Оптичний сенсор хвилювання в рідині
Формула / Реферат
1. Оптичний сенсор хвилювання в рідині, що включає співвісні, зустрічно спрямовані джерело світла й оптичний детектор, які з'єднані механічною перемичкою, поплавкову систему та блок обробки сигналів, які розташовані на механічній перемичці, і блок живлення, який відрізняється тим, що в нього додатково введені чотири оптичних детектори, які в сукупності з першим оптичним детектором являють собою хрестоподібну приймальну решітку з першим детектором у її центрі, і датчик вектора магнітного поля Землі, який розташований на верхній частині механічної перемички, при цьому блок живлення розташовано на нижній частині механічної перемички.
2. Оптичний сенсор за п. 1, який відрізняється тим, що джерело світла розташовано на верхньому, а хрестоподібна приймальна решітка на нижньому кінці механічної перемички.
3. Оптичний сенсор за п. 1, який відрізняється тим, що джерело світла розташовано на нижньому, а хрестоподібна приймальна решітка на верхньому кінці механічної перемички.
4. Оптичний сенсор за будь-яким з пп. 1-3, який відрізняється тим, що джерело світла являє собою напівпровідниковий інфрачервоний випромінювач.
Текст
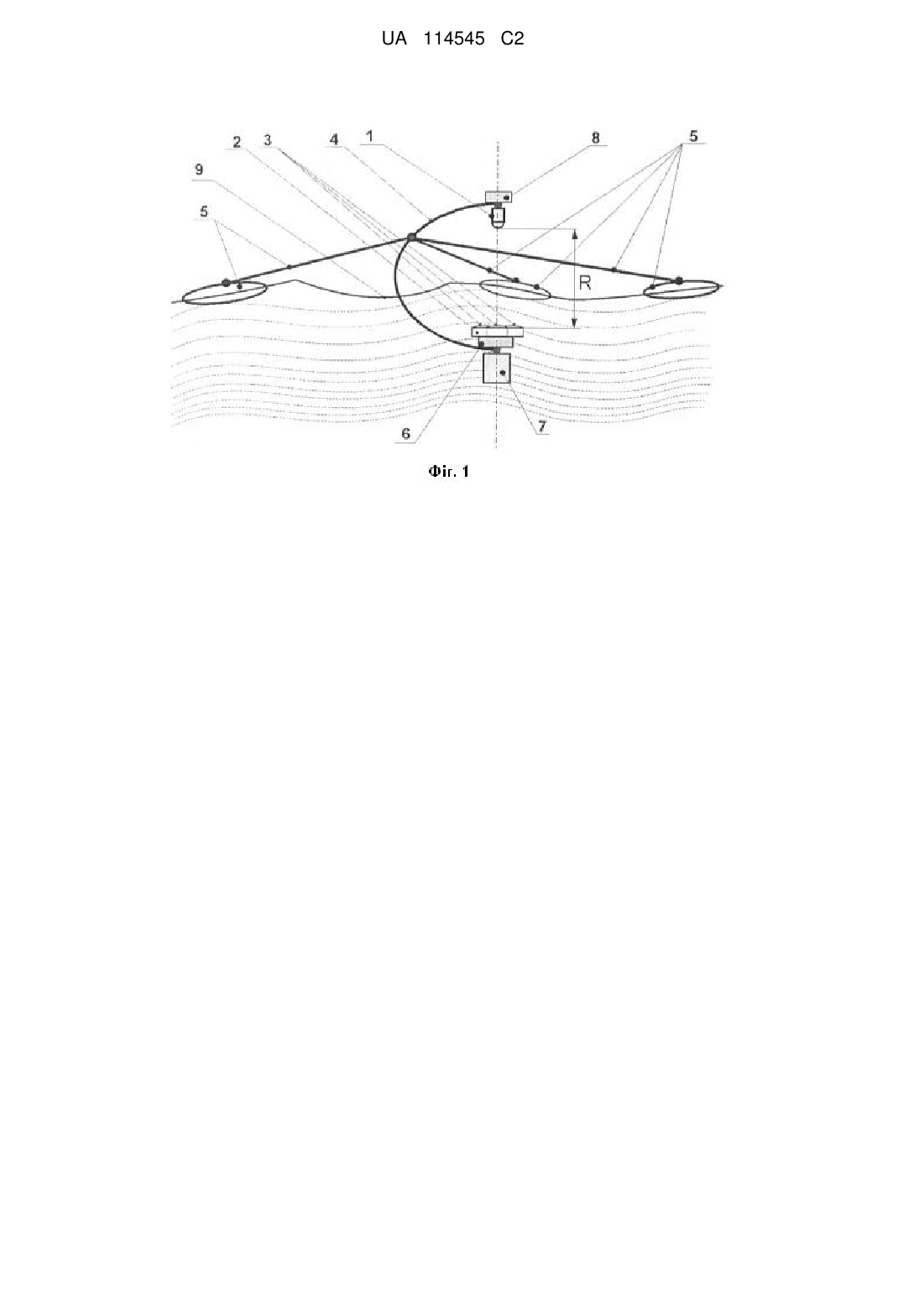
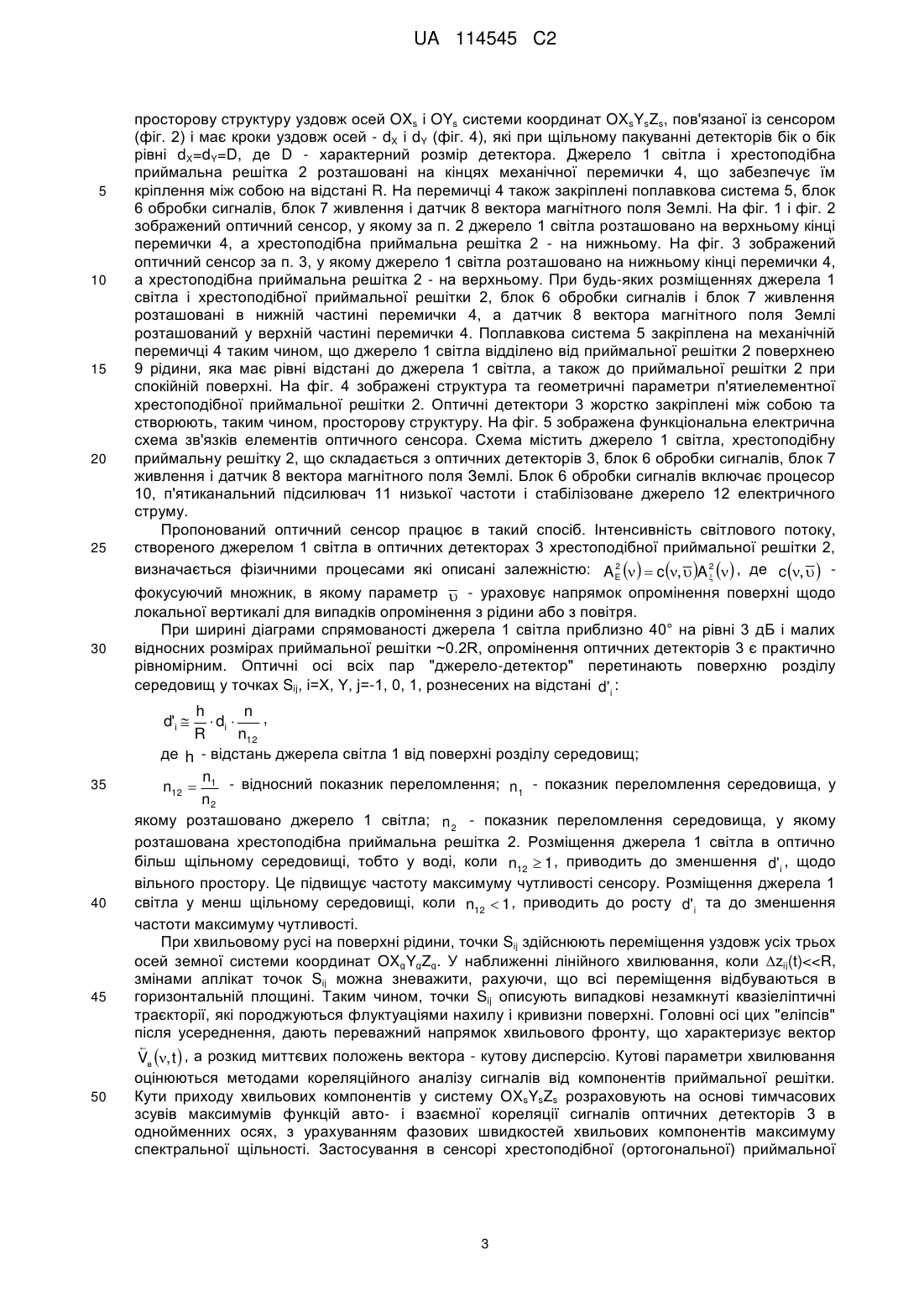
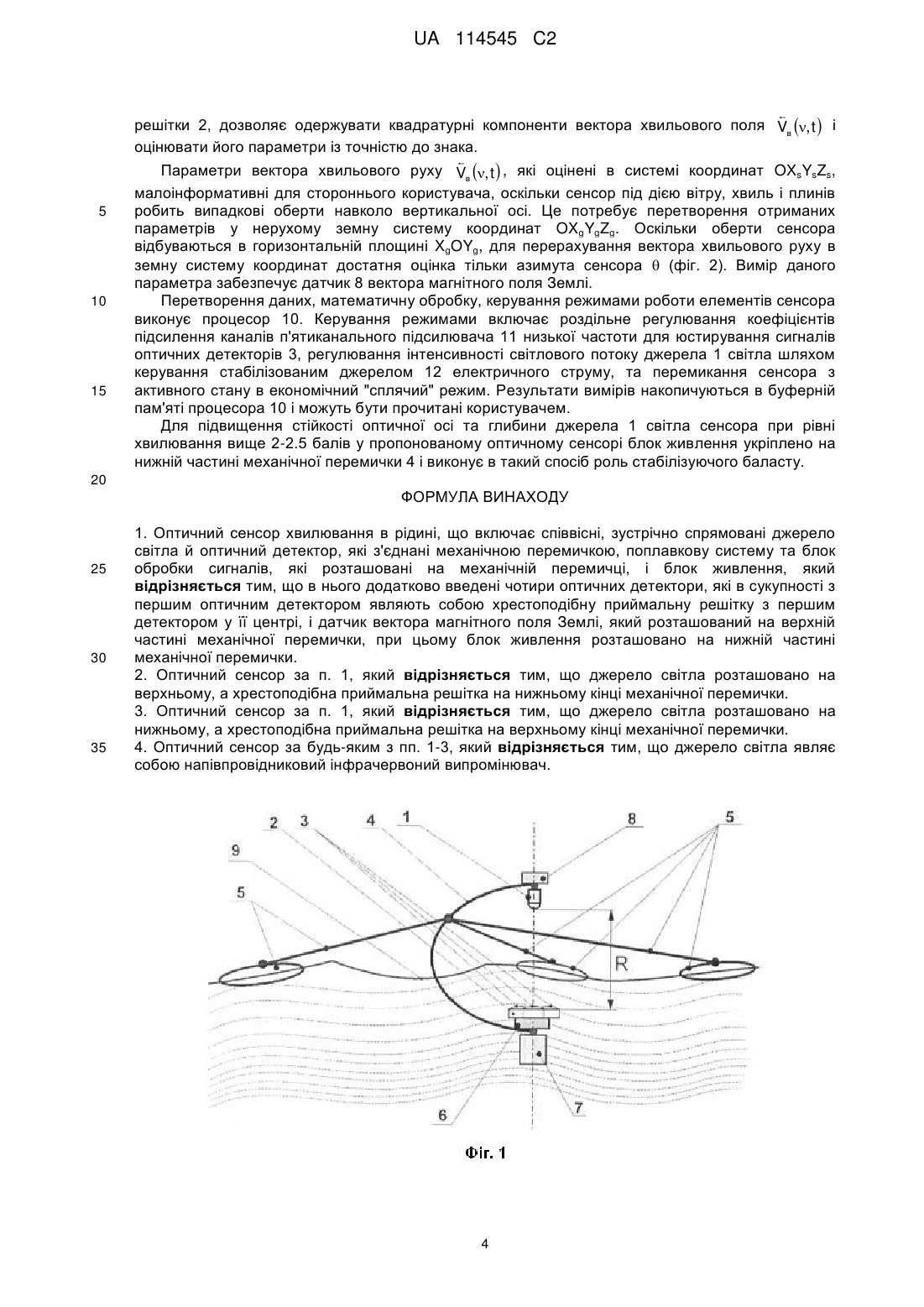
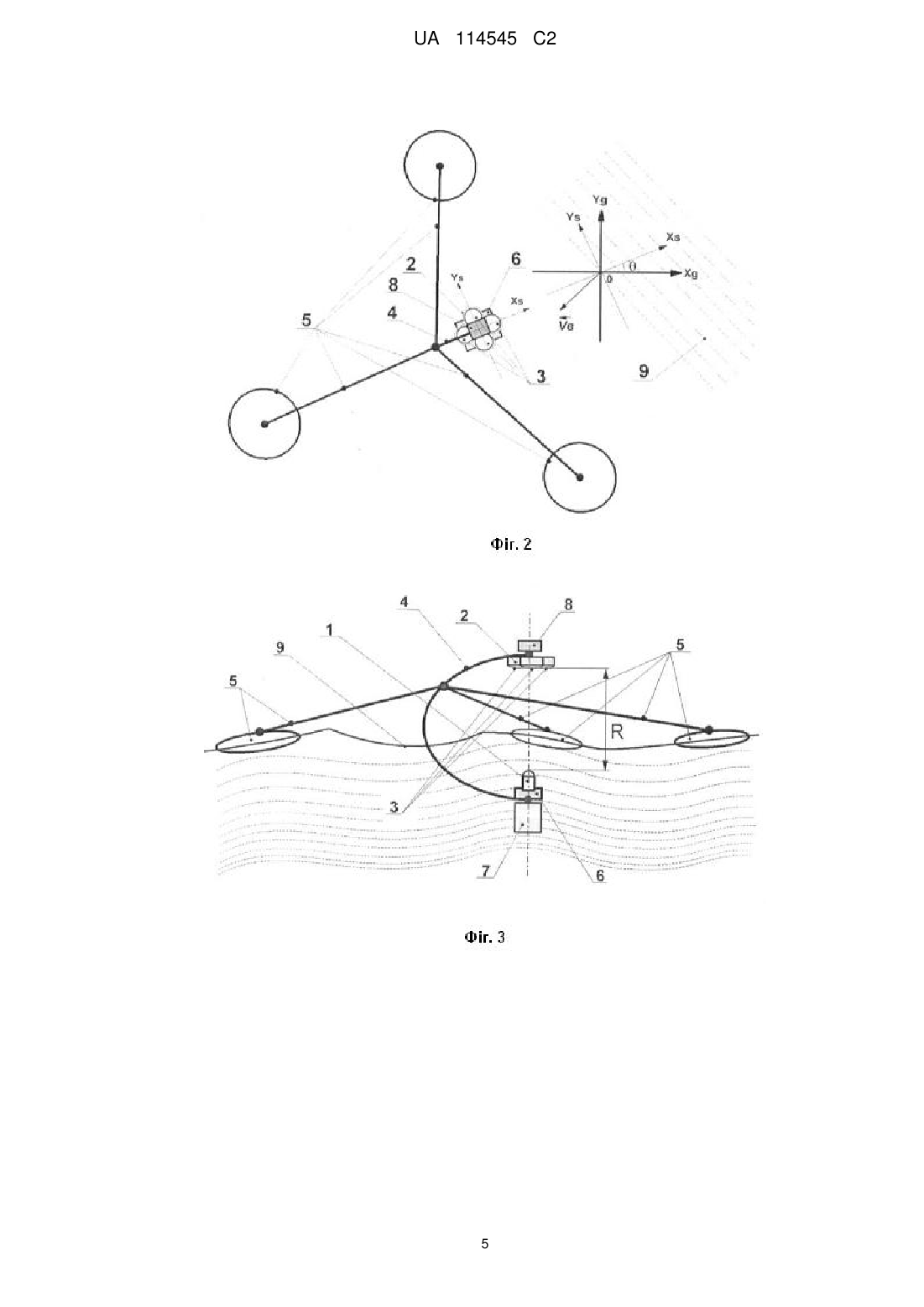
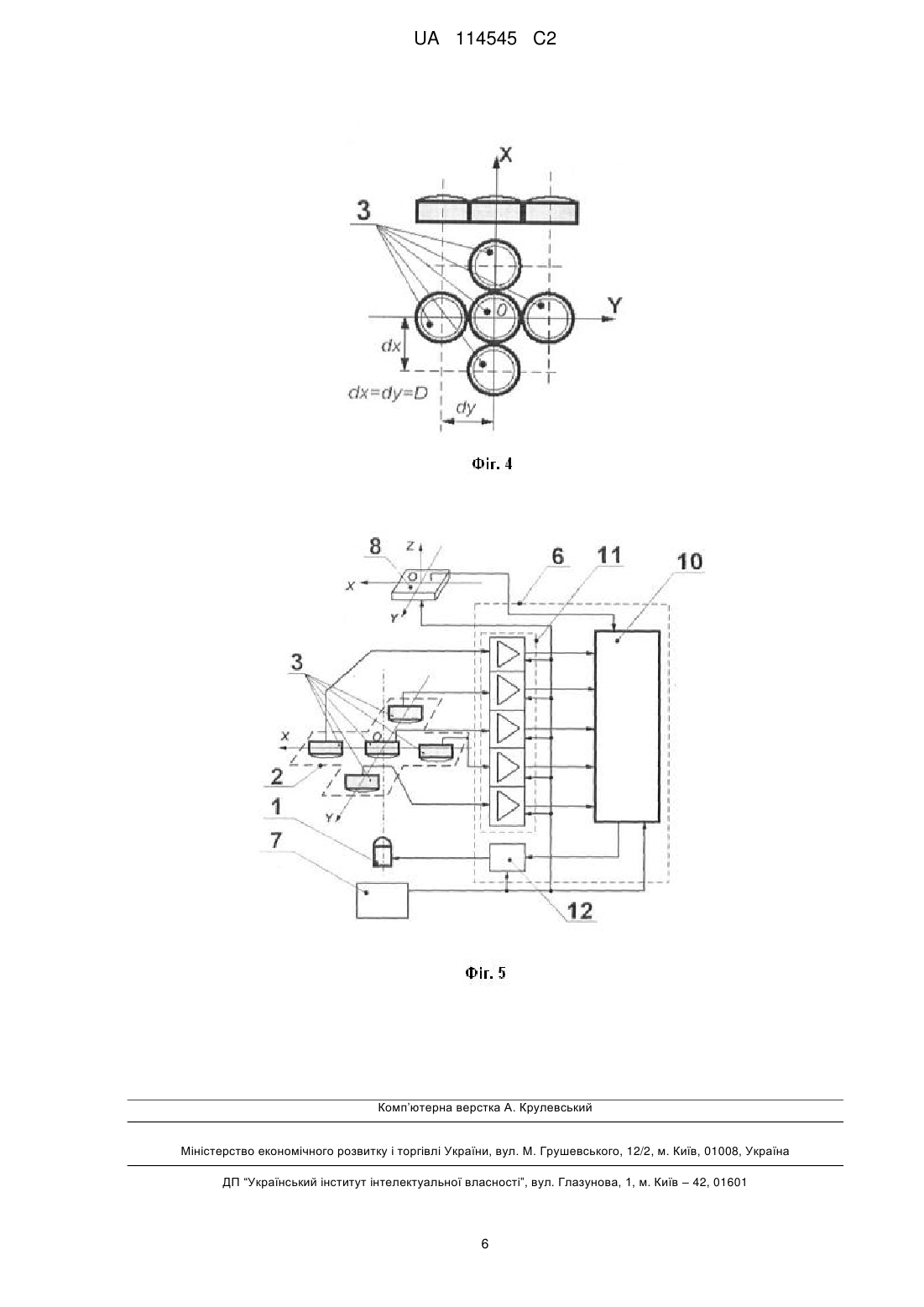
Реферат: Об'єкт винаходу: оптичний сенсор хвилювання в рідині. Галузь застосування: морські гідрофізичні дослідження, дистанційне зондування водної поверхні. Суть винаходу: завдяки використанню п'ятиелементної хрестоподібної приймальної решітки і датчика вектора магнітного поля Землі сенсор забезпечує оцінку кутових властивостей спектрів хвилювання в рідині у земній системи координат. Технічний результат: можливість отримання незміщених оцінок кутових спектрів гравітаційно-капілярного хвилювання на поверхні відкритих водоймищ і хвильових басейнів у земній системі координат. UA 114545 C2 (12) UA 114545 C2 UA 114545 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до неконтактних засобів контролю хвилювання в рідині в природних і лабораторних умовах, які можуть бути використані для одержання незміщених оцінок кутових спектрів гравітаційно-капілярного хвилювання в системах моніторингу морської поверхні. Просторові властивості гравітаційного хвилювання є важливими в судноводінні, морському