Спосіб формування безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління
Номер патенту: 114107
Опубліковано: 27.02.2017
Автори: Роберт Хіромото, Кочан Володимир Володимирович, Яновський Максим Едуардович, Саченко Анатолій Олексійович, Харченко Вячеслав Сергійович, Фесенко Герман Вікторович, Яцків Василь Васильович

Формула / Реферат
1. Спосіб формування безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління при кризових ситуаціях, що включає системи пост-аварійного моніторингу обладнання та середовища атомних електростанцій, що використовують дрони-ретранслятори, які діляться на ведучий (Master) і ведені (Slave), причому кожен ведений може стати ведучим, який відрізняється тим, що безпровідна мережа розгортається безпосередньо після аварії шляхом підльоту дронів-ретрансляторів (ведучого і ведених) до місця аварії, після чого ведучий, згідно з локальною картою, побудованої відносно місцевих маяків, вказує кожному веденому межі зони його баражування і набір вимірювально-керуючих модулів, дані та команди яких цей ведений повинен ретранслювати.
2. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що ведучий дрон є максимально самостійним і займається лише автономним управлінням безпровідною мережею обміну даними між вимірювально-керуючими модулями та центром управління шляхом періодичного опитування ведених дронів про роботу їх підсистем захисту від помилок, аналізу отриманої інформації, підтвердження меж зон баражування ведених дронів або зміни цих зон відповідно до вимог підсистем захисту від помилок, причому, при необхідності (якщо рівень помилок не вдається привести до прийнятного), ведучий перерозподіляє вимірювально-керуючі модулі між веденими дронами або викликає додаткові ведені дрони для досягнення прийнятних умов для підсистем захисту від помилок ведених дронів.
3. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен дрон має можливість відновлення заряду акумуляторів шляхом виходу із складу безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління, причому ведучий дрон перерозподіляє ретрансльовані цим дроном вимірювально-керуючі модулі між іншими веденими дронами або, якщо їх пропускна здатність в актуальних умовах дії завад не дозволяє прийняти ретрансляцію додаткових вимірювально-керуючих модулів, викликає додаткові ведені дрони.
4. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що ведучий дрон постійно (із заданим інтервалом) опитує ведені дрони про їх актуальне місце знаходження, актуальні результати самодіагностики або самотестування та стан підсистем захисту від помилок, а також повідомляє центр управління при кризових ситуаціях за його запитом або при несправності ведених дронів.
5. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен дрон (як ведучий, так і ведені) містить три відносно незалежні підсистеми - зв'язку з вимірювально-керуючими модулями, зв'язку з центром управління при кризових ситуаціях та керування зонами баражування, причому, якщо дрон є ведучим, то третя підсистема збирає інформацію про актуальні зони баражування ведених, запам'ятовує її та приймає рішення про їх можливі зміни, а якщо веденим, то лише запам'ятовує інформацію про актуальні зони баражування ведених.
6. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен дрон (як ведучий, так і ведені) постійно слідкує за своїм положенням відносно місцевих маяків та повідомляє ці координати за запитами ведучого дрона або центру управління при кризових ситуаціях.
7. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен ведений дрон-ретранслятор має можливість стати ведучим дроном при пошкодженні ведучого дрона або його поверненні на базу для відновлення заряду акумуляторів, причому у стан ведучого переходить той ведений, який має мінімальний номер серед тих ведених, які в даний момент входять у формовану безпровідну мережу передачі даних, а сигналом для переходу є зникнення постійних запитів ведучого.
