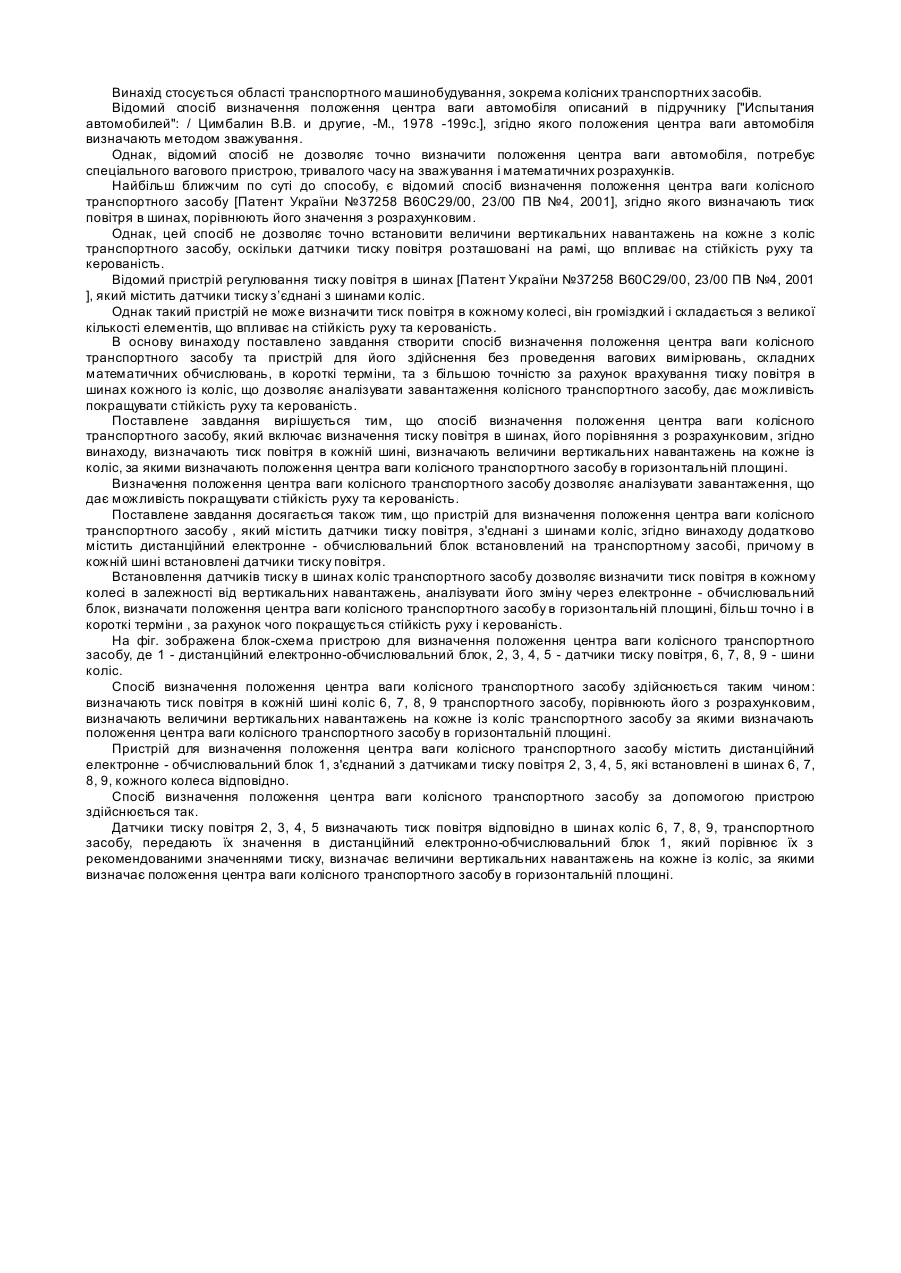
Спосіб автоматичного водіння колісного безрейкового транспортного засобу
Номер патенту: 46387
Опубліковано: 25.12.2009
Автори: Мельник Роман Васильович, Баранов Георгій Леонідович, Цулая Анатолій Важевич

Формула / Реферат
1. Спосіб автоматичного водіння колісного безрейкового транспортного засобу, що включає рух колісного безрейкового транспортного засобу, який з'єднаний з причіпним агрегатом та оснащений системою автоводіння, котра керує виконавчим механізмом здійснення повороту напрямних коліс за заданим напрямком, а також бортовий обчислювальний пристрій, який приймає сигнали від навігаційного прийомоіндикатора глобальної навігаційної супутникової системи, вхід якого поєднано з приймальною антеною, який відрізняється тим, що додатково створюють агротехнологічну електронну карту задання та базовий файл, за допомогою електронного формувача, який накопичує значення параметрів місцеположення на полі опорних та також еталонних точок, а після отримання команди на вибір конкретного задання параметрів обмежень згідно з технологічною смугою руху, точно визначають у робочій пам'яті обчислювача кожну планову траєкторію руху транспортного засобу вздовж чергового гону, а також кожну траєкторію розвороту згідно з кривою переходу від кінця попереднього гону на наступний черговий гін.
2. Спосіб за п. 1, який відрізняється тим, що записують за допомогою формувача координатної сітки поля накопичені у цьому файлі параметри разом з базовим значенням відстані антен у робочу пам'ять обчислювального пристрою, де параметри цих точок визначені у двох системах координат, а геодезичну систему використовує навігаційний прийомоіндикатор, яку записують у пам'ять місцевої електронної карти.
3. Спосіб за п. 1, який відрізняється тим, що фіксують рухому спрямовуючу лінію, яка однозначно визначає у просторі вісь орієнтації транспортного засобу та поєднує дві рознесені таким чином точки жорсткого закріплення центрів двох приймальних антен, відстань між якими точно виміряють та запам'ятовують у базовому файлі і пам'яті обчислювача при фіксуванні цієї базової рухомої лінії.
4. Спосіб за п. 1, який відрізняється тим, що на полі, яке обробляють, оцінюють вплив похибок послідовного вимірювання значень параметрів координатно-часового місцеположення антен на точність оцінки межі габаритної смуги даних безрейкового транспортного засобу, що у цьому часовому інтервалі не рухається, а знаходиться у точці.
5. Спосіб за п. 1, який відрізняється тим, що використовують блок адаптивної синхронізації у часі паралельних інтервальних процесів, значення тривалості яких залежить від планової швидкості руху безрейкового транспортного засобу по полю, а також від покрокового вводу даних, які отримують від приймальних антен, що приймають навігаційні сигнали GPS.