будівництві та прогнозуванні штормів. Однак, у питаннях вивчення взаємодії тропосфери з морською поверхнею, виявлення забруднень і підсупутникового моніторингу безсумнівний інтерес представляють частотно-кутові спектри високочастотного діапазону морського хвилювання. У своїй більшості засоби хвилеграфічного контролю є скалярними сенсорами, що вимірюють параметри поверхні (аплікати або кути нахилу) у єдиній точці і мають відносно низьку граничну частоту контрольованого хвилювання. Це, як правило, обумовлено методичними або конструктивними причинами. Крім того, інерційність або повна нерухомість чутливих елементів хвилеграфічних систем приводить до виникнення доплерівського зсуву в оцінках спектральних параметрів високочастотних компонентів хвилювання, викликане орбітальними рухами брижі в полі гравітаційних хвиль. Ця помилка може бути врахована, якщо хвилеграф працює в широкому діапазоні частот хвиль - від самих довгих гравітаційних до капілярних. Створення таких пристроїв досить складне, оскільки характерні масштаби хвиль на краях зазначених діапазонів відрізняються на три порядки. Крім того, сенсори, що працюють у морських умовах, для забезпечення надійності, мають відносно складну та масивну конструкцію, а також високу вартість. Досить високочастотною системою, що має кутову чутливість і здатна працювати в умовах розвитого хвилювання, є струнний резистивний хвилеграф, описаний в (Коняев К.В., Назаров А.А. Измерение пространственно-временной структуры высокочастотных составляющих ветровых волн \ ФАО т.VI, № 1, 1970, с. 104-110). Даний хвилеграф є контактним і оцінює безпосередньо профіль хвилі згідно з величиною електричного опору струн, що залежить від глибини занурення. Хвилеграф містить 96-ти елементну двомірну решітку і має високе кутове розділення при максимумі роздільної здатності в діапазоні довжин хвиль 16-25 см. Недоліками струнного резистивного хвилеграфа є відносно низька верхня гранична частот ~45-50 Гц, яка обмежена властивостями рідини: в'язкістю і адгезією до матеріалу струн; та низька надійність, обумовлена вимогою високого й стабільного натягу струн, від якого залежить крутість і лінійність передатних характеристик струн, потреба в регулярних калібруваннях, крім того, на точність і частотні властивості хвилеграфа впливає наявність діелектричних забруднюючих речовин, що можуть перебувати на поверхні води, також як і більшість контактних систем даний хвилеграф конструктивно має бути закріплено до нерухомої опори. Хвилеграф, який має просторову чутливість і високу граничну частоту, є лазерний хвилеграф-ухилометр (P.A. Lange. Comparison between an amplitude measuring wire and slope measuring laser water wave gauge // Rev. Sci. Instrum. 