Спосіб вимірювання відносного відхилення опору
Номер патенту: 29660
Опубліковано: 15.11.2000
Автори: Столярчук Петро Гаврилович, Бучма Орест Ігорович, Бучма Ігор Михайлович



Текст
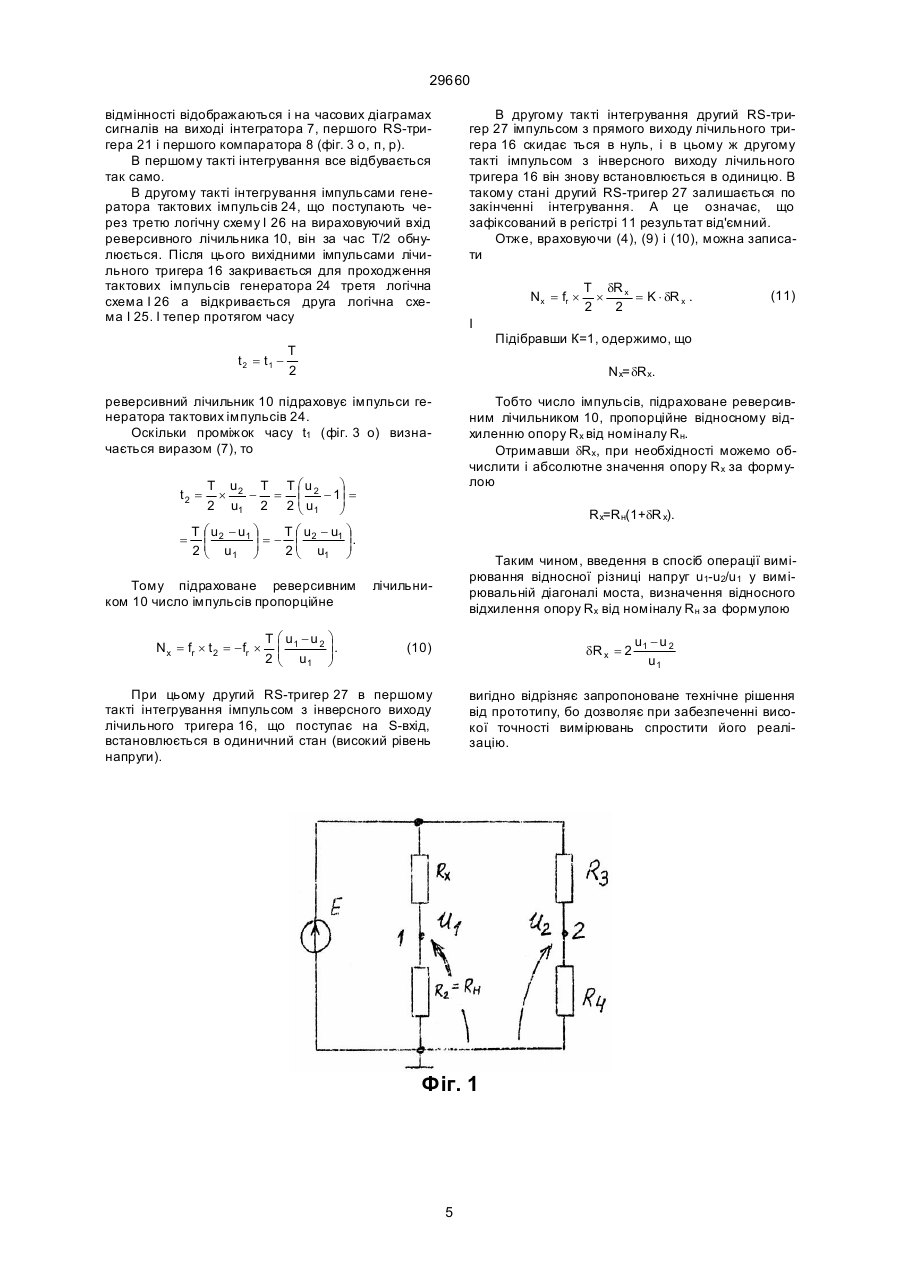
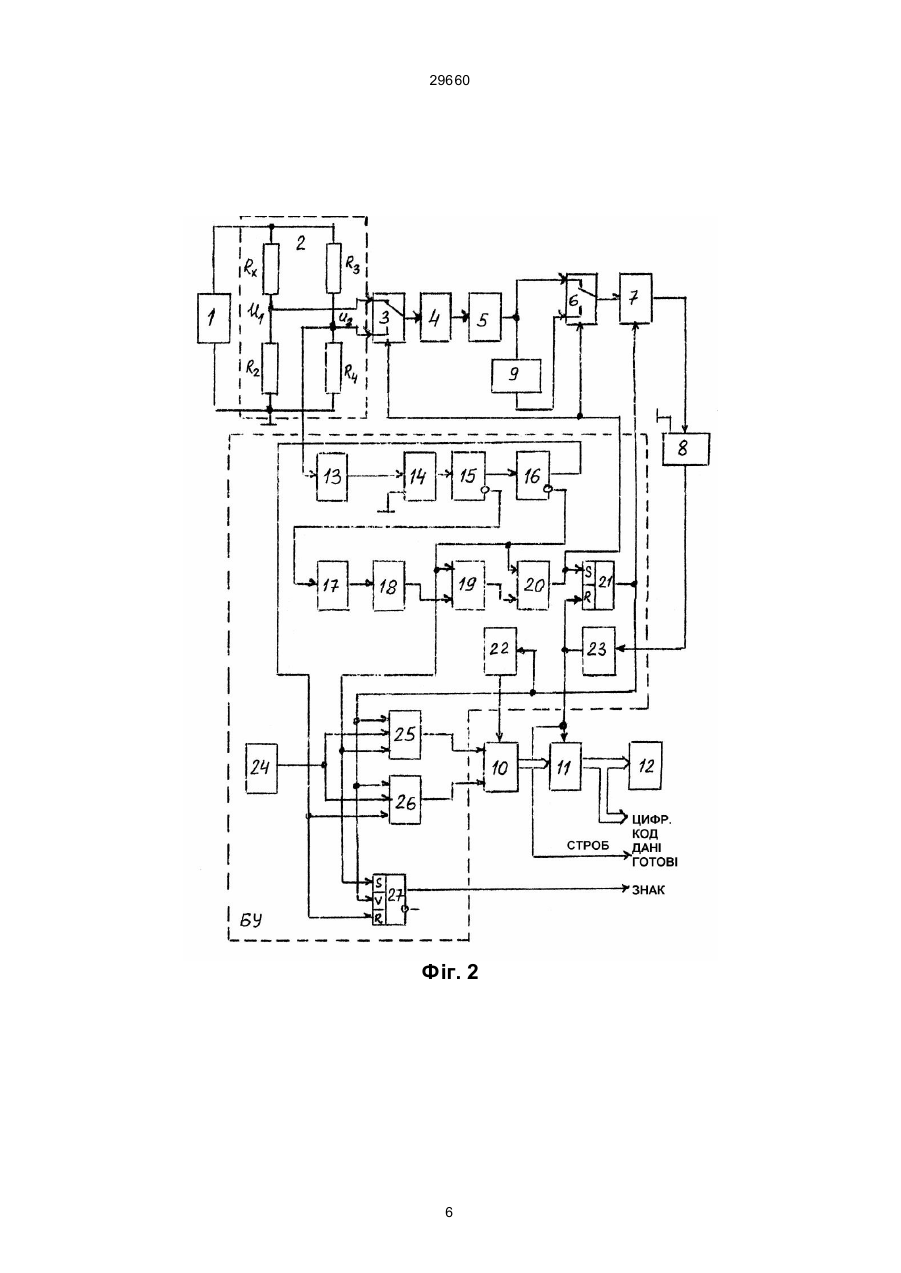
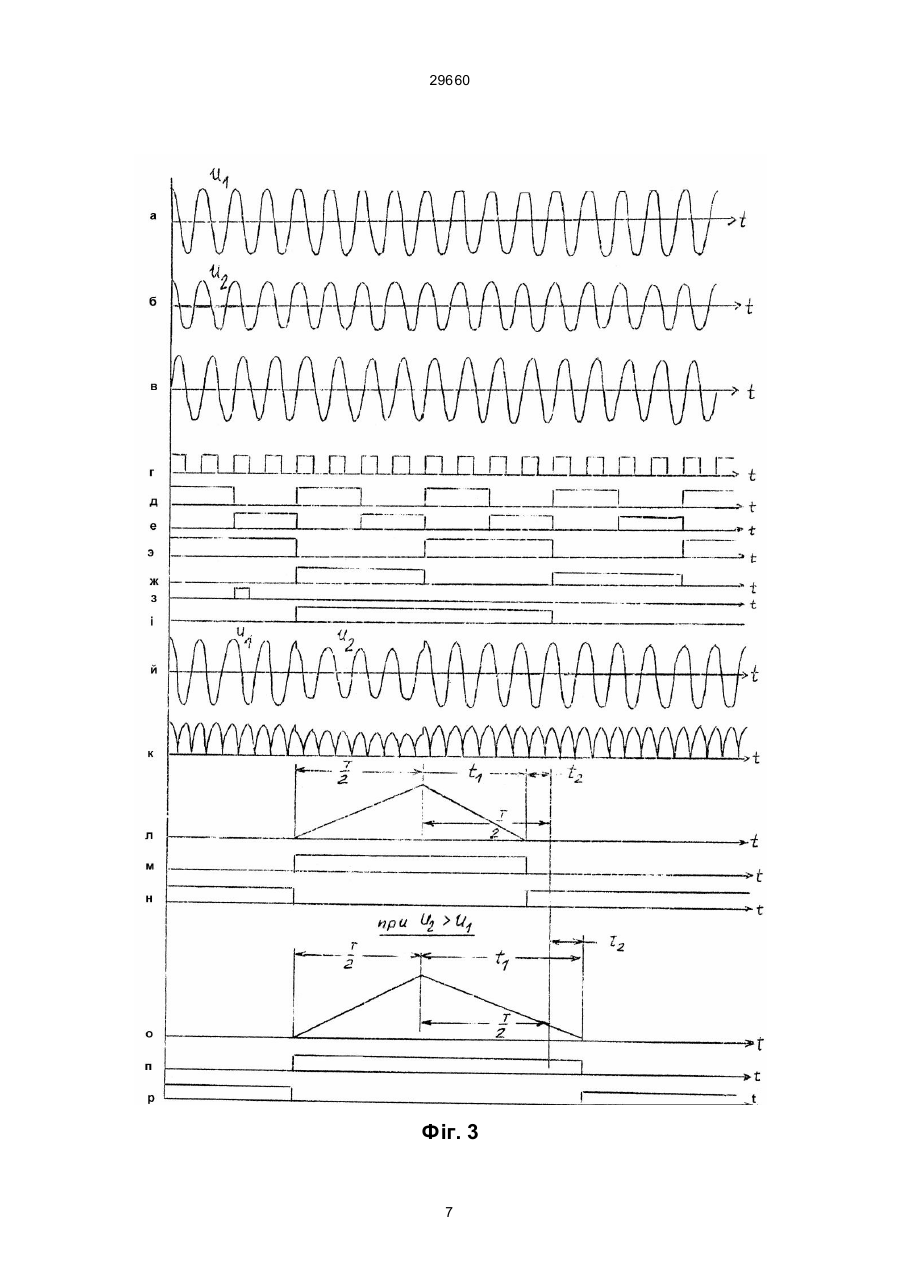
Спосіб вимірювання відносного відхилення опору, при якому елемент опору включають в плече чотирьохплечового незрівноваженого моста, (3) В (3) перший член, пропорційний вимірювальній величині, другий – це похибка з рахунок нестабільності е. р. с. джерела живлення, третій – це похибка не лінійності. 29660 Найбільш близьким до запропонованого рішення є спосіб вимірювання відносного відхилення опору Rx, при якому його включають в плече чотириплечового неврівноваженого моста. Однак спосіб є складним в реалізації, бо вимагає ще таких операцій як перетворення відношення опору Rx до зразкового опору R, включеного в ту ж вітку моста, що і опір Rx, у цифровий код Nr, тобто Nr=Rx/R, і після набуття вимірюваним опором значення Rx' за рахунок приросту DR x, подальшого перетворення його у ци фровий код згідно з формулою Nr' = u1-u2/u1 і визначають відносне відхилення опору Rx від номіналу Rн, що задається опором резистора, включеного в ту ж вітку моста, що і опір Rx, за формулою dR x = 2 Отже, нехай вимірюється відносна різниця напруг u1-u2/u 1 у вимірювальній діагоналі моста (фіг. 1). У відповідності до виразу (1) на фіг. 1 цю різницю напруг можна представити так R'x (R + D Rx ) × R DR x = x = 1+ = 1 + dR x R × Nr R ×Rx Rx u1 - u2 E (1+ dE) (R 4R x - R 2 R3 ) (R x + R 2 ) = = u1 (R3 + R 4 ) (Rx + R2 )E (1+ dE )R 2 R R - R 2R 3 = 4 x . R 2 (R 3 + R 4 ) та одержання вихідного коду Nвих=DRx/Rx або інвертуючи код Nr' при від'ємних DRx, тобто коли Nr'>1 (а. с. СРСР № 983551 за кл. B01R17/10). Тут основні труднощі пов'язані з виконанням операції одержання коду Nr', що вимагає наявності складного