Радіолокатор із безупинним сигналом
Номер патенту: 40129
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович

Формула / Реферат
Радіолокатор із безупинним сигналом, що містить антену, що передає, передавач безупинного сигналу з генератора високої частоти, генератора низької частоти, що модулює, і модулятора, приймальну антену, приймач і фазовимірювач, що відрізняється тим, що передавач виконаний із частотно-модульованим сигналом, на виході приймача додатково установлений фільтр нижніх частот і фільтр верхніх частот, до складу устрою додатково включені два фільтри низької частоти, що модулює, два амплітудних детектори сигналів доплерівських частот, два амплітудних обмежувачі, два вимірювачі частот Доплера і фазовимірювач, фільтри частоти, що модулює, установлені відповідно на виходах фільтрів нижніх і верхніх частот і пов'язані зі своїми амплітудними обмежувачами, на виходах яких установлені вимірювачі частот Доплера, фільтри частоти, що модулює, пов'язані також із своїми амплітудними детекторами сигналів на частотах Доплера, виходи яких пов'язані зі своїми фазовимірювачами, виходи фазометров і вимірювачів частот Доплера пов'язані з обчислювачем радіальних швидкостей і дальностей літака і ракети, що наводиться на нього, по співвідношеннях
![]()
![]()
![]() ,
,
![]() ,
,
де Vрц, Vpp - радіальні швидкості літака (цілі) і ракети відповідно,
rц, rр - дальності літака і ракети відповідно,
λ - довжина хвилі,
Fдц - доплерівська частота літака, рівна показанню першого вимірювача частоти Доплера,
FД2 - доплерівська частота, рівна показанню другого вимірювача частоти Доплера,
с - швидкість світла,
φ1, φ2 - зсуви фаз сигналу генератора низької частоти передавача, що модулює, щодо сигналів цієї ж частоти на виходах першого і другого амплітудних детекторів сигналів доплерівських частот,
F - частота передавача, що модулює.
Текст
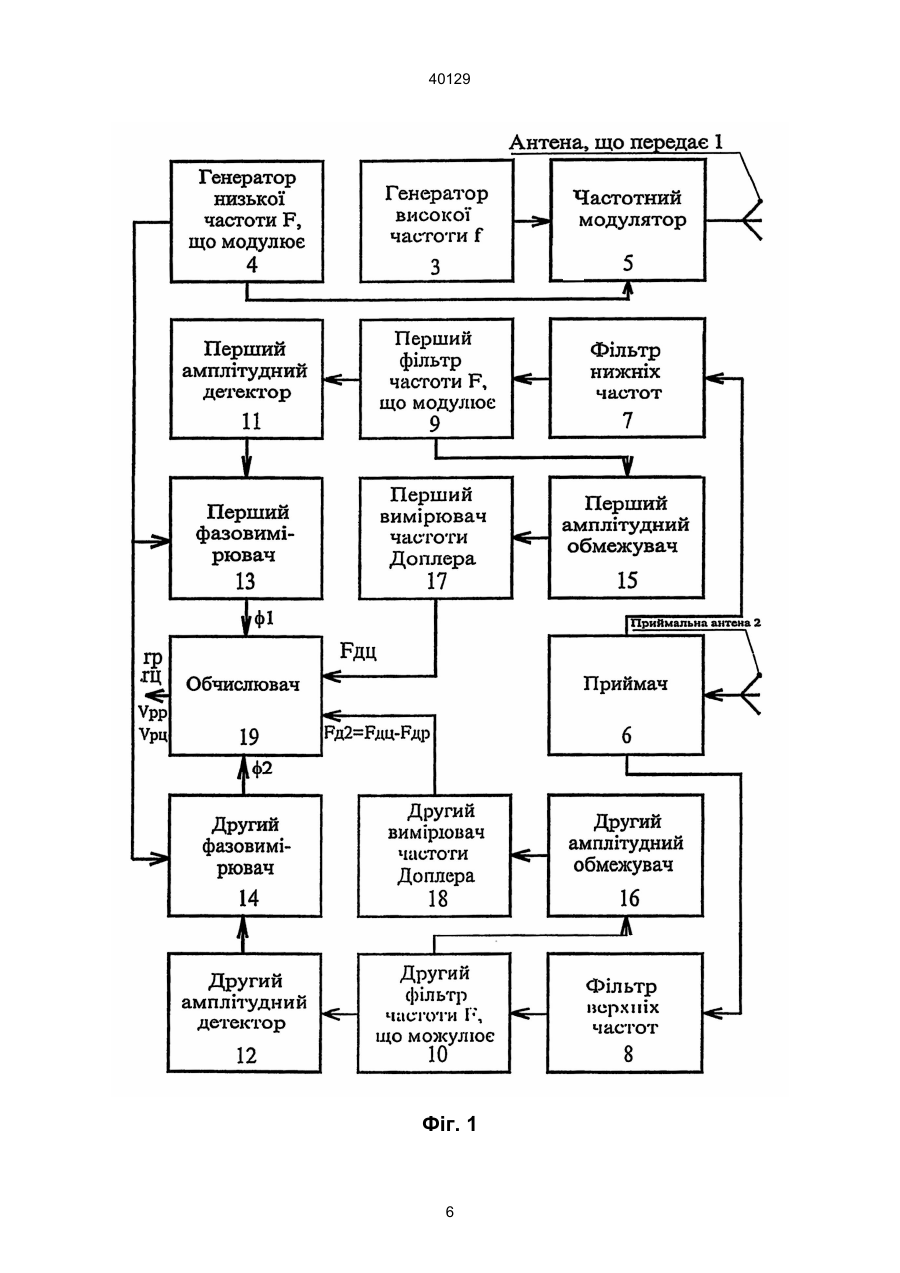
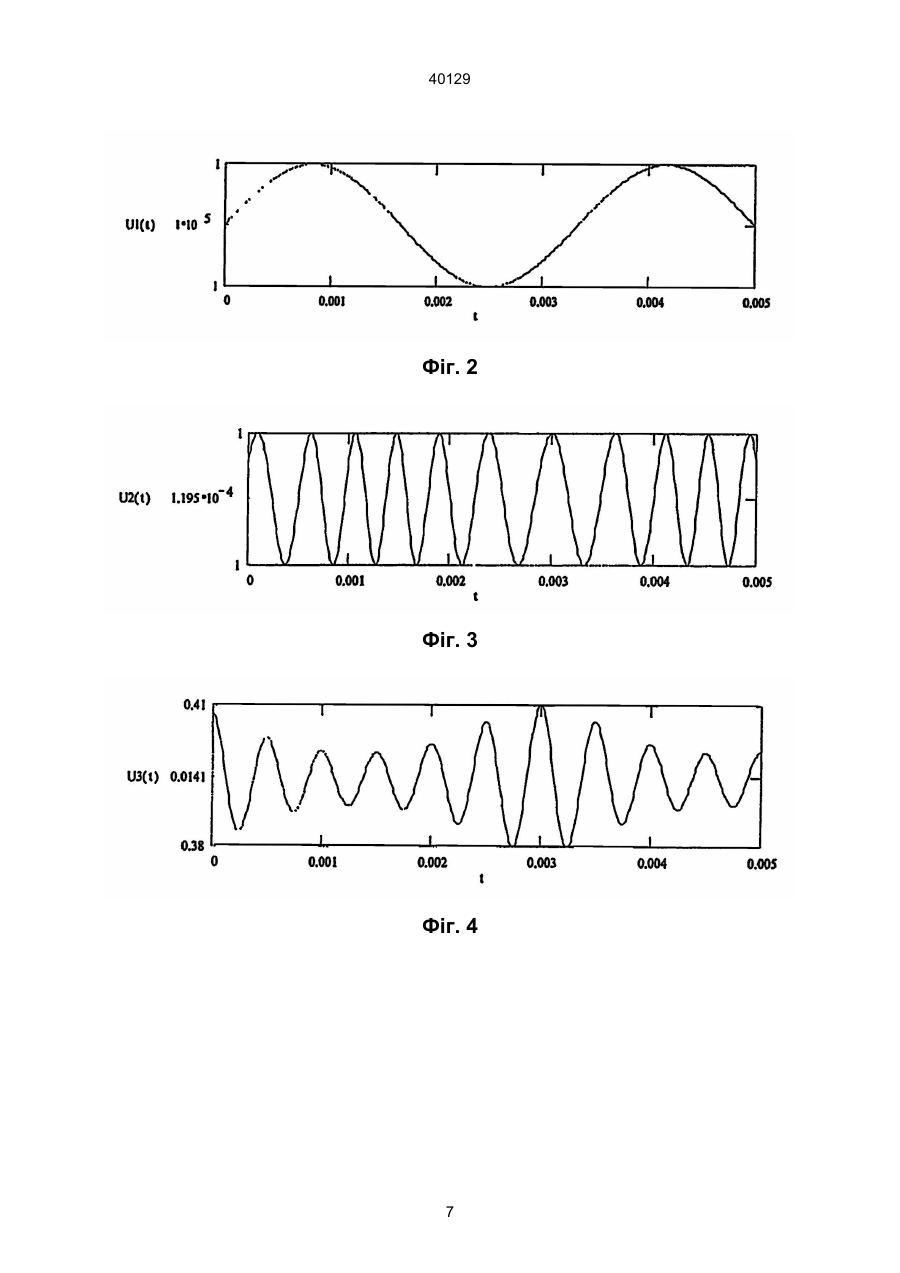
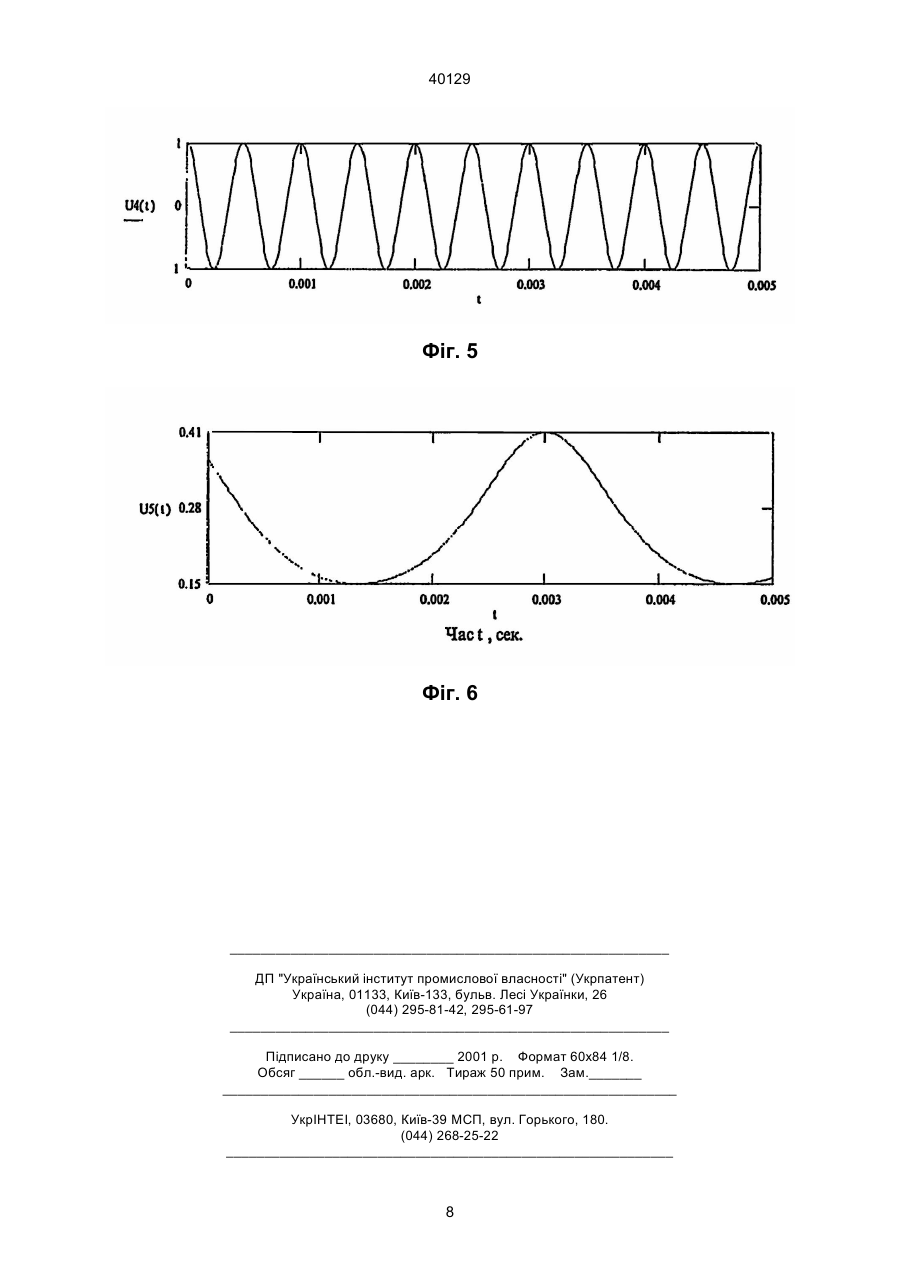
Радіолокатор із безупинним сигналом, що містить антену, що передає, передавач безупинного сигналу з генератора високої частоти, генератора низької частоти, що модулює, і модулятора, приймальну антену, приймач і фазовимірювач, що відрізняється тим, що передавач виконаний із частотно-модульованим сигналом, на виході приймача додатково установлений фільтр нижніх частот і фільтр верхніх частот, до складу пристрою додатково включені два фільтри низької частоти, що модулює, два амплітудних детектори сигналів доплерівських частот, два амплітудних обмежувачі, два вимірювачі частот Доплера і фазовимірювач, фільтри частоти, що модулює, установлені відповідно на виходах фільтрів нижніх і верхніх частот і пов'язані зі своїми амплітудними обмежувачами, на виходах яких установлені вимірювачі частот Доплера, фільтри частоти, що модулює, пов'язані також із своїми амплітудними детекторами сигналів на частотах Доплера, виходи яких пов'язані зі своїми фазовимірювачами, виходи фазометрів і вимірювачів частот Доплера пов'язані з обчислю вачем радіальних швидкостей і дальностей літака і ракети, що наводиться на нього, по співвідношеннях Винахід належить до області радіолокації і може бути використаний в радіолокаторах безупинного випромінювання мікрохвильового діапазону для одночасного виміру дальностей і радіальних швидкостей двох цілей, наприклад, літака і ракети, що наводиться на нього. Відомий імпульсний радіолокаційний далекомір [1, с. 13, рис. 1.1]. Аналог містить імпульсний передавач, антену з антенним перемикачем і приймач. Дальність цілі визначають за часом запізнювання імпульсу