Система контролю та реєстрації параметрів силової установки літального апарата

Формула / Реферат
Система контролю та реєстрації параметрів силової установки літального апарата, яка містить блок обчислювача, послідовно з’єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач, перший операційний блок виходами з’єднаний з блоком обчислювача та комутатором, яка відрізняється тим, що в систему додатково введені два блоки формувачів, два перетворювачі частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного управління, два блоки реєстрації параметрів, другий блок нормалізаторів, другий аналого-цифровий перетворювач, два блоки контролю датчиків та другий операційний блок, входи першого операційного блока з’єднані з виходами блока обчислювача, першого аналого-цифрового перетворювача, першого шинного формувача та першого перетворювача частота-код, а виходи першого операційного блока з’єднані з першим шинним формувачем, першим перетворювачем частота-код та першим комутатором, а останній вхід-вихід першого операційного блока з’єднаний з входом-виходом першого блока реєстрації параметрів, другий операційний блок виходами з’єднаний з блоком обчислювача, другим перетворювачем частота-код, другим шинним формувачем, другим комутатором та другим аналого-цифровим перетворювачем, а його входи з’єднані з виходами блока обчислювача, другого перетворювача частота-код, другого шинного формувача та другого аналого-цифрового перетворювача, а останній вхід-вихід другого операційного блока з’єднаний з входом-виходом другого блока реєстрації параметрів, вхід першого блока формувачів з’єднаний із входом першого блока контролю датчиків та першим входом системи, а другий вхід системи з’єднаний із входом першого блока нормалізаторів, другий вихід якого, через блок контролю датчиків, з’єднаний з першим шинним формувачем та першим блоком автоматичного управління, вхід якого з’єднаний з третім виходом першого блока нормалізаторів, вихід першого блока формувачів безпосередньо з’єднаний з першим перетворювачем частота-код, а через перший блок автоматичного управління з’єднаний з першим шинним формувачем, вхід другого блока формувачів з’єднаний із входом другого блока контролю датчиків та третім входом системи, четвертий вхід системи з’єднаний із входом другого блока нормалізаторів, а виходи другого блока формувачів, другого блока нормалізаторів, другого блока контролю датчиків через другий блок автоматичного управління з'єднані з другим шинним формувачем, окрім того вихід другого блока формувачів з’єднаний з другим перетворювачем частота-код, другий вихід другого блока нормалізаторів через другий блок контролю датчиків з’єднаний з другим шинним формувачем, третій вихід другого блока нормалізаторів через другий комутатор з’єднаний з другим аналого-цифровим перетворювачем, вхід, що залишився, блока обчислювача є п’ятим входом системи, а вихід, що залишився, блока обчислювача є першим виходом системи, другий та третій входи системи є виходами першого та другого блоків автоматичного управління відповідно.
Текст
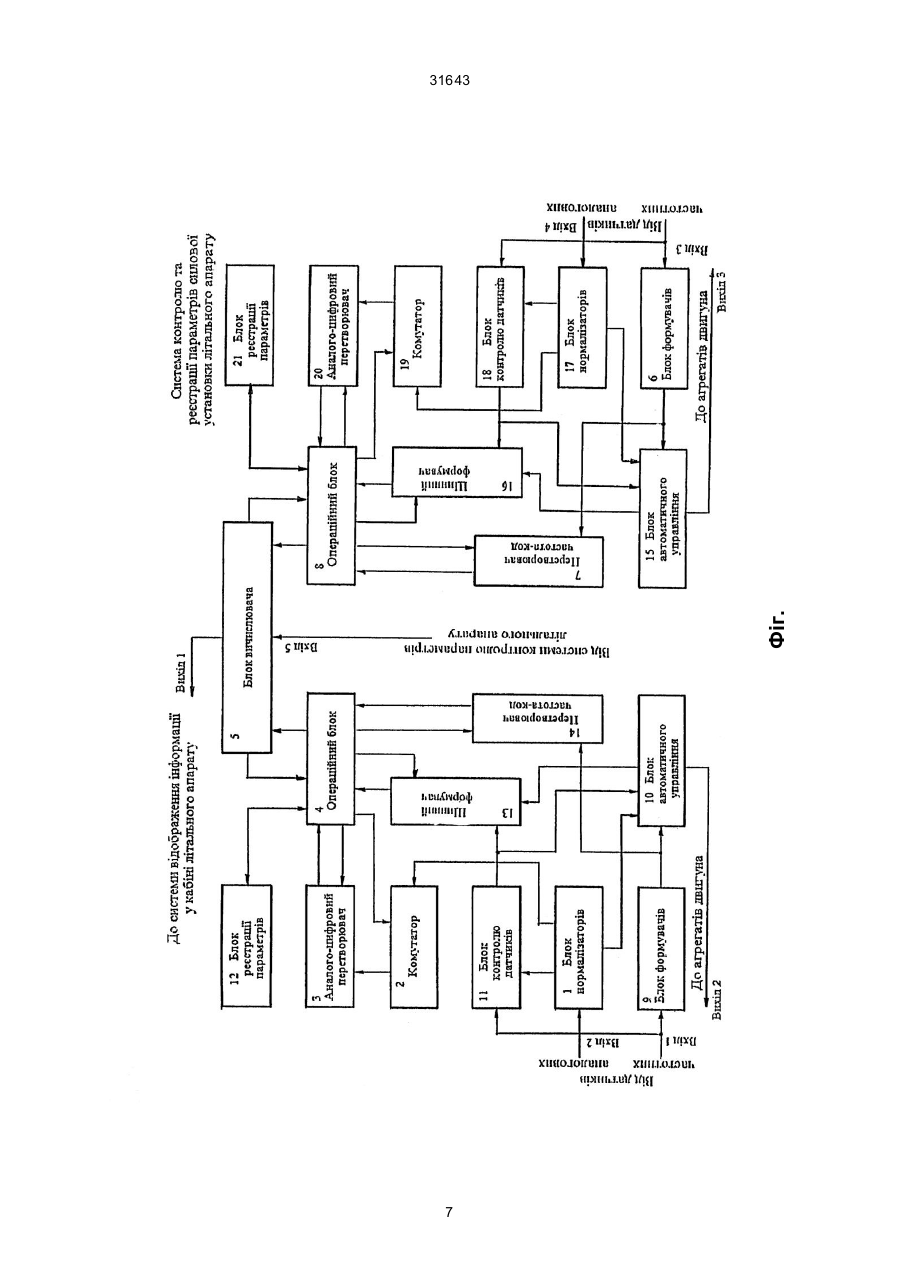
Система контролю та реєстрації параметрів силової установки літального апарата, яка містить блок вичислювача, блок формувачів, послідовно з'єднані блок нормалізаторів, комутатор та аналого-цифровий перетворювач, перший операційний блок виходами з'єднаний із блоком вичислювача та комутатором, а його вхід з'єднаний із виходом блока вичислювача, другий операційний блок виходами з'єднаний із блоком обчислювача та перетворювачем частота-код, а вхід операційного блока з'єднаний із виходом блока обчислювача, яка відрізняє ться тим, що в систему додатково введені другий перетворювач частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного управління, два блоки реєстрації параметрів, другий блок нормалізаторів, другий аналого-цифровий перетворювач, два блоки контролю датчиків та другий блок формувачів, вхід якого з'єднаній із входом першого блока контролю датчиків та першим входом системи, а другий вхід системи з'єднаний із входом наявного блока нормалізаторів, другий ви хід якого з'єднаний із другим входом першого блока контролю датчиків, виходи наявного блока нормалізаторів, другого блока формувачів та першого блока контролю датчиків через перший блок автоматичного управління та шинний формувач з'єднані із першим операційним блоком, а другий вхід першого шинного формувача з'єднаний із виходом першого блока контролю A (54) СИСТЕМА КОНТРОЛЮ ТА РЕЄСТРАЦІЇ ПАРАМЕТРІВ СИЛОВОЇ УСТАНОВКИ ЛІТАЛЬНОГО АПАРАТА 31643 - система повинна забезпечувати достатню функціональну надійність експлуатації авіаційних двигунів. Відомі системи: "Пристрій для допускового контролю", який має блок нормалізації, комутатор, аналого-цифровий