Текст
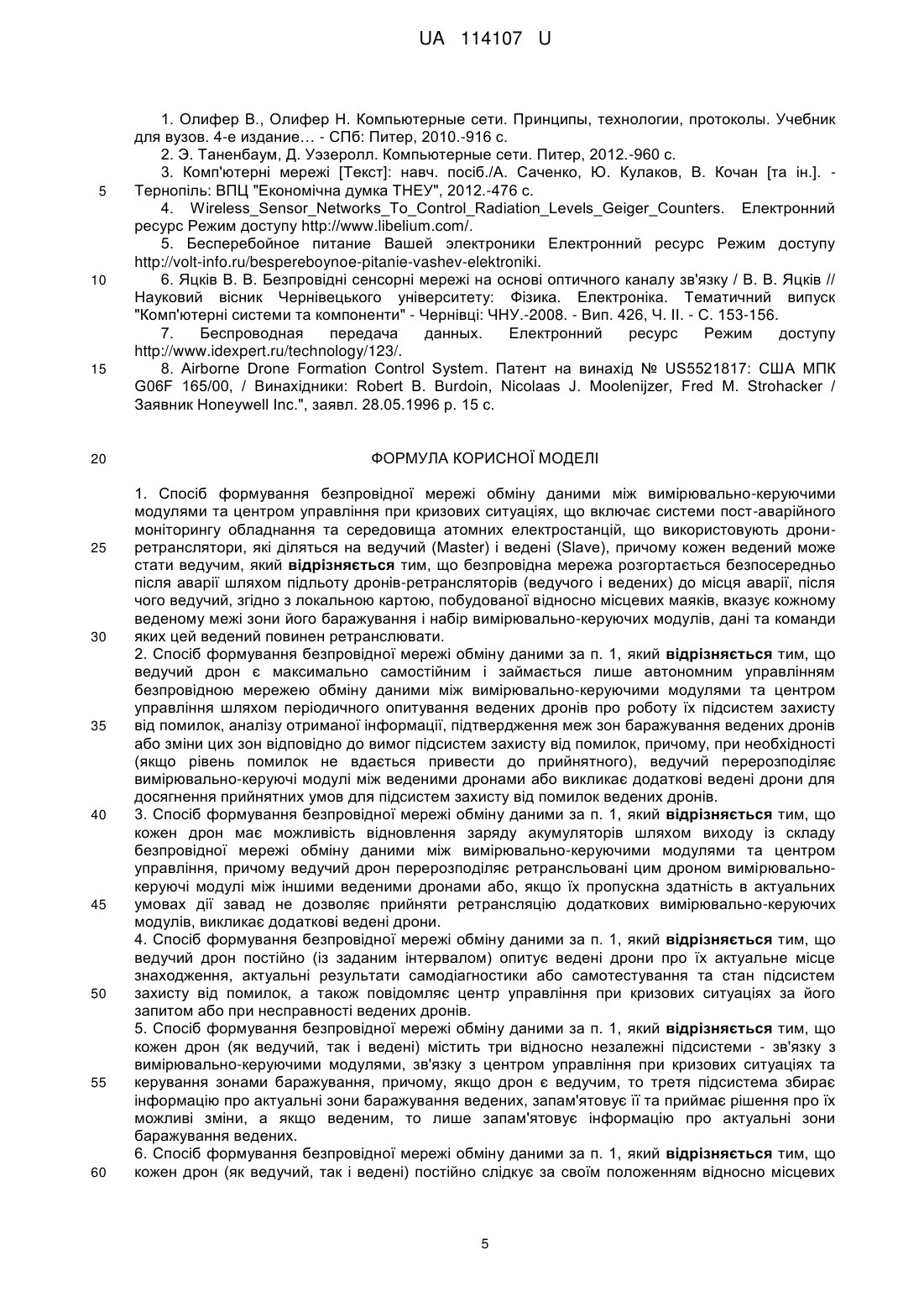
Реферат: Спосіб формування безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління при кризових ситуаціях включає системи пост-аварійного моніторингу обладнання та середовища атомних електростанцій, що використовують дрони ретранслятори, які діляться на ведучого (Master) і відомих (Slave), причому кожен відомий може стати ведучим. Безпровідна мережа розгортається безпосередньо після аварії шляхом підльоту дронів - ретрансляторів (ведучого і ведених) до місця аварії, після чого ведучий, згідно локальної карти, побудованої відносно місцевих маяків, вказує кожному веденому межі зони його баражування і набір вимірювально-керуючих модулів, дані та команди яких цей відомий повинен ретранслювати. UA 114107 U (12) UA 114107 U UA 114107 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до безпровідних комп'ютерних мереж, які забезпечують обмін даними та командами між вимірювально-керуючими модулями та центром управління, зокрема, при кризових (аварійних) ситуаціях, наприклад, під час аварій на промислових підприємств критичних галузей (хімічна, нафтогазова, атомні електростанції та ін.). Відомі [1, 2] способи формування мереж обміну даними між вимірювально-керуючими модулями та центром управління на основі провідних мереж (фіг. 1). При цьому, зазвичай, на апаратному рівні використовують інтерфейси RS-232 RS-485 та інші [3], на рівні програмної підтримки - інтерфейси fieldbas, profibas та інші [1-3]. Як середовище (лінії) зв'язку використовують двопровідні кабелі, кабелі "вита пара" та коаксіальні кабелі [1-3]. У нормальному режимі експлуатації обладнання, наприклад, атомної електростанції, такі мережі забезпечують високу надійність зв'язку, достатню пропускну здатність, захищеність від завад та захист обміну даними та командами від несанкціонованого доступу. Однак, в кризових (аварійних) ситуаціях, такі провідні мережі часто виявляються непрацездатними саме через пошкодження ліній зв'язку (як електричних, так і світловодних). Адже центр управління кризовими ситуаціями розміщують у спеціальному бункері та цілеспрямовано відносять від обладнання, на якому можуть виникнути кризові (аварійні) ситуації на відстань, при якому його пошкодження стають мало імовірними - для атомної електростанції мінімум на два км. Вимірювально-керуючі модулі мають відносно малі розміри (десятки см) і розміщуються у металевих шафах, тому їх тотальне пошкодження навіть при вибуху (не ядерному) також має невисоку імовірність. В той же час лінії зв'язку мають значну протяжність (наприклад, для атомної електростанції декілька км для кожного енергоблоку). Тому імовірність їх пошкодження при аварії висока. Аналогічно висока імовірність пошкодження при аварії ліній живлення вимірювально-керуючих модулів. Як показав досвід аварії на атомній електростанції Фукусіма, одними з перших операцій при ліквідації аварії було встановлення сенсорів, а також ліній їх зв'язку та живлення [4]. При цьому імовірно існуючі сенсори та вимірювально-керуючі модулі не всі були виведені з ладу, але вони втратили лінії зв'язку, тому навіть від справних не було ніякої користі. Відомим способом забезпечення живлення вимірювально-керуючих модулів в умовах пошкодження ліній живлення є резервне живлення за допомогою акумуляторів [5]. При цьому різко зростає вартість вимірювально-керуючих модулів та їх масо-габаритні параметри. Тому слід якомога економніше витрачати енергію акумуляторів, що дає змогу зменшити їх необхідну ємність. Тоді використання сучасних метало-гідридних та літій-іонних акумуляторів невеликої ємності дає змогу забезпечити резервне живлення вимірювально-керуючих модулів без значного зростання їх вартості та їх масо-габаритних параметрів. Аналогічно до резервування мережі живлення доцільно створити резервну мережу обміну даними між вимірювально-керуючими модулями та центром управління, яка була би стійкою до дії факторів, які виникають під час аварії. Відомі способи безпровідного зв'язку вимірювально-керуючих модулів, які використовують для зв'язку світлові промені (відкритий оптичний канал, [6]) або електромагнітні хвилі (радіозв'язок [7]). Використання відкритого оптичного каналу різко підвищує надійність зв'язку (прозорість повітря не втрачається при аварії). Але через можливі завали, полум'я, дим, пил та погодні фактори такий зв'язок також не завжди забезпечує необхідну надійність та