Пристрій для вимірювання фазового зсуву

Формула / Реферат
Пристрій для вимірювання фазового зсуву між двома гармонічними сигналами, що містить підсилювач, схему вирівнювання амплітуд гармонічних сигналів з двома входами, які є входами пристрою для вимірювання фазового зсуву, та двома виходами, послідовно з'єднані перший диференціатор, перший компаратор і перший одновібратор, послідовно з'єднані другий компаратор та другий одновібратор, дисплей, мікроконтролер з вбудованими аналого-цифровим перетворювачем, оперативною пам'яттю, двома аналоговими входами, що почергово під'єднуються до входу аналого-цифрового перетворювача програмним шляхом та двома цифровими входами, що програмуються на ввід інформації, та почергово програмним шляхом опитуються мікроконтролером, причому перший вихід схеми вирівнювання амплітуд під'єднаний до входу першого диференціатора та до першого аналогового входу мікроконтролера, вхід дисплея під'єднано до виходу мікроконтролера, який відрізняється тим, що додатково містить генератор комутаційної напруги, послідовно з'єднані комутатор, що має два входи, один вихід та один керуючий вхід, селективний підсилювач, синхронний детектор, вихід якого під'єднано до входу підсилювача, вихід якого, в свою чергу, під'єднано до другого аналогового входу мікроконтролера та входу другого диференціатора, причому до першого входу комутатора під'єднано перший вихід схеми вирівнювання амплітуд, до другого входу комутатора під'єднано другий вихід схеми вирівнювання амплітуд, вихід другого диференціатора під'єднано до входу другого компаратора, вихід генератора комутаційної напруги під'єднано до керуючого входу комутатора, вихід першого одновібратора під'єднано до першого цифрового входу мікроконтролера, вихід другого одновібратора під'єднано до другого цифрового входу мікроконтролера, а покази дисплея є показами пристрою вимірювання фазового зсуву між вхідними гармонічними сигналами.
Текст
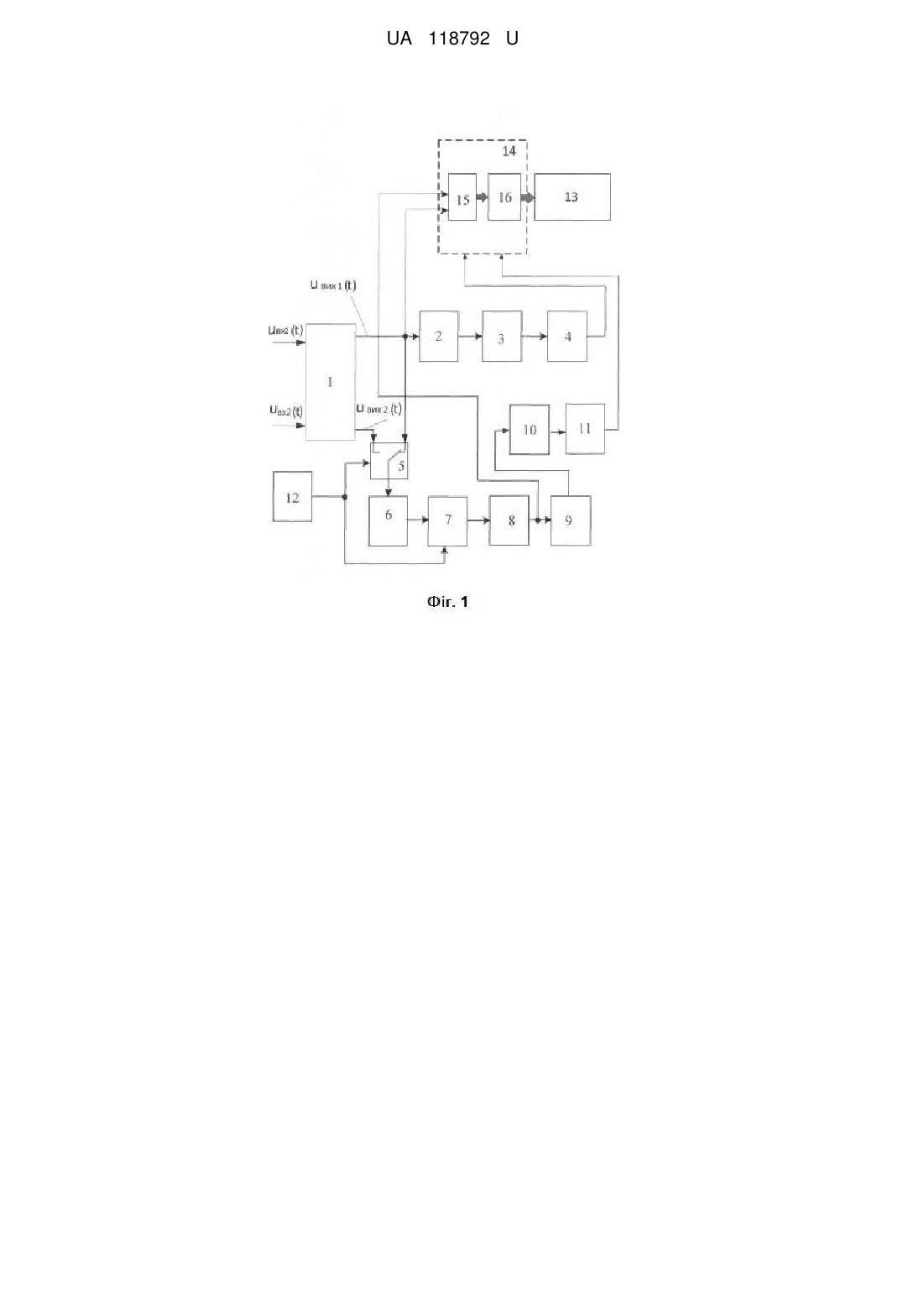
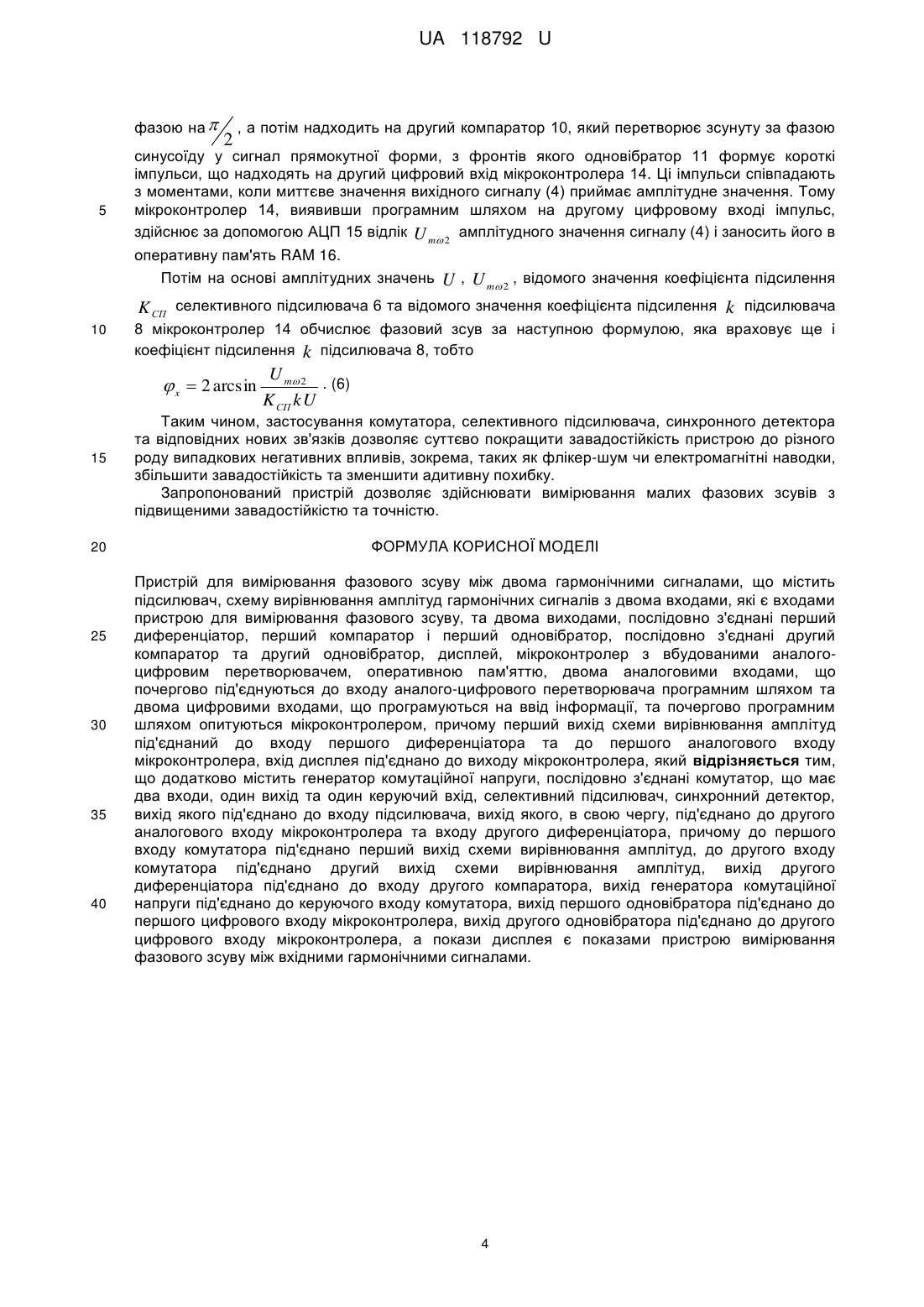
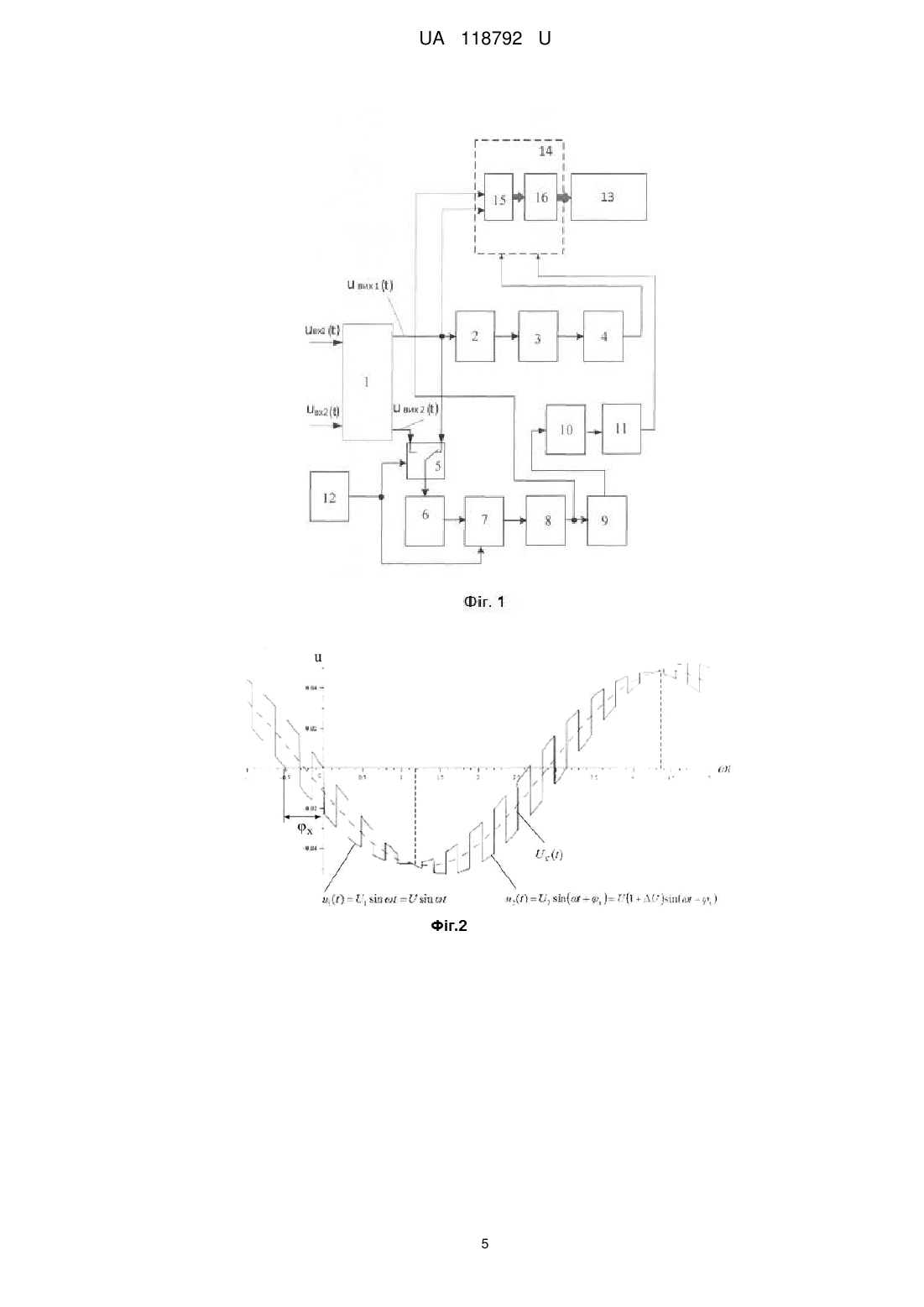
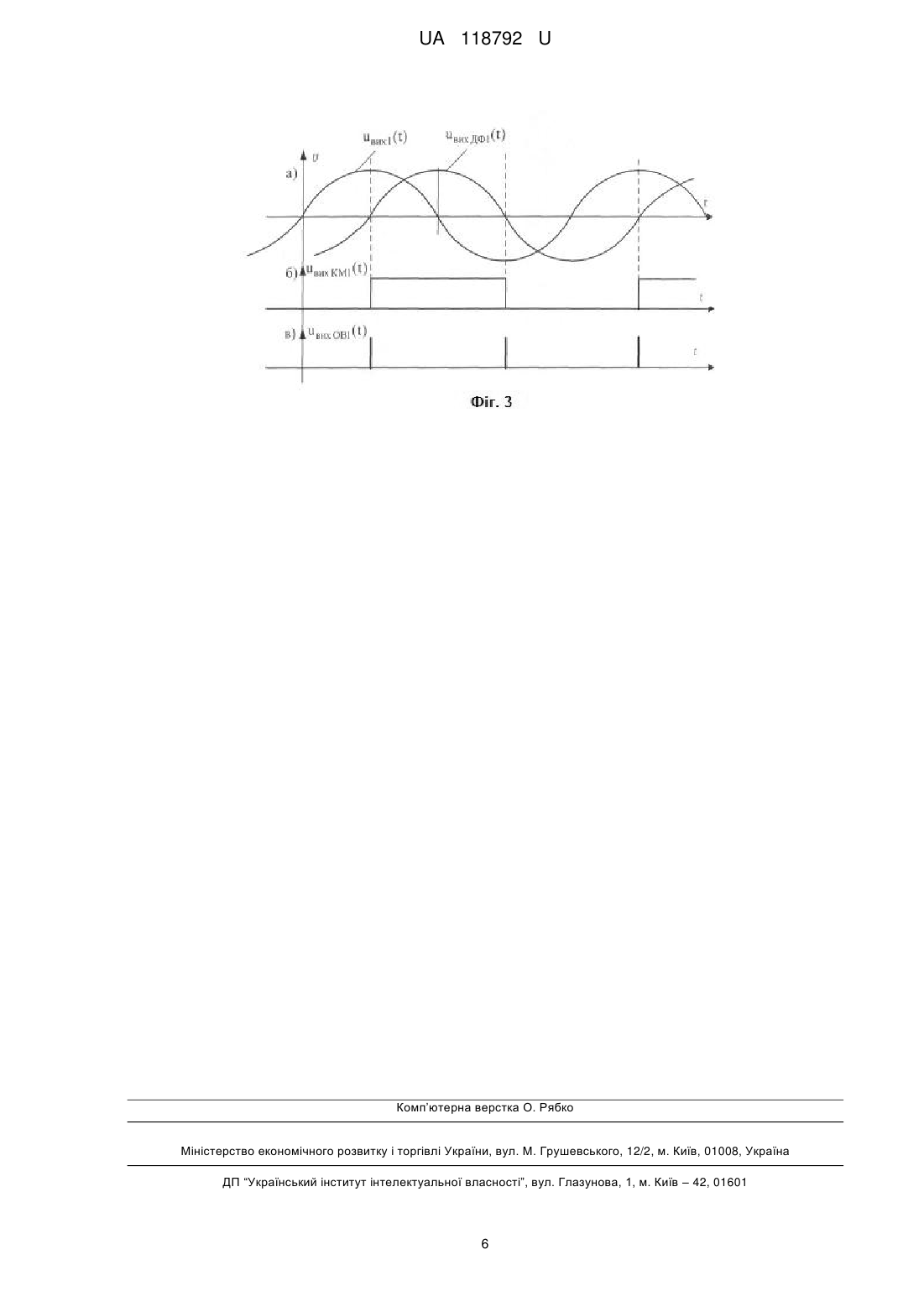
Реферат: UA 118792 U UA 118792 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до техніки вимірювання фазових зсувів між двома гармонічними сигналами з різними амплітудами і може бути використана для підвищення чутливості перетворювачів фазового зсуву в цифровий код, що застосовуються в системах електророзвідки родовищ поліметалічних руд, системах діагностики корозійного стану великогабаритних сталевих листових конструкцій тощо. Відомий пристрій для вимірювання фазового зсуву між двома гармонічними сигналами з різними