луна-сигналу щодо імпульсу, що зондує. Хибою аналога є те, що він не може вимірювати малі дальності менше добутку швидкості світла на половину тривалості імпульсу. Як прототип обраний фазовий радіолокатор із безупинним випромінюванням [1]. До складу прототипу входять такі основні елементи: антена, що передає; передавач із генератора високочастотного безупинного сигналу, генератора низькочастотної напруги, що модулює, і модулятора (наприклад, амплітудного модулятора); приймальна антена; екран розв'язки антен; приймач (наприклад, супергетеродинний приймач з амплітудним детектором); де: Vрц, Vpp - радіальні швидкості літака (цілі) і ракети, відповідно, rц, rр - дальності літака і ракети, відповідно, λ - довжина хвилі, FДЦ - доплерівська частота літака, рівна показанню першого вимірювача частоти Доплера, FД2 - доплерівська частота, рівна показанню другого вимірювача частоти Доплера, с - швидкість світла, φ1, φ2 - зсуви фаз сигналу генератора низької частоти передавача, що модулює, щодо сигналів цієї ж частоти на виходах першого і другого амплітудних детекторів сигналів доплерівських частот, F - частота передавача, що модулює. A ), (13) 2 с(j1 - p ) rц = , 2pF c(j 2 - j1) rp = , 2 pF 40129 ( (11) , 2 l FД2 - FДЦ UA Vрр = lFДЦ (19) Vрц = 40129 два амплітудних обмежувачі, два вимірювачі частот Доплера і фазовимірювач; фільтри частоти, що модулює, установлені, відповідно, на виходах фільтрів нижніх і верхніх частот і пов'язані зі своїми амплітудними обмежувачами, на виходах яких установлені вимірювачі частот Доплера; фільтри частоти, що модулює, пов'язані також із своїми амплітудними детекторами сигналів на частотах Доплера, виходи яких пов'язані зі своїми фазовимірювачами; виходи фазовимірювачів і вимірювачів частот Доплера пов'язані з обчислювачем радіальних швидкостей і дальностей літака і ракети, що наводиться на нього, за співвідношеннями фазовимірювач зсуву фаз вихідної низькочастотної напруги приймача щодо напруги генератора передавача, що модулює. Вимір дальності цілі в прототипі засновано на вимірі зсуву фаз (вихідної низькочастотної напруги приймача щодо напруги передавача, що модулює. При цьому дальність цілі визначають за співвідношенням D= cj , 4 pF (1) де: D - дальність цілі; с - швидкість світла; φ- зсув фаз вихідної напруги приймача щодо напруги низькочастотного генератора сигналу передавача, що модулює; F - частота сигналу, що модулює. Антени прототипу рознесені в просторі й екрановані одна від одної за допомогою екрана розв'язки для того, щоб прямі радіохвилі антени, що передає, не потрапляли в приймальну антену і не перешкоджали приймати луна-сигнали цілі. Хибою прототипу є те, що він забезпечує вимір дальності тільки однієї цілі і не може одночасно вимірювати дальності двох цілей. Задача одночасного виміру дальностей двох цілей має практичне значення, наприклад, при наведенні з землі ракети на літак. Інша хиба прототипу полягає в тому, що такий радіолокатор не може вимірювати радіальні швидкості цілей. Третьою хибою прототипу є те, що в його склад входить громіздкий екран розв'язки антен, що істотно ускладнює конструкцію антенної системи радіолокатора. В основу винаходу поставлена задача удосконалення радіолокатора з безупинним сигналом, у якому за рахунок виконання передавача з частотно-модульованим сигналом і додатковим умиканням до складу пристрою фільтрів нижніх і верхніх частот, двох амплітудних детекторів, двох обмежувачів, двох вимірювачів частоти і другого фазовимірювача забезпечується поділ, що модулює, і доплерівських частот і визначення дальностей і радіальних швидкостей двох цілей (наприклад, літака і ракети, що наводиться на нього), а також вилучення зі складу пристрою екрана розв'язки антен, що істотно спрощує конструкцію антенної системи радіолокатора. Поставлена задача вирішується тим, що в радіолокаторі з безупинним сигналом, що містить антену, що передає, передавач безупинного сигналу з генератора високої частоти, генератора низької частоти, що модулює, і модулятора, приймальну антену, приймач з амплітудним детектором сигналу на проміжній частоті і фазовимірювач, відповідно до винаходу передавач виконаний із частотно-модульованим сигналом; на виході амплітудного детектора приймача додатково установлений фільтр нижніх частот і фільтр верхніх частот; до складу пристрою додатково включені два фільтри низької частоти, що модулює, два ампулітудних детектори сигналів доплерівських частот, Vрц = Vpp = lFДЦ 2 (2) , l ( FД 2 - FДЦ ) 2 с(j1 - p) rц = , 2pF c(j 2 - j1) rp = , 2 pF , (3) (4) (5) де Vpц, Vpp - радіальні швидкості літака (цілі) і ракети, відповідно; rц, rр - дальності літака і ракети, відповідно; λ - довжина хвилі; FДЦ - доплерівська частота літака, яка дорівнює показанню першого вимірювача частоти Доплера; FД2 - доплерівська частота, яка дорівнює показанню другого вимірювача частоти Доплера; с - швидкість світла; φ1, φ2 - зсуви фаз сигналу генератора низької частоти передавача, що модулює, щодо сигналів цієї ж частоти на виходах першого і другого амплітудних детекторів сигналів доплерівських частот; F - частота передавача, що модулює. При цьому екран розв'язки антен, що був у прототипі, зі складу запропонованого пристрою виключений. Припускається також, що низька частота F сигналу передавача, що модулює, нижче доплерівських частот луна-сигналів літака і ракети, доплерівська частота ракети більше доплерівської частоти літака, літак наближається до радіолокатора, а ракета віддалиться від нього. Верхня межа смуги пропускання фільтра нижніх частот нижче доплерівської частоти ракети, але вище доплерівської частоти літака. Нижня межа смуги пропускання фільтра верхніх частот трохи вище доплерівської частоти ракети. Додаткове вмикання до складу пристрою фільтрів нижніх і верхніх частот забезпечує поділ доплерівських частот літака і ракети, а використання фільтрів частоти, що модулює, амплітудних детекторів сигналів на частотах Доплера й амплітудних обмежувачів забезпечує поділ сигналів що модулює і доплерівських частот. При цьому дальності літака і ракети визначають по фазах сигналів частоти, що модулює, а радіальні швидкості - по доплерівським частотах. Запропонований пристрій використовує в каналі прийому прямі сигнали антени, що передає, що дозволяє виключити зі скла 2 40129 ду пристрою екран розв'язки антен і істотно спростити конструкцію антенної системи. Технічна сутність і принцип дії запропонованого пристрою пояснюють на фіг. 1, 2. На фіг. 1 надано спрощену структурну схему радіолокатора з безупинним сигналом, а на фіг. 2 надано спрощені епюри сигналу передавача, що модулює; на фіг. 3 - сигналів на виходах фільтра нижніх частот; на фіг. 4 - першого фільтра частоти, що модулює; на фіг. 5 - першого амплітудного обмежувача; на фіг. 6 - першого амплітудного детектора сигналу на частоті Доплера літака. До складу запропонованого пристрою на схемі (фіг. 1) входять такі основні елементи: антена, що передає 1; приймальна антена 2; передавач, що складається з генератора 3 високої частоти f, генератора 4 низької частоти, що модулюють F, і частотні модулятори 5; приймач 6 луна-сигналів, наприклад, супергетеродинний приймач зі своїм гетеродином, змішувачем і амплітудним детектором; фільтр