охоплення зв'язком всіх вцілілих вимірювально-керуючих модулів. Найвищу надійність зв'язку можуть забезпечити електромагнітні хвилі (радіозв'язок [7]). Адже ніякі аварії не можуть знищити проникливість непровідного середовища до радіохвиль. При викидах радіоактивних речовин проникливість середовища до радіохвиль не зменшується, лише різко зростає рівень електромагнітного шуму. Для забезпечення безпосереднього обміну даними між вимірювально-керуючими модулями та віддаленим центром управління можливі наступні рішення: 1) значне збільшення потужності передавачів систем безпровідного радіозв'язку; 2) забезпечення ретрансляції сигналів вимірювально-керуючих модулів та центру управління при кризових ситуаціях. Перший варіант практично неприйнятний через значне зростання енергії, яку будуть споживати вимірювально-керуючі модулі, тобто значне зменшення ресурсу їх роботи при використанні аварійного живлення. В умовах аварії дуже імовірною є ситуація, коли відновлення заряду цих акумуляторів резервного живлення є неможливим. У такому випадку перший варіант означає значне (у декілька разів) зменшення строку роботи справних вимірювально-керуючих модулів. Другий варіант теж має суттєві недоліки - ретранслятори можуть бути пошкоджені під час аварії. Тому найкращим виходом було би розгортання резервної мережі обміну даними між 1 UA 114107 U 5 10 15 20 25 30 35 40 45 50 55 60 вимірювально-керуючими модулями та центром управління уже після аварії, коли ретранслятори не можуть бути пошкоджені. Для цього ретранслятори мають бути мобільними. Найбільш близьким за сутністю і технічними ознаками для пропонованого способу (прототипом) є система керування групою повітряних дронів [8], де для розміщення ретрансляторів використовують дрони (квадрокоптери, не пілотовані міні вертольоти). Така мережа ретрансляторів може суттєво (в сотні разів) зменшити енергію, споживану передавачем вимірювально-керуючих модулів. Однак запропонована у [8] мережа ретрансляторів не вирішує задач, які ставляться перед мережею обміну даними між вимірювально-керуючими модулями та центром управління при кризових ситуаціях під час аварій на атомних електростанціях або інших критичних об'єктах. Зокрема: 1. відсутні операції способу, які забезпечують розгортання мережі, що обмежує функціональні можливості способу та не створює можливості забезпечення високої живучості безпровідної мережі; 2. не реалізовано принцип і не надано операцій способу, які підтримують (забезпечують) розміщення дронів-ретрансляторів; це також обмежує функціональні можливості безпровідної мережі, оперативність її розгортання та не створює можливості забезпечення високої інформативності та живучості безпровідної мережі; 3. не вирішено питання відновлення заряду акумуляторів дронів-ретрансляторів, що зменшує живучість формованої безпровідної мережі. При цьому у [8] запропоновано виділення ведучого дрона, який керує рештою дронів, а також передбачена заміна ведучих дронів у процесі роботи мережі (наприклад, при пошкоджені). Однак: а) не вирішено питання функцій ведучого дрона; b) не вирішено питання розподілу завдань при заміні ведучого дрона; c) не запропоновано критерій вибору ведучого дрона при заміні. В основу корисної моделі поставлена задача створення такого способу формування безпровідної, базованої на дронах-ретрансляторах, мережі обміну даними між вимірювальнокеруючими модулями та центром управління при кризових (аварійних) ситуаціях, зокрема, під час аварій на промислових підприємствах критичних галузей (хімічна, нафто-газова, атомні електростанції та ін.), який повинен усунути всі вище перелічені недоліки прототипу і забезпечити високі показники інформативності мережі, її живучості та достовірності. Поставлена задача вирішується тим, що безпровідна мережа розгортається безпосередньо після аварії шляхом підльоту дронів-ретрансляторів (ведучого і ведених) до місця аварії, після чого ведучий, згідно локальної карти, побудованої відносно місцевих маяків, вказує кожному веденому дрону межі зони його баражування і набір вимірювально-керуючих модулів, дані та команди яких цей ведений дрон повинен ретранслювати. При цьому ведучий дрон є максимально самостійним і займається лише управлінням безпровідною мережею обміну даними між вимірювально-керуючими модулями та центром управління шляхом періодичного опитування ведених дронів про роботу їх підсистем захисту від помилок, аналізу