перетворювач, детектор мінімального коду датчика, програмний блок, детектор максимального коду датчика, блок пам'яті та обчислювач (а. с. СРСР № 780679, кл. G06F13/46,G05В23/02); "Система управління газотурбінним двигуном", яка має датчики, блок автоматичного управління та контролю, схему І, програмний блок, реєстратор, схему ІЛІ, переключаючі та виконавчі елементи, блок стимулюючих сигналів, запам'ятовуючий блок та блок формування сигналів відмови (а. с. СРСР № 726360, кл. F02C9/02); "Система контролю газотурбінного двигуна", яка має блок управління, комутатор вхідних сигналів, два аналого-цифрових перетворювачі, обчислювальний блок, блок пам'я ті, блок опорних напруг та комутатор опорних напруг (а. с. СРСР № 780696, кл. G06F15/46). Вищезазначені системи мають обмежені функціональні можливості та недостатню функціональну надійність. Найближчою за технічною сутністю та досягнутому ефекту по відношенню до запропонованого технічного рішення є відома "Система автоматичного контролю параметрів газотурбінного двигуна" (див.: а. с. СРСР № 786434, кл. F02С9/28, G06F15/46), яка має обчислювач (блок обчислювача), послідовно з'єднані блок нормалізації, комутатор, аналого-цифровий перетворювач, перший програмний (операційний) блок виходами з'єднаний з обчислювачем та комутатором, а його вхід з'єднаний з виходом обчислювача, другий програмний (операційний) блок виходами з'єднаний з обчислювачем та перетворювачем інтервал (частота)-код, а його вхід з'єднаний з виходом обчислювача та блок формувачів. Вказана система має такі недоліки: - відсутній безперервний запис параметрів, які характеризують стан газотурбінного двигуна за усіма режимами його роботи, що обмежує область застосування та виключає експлуатацію двигуна за те хнічним станом; - відсутні контроль та реєстрація сигналів порушення ланцюгів датчиків газотурбінного двигуна, що шкодить його експлуатації та виключає визначення відмов у ланцюгах датчиків на етапі дешифр ування польотних даних, що збільшує час пошуку відмов у ланцюгах датчиків за допомогою сервісної апаратури; - відсутнє незалежне автоматичне управління агрегатами двигуна, що обмежує область застосування системи; - низька функціональна надійність системи стосовно силової установки літального апарата, яка має два або більше газотурбінних двигунів, що також обмежує область застосування системи. Цей винахід направлено на створення системи контролю та реєстрації параметрів силової установки літального апарата, шляхом: - безперервного запису параметрів силової установки літального апарату, що дозволить визначити фізичні значення параметрів та їх зміни у залежності від режиму її роботи для забезпечення надійної експлуатації газотурбінної (силової) установки за технічним станом, що дозволить, в свою чергу, визначити, за яким конкретно параметром кожний газотурбінний двигун силової установки вийшов на аварійний режим роботи; - безперервної реєстрації сигналів порушення ланцюгів датчиків кожного газотурбінного двигуна силової установки, що дозволить на етапі дешифр ування польотних даних, зареєстрованих системою, визначити, в якому конкретно датчику сталося порушення ланцюга; - незалежного автоматичного управління агрегатами кожного двигуна силової установки, що дозволить забезпечити функціональну надійність експлуатації силової установки; - забезпечення достатньої функціональної надійності системи стосовно силової установки літального апарата, яка має два або більше газотурбінних двигунів, що дозволить збільшити надійність роботи силової установки. Метою запропонованого винаходу є поширення функціональних можливостей, області застосування та підвищення функціональної надійності експлуатації силової установки літального апарата. Зазначена мета досягається тим, що у відому систему, яка має блок обчислювача, блок формувачів, послідовно з'єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач, перший операційний блок виходами з'єднаний з блоком обчислювача та комутатором, а його вхід з'єднаний з виходом блока обчислювача, другий операційний блок виходами з'єднаний з блоком обчислювача та перетворювачем частота-код, а його вхід з'єднаний з виходом блока обчислювача, додатково введені другий перетворювач частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного управління, два блоки реєстрації параметрів, другий блок нормалізаторів, другий аналого-цифровий перетворювач, два блоки контролю датчиків та другий блок формувачів, вхід якого з'єднаний із входом першого блока контролю датчиків та першим входом системи, а другий вхід системи з'єднаний із входом існуючого блока нормалізаторів, другий ви хід якого з'єднаний із другим входом першого блока контролю датчиків, виходи існуючого блоку