53-1982. - №.5. - P. 651-655.). Хвилеграфухилометр вимірює. відхилення від вертикалі переломленого поверхнею вертикального лазерного променя, що залежить від кута ухилу поверхні води. Хвильовий профіль визначається шляхом інтегрування кута ухилу за часом. Відхилення променя, спрямованого знизу на схвильовану поверхню води, оцінюють за сигналами на двох квадратурних виходах плоскої оптичної приймальної матриці, пропорційних координатам точки, у яку він попадає. Ці сигнали відповідають проекціям градієнта поверхні на осі ОХ і OY матриці. Миттєвий азимут хвильового фронту визначають, як арктангенс відносини квадратурних сигналів. Хвилеграфухилометр є прецизійним вимірником хвиль в діапазоні частот від 0 до 300 Гц, має рівномірну амплітудно-частотну характеристику, а також високе просторове розрізнення в діапазоні гравітаційно-капілярних хвиль. Недоліками хвилеграфа-ухилометра є його висока складність, вага і висока ціна, зокрема, приймальної матриці. Також для штатної роботи хвилеграфа необхідне виконання ряду вимог, які припускають нерухомість хвилеграфа у цілому і його елементів, строге юстирування елементів оптичної системи, що гарантують положення променя у точці початку координат матриці при відсутності границі розділу середовищ та його строгу вертикальність. При недотриманні цих умов результати вимірів будуть непередбачуваними. Крім цього, оскільки розміри приймальної матриці обмежені (50-80 мм), а відстань від матриці до лазера пов'язана з цим розміром, зрозуміло що в природних умовах застосування хвилеграфа-уклонометра має приводити до виникнення спотворень та зсуву оцінок високочастотних спектрів. Найбільш близьким за технічною суттю до винаходу, що заявляється, та вибраним як прототип, є оптичний сенсор хвилювання в рідині, що включає співвісні, зустрічно-спрямовані джерело світла й оптичний детектор, з'єднані механічною перемичкою, поплавкову систему і блок обробки сигналів, які розташовані на механічній перемичці, і блок живлення, розташований 1 UA 114545 C2 5 у герметичному контейнері з нульовою плавучістю (Патент України № 93814 кл. G 