дільника(помножувача) частоти, щоб реалізувати ділення на код Nr, який може бути будь-яким дробовим числом, більшим або меншим одиниці. В основу винаходу поставлене завдання створити спосіб вимірювання відносного відхилення опору Rx, в якому введення додаткових операцій дозволило б забезпечити високу точність та простоту реалізації. Поставлене завдання вирішується тим, що в спосіб вимірювання відносного відхилення опору Rx, при якому його встановлюють в плече чотириплечового неврівноваженого моста, згідно з винаходом вимірюють відносну різницю напруг у вимірювальній діагоналі моста u1-u2/u1 та визначають відносне відхилення опору Rx від номіналу Rн за формулою dR x = 2 Якщо R2=Rн, а R3=R4=R, то u1 - u2 R (R x - Rн ) R x - Rн = = = u1 2R × R н 2Rн 1 DR x 1 = ´ = ´ dR x , 2 Rн 2 (4) де dR x – відносне відхилення опору Rx від номіналу Rн . Звідси dR x = 2 u1 - u2 . u1 Таким чином, вимірюючи відносну різницю напруг у вимірювальній діагоналі чотириплечового моста можемо визначити відносне відхилення опору Rx від номіналу Rн. При цьому зберігається висока точність, бо виключаються похибка не лінійності моста та похибка від нестабільності джерела живлення моста, і забезпечується простота реалізації. Спосіб реалізується пристроєм, який складається (фіг. 1) з генератора змінної напруги 1, що підключений до діагоналі живлення неврівноваженого моста 2, складеного з резисторів Rx, R2, R3, R4, причому дві вітки моста 2, утворені, відповідно, резисторами Rx і R2 та R3 і R4, включені паралельно, утворюючи діагональ живлення, а точка з'єднання резисторів R2, R4 та генератора 1 – заземлена, послідовно з'єднаних першого комутатора 3, сигнальні входи якого підключені до вимірювальної діагоналі моста 2, утвореної точками з'єднання, відповідно, резисторів Rx і R2 та R3 і R4, підсилювача 4, амплітудного детектора 5, другого комутатора 6, інтегратора 7 і компаратора 8, другий вхід якого заземлений, аналогового інвертора 9, вхід