отриманої інформації, підтвердження меж зон баражування відомих дронів або зміни цих зон відповідно до вимог підсистем захисту від помилок, причому, при необхідності (якщо рівень помилок не вдається привести до прийнятного), ведучий дрон перерозподіляє вимірювально-керуючі модулі між веденими дронами або викликає додаткові ведені дрони для досягнення прийнятних умов для підсистем захисту від помилок ведених дронів. Кожен дрон має можливість відновлення заряду акумуляторів шляхом виходу із складу безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління, причому ведучий дрон перерозподіляє ретрансльовані цим дроном вимірювально-керуючі модулі між іншими веденими дронами або, якщо їх пропускна здатність в акткальних умовах дії завад не дозволяє прийняти ретрансляцію додаткових вимірювально-керуючих модулів, викликає додаткові ведені дрони. Для створення можливості керування мережею ведучий дрон постійно (із заданим інтервалом) опитує ведені дрони про їх актуальне місце знаходження, актуальні результати самодіагностики або самотестування та стан підсистем захисту від помилок, а також повідомляє центр управління при кризових ситуаціях за його запитом або при несправності ведених дронів. Кожен дрон-ретранслятор (як ведучий, так і ведені) містить три відносно незалежні підсистеми зв'язку з вимірювально-керуючими модулями, зв'язку з центром управління та керування зонами баражування, причому, якщо дрон є ведучим, то третя підсистема збирає інформацію про актуальні зони баражування ведених, запам'ятовує її та приймає рішення про їх можливі зміни, а якщо веденим, то лише запам'ятовує інформацію про актуальні зони баражування ведених. Для цього кожен дрон (як ведучий, так і ведені) постійно слідкує за своїм положенням відносно місцевих маяків та повідомляє ці координати за запитами ведучого дрона або центру 2 UA 114107 U 5 10 15 20 25 30 35 40 45 50 55 60 управління при кризових ситуаціях. У випадку пошкодження ведучого дрона або при його відльоті для відновлення заряду акумуляторів кожен ведений дрон-ретранслятор має можливість стати ведучим дроном, причому у стан ведучого переходить той ведений дрон, який має мінімальний номер серед тих ведених дронів, які в даний момент входять у формовану безпровідну мережу передачі даних, а сигналом для переходу є зникнення постійних запитів ведучого. Таким чином, у пропонованому технічному рішенні вирішено питання розгортання мережі вона розгортається уже після аварії. її елементи (дрони з ретрансляторами) не можуть бути пошкоджені під час аварії - вони базуються (зберігаються) у сховищі, яке знаходиться на безпечній віддалі від енергоблоків та захищене від дії факторів аварії на дрони. Крім того, при пошкодженні дронів, вони можуть бути замінені резервними. Таким чином пропонована безпровідна мережа обміну даними між вимірювально-керуючими модулями та центром управління забезпечує високу живучість при цьому час розгортання такої мережі практично рівний тривалості польоту дронів від місця їх базування до енергоблока, на якому виникла аварія. Розміщення дронів-ретрансляторів базується на локальних маяках та командах ведучого дрона. Таким чином досягається можливість досягнення достатньої точності розміщення дронівретрансляторів в умовах інтенсивних електромагнітних завад - сигнали системи глобального позиціонування, наприклад, GPS, мають надто малу потужність для позиціонування дронів під час аварії на атомній електростанції. Локальні маяки розміщені на відстані достатній для їх безпеки при аварії, але ця відстань на приблизно 4 порядки менша за відстань до супутників GPS. Крім того, потужність локальних маяків, які живляться від стаціонарної електромережі може бути високою. Як основний принцип розміщення дронів-ретрансляторів пропонується можливість забезпечення достатньої завадостійкості протоколів обміну даними та командами в умовах інтенсивних електромагнітних завад. При цьому, крім застосування завадостійких кодів з виявленням помилок, необхідно використати інформацію про інтенсивність поточних помилок і кількість нерозшифрованих правильно пакетів (повідомлень) для визначення необхідної відстані від вимірювально-керуючих модулів до дронів-ретрансляторів. Ведучий дрон повинен враховувати згадану інформацію для відповідного позиціонування дронів-ретрансляторів і, при необхідності, змінювати зони їх баражування, перерозподіляти між дронами-ретрансляторами