01 С13/00, від 10.03.11 р.) В основі роботи сенсора лежить залежність між спектром флуктуацій підводної освітленості, створюваної світловим потоком, переломленим і сфокусованим водною поверхнею, зі спектром поверхневого хвилювання, що має вигляд: A 2E c A 2 , де c - фокусуючий множник, що залежить від частоти хвилювання , A 2E - спектр потужності флуктуацій підводної освітленості; 10 15 20 25 30 35 40 45 50 55 A 2 - енергетичний спектр поверхневого хвилювання (Шевернев В.И. Статистическая структура поля освещенности под взволнованной границей раздела/ ФАО. - 1973.- 9, № 6. - С. 596-607). Залежність множника c від частоти має резонансний характер, обумовлений тим, що завдяки фокусуванню, найбільшу амплітуду флуктуацій освітленості створює хвилювання з довжинами біля значення max . Ця довжина хвиль має назву "активної довжини хвиль". Відхилення від max приводить до розфокусування променів і зниження рівня освітленості. У роботі (Шевернев В.И. Статистическая структура поля освещенности под взволнованной границей раздела / ФАО. - 1973.- 9, № 6. - С. 596-607) розглянуто зв'язок енергетичних спектрів підводної освітленості зі спектрами морського хвилювання, коли джерело світла розташоване в повітрі. Подібний зв'язок існує також для флуктуацій надводної освітленості, коли джерело світла розташоване у воді, але у цьому випадку зросте швидкість спадання множника c при відхиленні від max , а також положення max зміститься вправо, тобто у бік високих частот. В обох випадках, вибираючи відповідним чином відстань між джерелом світла і оптичним детектором, можна настроїти сенсор на діапазон довжин хвиль, що цікавить. У роботі (Узленков А.В. Использование широкоугольной оптической системы для анализа капиллярного волнения в жидкости // Радиофизика и электроника. - Харьков: Ин-т радиофизики и электрон. НАН. Украины. - 2006. - 11, № 3. - С. 456-466) ця відстань становила близько 7 см, що забезпечило центральну частоту 180 Гц при смузі частот 18-210 Гц за рівнем – 3 дб і 5 - 280 Гц - за рівнем 18 дб. На практиці сенсор має вагу 50-70 грам, а також незначний опір повітряному потоку і добре зчеплення поплавкової системи з поверхнею води. Завдяки цьому, він здатний повторювати орбітальні рухи елементів води, на які він спирається у полі гравітаційних хвиль без помітного прослизання щодо водної поверхні і давати практично незміщені оцінки спектральної щільності високочастотних