якого підключений до виходу амплітудного де тектора 5, а вихід – до др угого входу др угого комутатора 6, послідовно з'єднаних реверсивного лічильника 10, регістра 11, вихід якого є цифровим виходом результату вимірювання – ВИХ. КОД, та індикатора 12, блока керування, який складається з послідовно з'єднаних квадратурного фазооберта u1 - u2 . u1 Введення операції вимірювання відносної різниці напруг у вимірювальній діагоналі чотириплечового моста забезпечує лінійність його характеристики, тобто високу точність, а простота реалізації операції вимірювання відносної різниці напруг забезпечує простоту те хнічних засобів, що реалізують запропонований спосіб. Введення операції визначення відносного відхилення опору Rx за формулою dR x = 2 u1 - u2 . u1 u1 - u2 u1 забезпечує простоту реалізації способу в цілому. На фіг. 1 зображено чотири плечовий вимірювальний міст, на фіг. 2 – структурна схема пристрою для вимірювання відносного відхилення опору запропонованим способом, в на фіг. 3 – часові діаграми роботи пристрою. Для вимірювання відносного відхилення опору Rx його встановлюють в плече чотириплечового неврівноваженого моста, вимірюють відносну різницю напруг у вимірювальній діагоналі моста 2 29660 ча 13, вхід якого підключений до точки з'єднання резисторів R3 і R4моста 2, другого компаратора 14, другий вхід якого заземлений, дільника частоти 15 та лічильного тригера 16, послідовно з'єднаних дільника частоти 17, вхід якого підключений до інверсного виходу дільника частоти 15, першого одновібратора 18, схеми виділення періоду 19 та першої логічної схеми І 20, вихід якої підключений до керуючих входів першого 3 та другого 6 комутаторів та до S-входу першого RS-тригера 21, вихід якого підключений до керуючого входу інтегратора 7, причому другі входи схеми виділення періоду 19 та першої логічної схеми І 20 підключені до інверсного виходу лічильного тригера 16, другого одно вібратора 22, вихід якого