обслуговувані ними вимірювально-керуючі модулі та викликати додаткові дрони-ретранслятори для забезпечення достатньої для надійної роботи їх систем корекції помилок відстані до вимірювально-керуючих модулів. Таким чином досягається висока достовірність повідомлень, що передаються за допомогою пропонованої мережі. Час знаходження дронів поблизу енергоблока обмежений, зокрема, зарядом акумуляторів дронів. Можливість виклику додаткових дронів-ретрансляторів і перерозподілу між ними обслуговуваних вимірювально-керуючих модулів дає змогу вирішити питання відновлення заряду акумуляторів дронів-ретрансляторів (а також ведучого дрона). Дрони можуть відновлювати свій заряд шляхом: 1) повернення на місце базування, де мусить бути можливість заряду акумуляторів (акумулятори дронів необхідно підзаряджати під час очікування аварії через їх постійний саморозряд); 2) повернення на спеціально виведене поблизу аварійного енергоблока місце відновлення заряду акумуляторів дронів (для зменшення часу відсутності дронів на робочому місці). При цьому місце відновлення заряду акумуляторів дронів повинно забезпечувати або одночасний заряд акумуляторів декількох дронів або заміну розряджених акумуляторів на заряджені (у цьому випадку час заміни малий, достатньо одного робочого місця). Таким чином, дрон-ретранслятор, заряд акумуляторів якого закінчується, виходить із складу безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління. При цьому про свій вихід він може повідомляти ведучий дрон або ведучий дрон може визначити відсутність веденого дрона-ретранслятора через відсутність відповідей на запити. Ведучий дрон перерозподіляє обслуговувані цим дроном-ретранслятором вимірювально-керуючі модулі між іншими веденими дронами або, якщо їх пропускна здатність в актуальних умовах дії завад не дозволяє прийняти ретрансляцію додаткових вимірювальнокеруючих модулів, викликає додаткові ведені дрони. Таким чином пропонована безпровідна мережа обміну даними між вимірювально-керуючими модулями та центром управління може забезпечити високу живучість тривалий час. У пропонованій безпровідній мережі обміну даними між вимірювально-керуючими модулями та центром управління ведучий дрон є максимально самостійним і займається лише 3 UA 114107 U 5 10 15 20 25 30 35 40 45 50 55 60 управлінням безпровідною мережею обміну даними між вимірювально-керуючими модулями та центром управління. Основними його функціями є: 1) первинний розподіл (при розгортанні мережі) вимірювально-керуючих модулів між веденими дронами-ретрансляторами; 2) періодичне (із заданим фіксованим періодом) опитування ведених дронів-ретрансляторів; 3) аналіз отриманої інформації; 4) підтвердження меж зон баражування ведених дронів-ретрансляторів або зміна цих зон; 5) перерозподіл вимірювально-керуючих модулів між веденими дронами-ретрансляторами; 6) виклик додаткових ведених дронів-ретрансляторів. Такий мінімальний набір функцій ведучого дрона забезпечує гнучке функціонування пропонованої безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління. Живучість пропонованої безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління забезпечується також тим, що кожен ведений дронретранслятор може стати ведучим. Для підготовки до цього кожен дрон (як ведучий, так і ведені) містить підсистему збору інформації про актуальні зони баражування ведених дронівретрансляторів. Ця підсистема для ведучого дрона є основою прийняття рішень про розподіл зон баражування дронів-ретрансляторів і розподіл вимірювально-керуючих модулів між веденими дронами-ретрансляторами. Для ведених дронів-ретрансляторів ця підсистема лише запам'ятовує дані про актуальний стан (зони баражування) всіх дронів-ретрансляторів (підсистема прийняття рішень не активна). Таким чином кожен дрон-ретранслятор має повну поточну інформацію про стан мережі. Для усунення колізій при заміні ведучого дрона критерієм вибору нового ведучого є його індивідуальний номер у списку всіх дронів, що можуть входити у безпровідну мережу обміну даними між вимірювально-керуючими модулями та центром управління. Кожен ведений дронретранслятор, як уже вказувалося у попередньому абзаці, має у своїй пам'яті список всіх ведених дронів-ретрансляторів, які баражують у своїх зонах біля об'єкту аварії. Крім того, вини постійно оновлюють цей список прослуховуючи відповіді на запити ведучого дрона. Тому кожен ведений дрон-ретранслятор повністю