й смузі руху; Ni - число транспортних засобів типу і у потоці; КПPi - коефіцієнт приведення ТЗ типу і до легкового автомобіля. Потім, за результатами сканування КЗ, першим променем визначають час проходження Tj цих черг, що здійснюють роз'їзд ТЗ на "зелений" сигнал світлофору, а значення потоку насичення MHj по кожній смузі розраховують за формулою: 3600 m j , (3) j j де mj - число приведених транспортних одиниць у черзі, що проходить через стоп-лінію за час Тj, j - номер смуги руху (напряму руху). Для визначення часу проходження черги ТЗ по кожній смузі (Tj) пропонується як початковий момент використовувати не момент включення зеленого сигналу, а момент перетинання стоплінії переднім бампером першого в черзі ТЗ. Як кінцевий момент при визначенні значення Тj пропонується брати момент проходження над стоп-лінією заднього бампера останнього в черзі ТЗ. Такий підхід дозволяє вилучити зі значення Тj величину додаткового часу, необхідного для реакції водія на зміну світлофорного сигналу, а також уникнути помилки, що може бути викликана у зв'язку з неповним врахуванням довжини останнього в черзі ТЗ. Визначення довжини черги, реального на даний момент часу складу ТЗ в ній та значення реального ПН по кожній смузі руху на протязі часу дії світлофорного циклу дає можливість одержання найбільш повного комплексу інформації для контролю і подальшого оперативного (в реальному масштабі часу) управління рухом на перехресті при визначені оптимальних поточних значень елементів світлофорного циклу. Оперативне визначення часу проїзду через стоп-лінію черги ТЗ по кожній смузі дає можливість керувати тривалістю основного такту у випадку відсутності на підходах до перехрестя ТЗ при дії зеленого сигналу світлофору (дострокове призупинення дії такту). Це може суттєво підвищити ефективність світлофорного керування і розширити функціональні можливості існуючого способу та пристроя, що його реалізує. 2 UA 106321 C2 5 10 15 20 25 30 35 40 45 50 55 На фіг. 2 приведена структурна схема пристрою для вимірювання параметрів транспортних потоків, де скануючий блок 1 має у своєму складі лазерний випромінювач 3 вузько спрямованого інфрачервоного променя, вузол розгортки 4, який формує двопроміневе конусне покрокове сканування зони перехрестя за допомогою двох дискретних сканісторів 5 1 і 52, що забезпечують відхилення осі обох лазерних променів в інші необхідні положення по заданим програмам з обчислювального пристрою 6, лічильник-дешифратор - 7, елемент "АБО" 8, блок фотоприймачів 2, перетворювачі сигналів 9i фотоприймачів 2i, які вибираються лічильникомдешифратором 7 згідно керуючій програмі, і перетворюють їх в імпульсно-цифрові коди, які через елемент "АБО" 8 вводяться в обчислювальний пристрій 6, куди одночасно також надходить інформація зі світлофорного об'єкта 11 про час дії елементів світлофорного циклу. Обчислювальний пристрій 6 в даному випадку виконує обчислювально-керуючі функції. Обидва оптичні промені 101 та 102 формуються вузлом розгортки у одній площині зі зміщенням на півперіоду (180°), що дає змогу розпізнавати у реперній точці кожний з них і чітко виконувати окрему програму їх відхилення у задані положення. Для першого лазерного променя 101 забезпечується конусне покрокове сканування з круговою траєкторією руху променя (з радіусом R1) в зоні "стоп-ліній" перехрестя та меншим на 1 м радіусом R2 зі зміною траєкторій руху променя у реперній точці дискретним сканістором 5 1 по черзі на кожному періоді сканування. Другий дискретний сканістор 52 забезпечує відхилення осі другого лазерного променя в інші необхідні положення, при яких радіус кола на поверхні проїзної частини змінюється від R1 з наростанням на кожному кроці на 0,25 або 0,5 м. Послідовно ці концентричні кола досягають кінця черги ТЗ тих смуг руху на вході до перехрестя, які знаходяться під дією червоного сигналу світлофору. Після досягнення кінця найбільшої за протяжністю черги по смугах руху, програмно забезпечується додаткове сканування з розширенням зони ще на 5-10 м, після чого при відсутності