підключений до виходу першого RS-тригера 21, а вихід – до R-входу реверсивного лічильника 10, третього одновібратора 23, вхід якого підключений до виходу першого компаратора 8, а вихід – до R-входу першого RSтригера 21, до стробуючого входу регістра 11 і до виходу пристрою "ДАНІ ГОТОВІ", генератора тактових імпульсів 24, другої та третьої логічних схем І 25 і 26, перші входи яких підключені до виходу першого RS-тригера 21, другі входи – до виходу генератора тактових імпульсів 24, третій вхід другої логічної схеми І 25 підключений до інверсного виходу лічильного тригера 16, третій вхід третьої логічної схеми І 26 підключений до прямого виходу лічильного тригера 16, вихід другої логічної схеми І 25 підключений до входу сумування реверсивного лічильника 10, другого RS-тригера 27, у якому R-вхід підключений до прямого виходу лічильного тригера 16, S-вхід – до інверсного виходу лічильного тригера 16, V-вхід – до виходу першого RS-тригера 21, а вихід – до виходу пристрою "ЗНАК". Пристрій працює таким чином. Напруги вершин вимірювальної діагоналі моста 2 (фіг. 3 а, б) подаються на відповідні входи першого комутатора 3. Одночасно напруга з точки з'єднання резисторів R3 та R4 подається на вхід квадратурного фазообертача 13 і зсувається ним по фазі на p/2. Після перетворення її першим компаратором 14 в напругу прямокутної форми (фіг. 3 г) фронти цієї напруги співпадають з моментами, що відповідають максимумам напруг у точках вимірювальної діагоналі моста 2 (фіг. 3 а, б, г). Вихідна напруга першого компаратора 14 поступає на дільник частоти 15 (фіг. 3 д, е) і з його виходу подається на вхід лічильного тригера 16, на виході якого формується послідовність імпульсів із шпаруватістю 2 (фіг. 3 є, ж). Комутатори 3 та 6 знаходяться в нормальному стані, коли на їх керуючі входи з виходу логічної схеми І 20 подається сигнал низького рівня. Тоді виходи комутаторів підключаються до своїх перших (верхніх на