нижніх частот 7, верхня гранична частота смуги пропускання котрого нижче доплерівської частоти ракети, але вище доплерівської частоти літака; фільтр верхніх частот 8, нижня гранична частота смуги пропускання котрого трохи вище доплерівської частоти ракети; перший 9 і другий 10 фільтри частоти, що модулює, настроєні на низьку частоту F сигналу, що модулює; перший 11 і другий 12 амплітудні детектори сигналів на доплерівськпх частотах із виходів фільтрів 9 , 10, відповідно; перший 13 і другий 14 фазовимірювачі зсувів фаз φ1, φ2 сигналу передавача, що модулює, щодо сигналів на частоті F із виходу амплітудних детекторів 11, 12, відповідно; перший 15 і другий 16 амплітудні обмежувачі сигналів на частотах Доплера FДЦ, FД2 з виходів фільтрів 9, 10, відповідно; перший 17 і другий 18 вимірювачі частот Доплера FДЦ і FД2 літака і ракети; обчислювач 19 дальностей rц, rр і радіальних швидкостей Vpц ,Vpp літака і ракети за показниками фазовимірювачів φ1, φ2 і частот Доплера FДЦ, FД2 за допомогою співвідношень (2-5). Принцип дії запропонованого пристрою пояснюють таким чином. Антена радіолокатора, що передає, випромінює безупинний високочастотний сигнал, модульований по частоті синусоїдальною напругою низької частоти F, що нижче доплерівських частот луна-сигналів літака і ракети. Епюра синусоїдального сигналу передавача, що модулює, на низькій частоті, що модулює F, умовно надана на фіг. 2а. Приймальна антена приймає одночасно луна-сигнали літака і ракети і прямий частотно-модульований сигнал антени, що передає. Луна-сигнали літака і ракети будуть містити свої доплерівські зсуви частоти FДЦ, FДР, а сигнал антени, що передає, такого зсуву не містить. Літак наближається до радіолокатора, а ракета віддалиться від нього, тому умовно покладається, що доплерівська частота літака FДЦ позитивна, а доплерівська частота ракети FДР негативна. Припускається також, що швидкість ракети більше швидко сті літака. В каналі прийому луна-сигнали літака і ракети і сигнал антени, що передає, посилюються, перетворюються на проміжну частоту fПР і детектуються амплітудним детектором приймача з приблизно квадратичною вольт-амперною характеристикою. На виході цього детектора виділяються такі низькочастотні сигнали на різницевих доплерівських частотах: частотно-модульований сигнал на несучій доплерівській частоті літака FДЦ; частотно-модульований сигнал на несучій доплерівській частоті ракети |FДР|; частотно-модульований сигнал на несучій різницевій частоті доплерівських частот літака і ракети FД2=FДЦ-FДР. Ці сигнали промодульовані по частоті сигналом, що модулює, на низькій частоті F. Для визначення дальностей і радіальних швидкостей літака і ракети пропонується використовувати низькочастотний сигнал на доплерівській частоті літака FДЦ і сигнал на різницевій доплерівській частоті FД2. Ці сигнали пропонується розділити за допомогою фільтрів нижніх і верхніх частот, а сигнал на доплерівській частоті ракети |FДР| не використовується і придушується цими ж фільтрами, щоб він не перешкоджав використовувати два інших сигнали. При цьому сигнал на доплерівській частоті літака FДЦ виділяють фільтром нижніх частот 7, а сигнал на доплерівській частоті FД2 виділяють фільтром верхніх частот 8. Це можна зробити, тому що швидкість ракети, звичайно, більше швидкості літака. Частотно-модульовані сигнали на виходах фільтрів 7, 8 містять складові на частоті, що модулює, передавача F і складові на відповідних доплерівських частотах. Ці частотні складові пропонується розділити за допомогою фільтрів 9, 10, настроєних на частоту, що модулює F, сигналу амплітудних