готовий до того, щоби оперативно взяти на себе роль ведучого - йому треба лише активізувати підсистему прийняття рішень. Момент зміни ведучого дрона може бути визначений або за відповідною командою ведучого дрона (якщо він, наприклад, відлучається для заряду акумуляторів), або при відсутності запитів ведучого дрона на протязі заданого числа фіксованих періодів (якщо ведучий дрон, наприклад, пошкоджено). Кожен ведений дрон-ретранслятор, через те, що він має у своїй пам'яті список номерів всіх ведених дронів-ретрансляторів, які баражують у своїх зонах біля об'єкту аварії, по суті наперед знає, який дрон стане ведучим, що виключає можливість колізій. На фіг. 1 подано структурну схему провідної мережі, що веде (згідно існуючих правил) обмін даними та командами між вимірювально-керуючими модулями та центром управління. Така мережа функціонує при нормальній роботі (відсутності аварій), наприклад, атомної електростанції. Навіть на фіг. 1 видно, що провідна мережа (а також умовно не показана на фіг. 1 мережа живлення), через велику протяжність, наражається на можливість пошкодження під час аварії. На фіг. 2 подано структурну схему розгорнутої після аварії безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління, сформовану відповідно до пропонованого способу. У цю структурну схему входять, крім вимірювально-керуючих модулів та центра управління, також ведучий дрон та ведені дрони-ретранслятори. Кожен вимірювально-керуючий модуль оснащений блоками, що забезпечують безпровідний зв'язок із веденими дронами-ретрансляторами, а також блоком резервного живлення. Кожен дрон має три підсистеми - зв'язку з вимірювально-керуючими модулями, зв'язку з центром управління та керування. У ведучому дроні підсистема керування активна (опитує ведені дрониретранслятори, приймає їх відповіді, приймає відповідні рішення та розсилає їх). У ведених дронах-ретрансляторах підсистема керування пасивна (лише запам'ятовує відповіді ведених дронів-ретрансляторів). Таким чином, пропонований спосіб формування безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління дає змогу оперативного розгортання цієї мережі та забезпечення її високої інформативності, живучості та достовірності, що є основними критеріями придатності та якості обладнання для управління при виникненні кризових (аварійних) ситуацій на складних технічних об'єктах, що характеризуються обмеженням доступу аварійних і ремонтних бригад. Джерела інформації: 4 UA 114107 U 5 10 15 20 25 30 35 40 45 50 55 60 1. Олифер В., Олифер Н. Компьютерные сети. Принципы, технологии, протоколы. Учебник для вузов. 4-е издание… - СПб: Питер, 2010.-916 с. 2. Э. Таненбаум, Д. Уэзеролл. Компьютерные сети. Питер, 2012.-960 с. 3. Комп'ютерні мережі [Текст]: навч. посіб./А. Саченко, Ю. Кулаков, В. Кочан [та ін.]. Тернопіль: ВПЦ "Економічна думка ТНЕУ", 2012.-476 с. 4. Wireless_Sensor_Networks_To_Control_Radiation_Levels_Geiger_Counters. Електронний ресурс Режим доступу http://www.libelium.com/. 5. Бесперебойное питание Вашей электроники Електронний ресурс Режим доступу http://volt-info.ru/bespereboynoe-pitanie-vashev-elektroniki. 6. Яцків В. В. Безпровідні сенсорні мережі на основі оптичного каналу зв'язку / В. В. Яцків // Науковий вісник Чернівецького університету: Фізика. Електроніка. Тематичний випуск "Комп'ютерні системи та компоненти" - Чернівці: ЧНУ.-2008. - Вип. 426, Ч. II. - С. 153-156. 7. Беспроводная передача данных. Електронний ресурс Режим доступу http://www.idexpert.ru/technology/123/. 8. Airborne Drone Formation Control System. Патент на винахід № US5521817: США МПК G06F 165/00, / Винахідники: Robert В. Burdoin, Nicolaas J. Moolenijzer, Fred M. Strohacker / Заявник Honeywell Inc.", заявл. 28.05.1996 р. 15 c. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Спосіб формування безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління при кризових ситуаціях, що включає системи пост-аварійного моніторингу обладнання та середовища атомних електростанцій, що використовують дрониретранслятори, які діляться на ведучий (Master) і ведені (Slave), причому кожен ведений може стати ведучим, який відрізняється тим, що безпровідна мережа розгортається безпосередньо після аварії шляхом підльоту дронів-ретрансляторів (ведучого і ведених) до місця аварії, після чого ведучий, згідно з локальною картою, побудованої відносно місцевих маяків, вказує кожному веденому межі зони його баражування і набір вимірювально-керуючих модулів, дані та команди яких цей ведений повинен ретранслювати. 2. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що ведучий дрон є максимально самостійним і займається лише автономним управлінням безпровідною мережею обміну даними між вимірювально-керуючими модулями та центром управління шляхом періодичного опитування ведених дронів про роботу їх підсистем захисту від помилок,аналізу отриманої інформації, підтвердження меж зон баражування ведених дронів або зміни цих зон відповідно до вимог підсистем захисту від помилок, причому, при необхідності (якщо рівень помилок не вдається привести до прийнятного), ведучий перерозподіляє вимірювально-керуючі модулі між веденими дронами або викликає додаткові ведені дрони для досягнення прийнятних умов для підсистем захисту від помилок ведених дронів. 3. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен дрон має можливість відновлення заряду акумуляторів шляхом виходу із складу безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління, причому ведучий дрон перерозподіляє ретрансльовані цим дроном вимірювальнокеруючі модулі між іншими веденими дронами або, якщо їх пропускна здатність в актуальних умовах дії завад не дозволяє прийняти ретрансляцію додаткових вимірювально-керуючих модулів, викликає додаткові ведені дрони. 4. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що ведучий дрон постійно (із заданим інтервалом) опитує ведені дрони про їх актуальне місце знаходження, актуальні результати самодіагностики або самотестування та стан підсистем захисту від помилок, а також повідомляє центр управління при кризових ситуаціях за його запитом або при несправності ведених дронів. 5. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен дрон (як ведучий, так і ведені) містить три відносно незалежні підсистеми - зв'язку з вимірювально-керуючими модулями, зв'язку з центром управління при кризових ситуаціях та керування зонами баражування, причому, якщо дрон є ведучим, то третя підсистема збирає інформацію про актуальні зони баражування ведених, запам'ятовує її та приймає рішення про їх можливі зміни, а якщо веденим, то лише запам'ятовує інформацію про актуальні зони баражування ведених. 6. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен дрон (як ведучий, так і ведені) постійно слідкує за своїм положенням відносно місцевих 5 UA 114107 U 5 маяків та повідомляє ці координати за запитами ведучого дрона або центру управління при кризових ситуаціях. 7. Спосіб формування безпровідної мережі обміну даними за п. 1, який відрізняється тим, що кожен ведений дрон-ретранслятор має можливість стати ведучим дроном при пошкодженні ведучого дрона або його поверненні на базу для відновлення заряду акумуляторів, причому у стан ведучого переходить той ведений, який має мінімальний номер серед тих ведених, які в даний момент входять у формовану безпровідну мережу передачі даних, а сигналом для переходу є зникнення постійних запитів ведучого. 10 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюKochan Volodymyrovych, Robert Hiromoto
Автори російськоюКочан Владимир Владимирович
МПК / Мітки
МПК: G06F 7/00
Мітки: формування, обміну, безпровідної, модулями, центром, вимірювально-керуючими, управління, даними, мережі, спосіб
Код посилання
<a href="https://ua.patents.su/8-114107-sposib-formuvannya-bezprovidno-merezhi-obminu-danimi-mizh-vimiryuvalno-keruyuchimi-modulyami-ta-centrom-upravlinnya.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування безпровідної мережі обміну даними між вимірювально-керуючими модулями та центром управління</a>
Спосіб та пристрій для використання каналу трафіку для обміну керуючими даними у системі безпровідного зв’язку (варіанти)
Номер патенту: 84864
Опубліковано: 10.12.2008
Автор: Аталі Санджив Арвінд
МПК: H04L 12/00
Мітки: даними, безпровідного, використання, варіанти, обміну, системі, трафіку, пристрій, зв'язку, спосіб, каналу, керуючими
Формула / Реферат:
1. Спосіб використання каналу трафіку для обміну керуючими даними у системі безпровідного зв'язку, який включає:прийом індикатора передачі керуючого повідомлення для передачі від базової станції на мобільну станцію по каналу трафіку;вибір таймера паузи каналу трафіку, пов'язаного з вказаною передачею вказаного керуючого повідомлення від вказаної базової станції на вказану мобільну станцію, базуючись на вказаному індикаторі...