фіг. 2) виходів. В цьому випадку напруга u1 однієї з точок вимірювальної діагоналі моста 2 подається на підсилювач 4, детектується амплітудним детектором 5 і через другий комутатор 6 поступає на вхід інтегратора 7. Якщо ж рівень керуючої напруги на виході першої логічної схеми І 20 високий, то виходи першого 3 і другого 6 комутаторів підключаються до своїх других (нижніх на фіг. 2) входів. Тоді напруга u2 з іншої точки вимірювальної діагоналі моста 2 подається на вихід комутатора 3. Далі, пройшовши через під силювач 4, амплітудний детектор 5, інвертор 9 і другий комутатор 6, поступає на вхід інтегратора 7. Сигнал на виході комутатора 3 має вигляд, зображений на фіг. 3 й, а після амплітудного детектування детектором 5 сигнал приймає вигляд, що зображений на фіг. 3 к. Вигляд сигналу на ви ході аналогового інвертора 9 на фіг. 3 не показаний, оскільки він має вигляд того, що зображений на фіг. 3 к, але відрізняється від нього полярністю. Отже, процес вимірювання залежить від першого RS-тригера 21, що спочатку знаходиться в нульовому стані (фіг. 3 м) і по керуючому входу інтегратора 7 блокує його роботу. З приходом переднього фронту ви хідного імпульсу др угого дільника частоти 17, вхід якого підключений до інверсного виходу першого дільника частоти 15 (фіг. 3 е), перший одновібратор 18 формує одиночний імпульс (фіг. 3 з), за яким схема виділення періоду 19 виділяє імпульс тривалістю Т (фіг. 3 і), де Т - період послідовності вихідних імпульсів лічильного тригера 16. По вихідному імпульсу схеми виділення періоду 19 перша логічна схема І 20 виділяє один імпульс з імпульсної послідовності, що діє на інверсному виході лічильного тригера 16 (фіг. 3 ж) тривалістьТ/2, який поступає на S-вхід першого RSтригера 21, встановлюючи на виході RS-тригера 21 високий рівень напруги (фіг. 3 л), та на керуючі входи комутаторів 3 і 6, підключаючи їх виходи до др уги х (нижніх на фіг. 2) входів. Напруга високого рівня