детекторів 11, 12 сигналів на частотах Доплера FДЦ, FД2 і амплітудних обмежувачів 15, 16. Далі сигнали на частоті, що модулює F, виділені на виходах амплітудних детекторів 11, 12, пропонується використовувати для виміру дальностей літака і ракети по зсувах фаз φ1, φ2 цих сигналів щодо сигналу генератора, що модулює 4, передавача, а сигнали на частотах Доплера FДЦ, FД2, виділені на виходах амплітудних обмежувачів 15, 16, пропонується використовувати для визначення радіальних швидкостей літака і ракети. Запропоноване технічне рішення дозволяє розділити частотні складові луна-сигналів на частотах FДЦ, FД2 і F, що забезпечує одночасне визначення дальностей і радіальних швидкостей літака і ракети і дозволяє виключити екран розв'язки антен із складу радіолокатора безупинного випромінювання. Для обгрунтування можливості практичної реалізації запропонованого технічного рішення і його істотних відмітних ознак нижче приводяться необхідні математичні співвідношення. Сигнал передавальної антени, що потрапляє в канал прийому, і луна-сигнали літака і ракети на вході амплітудного детектора приймача 6 визначається такими співвідношеннями: u n = U nm cos[ 2pf np t + M sin(2pFt + Ф 0 ) + j0 ], u ц = U mц cos{2 p(f nр + FДЦ )(t - t зц ) + + M sin[2pF( t - t зц ) + Ф 0 ] + j0 }, 3 (6) (7) 40129 u p = U mp cos{2p(f np FДР )( t - t зр ) + + М sin[ 2pF( t - t зр ) + Ф 0 ] + j0 }, Звідси очевидно, що низькочастотні напруги на виходах фільтрів нижніх і верхніх частот подають сигнали на несучих частотах Доплера FДЦ і FД2=FДЦ-FДР, відповідно, модульовані по частоті більш низькою частотою, що модулює F, сигналу, що модулює. Розрахункова епюра низькочастотного сигналу на виході фільтра нижніх частот умовно надана на фіг. 3. Сигнал на виході фільтра верхніх частот буде аналогічний, але несуча частота сигналу буде іншою. Для поділу частотних складових на доплерівських частотах FДЦ, FД2 і частоті, що модулює F, пропонується використовувати фільтри 9, 10 у вигляді контурів, настроєних на низьку частоту, що модулює F, і мають широку смугу пропускання, що охоплює можливий діапазон доплерівських частот. Напруга на виході такого фільтра пропорційна миттєвій частоті частотно-модульованого сигналу. Тобто такий контур перетворить частотно-модульований сигнал в амплітудно-модульований сигнал на відповідній несучій частоті Доплера FДЦ або FД2. Останній промодульований по амплітуді частотою, що модулює F. Розрахункова епюра амплітудно-модульованого сигналу на несучій частоті Доплера FДЦ на виході першого фільтра частоти; що модулює 9, надана фіг. 4. З таких сигналів можна одержати сигнали на доплерівських частотах FДЦ або FД2 за допомогою амплітудних обмежувачів 15, 16, що обмежують неглибоку амплітудну модуляцію вихідних напруг фільтрів 9, 10. Епюра сигналу на частоті Доплера FДЦ на виході першого амплітудного обмежувача 15 надана на фіг. 5. Складові на частоті, що модулює F, не пройдуть на виходи обмежувачів 15, 16 і не будуть перешкоджати вимірювати частоти Доплера FДЦ і FД2 за допомогою вимірювачів частоти 17, 18. Для виділення складових на частоті, що модулює F, із вихідних амплітудно-модульованих сигналів на несучих частотах FДЦ або FД2 з виходів фільтрів 9, 10 пропонується використовувати амплітудні детектори 11, 12. Розрахункова епюра низькочастотного сигналу на частоті, що модулює F, на виході першого амплітудного детектора 11 надана на фіг. 6. Сигнал на виході другого амплітудного детектора 12 аналогічний, але має інший зсув по фазі щодо сигналу передавача, що модулює. З епюр фіг. 2, 6 і співвідношень (12), (13) очевидно, що сигнали частоти