амплітудами, придатний для застосування в системах електророзвідки родовищ поліметалічних руд та руд з феромагнітними властивостями, в системах діагностики корозійного стану великогабаритних сталевих листових конструкцій, що містить послідовно з'єднані диференціатор, перший компаратор, перший одновібратора та логічну схему АБО, послідовно з'єднані другий компаратор та другий одновібратор, мікроконтролер, у якому міститься аналогоцифровий перетворювач (АЦП) та оперативна пам'ять RAM, та дисплей, причому вихід другого одновібратора під'єднано до другого входу логічної схеми АБО, вихід логічної схеми АБО під'єднано до входу запуску АЦП мікроконтролера, вимірювальний вхід АЦП мікроконтролера під'єднано до входу диференціатора, вхід дисплея під'єднано до виходу мікроконтролера, входи диференціатора та другого компаратора є входами пристрою, а покази дисплея є виходом пристрою [Спосіб вимірювання фазового зсуву: Патент на корисну модель №104350 UA, МПК G01R 25/00 / Бучма І.М., Дронь М.І.(Україна).-№ Заявки: u201506942; Заявлено 13.07.2015; Опубл. 25.01.2016, Бюл. №2, 2О16. - 4с]. Однак такий пристрій вимірюванням фазового зсуву характеризується невисокою завадостійкістю та значною адитивною похибкою, що визначається впливом низькочастотного флікер-шуму. Відомий пристрій для вимірювання фазового зсуву між двома гармонічними сигналами, придатний для застосування в системах електророзвідки родовищ поліметалічних руд та руд з феромагнітними властивостями, в системах діагностики корозійного стану великогабаритних сталевих листових конструкцій, що містить схему вирівнювання амплітуд сигналів, що має два входи і два виходи, різницеву схему, послідовно з'єднані перший диференціатор, перший компаратор та перший одновібратор, двовходову логічну схему АБО, підсилювач, дисплей, мікроконтролер, в якому міститься аналого-цифровий перетворювач (АЦП) та оперативна пам'ять RAM, і який має два аналогових входи, які програмним шляхом можуть з'єднуватися з входом АЦП, вхід запуску АЦП та вихід цифрових даних, послідовно з'єднані другий компаратор та другий одновібратор, причому перший вихід схеми вирівнювання амплітуд під'єднаний до входів першого диференціатора, першого входу різницевої схеми та першого аналогового входу мікроконтролера, другий вихід схеми вирівнювання амплітуд під'єднаний до входу другого компаратора та другого входу різницевої схеми, вихід різницевої схеми під'єднаний до входу підсилювача, вихід підсилювача під'єднаний до другого аналогового входу мікроконтролера, вихід логічної схеми АБО під'єднаний до входу запуску АЦП мікроконтролера, цифровий вихід мікроконтролера з'єднаний з входом