Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 57534
Опубліковано: 16.06.2003
Автори: Копитко Ігор Йосипович, Вдовіченко Наталія Євгенівна, Саричев Юрій Олексійович, Федоров Володимир Іванович, Рогов Петро Дмитрович, Якорнов Євгеній Аркадійович
Формула / Реферат
1. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радіомодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком, вихід якого є першим входом радіомодема, а на вхід датчика надходять сигнали від штучних супутників землі глобальної супутникової системи, центральний пункт у складі робочої станції, яка складається з каскадно з'єднаних радіомодема, на перший і другий входи якого через лінії зв'язку надходять сигнали від першого супроводжуваного рухомого об'єкта, і пристрою обробки, вхід якого є виходом радіомодема і індикатора, вхід якого є виходом пристрою обробки, яка відрізняється тим, що в неї додатково введені другий супроводжуючий рухомий об'єкт, що супроводжує перший і що містить каскадно з'єднані радіомодем, на перший вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик, на вхід якого надходять сигнали від штучних супутників землі глобальної супутникової системи, а другий вихід є другим входом радіомодема, та індикатор взаємного положення обох рухомих об'єктів, другий вхід якого з'єднаний з виходом радіомодема, а перший вхід є першим виходом датчика, і виявник, вихід якого з'єднаний з третім входом індикатора взаємного положення, у перший супроводжуваний рухомий об'єкт введені радіомаяк, через вихід якого випромінюються сигнали тривоги, і виконавчий пристрій з 2-N-виходами, вхід якого є виходом радіомодема, а перший вихід є входом радіомаяка, в центральний пункт введено блок управління, вхід якого з'єднаний з другим виходом пристрою обробки, а вихід є третім входом радіомодема робочої станції.