6. Спосіб за п. 1, який відрізняється тим, що зчитують обчислювачем значення параметрів місцеположення наступних опорних та еталонних точок електронної карти, яка у єдиній місцевій відносній системі відліку XOY згідно з параметрами поточного гону та значеннями швидкості руху безрейкового транспортного засобу, згідно з новими навігаційними визначеннями та прийомоіндикатора і за допомогою перетворювача перераховують вхідні значення у геодезичній системі координат у вихідні значення у місцевій відносній системі координат XOY.
7. Спосіб за п. 1, який відрізняється тим, що виконують поточне покрокове порівняння точності співпадіння місцеположення точок закріплення центрів двох приймальних антен, що рухаються, зі значеннями відповідних їм програмних розрахункових точок, для чого формують сигнал якості руху безрейкового транспортного засобу, значення якого дорівнює значенню фактичного тангенса кута спрямовуючої лінії, і при необхідності корегують роботу регулятора разом з виконавчим механізмом здійснення повороту напрямних коліс безрейкового транспортного засобу.
8. Спосіб за п. 1, який відрізняється тим, що приймають рішення на контрольованому часовому інтервалі щодо належності сформованого сигналу якості руху безрейкового транспортного засобу, одному з можливих двох класів, якщо даний сигнал належить до першого класу, тоді обчислювач переводять до наступного кроку функціонування згідно з блоком синхронізації обчислювача, у протилежному випадку, коли сигнал якості руху безрейкового транспортного засобу належить другому класу, формують додатковий сигнал неузгодженості.
9. Спосіб за п. 1, який відрізняється тим, що ініціалізують процес формування адаптивного коригуючого сигналу керування за формулою:
![]()
де γk - характеристика поточного кута орієнтації під час руху;
![]() - максимальна кількість кроків заміни коригуючого сигналу керування щоб асимптотично повернутись в перший клас стабільного прямолінійного руху у межах на заданому гоні поля;
- максимальна кількість кроків заміни коригуючого сигналу керування щоб асимптотично повернутись в перший клас стабільного прямолінійного руху у межах на заданому гоні поля;
lа = const =xА2(0)-xА1(k) - проекція на горизонтальну вісь ОХ відстані між антенами при їх виставленні в базовій точці;
∆хk= xА2(k)-xА1(k) - проекція на горизонтальну вісь ОХ відстані між антенами під час руху по гонах;
∆хk - різниця у k-тому кроці роботи обчислювача за результатами перерахунку визначень прийомоіндикатора у місцеву систему координат XOY стосовно значення xАі (k) поточних проекцій місцеположення відповідно антен (А1) та (А2) на горизонтальну вісь поля;
![]() (3)
(3)
β - характеристика базового кута орієнтації, яка визначається відношенням між двома проекціями прямої;
Ygf, Xgf - координати точки кінця гону на ортогональну вісь OY до горизонтальної осі OX;
Ygs, Xgs - координати точки початку гону на ортогональну вісь OY до горизонтальної осі OX;
g - позначення одного конкретного гону на полі;
G - кількість всіх гонів на конкретному полі, для якого відповідний курс руху безрейкового транспортного засобу, що визначає агроном під час створення агротехнологічної електронної карти задання.
Текст
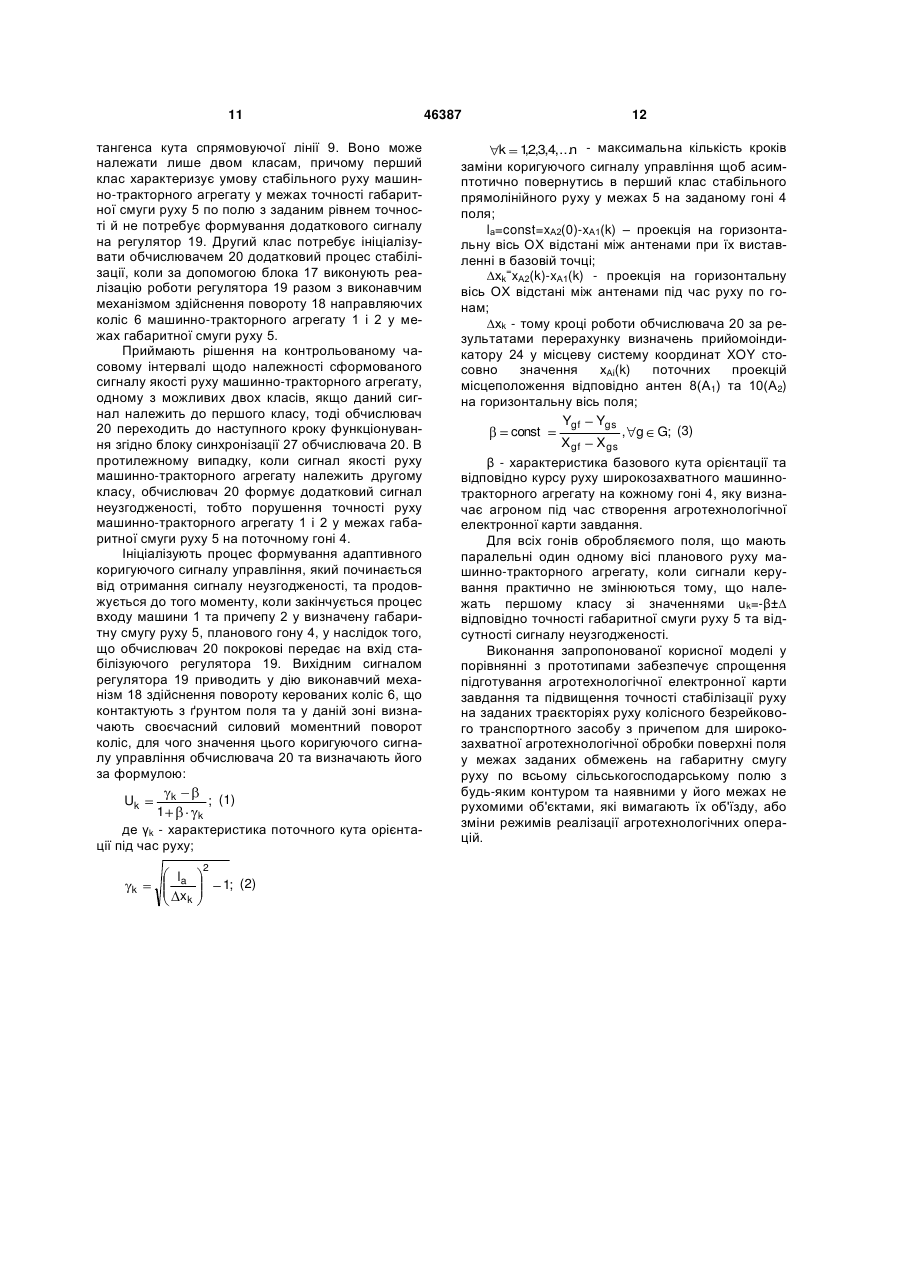
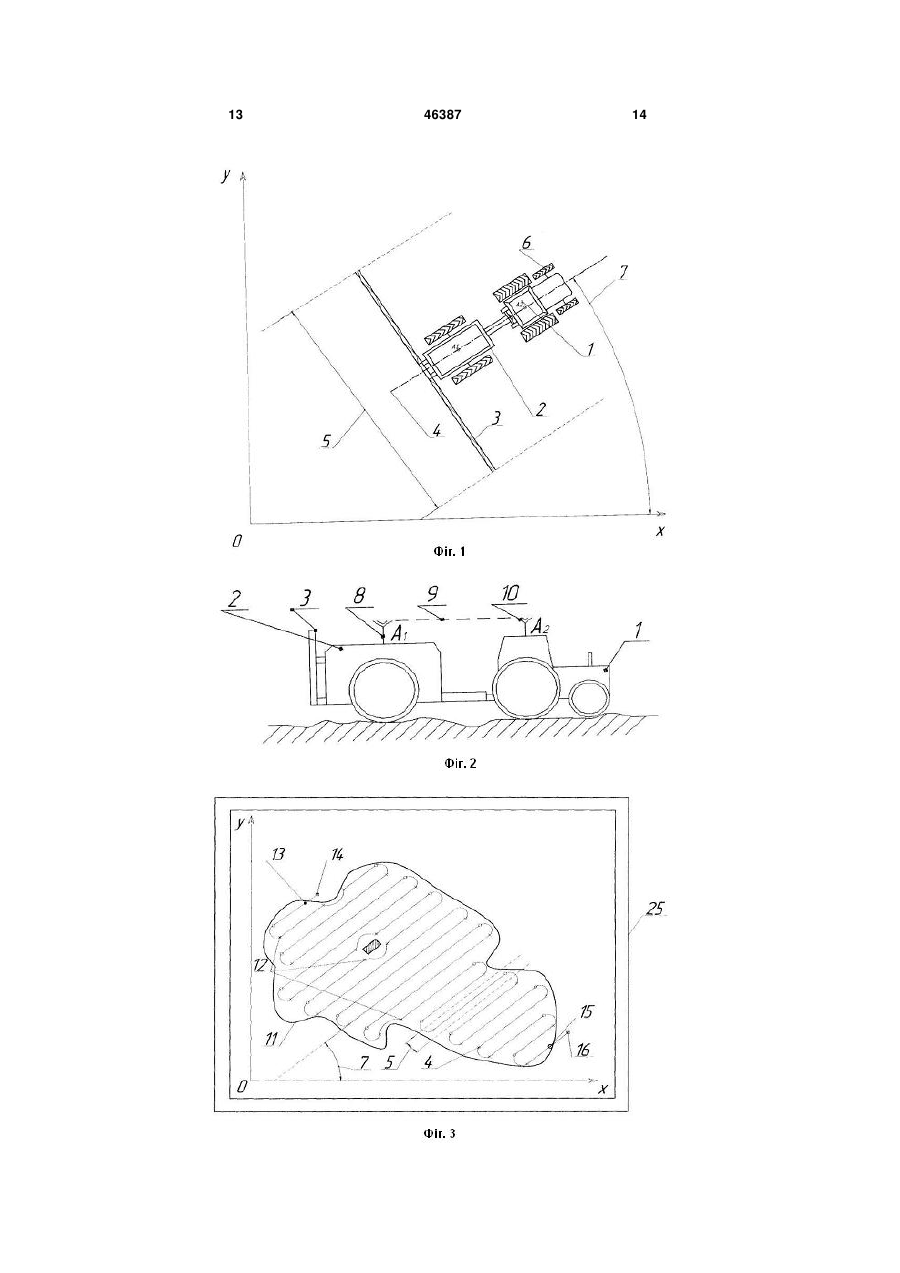
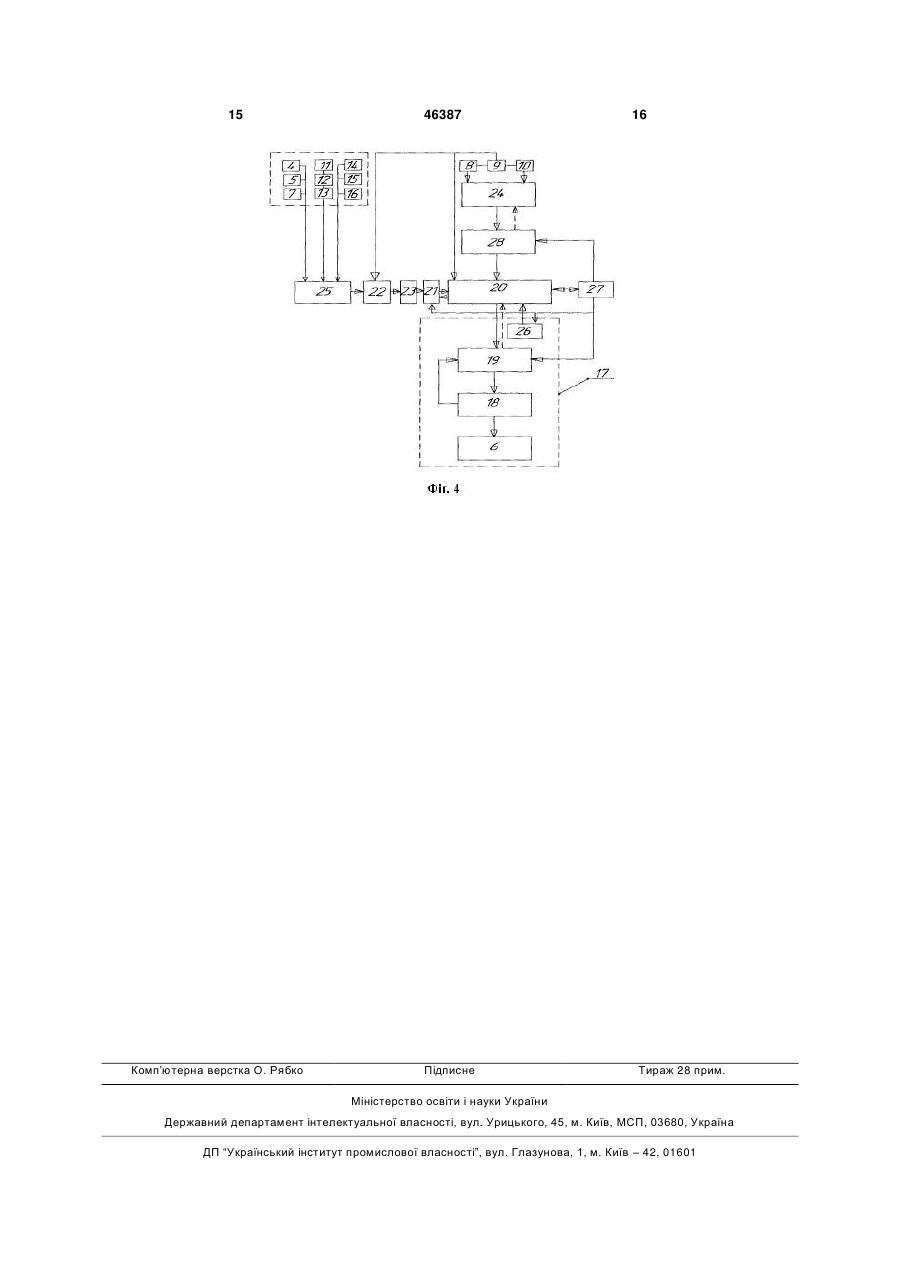
1. Спосіб автоматичного водіння колісного безрейкового транспортного засобу, що включає рух колісного безрейкового транспортного засобу, який з'єднаний з причіпним агрегатом та оснащений системою автоводіння, котра керує виконавчим механізмом здійснення повороту напрямних коліс за заданим напрямком, а також бортовий обчислювальний пристрій, який приймає сигнали від навігаційного прийомоіндикатора глобальної навігаційної супутникової системи, вхід якого поєднано з приймальною антеною, який відрізняється тим, що додатково створюють агротехнологічну електронну карту задання та базовий файл, за допомогою електронного формувача, який накопичує значення параметрів місцеположення на полі опорних та також еталонних точок, а після отримання команди на вибір конкретного задання параметрів обмежень згідно з технологічною смугою руху, точно визначають у робочій пам'яті обчислювача кожну планову траєкторію руху транспортного засобу вздовж чергового гону, а також кожну траєкторію розвороту згідно з кривою переходу від кінця попереднього гону на наступний черговий гін. 2. Спосіб за п. 1, який відрізняється тим, що записують за допомогою формувача координатної сітки поля накопичені у цьому файлі параметри разом з базовим значенням відстані антен у робочу пам'ять обчислювального пристрою, де параметри цих точок визначені у двох системах координат, а геодезичну систему використовує навігаційний прийомоіндикатор, яку записують у пам'ять місцевої електронної карти. 