дисплея, на якому висвічується результат вимірювання, а входи схеми вирівнювання амплітуд є входами пристрою. Однак такий пристрій вимірювання фазового зсуву між інфранизькочастотними гармонічними сигналами також характеризується не високою завадостійкістю та значною адитивною похибкою, що зумовлена впливом флікер-шуму. [Патент на корисну модель №104350 UA Україна, МПК G01R 25/00; G01R 27/28(2006.01) Спосіб вимірювання фазового зсуву / Бучма І.М., (Україна). - № Заявки: u201604090; Заявлено 14.04.2016; Опубл. 25.01.2016, Бюл. № 2, 2016. - 4 с.]. В основу корисної моделі поставлено задачу створення пристрою для вимірювання фазового зсуву між інфранизькочастотними гармонічними сигналами з вищими завадостійкістю та точністю, що дає можливість збільшити глибинність досліджень системами електророзвідки родовищ поліметалічних руд, а також руд з феромагнітними властивостями та підвищити достовірність систем обстеження корозійного стану великогабаритних конструкцій з листової сталі. Поставлена задача вирішується тим, що в пристрій для вимірювання фазового зсуву між двома гармонічними сигналами, що містить схему вирівнювання амплітуд сигналів, яка має два входи і два виходи, послідовно з'єднані перший диференціатор, перший компаратор та перший одновібратор, підсилювач, дисплей, мікроконтролер, в якому міститься аналога цифровий перетворювач (АЦП) та оперативна пам'ять RAM, і який має два аналогових входи, які програмним шляхом можуть з'єднуватися з входом АЦП, та два цифрових входи, які можуть програмуватися на ввід та вивід даних, послідовно з'єднані другий компаратор та другий одновібратор, причому перший вихід схеми вирівнювання амплітуд під'єднаний до входу першого диференціатора та першого аналогового входу мікроконтролера, цифровий вихід 1 UA 118792 U 5 10 15 20 25 30 35 40 45 50 мікроконтролера під'єднаний до відповідного входу дисплея, покази якого як і цифровий вихід мікроконтролера є виходами пристрою, а входи схеми вирівнювання амплітуд є входами пристрою, згідно з корисною моделлю, додатково містить послідовно з'єднані аналоговий комутатор, що має два входи і один вихід, селективний підсилювач та синхронний детектор, генератор комутаційної напруги та другий диференціатор, причому перший вихід схеми вирівнювання амплітуд під'єднаний до першого входу комутатора, другий вихід схеми вирівнювання амплітуд під'єднаний до другого входу комутатора, вихід синхронного детектора під'єднаний до входу підсилювача, вихід якого під'єднаний до входу другого диференціатора та другого аналогового входу мікроконтролера, вихід другого диференціатора під'єднаний до входу другого компаратора, вихід