F на виходах амплітудних детекторів 11, 12 запізнюються по фазі щодо сигналу передавача, що модулює. Зсув фаз цих сигналів φ1, φ2 щодо сигналу передавача, що модулює, містить інформацію про дальності літака і ракети і дорівнюють (8) де: un - сигнал антени, що передає, на вході амплітудного детектора приймача; uц- луна-сигнал літака на вході амплітудного детектора приймача; up - луна-сигнал ракети на вході амплітудного детектора приймача; Umn, Umц, Ump - амплітуди напруг прямого сигналу антени, що передає, і луна-сигналів літака і ракети, відповідно; fпp - проміжна частота приймача; t - час; М - індекс частотної модуляції передавача; F - частота частотної модуляції передавача; Ф0- початкова фаза сигналу, що модулює; φ0 - початкова фаза сигналу генератора високої частоти передавача; FДЦ - доплерівська частота луна-сигналу літака; FДР - доплерівська частота луна-сигналу ракети (негативна); tзц - час запізнювання луна-сигналу літака, який дорівнює t зц = 2 rц с (9) , rц - дальність літака; с - швидкість світла; tзр - час запізнювання луна-сигналу ракети, який дорівнює t зр = 2rр с (10) , rр - дальність ракети. Амплітудний детектор приймача має, приблизно, квадратичну вольт-амперну характеристику, і напруга на виході цього детектора буде: ( ) u вих = AR н u n + u ц + u р 2 , (11) де: uвих - напруга на виході амплітудного детектора приймача; А - коефіцієнт вольт-амперної характеристики діодів детектора приймача; RH - опір навантаження детектора. Підставляючи співвідношення (6-8) у (11), отримаємо такі співвідношення для напруг uн, uв складових різницевих низьких частот на виходах фільтрів нижніх і верхніх частот, відповідно, u н = AR н U mц U mn cos{2pFДЦ t - 2p(f np + FДЦ ) t зц - 2М sin(pFt зц ) cos[ 2pFt - pFt зц + Ф 0 ]}. j1 = pFt зц + p = 2pF j2 = (12) u в = AR н U mц U mр cos{2p(FДЦ - FДР ) t 2 c + p; ) + p. (14) (15) Співвідношення (14), (15) отримані з (12), (13) з урахуванням характеристик фільтрів 9, 10 і детекторів 11, 12. З співвідношень (14), (15) отримані співвідношення (4), (5), що рекомендується використовувати для визначення дальностей літака і ракети rц, rр за показниками φ1, φ2 фазовимірювачів 13, 14. Ці фазовимірювачі Vpp визначають за - 2p(f np + FДЦ ) t зц + 2p(f np + FДР ) t зр - 2M sin[ pF( t зц - t зр )] ´ ( 2pF t зц + t зр rц (13) t зц + t зр æ ö ´ cos ç 2pFt - 2pF + Ф 0 ÷}. ç ÷ 2 è ø 4 40129 результатом виміру частот Доплера FДЦ і FД2 вимірювачами частоти 17, 18 за допомогою відомих співвідношень. Фільтри нижніх і верхніх частот 7, 8 потребні для поділу доплерівських частот FДЦ і FД2 і придушення доплерівської частоти FДР. Використання фільтрів 9, 10 амплітудних детекторів 11, 12 і амплітудних обмежувачів 15, 16 принципово необхідне для поділу складових на частотах Доплера FДЦ, FД2 і частоті, що модулює F, з низькочастотних напруг із виходів фільтрів 7, 8 нижніх і верхніх частот і забезпечення можливості одночасного виміру дальностей і радіальних швидкостей літака і ракети. Таким чином, запропонований пристрій може бути практично реалізований, а зазначені вище його відмітні ознаки є істотними і принципово необхідні для реалізації цього пристрою. Основні елементи запропонованого пристрою на схемі (фіг. 1) виконані таким чином. Передавач радіолокатора виконаний із генератора 3 синусоїдального сигналу високої частоти, генератора 4 синусоїдального сигналу, що модулює, низької частоти F і частотного модулятора 5. Цей модулятор може бути виконаний, наприклад, за відомою схемою Армстронга. Генератор 4 низької частоти, що модулює F, передавача має два виходи, один із яких пов'язаний із