3. Спосіб за п. 1, який відрізняється тим, що фіксують рухому спрямовуючу лінію, яка однозначно визначає у просторі вісь орієнтації транспортного 2 (19) 1 3 інтервалі щодо належності сформованого сигналу якості руху безрейкового транспортного засобу, одному з можливих двох класів, якщо даний сигнал належить до першого класу, тоді обчислювач переводять до наступного кроку функціонування згідно з блоком синхронізації обчислювача, у протилежному випадку, коли сигнал якості руху безрейкового транспортного засобу належить другому класу, формують додатковий сигнал неузгодженості. 9. Спосіб за п. 1, який відрізняється тим, що ініціалізують процес формування адаптивного коригуючого сигналу керування за формулою: Uk k , 1 k де γk - характеристика поточного кута орієнтації під час руху; k la xk 2 1, , n k 1 2,3, 4,... - максимальна кількість кроків заміни коригуючого сигналу керування щоб асимптотично повернутись в перший клас стабільного прямолінійного руху у межах на заданому гоні поля; Корисна модель відношення до автоматичного керування рухом колісного безрейкового транспортного засобу, зокрема для виконання планових агротехнологічних операцій, що необхідні при вирощуванні польових сільськогосподарських культур. Відомий спосіб автоматичного водіння колісним безрейковим транспортним засобом за заданим напрямком руху сільськогосподарського призначення в якому вимірюють кутову швидкість повороту керованих коліс і швидкості поступального руху трактора та формування управляючого впливу на керовані колеса пропорційно відношенню: L sin 2 ; Vy 2 max b2 1 cos 2 де: L - база транспорту; ω - кутова швидкість повороту керованих коліс трактора; Vy - швидкість поступального руху трактора; - кут в горизонтальній площині між повздовжніми осями трактора і одноосного причепа; εmax - максимальний кут повороту у фазі руху машинно-тракторного агрегату з постійним радіусом кривої; b - відстань від осі шарніра причепа до осі його коліс і задніх коліс трактора. (див. патент №28364 UA, A01B69/00, 59/04, бюлетень №5 16.10.2000) Недоліком відомого способу автоматичного водіння за заданим напрямком руху транспортного засобу є складність у реалізації, що потребує ви 46387 4 lа=const=xА2(0)-xА1(k) - проекція на горизонтальну вісь ОХ відстані між антенами при їх виставленні в базовій точці; = ∆хk xА2(k)-xА1(k) - проекція на горизонтальну вісь ОХ відстані між антенами під час руху по гонах; ∆хk - різниця у k-тому кроці роботи обчислювача за результатами перерахунку визначень прийомоіндикатора у місцеву систему координат XOY стосовно значення xАі(k) поточних проекцій місцеположення відповідно антен (А1) та (А2) на горизонтальну вісь поля; Ygf Ygs const , g G, (3) Xgf Xgs β - характеристика базового кута орієнтації, яка визначається відношенням між двома проекціями прямої; Ygf, Xgf - координати точки кінця гону на ортогональну вісь OY до горизонтальної осі OX; Ygs, Xgs - координати точки початку гону на ортогональну вісь OY до горизонтальної осі OX; g - позначення одного конкретного гону на полі; G - кількість всіх гонів на конкретному полі, для якого відповідний курс руху безрейкового транспортного засобу, що визначає агроном під час створення агротехнологічної електронної карти задання. користання кількох датчиків з високою точністю вимірів у польових умовах під час руху. Більш ефективний спосіб автоматичного водіння руху (див. патент №2192033 РФ, G05D1/02, 27.10.2002), транспортного засобу - це спосіб при якому у якості датчика відхилення напряму руху від заданого використовують прийомоіндикатор супутникової радіонавігаційної системи, наприклад: GPS, ГЛОНАСС, Galileo, який разом з датчиком кута повороту колеса відносно кузова через блок управління, що підключений до слідкуючого приводу руху за заданим напрямком та засобів змінити положення керованих коліс. Цей спосіб найбільш близький до запропонованого і тому прийнятий в якості прототипу. Принцип режиму роботи індикатора згідно заздалегідь заданої траєкторії руху відомий наприклад: див. Соловйов Ю.А. Системи супутникової навігації, М.: Эко-Трэнд, 2000, 267с; GPS-12, GPS-XI. Руковоцтво по эксплуатации, GARMIN, 1997, 62с; Agrocom, www.agroit.com.ua; Trimble, www.novo-farm.com.ua, www.agricon.de; Center Line 220, www.tiijet.com.ua. Недоліком прототипу є складність технологічної реалізації та недостатня точність стабілізації керування під час руху за заданим напрямком. Задачею корисної моделі є підвищення точності ведення за заданим напрямком колісного безрейкового транспортного засобу та за планом обробки заданої поверхні. Відповідно до корисної моделі, ця задача вирішується завдяки тому, що спосіб автоматичного водіння колісним безрейковим транспортним засобом при виконанні на полі агротехнологічних 5 операцій за планом обробки заданої поверхні, що включає колісний безрейковий транспортний засіб який з'єднаний з причіпним агрегатом та систему автоводіння яка керує виконавчим механізмом здійснення повороту направляючих коліс за заданим напрямком а також бортовий обчислювальний пристрій який приймає сигнали від навігаційного прийомоіндикатора глобальної навігаційної супутникової системи, що поєднаний з прийомною антеною, який