2. Система по п. 1, яка відрізняється тим, що виявник другого супроводжуючого рухомого об'єкта містить лінійну антенну решітку із чотирма виходами, чотири підсилювачі високої частоти, входи яких з'єднані відповідно з виходами лінійної антенної решітки, два подільники потужності, входи яких з'єднані з виходами другого і третього підсилювачів високої частоти відповідно, два фазометри, перші входи яких з'єднані відповідно з виходами першого і четвертого підсилювачів високої частоти, а другі - відповідно з першими виходами подільників потужності, фазовий дискримінатор, перший і другий входи якого з'єднані відповідно з другими виходами подільників потужності, і мікропроцесор, перший і третій входи якого з'єднані відповідно з виходами фазометрів, а другий вхід є виходом фазового дискримінатора, що також з'єднаний з лінійною антенною решіткою по входу, причому вихід мікропроцесора є виходом виявника.
Текст
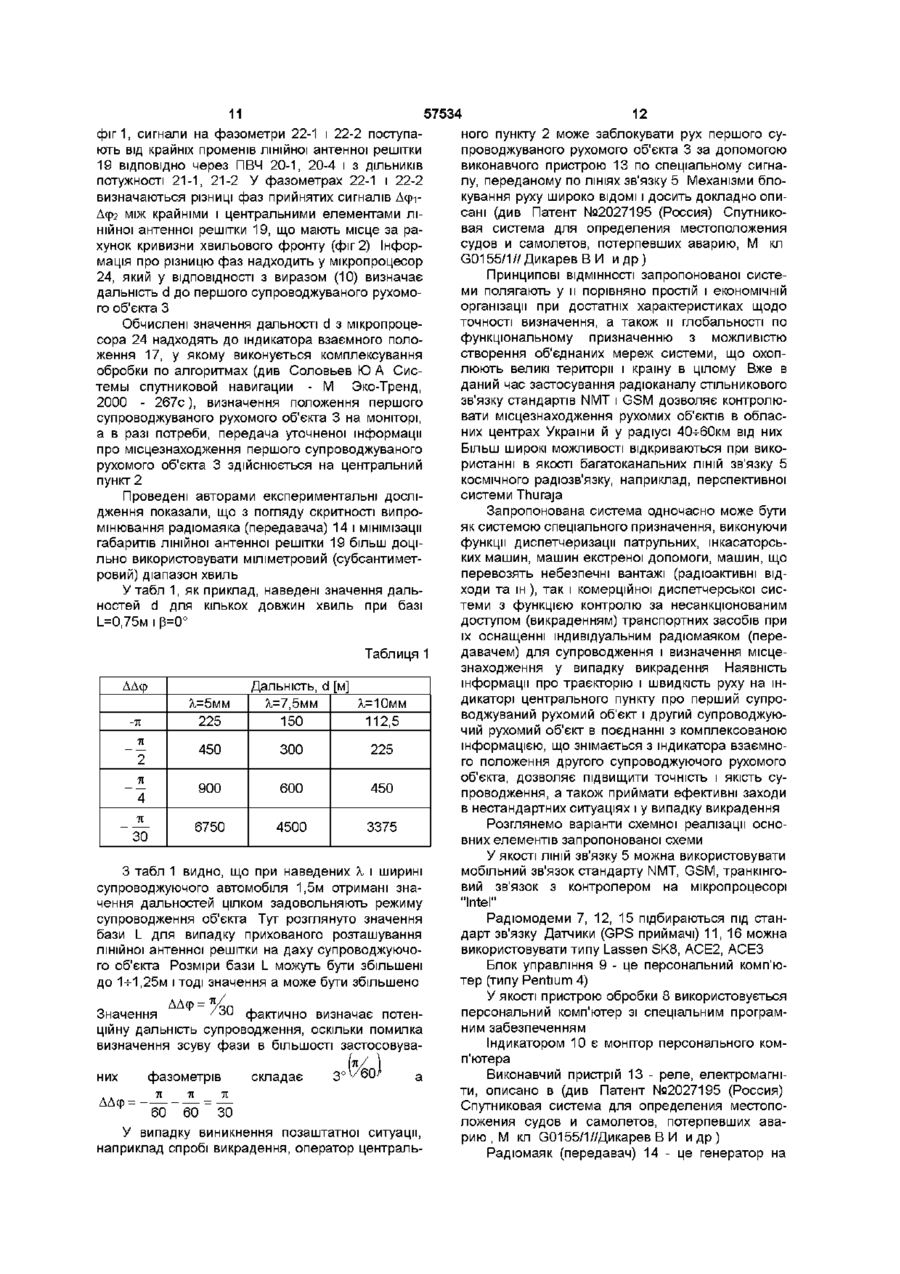
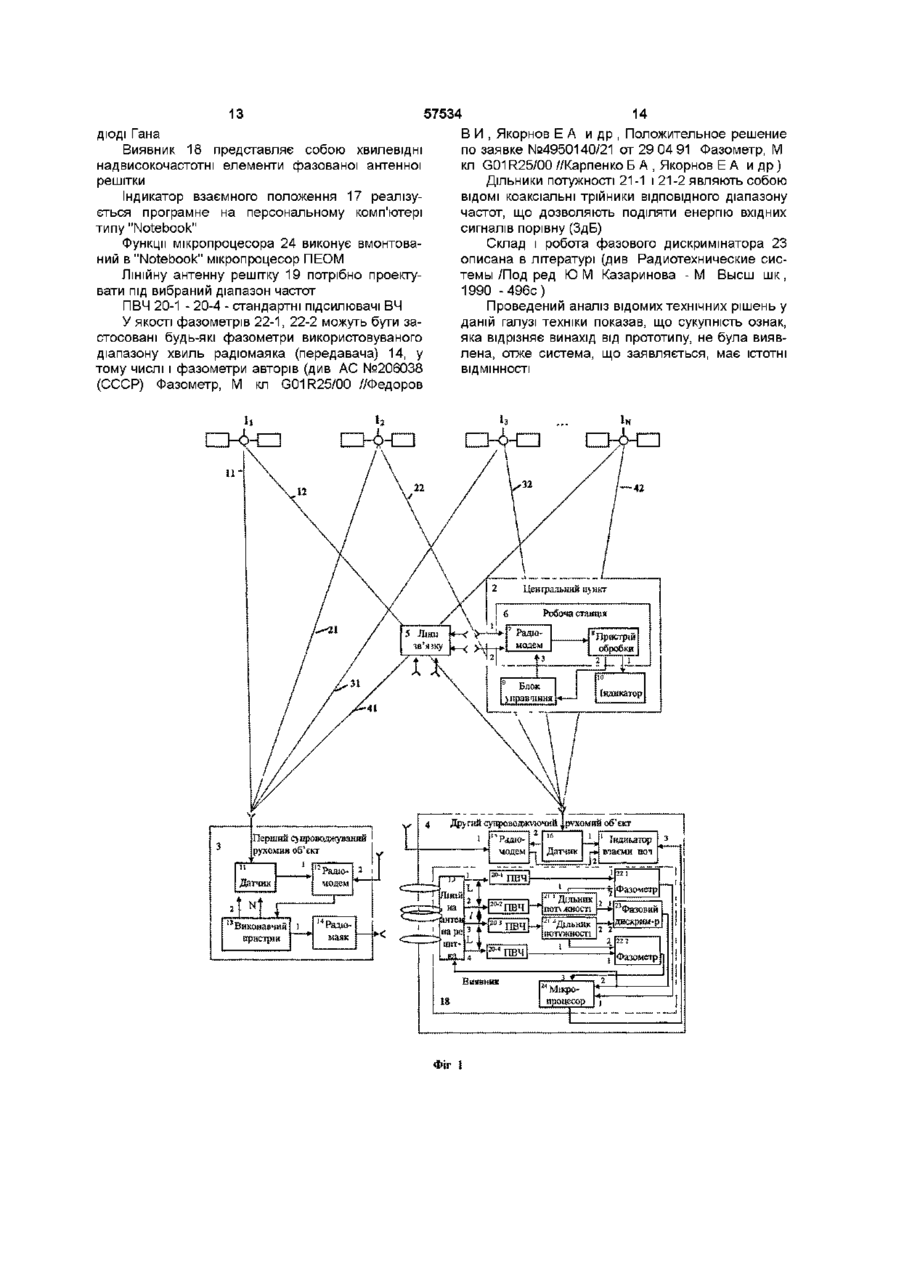
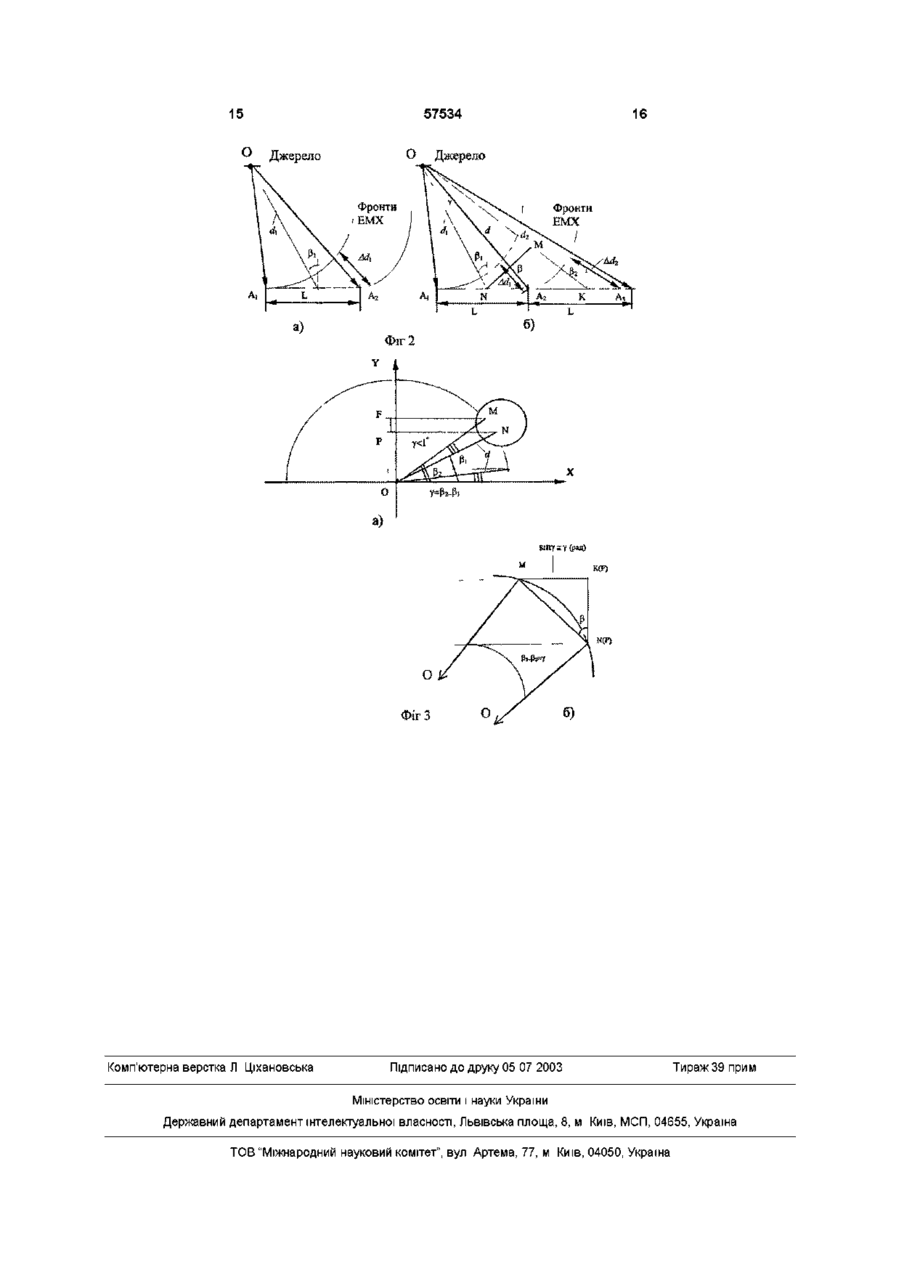
1 Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радюмодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком, вихід якого є першим входом радюмодема, а на вхід датчика надходять сигнали від штучних супутників землі глобальної супутникової системи, центральний пункт у складі робочої станції, яка складається з каскадно з'єднаних радюмодема, на перший і другий входи якого через лінії зв'язку надходять сигнали від першого супроводжуваного рухомого об'єкта, і пристрою обробки, вхід якого є виходом радюмодема і індикатора, вхід якого є виходом пристрою обробки, яка відрізняється тим, що в неї додатково введені другий супроводжуючий