нормалізаторів, другого блока формувачів та першого блока контролю датчиків через перший блок автоматичного управління та шинний формувач з'єднані з першим операційним блоком, а другий вхід першого шинного формувача з'єднаний з виходом першого блока контролю датчиків, вихід др угого блока формувачів через другий перетворювач частота-код з'єднаний з першим операційним блоком, операційний блок та блок реєстрації параметрів входамивиходами з'єднані між собою, окрім того операційний блок виходами, що залишились, з'єднаний із входами, що залишились, шинного формувача, перетворювача частота-код та аналого-цифрового перетворювача, вихід якого з'єднаний з першим операційним блоком, вхід існ уючого блока формувачів з'єднаний з третім входом системи та входом другого блока контролю датчиків, четвертий вхід системи з'єднаний із входом другого блока норма 2 31643 лізаторів, а ви ходи існуючого блока формувачів, другого блока нормалізаторів, другого блока контролю датчиків через другий блок автоматичного управління та другий шинний формувач з'єднані із другим операційним блоком, окрім того, вихід існуючого блока формувачів через існуючий перетворювач частота-код з'єднаний із другим операційним блоком, другий ви хід другого блока нормалізаторів через другий блок контролю датчиків з'єднаний із другим шинним формувачем, третій вихід др угого блока нормалізаторів через другий комутатор, др угий аналого-цифровий перетворювач з'єднаний із другим операційним блоком, виходи якого з'єднані з другим шинним формувачем, другим комутатором та другим аналого-цифровим перетворювачем, окрім того, др угий операційний блок та другий блок реєстрації параметрів входами-виходами з'єднані між собою, вхід, що залишився, блока обчислювача є п'ятим входом системи, а вихід блока обчислювача є першим виходом системи, другим та третім виходами системи є виходи першого та другого блоків автоматичного управління, відповідно. Введення в систему додаткових ознак, а саме: другого перетворювача частота-код, другого комутатора, двох шинних формувачів, двох блоків автоматичного управління, двох блоків реєстрації параметрів, другого блока нормалізаторів, другого аналого-цифрового перетворювача, двох блоків контролю датчиків та другого блока формувачів дозволяє забезпечити: - безперервний запис параметрів, незалежно за кожним двигуном, силової установки літального апарата, що дозволить визначити фізичні значення параметрів та їх зміни в залежності від режиму її роботи для забезпечення надійної експлуатації газотурбінної (силової) установки за технічним станом, що дозволить, в свою чергу, визначити, за яким конкретно параметром кожний газотурбінний двигун силової установки вийшов на аварійний режим роботи; - безперервну реєстрацію дискретних сигналів порушення ланцюгів датчиків та команд управління агрегатами кожного окремо газотурбінного двигуна силової установки, що дозволить на етапі дешифрування польотних даних, зареєстрованих системою, визначити, на якому конкретно датчику сталося порушення ланцюга та правильність функціонування блока автоматичного управління за видачею сигналів (команд) управління агрегатами; - незалежне автоматичне управління агрегатами кожного двигуна силової установки; - достатню функціональну надійність експлуатації силової установки літального апарата, бо контроль та управління агрегатами кожного двигуна здійснюється незалежними каналами. Як видно з вищезазначеного, запропоноване технічне рішення має суттєві ознаки, які дозволяють поширити функціональні можливості, область застосування системи та підвищити функціональну надійність експлуатації силової установки літального апарату, що, в свою чергу, дозволить забезпечити надійну експлуатацію силової установки за технічним станом та скоротити час на усування відмов у ланцюгах да тчиків газотурбінних двигунів та понизити вартість експлуатації силової установки, а також скоротити простій авіаційної техніки. Принцип роботи запропонованої системи пояснюється фігурою, на якій показана структурна схема системи. Система містить блок 1 нормалізаторів, комутатор 2, аналого-цифровий перетворювач 3, операційний блок 4, блок 5 обчислювача, блок 6 формувачів, перетворювач 7 частота-код, другий операційний блок 8, другий блок 9 формувачів, блок 10 автоматичного управління, блок 11 контролю датчиків, блок 12 реєстрації параметрів, шинний формувач 13, другий перетворювач 14 частота-код, другий блок 15 автоматичного управління, другий шинний формувач 16, др угий блок 17 нормалізаторів, другий блок 18 контролю датчиків, другий комутатор 19, другий аналого-цифровий перетворювач 20 та другий блок 21 реєстрації параметрів. Блок 1 нормапізаторів першим виходом через послідовно з'єднані комутатор 