першого одновібратора під'єднаний до першого цифрового входу мікроконтролера, вихід другого одновібратора під'єднаний до другого цифрового входу мікроконтролера, а вихід генератора комутаційної напруги під'єднаний до керуючих входів комутатора та синхронного детектора. При вимірюванні фазового зсуву між інфранизькочастотними гармонічними сигналами флікер-шум, що створюється джерелами напруг чи струмів, наприклад, джерелом живлення чотириплечого моста або напівмоста, зумовлює адитивну похибку, яка визначає поріг чутливості пристрою. Щоб зменшити адитивну похибку, зумовлену флікер-шумом необхідно зменшити вплив флікер-шуму на результат вимірювання. Використання частоти перемикань комутатора набагато більшої ніж частота порівнюваних сигналів дає можливість використати високу добротність селективного підсилювача та високу завадостійкість синхронного детектора і цим збільшити завадостійкість пристрою загалом та зменшити вплив флікер-шуму на адитивну похибку вимірювання фазового зсуву зокрема. Пристрій пояснюється кресленнями. На Фіг. 1 зображено структурну схему пристрою для вимірювання фазового зсуву, на Фіг. 2 часову діаграму вихідного сигналу комутатора, на Фіг. 3 - часові діаграми сигналів, що пояснюють процес вимірювання амплітуди. Пристрій для вимірювання фазового зсуву складається з схеми вирівнювання амплітуд 1 порівнюваних сигналів, що має два входи та два виходи, послідовно з'єднаних першого диференціатора 2, першого компаратора 3, та першого одновібратора 4, послідовно з'єднаних аналогового комутатора 5, що має два входи, один вихід і один керуючий вхід, селективного підсилювача 6, синхронного детектора 7, підсилювача 8, другого диференціатора 9, другого компаратора 10 та другого одновібратора 11, генератора комутаційної напруги 12, дисплея 13, мікроконтролера 14, що має аналого-цифровий перетворювач 15, оперативну пам'ять RAM 16, два аналогових входи, два цифрових входи та цифровий вихід, у якому перший вихід схеми вирівнювання амплітуд 1 під'єднаний до входу першого диференціатора 2, першого аналогового входу мікроконтролера 14 та першого входу аналогового комутатора 5, другий вихід схеми вирівнювання амплітуд 1 під'єднаний до другого входу аналогового комутатора 5, вихід генератора комутаційної напруги 12 під'єднаний до керуючих входів комутатора 5 та синхронного детектора 7, вихід підсилювача 8 під'єднаний до другого аналогового входу мікроконтролера 14, вихід першого одновібратора 4 під'єднаний до першого цифрового входу мікроконтролера 14, вихід другого одновібратора 11 під'єднаний до другого цифрового входу мікроконтролера 14, цифровий вихід мікроконтролера 14 