рухомий об'єкт, що супроводжує перший і що містить каскадно з'єднані радюмодем, на перший вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик, на вхід якого надходять сигнали від штучних супутників землі глобальної супутникової системи, а другий вихід є другим Винахід відноситься до радіотехніки, зокрема до систем диспетчеризації рухомих об'єктів, що використовують глобальну супутникову систему радіонавігації, і може бути застосований для контролю пересування і супроводження інкасаторських входом радюмодема, та індикатор взаємного положення обох рухомих об'єктів, другий вхід якого з'єднаний з виходом радюмодема, а перший вхід є першим виходом датчика, і виявник, вихід якого з'єднаний з третім входом індикатора взаємного положення, у перший супроводжуваний рухомий об'єкт введені радіомаяк, через вихід якого випромінюються сигнали тривоги, і виконавчий пристрій з 2-І\І-виходами, вхід якого є виходом радюмодема, а перший вихід є входом радіомаяка, в центральний пункт введено блок управління, вхід якого з'єднаний з другим виходом пристрою обробки, а вихід є третім входом радюмодема робочої станції 2 Система по п 1, яка відрізняється тим, що виявник другого супроводжуючого рухомого об'єкта містить лінійну антенну решітку із чотирма виходами, чотири підсилювачі високої частоти, входи яких з'єднані ВІДПОВІДНО З виходами лінійної антенної решітки, два подільники потужності, входи яких з'єднані з виходами другого і третього підсилювачів високої частоти ВІДПОВІДНО, два фазометри, перші входи яких з'єднані ВІДПОВІДНО З виходами першого і четвертого підсилювачів високої частоти, а другі - ВІДПОВІДНО з першими виходами ПОДІЛЬНИКІВ потужності, фазовий дискримінатор, перший і другий входи якого з'єднані ВІДПОВІДНО З другими