з виходу першого RS-тригера 21 поступає на керуючий вхід інтегратора 7 і дозволяє його роботу. Так розпочинається перший такт інтегрування протягом часу Т/2. В цьому такті вхід інтегратора 7 через другий комутатор 6 підключений до виходу аналогового інвертора 9, на якому діє продетектована і проінвертована (а тому від'ємна) напруга, постійна складова якої пропорційна ku2, k – коефіцієнт перетворення напруги u2 підсилювачем 4 та амплітудним детектором 5. Враховуючи те, що інтегратор 7, якщо його виконати на операційному підсилювачі, є інвертуючим, вихідна напруга інвертора 7 буде додатною (фіг. 3 к) і протягом часу Т/2, що визначає тривалість першого такту інтегрування, буде описуватися виразом u 7 (t ) = 1 t ku 2 ò ku2 dt = t RC 0 t ò dt = 0 ku t ku = 2 | = 2 t, t 0 t ku 2 t t òt = 0 (1) де: t=RC – стала інтегрування; R, C – відповідно, опір та ємність інтегратора. u 7 (T / 2 ) = ku 2 T . 2t (2) Одночасно з початком інтегрування другий одновібратор 22 формує короткий імпульс, що встановлює реверсивний лічильник 10 в нульовий стан, а на перший і третій входи другої логічної схеми І 25 подаються додатні імпульси, відповідно, 3 29660 з виходу першого RS-тригера 21 і інверсного виходу лічильного тригера 16, чим дозволяється проходження імпульсів від генератора тактових імпульсів 24 та сумуючий вхід реверсивного лічильника 10. Підраховування імпульсів реверсивним лічильником 10 здійснюється протягом часу Т/2, тобто першого такту інтегрування. За цей час на сумуючий вхід реверсивного лічильника поступить N1 = T T = × fr 2Tr 2 ході інтегратора 7 (фіг. 3 л), тобто 1 t ku dt . RC ò 1 0 ku 2 T ku 1 ´ t. t 2 t u2 T = u1 ´ t1 . 2 (3) Звідси t1 = T æT ö ´ fr - t1 fr = fr ç - t1 ÷ = fr t 2 , 2 è2 ø T u2 ´ . 2 u1 (7) Підставивши (7) в(6), одержимо t2 = T æ u2 ö T æ u1 - u2 ö ç1÷= ç ÷. 2ç u1 ÷ 2 ç u1 ÷ è ø è ø (8) З (6), вра ховуючи (8), знаходимо Nx = fr ´ (4) T æ u1 - u2 ö ç ÷. 2 ç u1 ÷ è ø (9) Тобто число імпульсів, підраховане реверсивним лічильником 10, пропорційне відносній різниці напруг в точках вимірювальної діагоналі моста 2. Якщо u1>u2, то t1