відрізняється тим, що додатково створюють агротехнологічну електрону карту завдання та базовий файл, за допомогою електронного формувача, який накопичує значення параметрів місцеположення на полі опорних та також еталонних точок, що після отримання команди на вибір конкретного завдання параметрів обмежень згідно технологічної смуги руху точно визначають у робочій пам'яті обчислювача кожну планову траєкторію руху машинно-тракторного агрегату вздовж чергового гону, а також кожну траєкторію розвороту згідно кривої переходу від кінця попереднього гону на наступний черговий гін. Причому за допомогою формувача координатної сітки поля накопиченні у цьому файлі параметри разом з базовим значенням відстані антен та, записують у робочу пам'ять обчислювального пристрою, де параметри цих точок визначенні у двох системах координат, геодезичну систему використовує навігаційний прийомоіндикатор, а для виконання під час руху машинно-тракторного агрегату планових агротехнологічних операцій на полі, з фактично нерівною конфігурацією контурної лінії поверхні що обробляють, обчислювач у власній пам'яті використовує відносну місцеву електронну карту, горизонтальна вісь абсцис якої складає базовий кут орієнтації з всіма вісями паралельних гонів та відповідно планового курсу руху машини, починаючи з точки заїзду на поле для початку роботи та закінчуючи термінальною точкою виїзду з поля після завершення у точці запланованих у базовому файлі агротехнологічних операцій. Фіксують рухому спрямовуючу лінію, яка однозначно визначає у просторі вісь орієнтації машини разом з'єднаним з нею причепом та поєднує дві рознесенні таким чином точки жорсткого закріплення центрів двох приймальних антен, відстань між якими точно виміряють та запам'ятовують у базовому файлі і пам'яті обчислювача, при фіксуванні цієї базової рухомої лінії даного машиннотракторного агрегату, як неперервне продовження та поєднання повздовжніх осей даної машини та причіпного агрегату, при знаходженні обох на одній лінії. На полі, що обробляють оцінюють вплив похибок послідовного вимірювання значень параметрів координатно-часового місцеположення антен на точність оцінки межі габаритної смуги даних робочих органів агрегату, що у цьому часовому інтервалі не рухається та знаходиться у точці, а також виставлення лінії та гону за точками - до співпадіння їх під базовим кутом орієнтації гонів рухомої спрямовуючої лінії машини з курсовою віссю першого гону та паралельних йому наступних, яка визначається першими двома точками базового файлу, а саме параметрами координат еталонної 46387 6 точки заїзду на поле та еталонної, стартової для електронної карти точки першого гону агротехнологічного завдання, що реалізовують під час руху машини по полю з технологічною швидкістю виконання агрооперації у межах габаритної смуги руху вздовж напряму гону. Використання блоку синхронізації адаптивну синхронізацію у часі паралельних інтервальних процесів, значення тривалості яких залежить від планової швидкості руху машинно-тракторного агрегату по полю, а також від покрокового вводу даних, які отримують від приймальних антен, що приймають навігаційні сигнали GPS, які потім надають їх прийомоіндикатору, та від роботи пульта керування обчислювачем, процес роботи якого узгоджено з процесом розрахунку перетворювача координат і зчитування даних з базового файлу, а також з процесом своєчасної передачі коригуючого сигналу управління від обчислювача на регулятор, який при визначенні обчислювачем на контрольованому часовому інтервалі наявності сигналу неузгодженості, що виникає у наслідок відхилення кута спрямовуючої лінії від базового кута орієнтації гонів, визначає додатковий процес активної стабілізації шляхом дій виконавчої системи автоводіння, що зменшують поточну курсову різницю яка визначена розрахунком до меж допуску на точність і якість роботи регулятора, який отримує від обчислювача адаптивний коригуючий сигнал управління і таким чином разом з виконавчим механізмом здійснення повороту направляючих коліс та керованими колесами реалізують кроки процедури стабілізації руху машинно-тракторного агрегату та причепа вздовж кожної планової траєкторії гону реального сільськогосподарського поля, параметри якого визначені у базовому файлі та робочій пам'яті обчислювача. Зчитують обчислювачем значення параметрів місцеположення наступних опорних та еталонних точок електронної карти, яка у єдиній місцевій відносній системі відліку XOY згідно параметрів поточного гону та значення швидкості руху машиннотракторного агрегату згідно нових навігаційних визначень та прийомоіндикатору дозволяє за допомогою перетворювача перерахувати вхідні значення у геодезичній системі координат у вихідні значення в місцевій відносній системі координат XOY, щоб потім покрокові за допомогою формувача координатної сітки поля генерувати, як поточні сигнали фактичного місцеположення у часі та просторі кожної з двох приймальних антен, так і відповідні їм програмні розрахункові