виходами ПОДІЛЬНИКІВ потужності, і мікропроцесор, перший і третій входи якого з'єднані ВІДПОВІДНО з виходами фазометрів, а другий вхід є виходом фазового дискримінатора, що також з'єднаний з ЛІНІЙНОЮ антенною решіткою по входу, причому вихід мікропроцесора є виходом виявника і патрульних машин, машин екстреної допомоги та інших рухомих об'єктів спеціального призначення, для дистанційного виявлення несанкціонованого доступу, викрадення службових і приватних транспортних засобів СО Ю Ю 57534 Відома система для визначення місцезнаходження рухомих об'єктів, зокрема, транспортних засобів, що використовує глобальну навігаційну систему, яка складається з h, b, Із, , IN GPSсупутників на полярних орбітах, сигнали яких за допомогою встановленого на рухомому об'єкті GPS-приймача дозволяють визначити координати його миттєвого місцезнаходження (див заявка РСТ №93/09446, М кл G01S5/14, 5/00, 1993) Для підвищення точності визначення координат рухомого об'єкта у ВІДОМІЙ системі впроваджений, принаймні, ще один опорний GPS-приймач, координати місцезнаходження якого точно ВІДОМІ Основним недоліком відомої системи є те, що вартість апаратури формування диференційних поправок на основі даних опорного GPS-приймача на кілька порядків вища вартості самого GPSприймача Відома система супроводження об'єктів, що використовує сигнали штучних супутників землі (ШСЗ) глобальної супутникової системи радіонавігації, яка, на відміну від попередньої системи, дозволяє визначати місцезнаходження кількох рухомих об'єктів завдяки періодичному стробуванню сигналів GPS-приймачів у заданому часовому ВІКНІ І наявності пристрою обробки, що знаходиться в центральному пункті, причому швидкість передачі даних на пристрій обробки по каналу передачі нижча