2, аналого-цифровий перетворювач 3, операційний блок 4 з'єднаний з першим входом блоку 5 обчислювача, другий вихід блоку 1 нормалізаторів через блок 11 контролю датчиків з'єднаний з шинним формувачем 1З та блоком 10 автоматичного управління, другий вхід якого з'єднаний з третім виходом блоку 1 нормалізаторів, другий блок 9 формувачів з'єднаний безпосередньо з блоком 10 автоматичного управління, а через перетворювач 14 частота-код - з операційним блоком 4, з'єднані між собою входи блока 9 формувачів та блока 11 контролю датчиків підключені до першого входу системи, вхід блока 1 нормалізаторів підключено до другого входу системи, шинний формувач 13 з'єднаний з третім входом операційного блока 4, виходи якого з'єднані з комутатором 2, аналого-цифровим перетворювачем 3, перетворювачем 14 частота-код та шинним формувачем 13, вхід якого, що залишився, з'єднаний з блоком 10 автоматичного управління, операційний блок 4 та блок 12 реєстрації параметрів входами-виходами з'єднані між собою, а вхід операційного блоку 4, який залишився, з'єднаний з блоком 5 обчислювача, другий блок 17 нормалізаторів через послідовно з'єднані другий комутатор 19, другий аналого-цифровий перетворювач 20 та другий операційний блок 8 підключено до блока 5 обчислювача, другий вихід блока 17 нормалізаторів через другий блок 18 контролю датчиків з'єднаний із другим шинним формувачем 16 та другим блоком 15 автоматичного управління, третій вихід другого блока 17 нормалізаторів, який залишився, з'єднаний із другим блоком 15 автоматичного управління, вихід якого через другий шинний формувач 16 з'єднаний із другим операційним блоком 8, блок 6 формувачів з'єднаний безпосередньо із другим блоком 15 автоматичного управління, а через перетворювач 7 частота-код - з операційним блоком 8, з'єднані між собою входи блока 6 формувачів та блока 18 контролю датчиків підключено до третього входу системи, а вхід блока 17 нормалізаторів підключено до четвертого входу системи, виходи другого операційного блока 8 з'єднані з перетворювачем 7 частота-код, шинним формувачем 16, комутатором 19 та аналого-цифровим перетворювачем 20, другий операційний блок 8 та другий блок 21 реєстрації па 3 31643 раметрів входами-виходами з'єднані між собою, вхід др уго го операційного блоку 8, який залишився, з'єднаний з блоком 5 обчислювача, вхід якого, що залишився, з'єднаний з п'ятим входом системи, а його вихід, який залишився, є першим виходом системи, виходи блоків 10 та 15 автоматичного управління, які залишилися, є другим та третім виходами системи, відповідно. Шинні формувачі 13 та 16 можуть бути виповнені на стандартних мікросхемах з трьома станами. Блоки 12 та 21 реєстрації параметрів можуть бути виповнені на стандартних мікросхемах пам'я ті. Блоки 11 та 18 контролю датчиків можуть бути виповнені, використовуючи як технічне рішення за а. с. СРСР № 1339459, кл. G01R31/02 (для контролю частотних датчиків), також і компаратори в інтегральному виконанні (для контролю аналогових датчиків). Блоки 10 та 15 можуть бути виповнені, наприклад, у двох варіантах: - набором незалежних каналів за технічними рішеннями, наданими у а. с. СРСР № 1663976, кл. F02С9/00 (Пристрій управління протиобмерзнувальною системою газотурбінного двигуна); № 1489379, кл. G01Р3/48 (Пристрій для сигналізації про швидкість обертів валу); № 1727445, кл. F02С9/00 (Пристрій для управління газотурбінним двигуном); № 1130018, кл. F02С9/00 (Пристрій для контролю падіння тиску масла у газотурбінному двигуні); № 1602116, кл. F02С9/28 (Сигналізатор найбільшої температури контролюємої середи газотурбінного двигуна); - єдиною комплексною системою на базі технічного рішення, наданого у а. с. СРСР № 1565166, кл. F02С9/28 (Система управління газотурбінним двигуном). Система працює таким чином. При вмиканні напруги живлення система встановлюється у початковий стан, після чого блоки 4, 5, 8, 10 та 15 починають функціонувати за завданими алгоритмами. При працюючому першому двигуні сигнали від аналогових датчиків (вхід 2) надходять до блоку 1 нормалізаторів, які перетворюються у заданий рівень постійної напруги зручного як для аналогоцифрового перетворювання, так і для використання блоком 11 контролю датчиків та блоком 10 автоматичного управління, функціонуючим за завданими алгоритмами. Канали блока 11 контролю аналогових ланцюгів датчиків налагоджуються на рівень напруги нижче ніж рівень напруги, який відповідає, наприклад, нульовому рівню тиску у магістралях повітряних, пальних та масляних двигунах. Канали блока 11 контролю аналогових датчиків приєднуються до вхідних ланцюгів через блок 1 нормалізаторів та при порушенні вхідних ланцюгів або відмові відповідного нормалізатора блока 1 надають сигнали до шинного формувача 13 для