компонентів хвилювання. Недоліками сенсора є відсутність кутової чутливості, що пов'язано зі скалярним методом оцінки параметрів поверхні в єдиній "точці", тобто елементарній площадці, що зветься діафрагмою, через яку формується світловий потік, що виміряється і, а також відсутність орієнтації сенсора в земній системі координат, оскільки сенсор під впливом зовнішніх сил робить хаотичні оберти навколо своєї вертикальної осі. В основу винаходу поставлено задачу удосконалити оптичний сенсор хвилювання в рідині шляхом одночасної оцінки параметрів поверхні в декількох рознесених точках цієї поверхні та одночасної оцінки орієнтації сенсора відносно вектора магнітного поля Землі, що дає можливість отримання незміщених оцінок кутових спектрів гравітаційно-капілярного хвилювання на поверхні відкритих водоймищ і хвильових басейнів у земній системі координат. Поставлена задача вирішується тим, що в сенсор хвилювання в рідині, який включає співвісні зустрічно спрямовані джерело світла й оптичний детектор, які з'єднані механічною перемичкою, поплавкову систему та блок обробки сигналів, які розташовані на механічній перемичці, і блок живлення, додатково введені чотири оптичних детектори, які в сукупності з першим оптичним детектором являють собою хрестоподібну приймальну решітку з першим детектором у її центрі, і датчик вектора магнітного поля Землі, який розташований на верхній частині механічної перемички, при цьому блок живлення розташовано на нижній частині механічної перемички. Суть винаходу пояснюється кресленнями: на фіг. 1, фіг. 2, фіг. 3 зображений оптичний сенсор у різних проекціях і конфігураціях, на фіг.4 зображена конфігурація п'ятиелементної хрестоподібної приймальної решітки і на фіг. 5 - функціональна електрична схема оптичного сенсора. Оптичний сенсор (фіг. 1, фіг. 2, фіг. 3) містить джерело 1 світла і хрестоподібну приймальну решітку 2, що складається з п'яти оптичних детекторів 3, що утворюють хрестоподібну 2 UA 114545 C2 5 10 15 20 25 30 просторову структуру уздовж осей OXs і OYs системи координат OXsYsZs, пов'язаної із сенсором (фіг. 2) і має кроки уздовж осей - dX і dY (фіг. 4), які при щільному пакуванні детекторів бік о бік рівні dX=dY=D, де D - характерний розмір детектора. Джерело 1 світла і хрестоподібна приймальна решітка 2 розташовані на кінцях механічної перемички 4, що забезпечує їм кріплення між собою на відстані R. На перемичці 