під'єднаний до входу дисплея 13, на якому висвітлюються результати вимірювання, а входи схеми вирівнювання амплітуд 1 є входами пристрою. Вхідні сигнали u вх1 t та uвх1 t надходять на схему вирівнювання амплітуд 1. З першого та другого виходів схеми вирівнювання амплітуд 1 знімаються сигнали uвх1 t та uвх1 t (фіг. 1). За відсутності схеми вирівнювання амплітуд вхідні сигнали надходили б на відповідні входи автоматичного комутатора 5, що керується імпульсною напругою з виходу генератора комутаційної напруги 12, яку можна описати виразом uк t U к sign sin t (1) де - кругова частота основної гармоніки комутуючої напруги. З врахуванням (1) вихідний сигнал комутатора 5, можна подати виразом (2) uvк t U 2 U1 U 2 U1 1 sign sin t 2 U 2 U1 sin t x 1 sign sin t 2 2 , (2) UA 118792 U U 1 та U 2 - амплітуди відповідно першого та другого сигналів; - кругова частота сигналів; x - зсув фаз між сигналами. В нашому випадку прийнято, що . Тоді вигляд сигналу (2) буде таким, як на фіг. 2. де З фіг. 2 можна побачити, що цей сигнал, можна описати іншим виразом 5 U1 sin x U 2 sin x 1 2 2 2 uvк t U12 U 2 2U1U 2 cos x sin t x arctg x x 2 2 U1 cos U 2 cos 2 2 U 2 sin x 1 2 U12 U 2 2U1U 2 cos x sin t arctg sign sin t . 2 U1 U 2 cos x Оскільки вхідні сигнали u вх1 t та uвх 2 t надходять на схему вирівнювання амплітуд 1, яка, не змінюючи фазового зсуву між сигналами, вирівнює їх амплітуди, то з врахуванням цього останній вираз спроститься до такого вигляду 10 uvк t U cos x sin t x U sin x sin t x sign sin t . (3) 2 2 2 2 2 Перша гармоніка другого доданку виразу (3) виділяється селективним підсилювачем 6. Вона являє собою балансно-модульований сигнал, обвідна якого є гармонічним сигналом частотою . Цей балансно-модульований сигнал надходить на синхронний детектор 7, де після 15 перемноження з функцію наступним виразом K СП U sin signsin t і фільтрації отримуємо обвідну, яку можна подати x sin t x . (4) 2 2 2 З (4) видно, що амплітуда обвідної дорівнює U m 2 K СПU sin x , 2 де K СП - коефіцієнт передачі селективного підсилювача. 20 Вимірявши U m 2 обвідної (4) та амплітуду U одного з вихідних сигналів, наприклад uвих1 t , схеми вирівнювання амплітуд 1 при відомому значенні коефіцієнта підсилення K СП селективного підсилювача 6 з останнього виразу можна визначити фазовий зсув за формулою x 2 arcsin U m 2 . (5) K СП U Щоб виміряти амплітуду 25 U вихідного сигналу uвих1 t схеми вирівнювання амплітуд 1 (фіг. 3 (а)), цей сигнал одночасно подається на перший аналоговий вхід мікроконтролера 14 та вхід першого диференціатора 2, де зсувається за фазою на 2 ( u вихДФ1 t фіг. 3 (а)), а потім надходить на перший компаратор 