забезпечення реєстрації та блок 10 автоматичного управління, які забороняють видачу команд аналоговими каналами. Канали блока 10 автоматичного управління налагоджуються на значення параметрів як мінімальні, так і максимальні, та видають, при відсутності порушення ланцюгів датчиків, команди як при досягненні аварійних режимів роботи газотурбінного двигуна, так і при досягненні завданих (неаварійних) режимів роботи для автоматичного ввімкнення агрегатів, наприклад, пальної, масляної та протиобмерзлювальної системи газотурбінного двигуна. Від частотних датчиків (вхід 1) перемінний сигнал, пропорційний частоті обертання ротору двигуна, надходить до блока 9 формувачів, який формує, наприклад, однополярні прямокутні імпульси, які надходять до перетворювача 14 частотакод та блок 10 автоматичного управління. Ланцюги частотних датчиків приєднані до блока 11 контролю датчиків. Канали блока 11 контролю частотних датчиків при порушенні вхідних ланцюгів видають сигнали до шинного формувача 13, для забезпечення реєстрації, та блок 10 автоматичного управління, які забороняють видачу команд частотними каналами. Частотні канали блока 10 автоматичного управління налагоджуються на завдані значення рівнів обертів від проміжних до максимальних значень. При досягненні завданих рівнів обертів двигуна, при відсутності порушення ланцюгів частотних да тчиків, блок 10 автоматичного управління видає команди для автоматичного ввімкнення агрегатів, наприклад, системи запуску як на землі, так і у повітрі, системи енергозабезпечення. Окрім того, блок 10 видає команди до шинного формувача 13 для забезпечення реєстрації команд, які надходять до агрегатів. Реєстрація текучих значень параметрів першого газотурбінного двигуна від його запуску до зупинки, стан ланцюгів датчиків, а також команд, які видаються блоком 10 автоматичного управління здійснюється у такому порядку. Операційний блок 4 видає сигнали, наприклад, у вигляді двоїстого коду до комутатора 2 для почергового підключення сигналів з виходу блока 1 нормалізаторів, значення яких характеризують фізичний стан першого газотурбінного двигуна. Отже, сигнал з виходу блока 1 через комутатор 2 надходить до аналого-цифрового перетворювача 3, де перетворюється на двоїстий код. З інтервалом часу, який визначається швидкодією аналого-цифрового перетворювача 3, після надання до його входу сигналу з ви ходу комутатора 2, операційний блок 4 видає сигнал до входу аналогоцифрового перетворювача 3. Внаслідок, наприклад, послідовний двоїстий код з виходу аналогоцифрового перетворювача 3 надходить до входу блока 4 та записується у його пам'ять. Після перетворювання усіх аналогових сигналів з виходу блока 1 та запису результатів перетворювання до пам'яті блоку 4 останній припиняє видачу сигналів до комутатора 2. Потім операційний блок 4 видає сигнал до перетворювача 14 частота-код та результат перетворювання частотного сигналу, який надходить з виходу блока 9, наприклад, у вигляді послідовного двоїстого коду надходить до входу операційного блоку 4, де і фіксується у його пам'я ті. Перетворювач 14 частота-код перетворює частотний сигнал, який надходить з виходу блока 9, у двоїстий код, величина якого пропорційна обертам газотурбінного двигуна. Після запису коду, який характеризує рівень обертів двигуна з виходу перетворювача 14, операційний блок 4 видає сигнал до шинного формувача 13 для підключення виходів блока 11 контролю датчиків та блока 10 автоматичного управління до свого входу з наступним записом сигналів, при їх наявності, з блоків 10 та 11 у своїй пам'яті. Після завершення запису сигна 4 31643 лів з блока 11 та блока 10 операційний блок 4 знімає сигнал з шинного формувача 1З і виходи блока 10 та блока 11 відключаються від входу блока 4. Водночас із записом інформації про фізичний стан газотурбінних двигунів у пам'яті операційних блоків 4 та 8 блок 5 обчислювача приймає інформацію про просторове положення літального апарату, його швидкості, висоті, положенні ручки управління двигуном правим (лівим) і т. п. від системи контролю параметрів літального апарату та надає безперервно до блоків 4 та 8, наприклад, у вигляді послідовного адресного коду. Операційні блоки 4 та 8 обирають за адресами необхідну інформацію та записують її до своєї пам'яті, чим припиняється цикл запису значень параметрів, які реєструються, у пам'яті операційного блока 4. Необхідність запису інформації про просторове положення літального апарату, його швидкості, висоті, положення ручки управління двигуном і т. п. складається з того, що без цієї ін формації неможливо повноцінно оцінити технічний стан двигунів силової установки. Операційним блоком 4 із записаної у його пам'яті інформації формується кадр, який ним же переписується за