4 також закріплені поплавкова система 5, блок 6 обробки сигналів, блок 7 живлення і датчик 8 вектора магнітного поля Землі. На фіг. 1 і фіг. 2 зображений оптичний сенсор, у якому за п. 2 джерело 1 світла розташовано на верхньому кінці перемички 4, а хрестоподібна приймальна решітка 2 - на нижньому. На фіг. 3 зображений оптичний сенсор за п. 3, у якому джерело 1 світла розташовано на нижньому кінці перемички 4, а хрестоподібна приймальна решітка 2 - на верхньому. При будь-яких розміщеннях джерела 1 світла і хрестоподібної приймальної решітки 2, блок 6 обробки сигналів і блок 7 живлення розташовані в нижній частині перемички 4, а датчик 8 вектора магнітного поля Землі розташований у верхній частині перемички 4. Поплавкова система 5 закріплена на механічній перемичці 4 таким чином, що джерело 1 світла відділено від приймальної решітки 2 поверхнею 9 рідини, яка має рівні відстані до джерела 1 світла, а також до приймальної решітки 2 при спокійній поверхні. На фіг. 4 зображені структура та геометричні параметри п'ятиелементної хрестоподібної приймальної решітки 2. Оптичні детектори 3 жорстко закріплені між собою та створюють, таким чином, просторову структуру. На фіг. 5 зображена функціональна електрична схема зв'язків елементів оптичного сенсора. Схема містить джерело 1 світла, хрестоподібну приймальну решітку 2, що складається з оптичних детекторів 3, блок 6 обробки сигналів, блок 7 живлення і датчик 8 вектора магнітного поля Землі. Блок 6 обробки сигналів включає процесор 10, п'ятиканальний підсилювач 11 низької частоти і стабілізоване джерело 12 електричного струму. Пропонований оптичний сенсор працює в такий спосіб. Інтенсивність світлового потоку, створеного джерелом 1 світла в оптичних детекторах 3 хрестоподібної приймальної решітки 2, 2 визначається фізичними процесами які описані залежністю: A E c , A 2 , де c , фокусуючий множник, в якому параметр - ураховує напрямок опромінення поверхні щодо локальної вертикалі для випадків опромінення з рідини або з повітря. При ширині діаграми спрямованості джерела 1 світла приблизно 40° на рівні 3 дБ і малих відносних розмірах приймальної решітки ~0.2R, опромінення оптичних детекторів 3 є практично рівномірним. Оптичні осі всіх пар "джерело-детектор" перетинають поверхню розділу середовищ у точках Sij, і=X, Y, j=-1, 0, 1, рознесених на відстані d' i : h n , di R n12 де h - відстань джерела світла 1 від