рухомі точки відображення планового місцеположення на електронній карті, яка відповідно відображає у робочій пам'яті задані у базовому файлі дані виходу блока у вигляді виходу блока у вигляді агротехнологічної координатної сітки для нерухомого сільськогосподарського поля та нерухомих необробляємих об'єктів на ньому, які обов'язково обминаємо за точками. Виконують поточне покрокове порівняння точності співпадіння місцеположення точок закріплення центрів двох приймальних антен, що рухаються, з значеннями відповідних їм програмних розрахункових точок, для чого формують сигнал 7 якості руху машинно-тракторного агрегату, значення якого дорівнює значенню фактичного тангенса кута спрямовуючої лінії, яке може належати лише двом класам, причому перший клас характеризує умову стабільного руху машиннотракторного агрегату у межах точності габаритної смуги руху по полю з заданим рівнем точності й не потребує формування додаткового сигналу на регулятор, а другий клас потребує ініціалізувати обчислювачем додатковий процес стабілізації, коли за допомогою блока виконують реалізацію роботи регулятора разом з виконавчим механізмом здійснення повороту направляючих коліс машинно-тракторного агрегату у межах габаритної смуги руху. Приймають рішення на контрольованому часовому інтервалі щодо належності сформованого сигналу якості руху машинно-тракторного агрегату, одному з можливих двох класів, якщо даний сигнал належить до першого класу, тоді обчислювач переходить до наступного кроку функціонування згідно блоку синхронізації обчислювача, у протилежному випадку, коли сигнал якості руху машинно-тракторного агрегату належить другому класу, обчислювач формує додатковий сигнал неузгодженості, тобто порушення точності руху машинно-тракторного агрегату у межах габаритної смуги руху на поточному гоні. Ініціалізують процес формування адаптивного коригуючого сигналу управління за формулою: k ; (1) 1 k де γk - характеристика поточного кута орієнтації під час руху; Uk k la xk 2 1; (2) k 12,3,4,...n - максимальна кількість кроків , заміни коригуючого сигналу управління щоб асимптотично повернутись в перший клас стабільного прямолінійного руху у межах на заданому гоні поля; lа=const=xА2(0)-xА1(k) – проекція на горизонтальну вісь ОХ відстані між антенами при їх виставленні в базовій точці; = ∆хk xА2(k)-xА1(k) - проекція на горизонтальну вісь ОХ відстані між антенами під час руху по гонам; ∆хk - різниця у k-тому кроці роботи обчислювача за результатами перерахунку визначень прийомоіндикатору у місцеву систему координат XOY стосовно значення хАі(k) поточних проекцій місцеположення відповідно антен (А1) та (А2) на горизонтальну вісь поля; Ygf Ygs const , g G; (3) X gf X gs β - характеристика базового кута орієнтації та відповідно курсу руху широкозахватного машиннотракторного агрегату на кожному гоні, яку визначає агроном під час створення агротехнологічної електронної карти завдання. Для всіх гонів обробляємого поля, що мають паралельні один одному вісі планового руху ма 46387 8 шинно-тракторного агрегату, коли сигнали керування практично не змінюються тому, що належать першому класу зі значеннями uk=-β±∆ відповідно точності габаритної смуги руху та відсутності сигналу неузгодженості. Процес ініціалізації починається від отримання сигналу неузгодженості, та продовжується до того моменту, коли закінчується процес входу машини та причепу у визначену габаритну смугу руху, планового гону, у наслідок того, що обчислювач покрокові передає на вхід стабілізуючого регулятора, який вихідним сигналом регулятора приводить у дію виконавчий механізм здійснення повороту керованих коліс, що контактують з ґрунтом поля та у даній зоні визначають своєчасний силовий моментний поворот коліс. Приклади виконання корисної моделі, що більш докладно описані нижче, зображені на даних кресленнях, на яких: - Фіг.1. схематично представлена вісь напрямку руху машинно-тракторного агрегату. - Фіг.2. схематично представлений вид збоку машинно-тракторного агрегату, з розміщенням двох приймальних антен сигналів супутникової радіонавігаційної системи. - Фіг.3. схематично відображена карта сільськогосподарського поля з будь-яким контуром поверхні, що обробляється. - Фіг.4. представлена блок-схема системи автоматичного водіння колісним безрейковим транспортним засобом. Спосіб водіння на полі сільськогосподарського призначення напрямом руху самохідної колісної машини у вигляді колісного безрейкового транспортного засобу 1 для виконання планових агротехнологічних операцій за допомогою системи автоматичного водіння 17, що містить самохідну колісну машину 1 з причіпним агрегатом 2, які разом формують машинно-тракторний агрегат, керовані колеса 6, виконавчий механізм здійснення повороту направляючих коліс 18, регулятор 19 на роботу якого впливає агротехнологічна електронна карта координатної сітки поля 22, бортовий обчислювальний пристрій 20 та навігаційний прийомоіндикатор 24 сигналів глобальної навігаційної супутникової системи, наприклад