відповідними адресами блока 12 реєстрації параметрів. Блоком 4 кадр може формуватися і з кількох циклів вимірювання параметрів, наприклад, секундний кадр. Водночас із реєстрацією параметрів про технічний стан газотурбінного двигуна у блоці 12 операційний блок 4, безперервно надає до блока 5, наприклад, у вигляді послідовного адресного коду, інформацію про технічний стан першого газотурбінного двигуна. Режим перезапису кадру інформації з блока 4 до блока 12 та наступний цикл вимірювання параметрів може виконуватися як послідовно, так і паралельно в залежності від співвідношення часу вимірювання параметрів із формуванням кадру та часу перезапису кадру з блока 4 до блока 12 реєстрації параметрів. Цим і завершується цикл запису параметрів газотурбінного двигуна, стан ланцюгів датчиків та команд, які видаються блоком 10 до блока 12 реєстрації параметрів, після чого операційний блок 4 надає сигнали до комутатора 2, при послідовному режимі запису кадру та вимірювання параметрів і цикл реєстрації сигналів, які характеризують фізичний стан першого газотурбінного двигуна силової установки літального апарата, повторюється згідно з зазначеним вище алгоритмом. Алгоритм контролю, управління та реєстрації параметрів, які характеризують технічний стан другого газотурбінного двигуна дводвигунної силової установки, аналогічний вищезазначеному алгоритму контролю, управління та реєстрації параметрів першого газотурбінного двигуна здійснюється у такому порядку. При працюючому другому двигуні сигнали від аналогових датчиків (вхід 4) надходять до блока 17 нормалізаторів, які перетворюються у завданий рівень постійної напруги зручного як для аналого-цифрового перетворювання, так і для використання блоком 18 контролю датчиків та блоком 15 автоматичного управління, функціонуючим за завданими алгоритмами. Канали блоку 18 контролю аналогових ланцюгів датчиків налагоджу ються на рівень напруги нижче ніж рівень напруги, який відповідає, наприклад, нульовому рівню тиску у магістралях повітряних, пальних та масляних двигуна. Канали блока 18 контролю аналогових датчиків приєднуються до вхідних ланцюгів через блок 17 нормалізаторів та при порушенні вхідних ланцюгів або відмові відповідного нормалізатора блока 17 надають сигнали до шинного формувача 16 для забезпечення реєстрації та блок 15 автоматичного управління, які забороняють видачу команд аналоговими каналами. Канали блока 15 автоматичного управління налагоджуються на значення параметрів як мінімальні, так і максимальні та видають, при відсутності порушення ланцюгів датчиків, команди як при досягненні аварійних режимів роботи газотурбінного двигуна, так і при досягненні завданих (неаварійних) режимів роботи для автоматичного ввімкнення агрегатів, наприклад, пальної, масляної та протиобмерзлювальної системи газотурбінного двигуна. Від частотних датчиків (вхід 3) перемінний сигнал, пропорційний частоті обертання ротора двигуна, надходить до блока 6 формувачів, який формує, наприклад, однополярні прямокутні імпульси, які надходять до перетворювача 7 частота-код та блок 15 автоматичного управління. Ланцюги частотних датчиків приєднані до блока 18 контролю датчиків. Канали блока 18 контролю частотних датчиків при порушенні вхідних ланцюгів видають сигнали до шинного формувача 16, для забезпечення реєстрації, та блок 15 автоматичного управління, які забороняють видачу команд частотними каналами. Частотні канали блока 15 автоматичного управління налагоджуються на завдані значення рівнів обертів від проміжних до максимальних значень. При досягненні завданих рівнів обертів двигуна, при відсутності порушення ланцюгів частотних датчиків, блок 15 автоматичного управління видає команди для автоматичного ввімкнення агрегатів, наприклад, системи запуску як на землі, так і у повітрі, системи енергозабезпечення. Окрім того, блок 15 видає команди до шинного формувача 16 для забезпечення реєстрації команд, які надходять до агрегатів. Реєстрація текучих значень параметрів другого газотурбінного двигуна від його запуску до зупинки, стан ланцюгів датчиків, а також команд, які видаються блоком 15 автоматичного управління, здійснюється у такому порядку. Операційний блок 8 видає сигнали, наприклад, у вигляді двоїсто го коду до комутатора 19 для почергового підключення сигналів з виходу блока 17 нормалізаторів, значення яких характеризують фізичний стан другого газотурбінного двигуна. Отже, сигнал з виходу блока 17 через комутатор 19 надходить до аналого-цифрового перетворювача 20, де перетворюється на двоїстий код. З інтервалом часу, який визначається швидкодією аналогоцифрового перетворювача 20, після надання до його входу сигналу з виходу комутатора 19, операційний блок 8 видає сигнал до входу аналогоцифрового