3, який перетворює зсунуту за фазою синусоїду у сигнал прямокутної форми ( u вихКМ 1 t фіг. 3 (б)), з фронтів якого одновібратор 4 формує короткі імпульси ( u вихОВ1 t фіг. 3 (в)), що надходять на перший цифровий вхід мікроконтролера 14. Ці 30 35 імпульси співпадають з моментами, коли миттєве значення вихідного сигналу uвих1 t (фіг. 3 (а)) схеми вирівнювання амплітуд 1 приймає амплітудне значення. Тому мікроконтролер 14, виявивши програмним шляхом на першому цифровому вході імпульс, здійснює за допомогою АЦП 15 відлік амплітудного значення U вихідного сигналу uвих1 t схеми вирівнювання амплітуд 1 і заносить його в оперативну пам'ять RAM 16. Аналогічним чином, щоб виміряти амплітуду U m 2 сигналу сигнал (4), він з виходу синхронного детектора 7 після підсилення підсилювачем 8 одночасно подається на другий аналоговий вхід мікроконтролера 14 та на вхід другого диференціатора 9 де зсувається за 3 UA 118792 U фазою на 5 2 , а потім надходить на другий компаратор 10, який перетворює зсунуту за фазою синусоїду у сигнал прямокутної форми, з фронтів якого одновібратор 11 формує короткі імпульси, що надходять на другий цифровий вхід мікроконтролера 14. Ці імпульси співпадають з моментами, коли миттєве значення вихідного сигналу (4) приймає амплітудне значення. Тому мікроконтролер 14, виявивши програмним шляхом на другому цифровому вході імпульс, здійснює за допомогою АЦП 15 відлік U m 2 амплітудного значення сигналу (4) і заносить його в оперативну пам'ять RAM 16. Потім на основі амплітудних значень K СП 10 U , U m 2 , відомого значення коефіцієнта підсилення селективного підсилювача 6 та відомого значення коефіцієнта підсилення k підсилювача 8 мікроконтролер 14 обчислює фазовий зсув за наступною формулою, яка враховує ще і коефіцієнт підсилення k підсилювача 8, тобто x 2 arcsin 15 20 25 30 35 40 U m 2 . (6) K СП kU Таким чином, застосування комутатора, селективного підсилювача, синхронного детектора та відповідних нових зв'язків дозволяє суттєво покращити завадостійкість пристрою до різного роду випадкових негативних впливів, зокрема, таких як флікер-шум чи електромагнітні наводки, збільшити завадостійкість та зменшити адитивну похибку. Запропонований пристрій дозволяє здійснювати вимірювання малих фазових зсувів з підвищеними завадостійкістю та точністю. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для вимірювання фазового зсуву між двома гармонічними сигналами, що містить підсилювач, схему вирівнювання амплітуд гармонічних сигналів з двома входами, які є входами пристрою для вимірювання фазового зсуву, та двома виходами, послідовно з'єднані перший диференціатор, перший компаратор і перший одновібратор, послідовно з'єднані другий компаратор та другий одновібратор, дисплей, мікроконтролер з вбудованими аналогоцифровим перетворювачем, оперативною пам'яттю, двома аналоговими входами, що почергово під'єднуються до входу аналого-цифрового перетворювача програмним шляхом та двома цифровими входами, що програмуються на ввід інформації, та почергово програмним шляхом опитуються мікроконтролером, причому перший вихід схеми вирівнювання амплітуд під'єднаний до входу першого диференціатора та до першого аналогового входу мікроконтролера, вхід дисплея під'єднано до виходу мікроконтролера, який відрізняється тим, що додатково містить генератор комутаційної напруги, послідовно з'єднані комутатор, що має два входи, один вихід та один керуючий вхід, селективний підсилювач, синхронний детектор, вихід якого під'єднано до входу підсилювача, вихід якого, в свою чергу, під'єднано до другого аналогового входу мікроконтролера та входу другого диференціатора, причому до першого входу комутатора під'єднано перший вихід схеми вирівнювання амплітуд, до другого входу комутатора під'єднано другий вихід схеми вирівнювання амплітуд, вихід другого диференціатора під'єднано до входу другого компаратора, вихід генератора комутаційної напруги під'єднано до керуючого входу комутатора, вихід першого одновібратора під'єднано до першого цифрового входу мікроконтролера, вихід другого одновібратора під'єднано до другого цифрового входу мікроконтролера, а покази дисплея є показами пристрою вимірювання фазового зсуву між вхідними гармонічними сигналами. 4 UA 118792 U 5 UA 118792 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 25/00, G01R 25/08
Мітки: пристрій, зсуву, фазового, вимірювання
Код посилання
<a href="https://ua.patents.su/8-118792-pristrijj-dlya-vimiryuvannya-fazovogo-zsuvu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання фазового зсуву</a>
Спосіб вимірювання фазового зсуву
Номер патенту: 104350
Опубліковано: 25.01.2016
Автори: Дронь Микола Іванович, Бучма Ігор Михайлович
МПК: G01R 25/00
Мітки: зсуву, вимірювання, фазового, спосіб
Формула / Реферат:
Спосіб вимірювання фазового зсуву, який полягає в тому, що вимірюють амплітудне значення одного з сигналів, який відрізняється тим, що вимірюють миттєве значення цього ж сигналу в момент , коли миттєве значення другого сигналу...
Спосіб вимірювання фазового зсуву
Номер патенту: 111339
Опубліковано: 10.11.2016
Автор: Бучма Ігор Михайлович
МПК: G01R 27/28, G01R 25/00
Мітки: зсуву, фазового, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання фазового зсуву між двома гармонічними сигналами та з нерівними амплітудами, за яким вимірюють амплітудне значення одного з сигналів, який відрізняється тим, що перед вимірюванням амплітудного значення