поверхні розділу середовищ; n n12 1 - відносний показник переломлення; n1 - показник переломлення середовища, у n2 якому розташовано джерело 1 світла; n 2 - показник переломлення середовища, у якому розташована хрестоподібна приймальна решітка 2. Розміщення джерела 1 світла в оптично більш щільному середовищі, тобто у воді, коли n12 1 , приводить до зменшення d' i , щодо вільного простору. Це підвищує частоту максимуму чутливості сенсору. Розміщення джерела 1 світла у менш щільному середовищі, коли n12 1 , приводить до росту d' i та до зменшення частоти максимуму чутливості. При хвильовому русі на поверхні рідини, точки Sij здійснюють переміщення уздовж усіх трьох осей земної системи координат OXgYgZg. У наближенні лінійного хвилювання, коли zij(t)
ДивитисяДодаткова інформація
Автори англійськоюUzlenkov Oleksandr Valentynovych
Автори російськоюУзленков Александр Валентинович
МПК / Мітки
МПК: G01C 13/00
Мітки: оптичний, хвилювання, рідини, сенсор
Код посилання
<a href="https://ua.patents.su/8-114545-optichnijj-sensor-khvilyuvannya-v-ridini.html" target="_blank" rel="follow" title="База патентів України">Оптичний сенсор хвилювання в рідині</a>
Оптичний сенсор хвилювання в рідині
Номер патенту: 93814
Опубліковано: 10.03.2011
Автор: Узленков Олександр Валентинович
МПК: G01C 13/00
Мітки: рідини, оптичний, хвилювання, сенсор
Формула / Реферат:
1. Оптичний сенсор хвилювання в рідині, що включає джерело світла і оптичний детектор, відокремлені один від одного поверхнею рідини, блок живлення в герметичному контейнері та блок обробки і передачі сигналів, який відрізняється тим, що в нього додатково введена механічна перемичка, що з'єднує джерело світла з оптичним детектором так, що їх оптичні осі суміщені і зустрічно спрямовані, на якій закріплена поплавкова система, що забезпечує...
Оптичний сенсор хвилювання в рідині
Номер патенту: 53387
Опубліковано: 11.10.2010
Автор: Узленков Олександр Валентинович
МПК: G01H 9/00
Мітки: оптичний, хвилювання, рідини, сенсор
Формула / Реферат:
1. Оптичний сенсор хвилювання в рідині, що включає джерело світла і оптичний детектор, відокремлені один від одного поверхнею рідини, блок живлення в герметичному контейнері, блок обробки і передачі сигналів, який відрізняється тим, що в нього додатково введена механічна перемичка, що з'єднує джерело світла з оптичним детектором так, що їх оптичні осі суміщені і зустрічно спрямовані, і на якій закріплена поплавкова система, що забезпечує...