перетворювача 20. Внаслідок, наприклад, послідовний двоїстий код з виходу аналогоцифрового перетворювача 20 надходить до входу блока 8 та записується у його пам'ять. Після перетворювання усіх аналогових сигналів з виходу блока 17 та запису результатів перетворювання 5 31643 до пам'яті блоку 8, останній припиняє видачу сигналів до комутатора 19. Потім операційний блок 8 видає сигнал до перетворювача 7 частота-код та результат перетворювання частотного сигналу, який надходить з виходу блока 6, наприклад, у вигляді послідовного двоїстого коду надходить до входу операційного блока 8, де і фіксується у його пам'яті. Перетворювач 7 частота-код перетворює частотний сигнал, який надходить з виходу блока 6, у двоїстий код, величина якого пропорційна обертам газотурбінного двигуна. Після запису коду, який характеризує рівень обертів двигуна з виходу перетворювача 7, операційний блок 8 видає сигнал до шинного формувача 16 для підключення виходів блока 18 контролю датчиків та блока 15 автоматичного управління до свого входу з наступним записом сигналів, при їх наявності, з блоків 15 та 18 у своїй пам'яті. Після завершення запису сигналів з блока 18 та блока 15 операційний блок 8 знімає сигнал з шинного формувача 16 і виходи блока 15 та блока 18 відключаються від входу блока 8. Водночас із записом інформації про фізичний стан газотурбінних двигунів у пам'яті операційних блоків 4 та 8 блок 5 обчислювача приймає інформацію про просторове положення літального апарату, його швидкості, висоті, положенні ручки управління двигуном правим (лівим) і т. п. від системи контролю параметрів літального апарату та надає безперервно до блоків 4 та 8, наприклад, у вигляді послідовного адресного коду. Операційні блоки 4 та 8 обирають за адресами необхідну інформацію та записують її до своєї пам'я ті, чим припиняється цикл запису значень параметрів, які реєструються, у пам'яті операційного блока 8. Необхідність запису інформації про просторове положення літального апарату, його швидкості, висоті, положення ручки управління двигуном і т. п. складається з того, що без цієї інформації неможливо повноцінно оцінити технічний стан двигунів силової установки. Операційним блоком 8 із записаної у його пам'яті інформації формується кадр, який ним же переписується за відповідними адресами блока 21 реєстрації параметрів. Блоком 8 кадр може формуватися із кількох циклів вимірювання параметрів, наприклад, секундний кадр. Водночас із реєстрацією параметрів про технічний стан газотурбінного двигуна у блоці 21 операційний блок 8, безперервно надає до блока 5, наприклад, у вигляді послідовного адресного коду, інформацію про технічний стан другого газотурбінного двигуна. Режим перезапису кадру інформації з блока 8 до блока 21 та наступний цикл вимірювання параметрів може виконуватися як послідовно, так і паралельно, в залежності від співвідношення часу вимірювання параметрів із формуванням кадру та часу перезапису кадру з блока 8 до блока 21 реєстрації параметрів. Цим і завершується цикл за пису параметрів газотурбінного двигуна, стан ланцюгів датчиків та команд, які видаються блоком 15 до блока 21 реєстрації параметрів, після чого операційний блок 8 надає сигнали до комутатора 19 при послідовному режимі запису кадру та вимірювання параметрів і цикл реєстрації сигналів, які характеризують фізичний стан другого газотурбінного двигуна силової установки літального апарата, повторюється згідно з зазначеним вище алгоритмом. Блок 5 обчислювача приймає інформацію про просторове положення літального апарату, його швидкості, висоті, положення ручки управління двигуном правим (лівим), фізичний стан газотурбінних двигунів з операційних блоків 4 та 8, аналізує її, наприклад, за допусками або перетворює коди, наприклад, у значення температури, висоту, швидкість і т. п. та видає у систему відображення інформації у кабіну літального апарату або у мовний інформатор. Блоки 12 та 21 реєстрації параметрів є експлуатаційними накопичувачами інформації, яка характеризує технічний стан газотурбінних двигунів, тривалість накопичування може бути, наприклад, 50 годин. При завершені часу накопичування інформації до системи приєднується зчитувальна апаратура, яка почергово до входу операційних блоків 4 та 8 по лініях зв'язку (у кресленні не показано) надає інформацію, наприклад, у вигляді двоїстого коду, під дією якої блоки 4 та 8 переходять у режим зчитування накопиченої інформації блоками 12 та 21. У цьому режимі операційні блоки 4 та 8 надають до блоків 12 та 21, відповідно, адресні кодові значення для забезпечення послідовного зчитування двоїстого коду (накопиченої інформації), через операційні блоки 4 та 8 - до наземної апаратури. Зчитана інформація надсилається до центру