відбитих від ТЗ сигналів по смугах руху, де формуються черги, відбувається повернення другого променя 10 2 у найближчій реперній точці у початкове положення, що відповідає радіусу R1. Далі цей процес багаторазово повторюється, що дає змогу постійно отримувати інформацію про зміну довжини черги по кожній смузі, що контролюється. Фотоприймачі блока 2 (2i) в процесі розгортки першого лазерного променя 101 по одному з кіл послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. При цьому, почергова з високою швидкістю зміни радіусів сканування (з R1 на R2 і назад) дозволяє точно визначити час переміщень ТЗ на дистанції (R1R2) і швидкості руху ТЗ в контрольованій зоні. Швидкість переміщення ТЗ і час його фіксації в площині одного з конусів розгортки дозволяють послідовно визначити довжину і тип ТЗ, напрямки їх руху, коефіцієнти приведення ТЗ до легкового автомобіля, число mj приведених транспортних одиниць у кожній черзі, інтервали та інтенсивності по кожній смузі за будь-яке фіксоване значення часу. Фотоприймачі блока 2, направлені на вхідні смуги руху, сприймають послідовно відбиті сигнали як першого 101 так і другого 102 лазерних променів з часовою затримкою на півперіоду сканування, що дає можливість окремого розпізнавання сигналів різних променів, а лічильникдешифратор підключає тільки той перетворювач 9i сигналів, який, згідно керуючій програмі з обчислювального пристрою 6, на даний час відповідає тій смузі, яку сканує лазерний промінь. Перетворювачі 9i сигналів кожного фотоприймача 2i відповідної смуги руху, які обираються лічильником-дешифратором 7 згідно керуючій програмі з блока 6, перетворюють їх в імпульсноцифрові коди, які вводяться в обчислювальний пристрій 6, де далі визначаються всі вище перелічені параметри за будь-який проміжок часу або за час дії циклу світлофорного регулювання, інформація про який може надходити в обчислювальний пристрій 6 зі світлофорного об'єкта 11. Якщо в обчислювальний пристрій 6 закладається алгоритм, правила і константи, відповідні діапазонам тимчасових інтервалів руху ТЗ у зоні перехрестя, при всіляких змінах напрямків їх руху по смугах, зберігається інформація про коефіцієнти приведення, склад ТЗ та поточні значення черг по смугах руху, тоді з'являється можливість визначення не тільки усіх перелічених вище параметрів, але і картограм інтенсивностей ТП у фізичних або приведених одиницях. Для своєчасного повернення другого променя 102 в початкове положення обчислювальний пристрій 6 спочатку визначає кінець найбільшої черги, а потім по заданій програмі визначає додаткову зону і в разі відсутності відбитих від ТЗ сигналів по смугах, що контролюються, діє на дискретний сканістор 52. 3 UA 106321 C2 Таким чином, запропонований пристрій дає можливість одночасно одержати найбільш повний комплекс інформації про параметри руху ТЗ в зоні перехрестя, і в тому числі ПН, для контролю і подальшого оперативного (в реальному масштабі часу) управління світлофорною сигналізацією. 5 ФОРМУЛА ВИНАХОДУ 10 15 20 Пристрій для визначення потоків насичення регульованого перехрестя, що містить скануючий блок, який складається з лазерного випромінювача вузько спрямованого інфрачервоного променя, вузла розгортки, дискретного сканістора та блок фотоприймачів, перетворювач сигналу фотоприймачів відповідної смуги, обчислювальний пристрій і світлофорний об'єкт, причому дискретний сканістор підключений до вузла розгортки, який підключений до першого входу обчислювального пристрою, а вихід світлофорного об'єкта підключений до другого його входу, який відрізняється тим, що додатково введені другий дискретний сканістор, підключений до другого входу вузла розгортки, n-1 перетворювачі сигналів, елемент "АБО" та лічильник-дешифратор, причому перший вихід обчислювального пристрою підключений до входу лічильника-дешифратора, а вихід лічильника-дешифратора - до першого входу всіх n перетворювачів сигналів фотоприймачів, другі входи n-1 перетворювачів сигналів підключені до відповідних виходів n-1 фотоприймачів, а кожний вихід n перетворювачів сигналів через елемент "АБО" підключений до третього входу обчислювального пристрою, при цьому другий вихід обчислювального пристрою підключений до входу другого дискретного сканістора. 4 UA 106321 C2 5 UA 106321 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюDenysenko Oleh Ivanovych