GPS, вхід якого поєднано з прийомною антеною 8, який відрізняється тим , що додатково: Створюють агротехнологічну електрону карту завдання 25 та базовий файл 23, за допомогою електронного формувача 22 який накопичує значення параметрів місцеположення на полі опорних 12 та також еталонних точок 13, 14, 15, 16. Після отримання команди на вибір конкретного завдання параметрів обмежень згідно технологічної смуги руху 5 точно визначають у робочій пам'яті 21 обчислювача 20 кожну планову траєкторію руху машинно-тракторного агрегату вздовж чергового гону 4, а також кожну траєкторію розвороту 12 згідно кривої переходу від кінця попереднього гону на наступний черговий гін. За допомогою формувача координатної сітки поля 22 накопиченні у цьому файлі 23 параметри разом з базовим значенням відстані антен 8 та 10, записують у робочу пам'ять 21 обчислювального пристрою 20, де параметри 9 цих точок точно визначенні у двох системах координат, геодезичну систему використовує навігаційний прийомоіндикатор 24, а для виконання під час руху машинно-тракторного агрегату планових агротехнологічних операцій на полі, з фактично нерівною конфігурацією контурної лінії 11 поверхні що обробляють. Обчислювач 20 у власній пам'яті використовує відносну місцеву електронну карту 25, горизонтальна вісь абсцис якої складає базовий кут орієнтації 7 з всіма вісями паралельних гонів 4 та відповідно планового курсу 7 руху машини 1, починаючи з точки заїзду на поле 14 для початку роботи та закінчуючи термінальною точкою 16 виїзду з поля після завершення у точці 15 запланованих у базовому файлі 23 агротехнологічних операцій. Приклад відображення агротехнологічної електронної карти завдання 25 на екрані монітора формувача координатної сітки поля 22 з будь-якою конфігурацією контурної лінії 11, що обмежує поверхню, яка обробляється за допомогою машиннотракторного агрегату з обмежувальною технологічною смугою руху 5та робочими органами причіпного широкозахватного агрегату З надано на Фіг.1 та 3. Фіксують рухому спрямовуючу лінію 9, яка однозначно визначає у просторі вісь орієнтації машини 1 разом з'єднаним з нею причепом 2 та поєднує дві рознесенні таким чином точки жорсткого закріплення центрів двох приймальних антен 8 та 10. Відстань між якими точно виміряють та запам'ятовують у базовому файлі 23 і пам'яті 21 обчислювача 20, при фіксуванні цієї базової рухомої лінії даного машинно-тракторного агрегату, як неперервне продовження та поєднання повздовжніх осей даної машини 1 та причіпного агрегату 2, при знаходженні обох на одній лінії. Спрямовуюча лінія 9 показана на Фіг.1, у плані прямолінійного руху вздовж заданого гону та на Фіг.2, за тих же умов коли відстань між антенами А1 та А2 або центрами їх жорсткого кріплення на конструкції дорівнює lа, що точно вимірюють. На полі, що обробляють оцінюють вплив похибок послідовного вимірювання значень параметрів координатно-часового місцеположення антен 8 і 10 на точність оцінки межі габаритної смуги 5 даних робочих органів агрегату 3, що у цьому часовому інтервалі не рухається та знаходиться у точці 14. Також виставлення лінії 9 для точок 8 і 10 та гону за точками 13 і 14 до співпадіння їх під базовим кутом орієнтації гонів 7 рухомої спрямовуючої лінії 9 машини з курсовою віссю 4 першого гону та паралельних йому наступних, яка визначається першими двома точками 13 і 14 базового файлу 23. Параметрами координат еталонної точки заїзду на поле 14 та еталонної, стартової для електронної карти 25 точки першого гону 13 агротехнологічного завдання, що реалізовують під час руху машини 1 по полю з технологічною швидкістю виконання агрооперації у межах габаритної смуги руху 5 вздовж напряму гону 4. Виставлення початкових умов для стабільного руху з початкової стартової точки першого гону 13, що сусідня з точкою заїзду на поле 14, пояснюють Фіг.1, 2, 3, які також характеризують сутність базо 46387 10 вого кута орієнтації 7 напряму руху вздовж вісі планового поточного гону 4. Використання блоку синхронізації 27 адаптивну синхронізацію у часі паралельних інтервальних процесів, значення тривалості яких залежить від планової швидкості руху трактора 1 з причіпним агрегатом 2 по полю. Від покрокового вводу даних, які отримують від приймальних антен 8 і 10, що приймають навігаційні сигнали GPS, які потім надають їх прийомоіндикатору 24, та від роботи пульта керування 26 обчислювачем 20, процес роботи якого узгоджено з процесом розрахунку перетворювача координат 28 і зчитування даних з базового файлу 23, а також з процесом своєчасної передачі коригуючого сигналу управління від обчислювача 20 на регулятор 19, який при визначенні обчислювачем 20 на контрольованому часовому інтервалі наявності сигналу неузгодженості. Він виникає у наслідок відхилення кута спрямовуючої лінії 9 від базового кута орієнтації гонів 7, визначає додатковий процес активної стабілізації шляхом дій виконавчої системи автоводіння 17, що зменшують поточну курсову різницю яка визначена розрахунком