частотними модуляторами 5, а інший - із фазовимірювачами 13, 14. У запропонованому пристрої не потрібно екранувати приймальну антену від передавальної, і в прототипі екран розв'язки антен був виключений, а влучення прямих радіохвиль антени, що передає, у приймальну антену принципово необхідне для роботи пристрою. Приймач 6 виконаний у виді звичайного супергетеродинного приймача зі своїм гетеродином, змішувачем, підсилювачем проміжної частоти й амплітудного детектора, що повинен мати приблизно квадратичну вольт-амперну характеристику. Фільтр нижніх частот 7 пропускає на вихід сигнал на доплерівській частоті літака і не пропускає сигнал на доплерівській частоті ракети. Фільтр верхніх частот 8 має нижню межу смуги пропускання трохи вище доплерівської частоти ракети. Фільтри 9, 10 настроєні на частоту, що модулює F, і повинні мати широку смугу пропускання, що охоплює можливий діапазон доплерівських частот. Припускається, що частота передавача, що модулює, менше доплерівських частот літака і ракети. Амілітудні обмежувачі 15, 16 повинні мати поріг обмеження, що нижче рівня вихідних напруг фільтрів 9, 10. Амплітудні детектори 11, 12 повинні забезпечува ти детектування амплітудно-модульованих сигналів на відповідних несучих доплерівських частотах у всьому діапазоні можливих доплерівських частот. Вимірювачі 17, 18 частот Доплера FДЦ, FД2 мають відому конструкцію. Фазовимірювачі 13, 14 не відрізняються від фазовимірювача прототипу. Обчислювач 19 виконаний у вигляді мікроЕОМ для обчислення радіальних швидкостей і дальностей літака і ракети за допомогою співвідношень (2-5) за результатами вимірів φ1, φ2 і FДЦ, FД2. Динаміка роботи запропонованого пристрою здійснюється таким чином. Передавач формує, а антена, що передає 1, випромінює сигнал, що зондує, у вигляді безупинного сигналу високої частоти f , модульованого по частоті сигналом низької частоти, що модулює F. Приймальна антена 2 приймає луна-сигнали літака і ракети і прямий сигнал антени, що передає. Приймач 6 посилює ці сигнали, перетворює їх на проміжну частоту і детектує, а на виході амплітудного детектора приймача виділяються низькочастотні сигнали на низьких різницевих частотах луна-сигналів цілей і прямого сигналу передавача. Ці сигнали являють собою частотно-модульовані сигнали на несучих доплерівських частотах FДЦ і FД2. Фільтри 9, 10 перетворять ці частотно-модульовані сигнали в амплітудно-модульовані сигнали на несучих частотах Доплера FДЦ і FД2. Амплітудні обмежувачі 15, 16 обмежують амплітудну модуляцію і виділяють сигнали на частотах Доплера FДЦ і FД2, які вимірюють вимірювачами частоти 17, 18. Амплітудні детектори 11, 12 детектують амплітудно-модульовані сигнали на несучих частотах Доплера FДЦ і FД2 і виділяють з них майже синусоїдальні сигнали на частоті, що модулює F. Фазовимірювачі 13, 14 вимірюють зсуви фаз φ1, φ2. цих сигналів щодо сигналу передавача, що модулює. Обчислювач 19 обчислює радіальні швидкості Vрц, Vpp і дальності rц, rр літака і ракети за результатами вимірів FДЦ, FД2 і φ1, φ2 за допомогою співвідношень (2-5). Таким чином, запропонований пристрій вирішує поставлену задачу, усуває відзначені хиби прототипу і забезпечує одночасний вимір дальностей і радіальних швидкостей літака і ракети, що наводиться на нього, за допомогою радіолокатора з безупинним сигналом. Джерела інформації: 1. Педак A. M., Баклашов П. И. и др. Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. - М.: Военное издательство, 1967. - С. 23, 24, рис. 1.13 (прототип). 5 40129 Фіг. 1 6 40129 Фіг. 2 Фіг. 3 Фіг. 4 7 40129 Фіг. 5 Фіг. 6 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 8