дешифр ування польотних даних, де аналізується стан газотурбінних двигунів, у тому числі ланцюгів датчиків та правильність видачі команд управління до агрегатів двигунів та визначається або необхідність проведення різноманітних профілактичних (ремонтних) заходів, або подальша експлуатація. Запропоноване технічне рішення за рахунок накопичування великого об'єму інформації, що характеризує як технічний стан газотурбінних двигунів, так і просторове положення літального апарату та його характеристики (висота, швидкість, температура оболонки і т. п.), стан ланцюгів датчиків та правильність видачі керуючих команд до агрегатів газотурбінних двигунів, забезпечить надійну експлуатацію силової установки за технічним станом, скоротить час щодо усування відмов в обладнанні двигунів, а також забезпечить прогнозування технічного стану газотурбінних двигунів, що дозволить визначити технічний ресурс силової установки літального апарату. 6 Фіг. 31643 7 31643 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 8
ДивитисяДодаткова інформація
Назва патенту англійськоюFlying apparatus power set parameters control and recording system
Автори англійськоюBezschastnyi Vasyl Oleksiiovych
Назва патенту російськоюСистема контроля и регистрации параметров силовой установки летательного аппарата
Автори російськоюБессчастный Василий Алексеевич
МПК / Мітки
МПК: F02C 9/28, G06F 15/16
Мітки: літального, установки, система, контролю, параметрів, апарата, реєстрації, силової
Код посилання
<a href="https://ua.patents.su/8-31643-sistema-kontrolyu-ta-reehstraci-parametriv-silovo-ustanovki-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система контролю та реєстрації параметрів силової установки літального апарата</a>
Система контролю параметрів газотурбінного двигуна
Номер патенту: 33516
Опубліковано: 17.12.2001
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28, G06F 11/273
Мітки: газотурбінного, контролю, система, параметрів, двигуна
Формула / Реферат:
Система контролю параметрів газотурбінного двигуна, яка містить послідовно з'єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач та операційний блок, яка відрізняється тим, що додатково введені блок контролю вхідних ланцюгів, блок еталонів, другий комутатор та блок узгодження, вхід якого з'єднано з входом системи, а вихід - через другий комутатор з'єднано із входом блока нормалізаторів, окрім того, вихід блока узгодження...
Система керування та контролю параметрів газотурбінного двигуна
Номер патенту: 22952
Опубліковано: 15.11.2001
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: параметрів, газотурбінного, система, контролю, керування, двигуна
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом...
Система управління та контролю параметрів газотурбинного двигуна
Номер патенту: 22952
Опубліковано: 05.05.1998
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: двигуна, управління, контролю, параметрів, система, газотурбінного
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом...
Система для гідрологічних спостережень та пристрій для контролю параметрів води
Номер патенту: 35984
Опубліковано: 16.04.2001
Автори: Світлицький Олександр Михайлович, Світлицький Анатолій Михайлович, Федосеєв Олександр Сергійович, Федосеєва Олена Анатоліївна
МПК: G01F 23/24, G01F 23/00
Мітки: система, спостережень, пристрій, параметрів, води, гідрологічних, контролю
Формула / Реферат:
1. Система для гідрологічних спостережень, вміщувща гідрологічний зонд з датчиками контролю рівня води, її температури та електропроводності, контейнер з лебідкою, блоком електроживлення та центральным керуючим пристрівм з аналого-цифровим перетворювачем на вході, яка відрізняється тим, що система обладнана блоком прецізійних вимірів аналогових сигналів, включеним між виходами вимірювальних датчиків та центральним керуючим пристрієм,...
Система управління двигуновою установкою літального апарата
Номер патенту: 18763
Опубліковано: 25.12.1997
Автори: Распопов Євген Вікторович, Епельбаум Анатолій Григорович, Світський Олег Лазаревич, Іщук Віктор Петрович
МПК: B64D 31/00
Мітки: апарата, установкою, двигуновою, літального, система, управління
Формула / Реферат:
Система управления двигательной установкой летательного аппарата, содержащая рычаг управления двигателем, кинематически соединенный с электрическим приводом и датчиком угла отклонения рычага управления двигателем, механизм подачи топлива, кран топливного агрегата, блок аэродинамических данных, блок расчета требуемой тяги, выход которого соединен с делителем, отличающаяся тем, что она дополнительно снабжена блоком расчета командной тяги,...
Наступний патент: Спосіб виготовлення світлого пива
Випадковий патент: Імпульсна газорозрядна лампа на молекулах йоду