Спосіб вимірювання фазового зсуву
Номер патенту: 55496
Опубліковано: 10.12.2010
Автори: Лігоміна Сергій Миколайович, Кулікова Руслана Олександрівна
МПК: G01R 25/00
Мітки: спосіб, фазового, зсуву, вимірювання
Формула / Реферат:
Спосіб вимірювання фазового зсуву, що включає дискретизацію вимірюваного сигналу, перетворення його в цифрову форму з подальшою цифровою обробкою з метою знаходження синусної і косинусної опорних складових вимірюваного сигналу, за якими обчислюється фазовий зсув, який відрізняється тим, що до косинусної і синусної опорних складових вимірюваного сигналу додається певний фазовий зсув, який залежить від кількості вибірок на період сигналу, так...
Спосіб та пристрій для вимірювання фазового зсуву радіоімпульсних ехо-сигналів
Номер патенту: 98177
Опубліковано: 25.04.2012
Автори: Баженов Віктор Григорович, Мисливець Людмила Юріївна, Лігоміна Сергій Миколайович
МПК: G01R 25/00
Мітки: ехо-сигналів, радіоімпульсних, спосіб, пристрій, фазового, зсуву, вимірювання
Формула / Реферат:
1. Спосіб вимірювання фазового зсуву радіоімпульсних ехо-сигналів, що включає дискретизацію випромінюваного та відбитого сигналів, їх перетворення в цифровий код і ортогональне обчислення фазового зсуву, який відрізняється тим, що коди збережених значень синуса та косинуса опорного сигналу зчитують з частотою дискретизації, частоту, тривалість та період посилок випромінюваного радіосигналу задають також частотою дискретизації синхросигналів,...
Пристрій вимірювання фазового зсуву між двома сигналами за методом багатократної коінциденції
Номер патенту: 110822
Опубліковано: 25.10.2016
Автори: Гула Ігор Володимирович, Троцишин Іван Васильович, Горященко Костянтин Леонідович, Горященко Сергій Леонідович
МПК: H03D 3/02, G01R 25/00
Мітки: сигналами, двома, багатократної, зсуву, методом, пристрій, вимірювання, фазового, коінциденції
Формула / Реферат:
Пристрій вимірювання різниці фаз між двома сигналами, що складається з формувачів імпульсів, схем співпадінь, лічильників імпульсів, мікропроцесорного обчислювального блока, генератору опорних сигналів, який відрізняється тим, що в пристрій введено лічильники імпульсів співпадінь, а також детектор імпульсів, таким чином, що на вхід лічильника подаються сигнали від схеми співпадінь, на вхід лічильника подаються сигнали від схеми співпадінь,...
Попередній патент: Універсальний багатоканальний цифровий приймач
Наступний патент: Спосіб виготовлення структур імпульсного діода
Випадковий патент: Дисковий двигун постійного струму