Система обміну даними між мобільними пристроями зв’язку абонентів стільникової мережі
Номер патенту: 106350
Опубліковано: 25.04.2016
Автор: Ішкабулов Курбан
МПК: H04W 28/02, H04W 4/00, H04W 8/26, H04L 29/06, H04L 12/58
Мітки: стільникової, абонентів, обміну, даними, мобільними, мережі, система, пристроями, зв'язку
Формула / Реферат:
1. Система обміну даними між мобільними пристроями зв'язку абонентів стільникової мережі, яка містить мінімально один локалізований сервер обміну даними, з'єднаний через підключення до мережі Інтернет з мінімально одним локалізованим програмним модулем, записаним у запам'ятовуючому пристрої мобільного пристрою зв'язку, одночасно пов'язаним через встановлений в ньому ідентифікатор мережі стільникового зв'язку з сервером послуг мережі...
Автоматизована система управління пристроями пасажирської автоматики та спосіб обміну даними в цій системі
Номер патенту: 73855
Опубліковано: 15.09.2005
Автори: Лещенко Володимир Георгійович, Тимченко Віталій Володимирович
МПК: G07B 15/00, G07B 15/02
Мітки: автоматики, система, цій, обміну, автоматизована, управління, даними, спосіб, пасажирської, системі, пристроями
Формула / Реферат:
1. Автоматизована система управління пристроями пасажирської автоматики (АСУППА), яка містить апаратуру зв'язку з телекомунікаційною мережею автоматизованої системи проходу пасажирів (АСПП), щонайменше один автоматичний контрольний пункт на вхід (АКП), щонайменше один пункт контрольний автоматичний на вихід (ПКА), щонайменше один пульт контролера вестибюля (ПКВ), щонайменше одне автоматизоване робоче місце (АРМ) касира вестибюля, сервер...
Спосіб обміну даними
Номер патенту: 31149
Опубліковано: 25.03.2008
Автор: Омельяненко Ярослав Вікторович
МПК: G06F 17/00, G06F 19/00, G06Q 90/00, G06F 12/00
Формула / Реферат:
1. Спосіб обміну даними, який характеризується підготовленням файлів інформаційного, рекламного або розважального змісту, придатних для завантаження на мобільний пристрій, підготовленням на сервері порядку розсилання файлів, завантаженням файлів з сервера на комп'ютер, з'єднаний з модулем бездротового обміну даними, розміщенням комп'ютера з модулем бездротового обміну даними в місці періодичного відвідування користувачами мобільних пристроїв,...
Спосіб та пристрій, призначені для визначення місцеположення безпровідної локальної мережі в глобальній мережі
Номер патенту: 101416
Опубліковано: 25.03.2013
Автори: Джаін Нікхіл, Годжик Алєксандар, Нанда Санджив, Дешпанде Манодж М.
МПК: H04W 48/00
Мітки: локальної, безпровідної, мережі, пристрій, спосіб, призначені, глобальній, визначення, місцеположення
Формула / Реферат:
1. Спосіб, що сприяє пошуку безпровідної локальної мережі за допомогою безпровідного пристрою зв'язку, який знаходиться на зв'язку з глобальною мережею, причому спосіб включає етапи, на яких:встановлюють з'єднання з першою безпровідною локальною мережею;ініціюють захоплення ідентифікаційної мітки, щоб запам'ятати інформацію, яка ідентифікує місцеположення для першої безпровідної локальної мережі;вимірюють атрибути...
Попередній патент: Імпульсний редуктор
Наступний патент: Спосіб прогнозування розвитку післяопераційного панкреатиту
Випадковий патент: Спосіб формування холедохоєюноанастомозу