до меж допуску на точність і якість роботи регулятора 19, який отримує від обчислювача 20 адаптивний коригуючий сигнал управління і таким чином разом з виконавчим механізмом здійснення повороту направляючих коліс 18 та керованими колесами 6 реалізують кроки процедури стабілізації руху машини 1 та причепа 2 вздовж кожної планової траєкторії гону 4 реального сільськогосподарського поля, параметри якого визначені у базовому файлі 23 та робочій пам'яті 21 обчислювача 20. Зчитують обчислювачем 20 значення параметрів місцеположення наступних опорних та еталонних точок електронної карти 25, яка у єдиній місцевій відносній системі відліку XOY згідно параметрів поточного гону 4 та значення швидкості руху машинно-тракторного агрегату згідно нових навігаційних визначень 8 та 10 прийомоіндикатору 24 дозволяє за допомогою перетворювача 28 перерахувати вхідні значення у геодезичній системі координат у вихідні їх відповідні значення у місцевій відносній системі координат XOY. Потім покрокові за допомогою формувача координатної сітки поля 22 генерувати, як поточні сигнали фактичного місцеположення у часі та просторі кожної з двох приймальних антен 8 і 10, так і відповідні ним програмні розрахункові рухомі точки відображення планового місцеположення А1 і А2 на електронній карті 25, яка відповідно відображає у робочій пам'яті 21 задані у базовому файлі 23 дані виходу блока 22 у вигляді виходу блока 22 у вигляді агротехнологічної координатної сітки для нерухомого сільськогосподарського поля та нерухомих необробляємих об'єктів на ньому, які обов'язково обминаємо за точками 12. Виконують поточне покрокове порівняння точності співпадіння місцеположення точок закріплення центрів двох приймальних антен 8 і 10, що рухаються, з значеннями відповідних ним програмних розрахункових точок, для чого формують сигнал якості руху машинно-тракторного агрегату, значення якого дорівнює значенню фактичного 11 тангенса кута спрямовуючої лінії 9. Воно може належати лише двом класам, причому перший клас характеризує умову стабільного руху машинно-тракторного агрегату у межах точності габаритної смуги руху 5 по полю з заданим рівнем точності й не потребує формування додаткового сигналу на регулятор 19. Другий клас потребує ініціалізувати обчислювачем 20 додатковий процес стабілізації, коли за допомогою блока 17 виконують реалізацію роботи регулятора 19 разом з виконавчим механізмом здійснення повороту 18 направляючих коліс 6 машинно-тракторного агрегату 1 і 2 у межах габаритної смуги руху 5. Приймають рішення на контрольованому часовому інтервалі щодо належності сформованого сигналу якості руху машинно-тракторного агрегату, одному з можливих двох класів, якщо даний сигнал належить до першого класу, тоді обчислювач 20 переходить до наступного кроку функціонування згідно блоку синхронізації 27 обчислювача 20. В протилежному випадку, коли сигнал якості руху машинно-тракторного агрегату належить другому класу, обчислювач 20 формує додатковий сигнал неузгодженості, тобто порушення точності руху машинно-тракторного агрегату 1 і 2 у межах габаритної смуги руху 5 на поточному гоні 4. Ініціалізують процес формування адаптивного коригуючого сигналу управління, який починається від отримання сигналу неузгодженості, та продовжується до того моменту, коли закінчується процес входу машини 1 та причепу 2 у визначену габаритну смугу руху 5, планового гону 4, у наслідок того, що обчислювач 20 покрокові передає на вхід стабілізуючого регулятора 19. Вихідним сигналом регулятора 19 приводить у дію виконавчий механізм 18 здійснення повороту керованих коліс 6, що контактують з ґрунтом поля та у даній зоні визначають своєчасний силовий моментний поворот коліс, для чого значення цього коригуючого сигналу управління обчислювача 20 та визначають його за формулою: k ; (1) 1 k де γk - характеристика поточного кута орієнтації під час руху; Uk k la xk 2 1; (2) 46387 12 k 12,3,4,...n - максимальна кількість кроків , заміни коригуючого сигналу управління щоб асимптотично повернутись в перший клас стабільного прямолінійного руху у межах 5 на заданому гоні 4 поля; lа=const=xА2(0)-xА1(k) – проекція на горизонтальну вісь ОХ відстані між антенами при їх виставленні в базовій точці; = ∆хk xА2(k)-xА1(k) - проекція на горизонтальну вісь ОХ відстані між антенами під час руху по гонам; ∆хk - тому кроці роботи обчислювача 20 за результатами перерахунку визначень прийомоіндикатору 24 у місцеву систему координат XOY стосовно значення xАі(k) поточних проекцій місцеположення відповідно антен 8(А1) та 10(А2) на горизонтальну вісь поля; Ygf Ygs const , g G; (3) X gf X gs β - характеристика базового кута орієнтації та відповідно курсу руху широкозахватного машиннотракторного агрегату на кожному гоні 4, яку визначає агроном під час створення агротехнологічної електронної карти завдання. Для всіх гонів обробляємого поля, що мають паралельні один одному вісі планового руху машинно-тракторного агрегату, коли сигнали керування практично не змінюються тому, що належать першому класу зі значеннями uk=-β±∆ відповідно точності габаритної смуги руху 5 та відсутності сигналу неузгодженості. Виконання запропонованої корисної моделі у порівнянні з прототипами забезпечує спрощення підготування агротехнологічної електронної карти завдання та підвищення точності стабілізації руху на заданих траєкторіях руху колісного безрейкового транспортного засобу з причепом для широкозахватної агротехнологічної обробки поверхні поля у межах заданих обмежень на габаритну смугу руху по всьому сільськогосподарському полю з будь-яким контуром та наявними у його межах не рухомими об'єктами, які вимагають їх об'їзду, або зміни режимів реалізації агротехнологічних операцій. 