Автори російськоюДенисенко Олег Васильевич
МПК / Мітки
МПК: G08G 1/09
Мітки: потоків, пристрій, регульованого, перехрестя, насичення, визначення
Код посилання
<a href="https://ua.patents.su/8-106321-pristrijj-dlya-viznachennya-potokiv-nasichennya-regulovanogo-perekhrestya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення потоків насичення регульованого перехрестя</a>
Пристрій для визначення потоків насичення регульованого перехрестя
Номер патенту: 85342
Опубліковано: 11.11.2013
Автори: Левтеров Андрій Іванович, Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: насичення, перехрестя, визначення, потоків, пристрій, регульованого
Формула / Реферат:
Пристрій для визначення потоків насичення регульованого перехрестя, що містить скануючий блок, який складається з лазерного випромінювача вузько спрямованого інфрачервоного променя, вузла розгортки, дискретного сканістора, та блок фотоприймачів, перетворювач сигналу фотоприймачів відповідної смуги, обчислювальний пристрій і світлофорний об'єкт, причому дискретний сканістор підключений до вузла розгортки, який, у свою чергу, підключений до...
Спосіб визначення потоків насичення регульованого перехрестя
Номер патенту: 84483
Опубліковано: 25.10.2013
Автори: Левтеров Андрій Іванович, Денисенко Олег Васильович, Бубиніна Наталія Сергіївна
МПК: G08G 1/09
Мітки: перехрестя, насичення, потоків, регульованого, визначення, спосіб
Формула / Реферат:
Спосіб визначення потоків насичення регульованого перехрестя, заснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки вибирається так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідає відхиленню лазерного променя,...
Спосіб визначення потоків насичення регульованого перехрестя
Номер патенту: 105123
Опубліковано: 10.04.2014
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович
Мітки: визначення, регульованого, спосіб, насичення, перехрестя, потоків
Формула / Реферат:
Спосіб визначення потоків насичення регульованого перехрестя, що заснований на скануванні гостроспрямованим лазерним променем зони перехрестя з точки над його геометричним центром конусним видом розгортки, причому оптичну вісь одного з положень розгортки вибирають так, щоб лазерний промінь описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки вибирають таким, щоб воно відповідало...
Спосіб визначення фазових коефіцієнтів регульованого перехрестя
Номер патенту: 88669
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: спосіб, перехрестя, регульованого, коефіцієнтів, фазових, визначення
Формула / Реферат:
Спосіб визначення фазових коефіцієнтів регульованого перехрестя, що включає сканування двома гостроспрямованими лазерними променями зони перехрестя в точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню...
Спосіб визначення параметрів транспортних потоків у зоні перехрестя
Номер патенту: 71913
Опубліковано: 25.07.2012
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович, Ярута Антон Миколайович
МПК: G08G 1/09
Мітки: спосіб, потоків, перехрестя, зони, визначення, транспортних, параметрів
Формула / Реферат:
Спосіб визначення параметрів транспортних потоків у зоні перехрестя, заснований на скануванні гостроспрямованого лазерного променя поперечного перерізу багатосмугової дороги спеціальним дискретним сканістором за програмою, що забезпечує відхилення лазерного випромінювання в необхідне число положень, що відповідає числу смуг дороги, прийомі відображених оптичних сигналів фотоприймачем і надалі перетворенні цих сигналів в імпульсно-числовий...
Попередній патент: Спосіб виготовлення декоративного покриття на поверхні панелі
Наступний патент: Пересувна пасічна установка
Випадковий патент: Пристрій для визначення рівнів і меж поділу радіоактивних текучих середовищ