Оптичний сенсор концентрації газу
Номер патенту: 61667
Опубліковано: 25.07.2011
Автори: Гладишевський Володимир Романович, Книш Богдан Петрович, Білинський Йосип Йосипович
МПК: G01N 21/81
Мітки: оптичний, газу, концентрації, сенсор
Формула / Реферат:
Оптичний сенсор концентрації газу, що містить оптично зв'язані два джерела інфрачервоного випромінювання з довжинами хвиль випромінювання в максимумах, що співпадають з максимумом смуги власного поглинання аналізованого газу, приймач інфрачервоного випромінювання, вхідного і вихідного газових патрубків, причому патрубки робочої кювети мають однакові або різні діаметри отворів, джерело інфрачервоного випромінювання, розміщене на одній осі з...
Мікроелектронний оптичний сенсор температури
Номер патенту: 41612
Опубліковано: 25.05.2009
Автори: Яремчук Володимир Федорович, Кравчук Наталія Сергіївна, Смішний Сергій Миколайович
МПК: G01K 11/00
Мітки: сенсор, температури, оптичний, мікроелектронний
Формула / Реферат:
Мікроелектронний оптичний сенсор температури, який містить джерело світла, фотоприймач, з'єднані світловодом, що має серцевину, оточену оболонкою, і термочутливий елемент, введено перетворювач оптичного сигналу в частотний, який містить два назустріч ввімкнених фотодіоди, конденсатор і індуктивний елемент, під'єднані паралельно фотодіодом, аноди яких з'єднані, при цьому катод першого фотодіода під'єднаний до першого виводу першого...
Оптичний сенсор фізичних величин
Номер патенту: 36529
Опубліковано: 27.10.2008
Автори: Кабацій Василь Миколайович, Кабацій Микола Михайлович, Мигалина Юрій Вікентійович
МПК: G01K 11/00, G01D 9/00, G01D 4/00
Мітки: оптичний, фізичних, величин, сенсор
Формула / Реферат:
Оптичний сенсор фізичних величин, що містить корпус, оптично зв'язані джерело випромінювання, фотоприймач, активний елемент, виконаний із халькогенідного склоподібного напівпровідника, який відрізняється тим, що корпус містить прозорі для світлового потоку, створеного джерелом випромінювання, вхідне і вихідне вікна, бокові сторони корпуса розміщені під кутом до активного елементу і мають дзеркальну внутрішню поверхню, активний елемент...
Попередній патент: Безконтактний двигун постійного струму
Наступний патент: Спосіб сепарації сипучої суміші у текучому середовищі та пристрій для його здійснення
Випадковий патент: Форсунка з суцільним конусом розпилу