13 46387 14 15 Комп’ютерна верстка О. Рябко 46387 Підписне 16 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic driving of a wheeled railless means of transport
Автори англійськоюMelnyk Roman Vasyliovych, Baranov Heorhii Leonidovych, Tsulaia Anatolii Vazhevych
Назва патенту російськоюСпособ автоматического вождения колесного безрельсового транспортного средства
Автори російськоюМельник Роман Васильевич, Баранов Георгий Леонидович, Цулая Анатолий Важевич
МПК / Мітки
МПК: G05D 1/02, A01B 69/00
Мітки: автоматичного, колісного, транспортного, безрейкового, засобу, водіння, спосіб
Код посилання
<a href="https://ua.patents.su/8-46387-sposib-avtomatichnogo-vodinnya-kolisnogo-bezrejjkovogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного водіння колісного безрейкового транспортного засобу</a>
Спосіб визначення положення центра ваги колісного транспортного засобу і пристрій для його здійснення
Номер патенту: 69620
Опубліковано: 15.09.2004
Автори: Козлинський Мирослав Петрович, Плешкановський Олег Валентинович, Мальнов Сергій Іванович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: визначення, ваги, засобу, центра, пристрій, колісного, здійснення, спосіб, положення, транспортного
Формула / Реферат:
1. Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в шинах, його порівняння з розрахунковим, який відрізняється тим, що визначають тиск повітря в кожній шині коліс, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають положення центра ваги колісного транспортного засобу в горизонтальній площині.2. Пристрій для визначення положення центра ваги...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
Опубліковано: 15.01.2007
Автори: Козлинський Мирослав Петрович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: засобу, ваги, спосіб, вертикальний, положення, здійснення, транспортного, пристрій, колісного, центра, площині, визначення
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...
Спосіб визначення величини нахилу колісного транспортного засобу в повздовжній площині
Номер патенту: 42365
Опубліковано: 25.06.2009
Автори: Шпак Олег Орестович, Сорва Олександр Андрійович, Свідерок Сергій Миколайович, Козлинський Мирослав Петрович, Жила Сергій Петрович
МПК: F41H 7/00, B60C 23/00
Мітки: транспортного, визначення, колісного, нахилу, засобу, величини, повздовжній, спосіб, площині
Формула / Реферат:
Спосіб визначення величини нахилу колісного транспортного засобу в повздовжній площині, що включає вимірювання кута нахилу транспортного засобу, який відрізняється тим, що вимірюють тиск повітря в шинах переднього і заднього мостів, порівнюють його з розрахунковим, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають величину нахилу колісного транспортного засобу в повздовжній площині.
Спосіб визначення величини нахилу колісного транспортного засобу в поперечній площині
Номер патенту: 42367
Опубліковано: 25.06.2009
Автори: Жила Сергій Петрович, Калінін Олександр Марковійович, Юнда Валерій Анатолійович, Слюсаренко Олександр Іванович, Козлинський Мирослав Петрович, Чорний Микола Васильович
МПК: B60C 23/00, F41H 7/00
Мітки: поперечний, площині, величини, колісного, нахилу, спосіб, визначення, транспортного, засобу
Формула / Реферат:
Спосіб визначення величини нахилу колісного транспортного засобу в поперечній площині, що включає вимірювання кута нахилу транспортного засобу, який відрізняється тим, що вимірюють тиск повітря в шинах правої і лівої сторін, порівнюють його з розрахунковим, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають величину нахилу колісного транспортного засобу в поперечній площині.
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині
Номер патенту: 19059
Опубліковано: 15.12.2006
Автори: Козлинський Мирослав Петрович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: площині, положення, ваги, центра, визначення, транспортного, вертикальний, спосіб, засобу, колісного
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при криволінійному русі транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне з коліс, за якими визначають положення центра ваги колісного...
Попередній патент: Магнітний вловлювач для фільтруючих пристроїв
Наступний патент: Спосіб приготування остеогенного трансплантату
Випадковий патент: Тент