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of respective deflection of resistance
Автори англійськоюBuchma Ihor Mykhailovych, Buchma Orest Ihorovych, Stoliarchuk Petro Havrylovych
Назва патенту російськоюСпособ измерения относительного отклонения сопротивления
Автори російськоюБучма Игорь Михайлович, Бучма Орест Игоревич, Столярчук Петр Гаврилович
МПК / Мітки
МПК: G01R 17/00
Мітки: відносного, опору, відхілення, спосіб, вимірювання
Код посилання
<a href="https://ua.patents.su/8-29660-sposib-vimiryuvannya-vidnosnogo-vidkhilennya-oporu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання відносного відхилення опору</a>
Датчик для вимірювання опору грунту різанню під водою
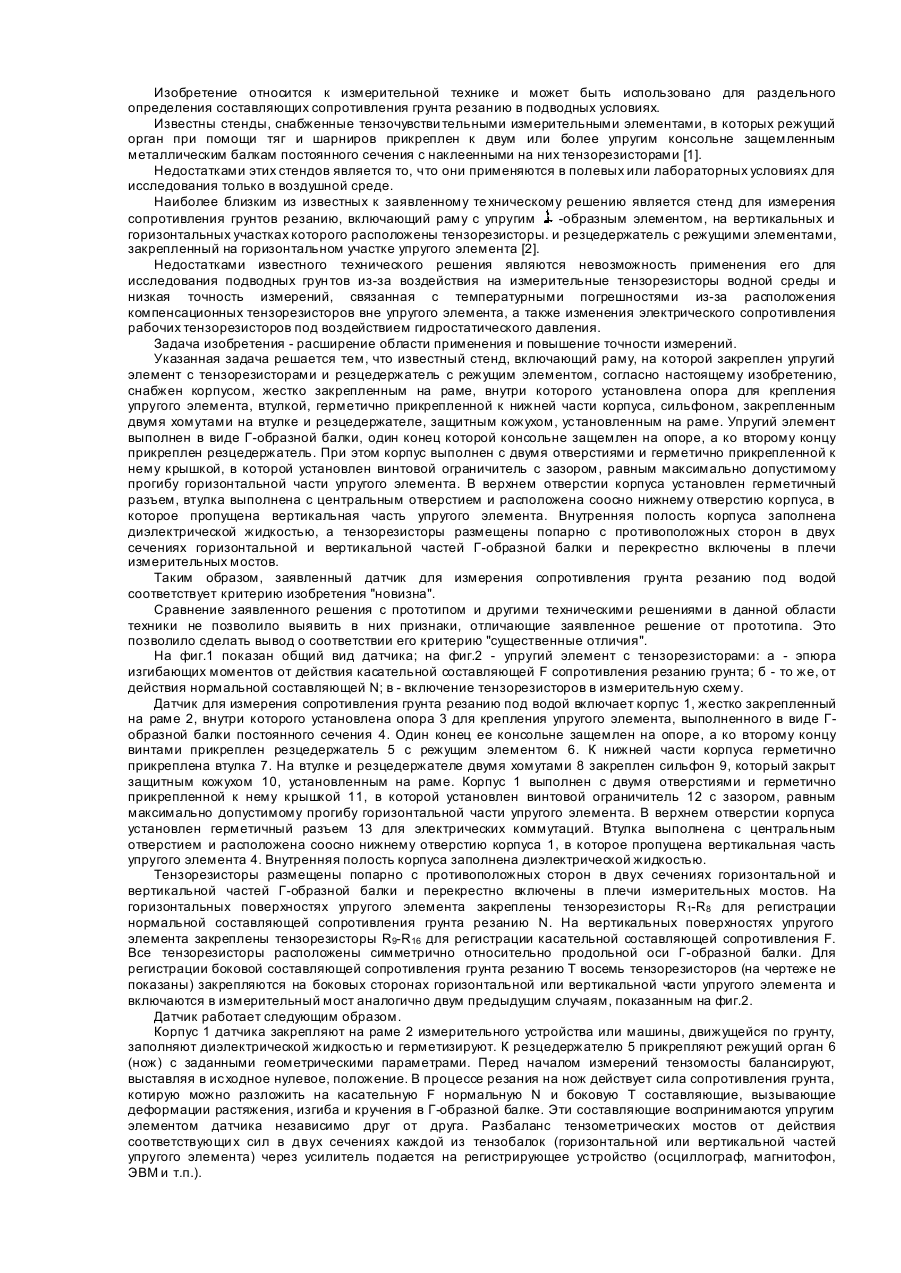
Номер патенту: 20687
Опубліковано: 02.09.1997
Автори: Сукач Олексій Михайлович, Сукач Сергій Михайлович, Сукач Михайло Кузьмич
Мітки: водою, різанню, опору, грунту, датчик, вимірювання
Формула / Реферат:
Пристрій для вимірювання параметрів комплексного опору
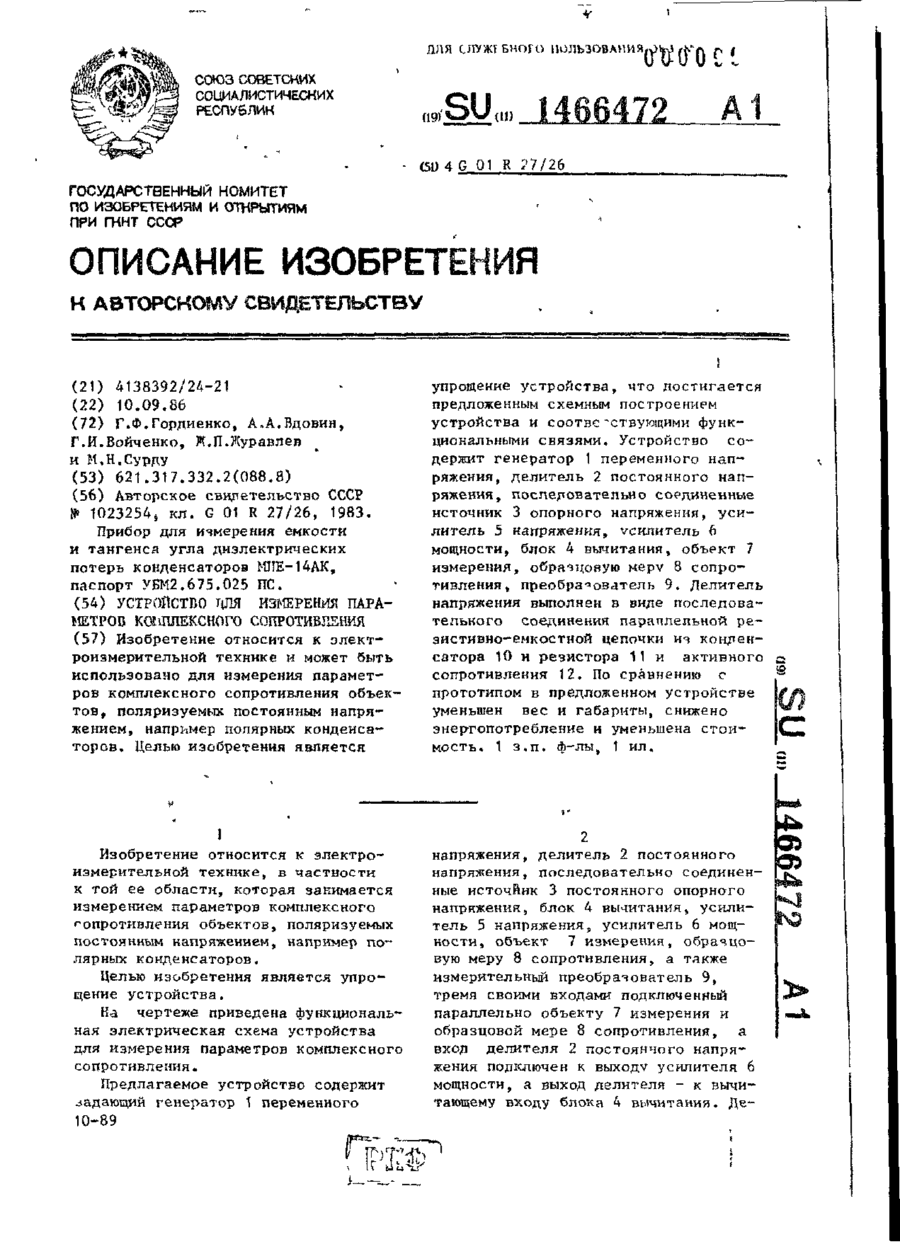
Номер патенту: 14394
Опубліковано: 25.04.1997
Автори: Журавльов Жорж Павлович, Сурду Михайло Миколайович, Войченко Генадій Іванович, Вдовін Олександр Анатолійович, Гордіенко Григорій Федорович
МПК: G01R 27/26
Мітки: комплексного, вимірювання, опору, параметрів, пристрій
Формула / Реферат:
1. Устройство для измерения параметров комплексного сопротивления, содержащее задающий генератор переменного напряжения, последовательно соединенные источник постоянного опорного напряжения, блок вычитания, усилитель напряжения, усилитель мощности, выход которого соединен с первым зажимом измерительного преобразователя для подключения объекта измерения и входом делителя постоянного напряжения, выход которого подключен к вычитающему входу...