ДивитисяДодаткова інформація
Назва патенту англійськоюRadio-locator with an analogue signal
Автори англійськоюPoroshyn Serhiy Mykhailovych, Bakhvalov Valentyn Borysovych
Назва патенту російськоюРадиолокатор с беспрерывным сигналом
Автори російськоюПорошин Сергей Михайлович, Бахвалов Валентин Борисович
МПК / Мітки
МПК: G01S 13/00
Мітки: безупинним, сигналом, радіолокатор
Код посилання
<a href="https://ua.patents.su/8-40129-radiolokator-iz-bezupinnim-signalom.html" target="_blank" rel="follow" title="База патентів України">Радіолокатор із безупинним сигналом</a>
Радіолокатор з несинусоідальним імпульсним сигналом
Номер патенту: 17462
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: імпульсним, сигналом, радіолокатор, несинусоідальним
Формула / Реферат:
Радиолокатор с несинусоидальным импульсным сигналом, содержащий приемо-передающую антенну с антенным переключателем, передатчик периодических несинусоидальных импульсных сигналов, синхронизатор, индикатор и приемник с широкополосным усилителем, гетеродином и смесителем, отличающийся тем, что смеситель выполнен по мостовой схеме из четырех высокочастотных широкополосных диодов с квадратичной вольт-амперной характеристикой, на выходе смесителя...
Радіолокатор кругового огляду
Номер патенту: 32196
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: кругового, огляду, радіолокатор
Текст:
...діаграма спрямування передавальної антени в горизонтальній площині. До складу запропонованого пристрою на фіг. 1 входять такі основні елементи: перший приймальний вібратор 1, що приймає луна-сигнали цілей з передньої напівсфери; другий приймальний вібратор 2, який приймає луна-сигнали цілей з задньої напівсфери; плоский металевий рефлектор 3 приймальної антени; перший 4 і другий 5 приймачі, пов'язані відповідно з першим і другим вібраторами...
Дуплексна радіолінія зв’язку з цифровим сигналом
Номер патенту: 33145
Опубліковано: 15.02.2001
Автори: Костенко Леонід Васильович, Бахвалов Борис Миколайович
МПК: H04B 7/00
Мітки: цифровим, зв'язку, дуплексна, радіолінія, сигналом
Текст:
...посилок однакової тривалості х, при цьому біту " 1" відповідає прямокутний радіоімпульс тривалості х на несучій частоті f, а біту "0" віповідає відсутність сигналу протягом такого ж інтервалу часу. При передачі біта " 1" вхід прймача запирають і він не приймає сигнали свого передавача. Повідомлення з другого кінця радіолінії на перший також передають посилками тривалості х синхронно з сигналом з першого кінця радіолінії. При цьому біти "...
Двокоординатний імпульсний радіолокатор
Номер патенту: 32200
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: імпульсний, радіолокатор, двокоординатний
Текст:
...антену у вигляді вібраторної антени типу «хвильовий» канал з нерухомим активним симетричним напівхвильовим вібратором і обертальними по азимуту директорами і рефлектором. Це дозволяє виконати фідерну лінію у вигляді нерухомої коаксиальної фідерної лінії, що пов'язує активний вібратор антени з антенним перемикачем, і виключити з цієї лінії обертальне зчленування. Відсутність обертального зчленування дозволяє збільшити пікову потужність...
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Бахвалов Валентин Борисович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: завад, пристроєм, відніманням, компенсації, радіолокатор
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...
Попередній патент: Вузол прикріплення плівки покрівлі теплиці до ванти
Наступний патент: Радіолокатор беззупинного випромінювання
Випадковий патент: Спосіб підвищення виводимості яєць перепелів