Пристрій для вимірювання електричного опору біологічної рідини
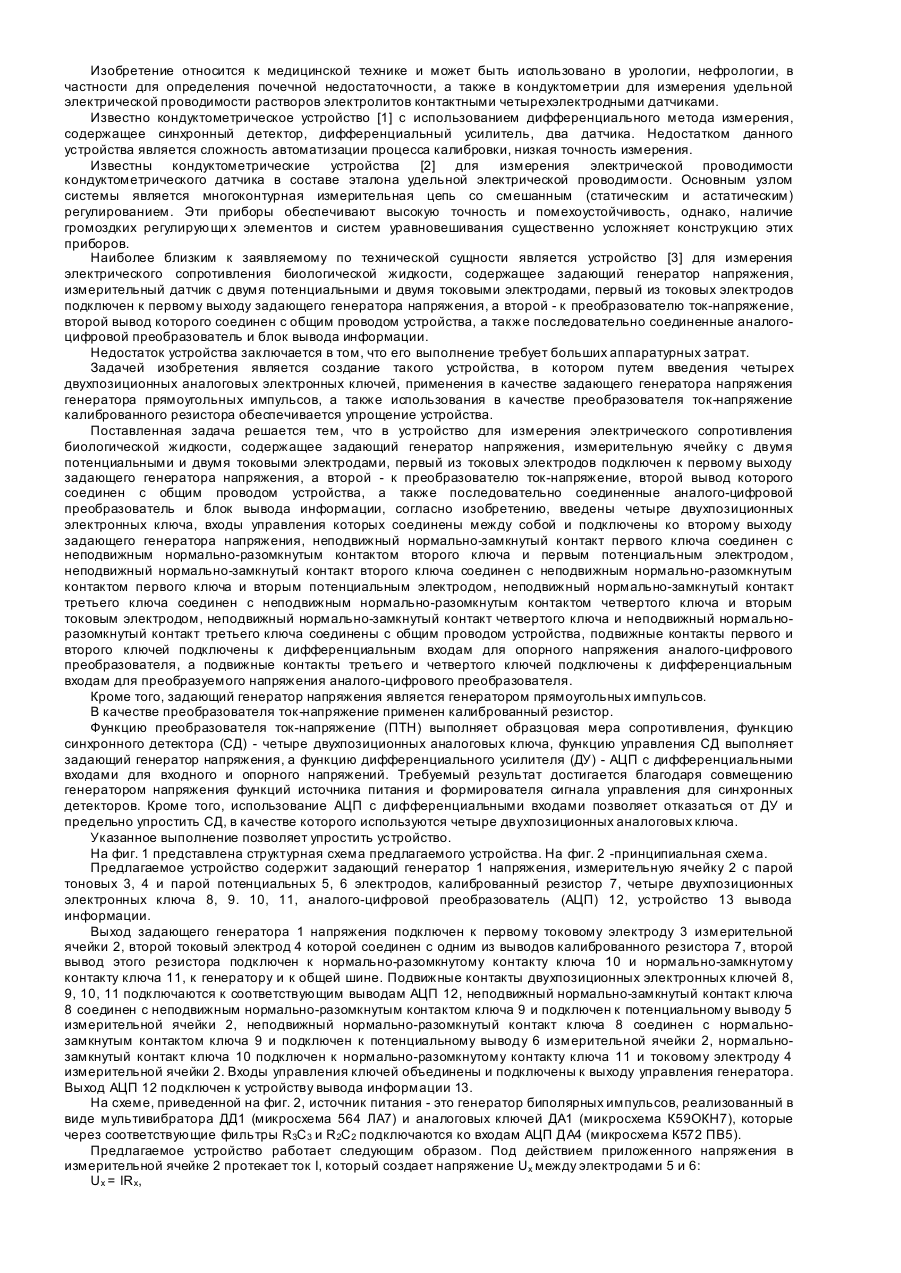
Номер патенту: 4060
Опубліковано: 27.12.1994
Автори: Ізволенська Ніна Євгенівна, Сурду Михайло Миколайович, Міхаль Олександр Олексійович
МПК: A61B 5/053
Мітки: рідини, вимірювання, біологічно, електричного, опору, пристрій
Формула / Реферат:
Устройство для измерения электрического сопротивления биологической жидкости, содержащее задающий генератор напряжения, измерительную ячейку с двумя потенциальными и двумя токовыми электродами, первый из токовых электродов подключен к первому выходу задающего генератора напряжения, а второй - к преобразователю ток-напряжение, второй вывод которого соединен с общим проводом устройства, а также последовательно соединенные аналого-цифровой...
Спосіб визначення відносного змінення об’єму поперечних магнітних доменів у звитих магнітопроводах
Номер патенту: 16241
Опубліковано: 29.08.1997
Автор: Жметко Дмитро Миколайович
МПК: G01R 33/12
Мітки: поперечних, доменів, змінення, відносного, магнітних, спосіб, об'єму, звитих, визначення, магнітопроводах
Формула / Реферат:
Способ определения относительного изменения объема поперечных магнитных доменов в витых магнитопроводах, включающий воздействие на испытуемый магнитопровод постоянным магнитным полем и измерение электрического сопротивления и его приращения для испытуемого магнитопровода, отличающийся тем, что, с целью повышения точности, до воздействия на испытуемый магнитопровод постоянным магнитным полем пропускают постоянный электрический ток через...
Перетворювач комплексних опору і провідності в напругу
Номер патенту: 18438
Опубліковано: 25.12.1997
Автор: Хома Володимир Васильевич
МПК: G01R 27/26
Мітки: перетворювач, напругу, провідності, комплексних, опору
Формула / Реферат:
Преобразователь комплексных сопротивления и проводимости в напряжение, содержащий два входных зажима для подключения измеряемого объекта, образцовый резистор, генератор синусоидального напряжения, повторитель напряжения и два переключателя, общий контакт первого переключателя соединен с первым входным зажимом преобразователя, а второй входной зажим одновременно соединен со входом повторителя напряжения и с первым выводом образцового...
Попередній патент: Спосіб діагностики запальних процесів після екстракції катаракти з імплантацією штучного кришталика
Наступний патент: Спосіб одержання нафтополімерної смоли
Випадковий патент: Магнітна система барабанного сепаратора