швидкості стробування сигналів GPSприймача (див заявка ЕПВ №0545636, М кл G01S5/00, 5/14, 1994) Основним недоліком відомої системи є невисока точність визначення місцезнаходження супроводжуваних об'єктів через використання опорного GPS-приймача Найбільш близькою по технічній суті до запропонованої системи є система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації (див заявка ЕПВ №0512789, М кл G01S5/14, 5/00, 1993) Відома система супроводження рухомих об'єктів, обрана в якості прототипу, містить центральний пункт у складі GPS-приймача, робочої станції, яка складається з каскадно з'єднаних радюмодема, на перший і другий входи якого через лінії зв'язку надходять сигнали від супроводжуваного рухомого об'єкту, пристрою обробки, вхід якого є виходом радюмодема і індикатора, вхід якого є виходом пристрою обробки, супроводжуваного рухомого об'єкту у складі радюмодему, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчика (GPSприймача), вихід якого є першим входом радюмодема, а на вхід датчика (GPS-приймача) надходять сигнали від штучних супутників Землі глобальної супутникової системи, що знаходиться в полі зору датчика (GPS-приймача) Основними недоліками прототипу є по-перше, недостатня точність і надійність супроводження, зв'язана з екрануванням сигналів з супутників в районах міських будівель і на різко пересіченій місцевості, по-друге, наявність опорного GPSприймача і зв'язане з цим істотне подорожчання центрального пункту, що в результаті позначається на збільшенні собівартості послуг по супроводженню рухомих об'єктів, по-третє, у системі не передбачені технічні рішення, зв'язані з дистанційним виявленням несанкціонованого доступу (викрадення) транспортних засобів, що обслуговуються, і визначенням їх місцезнаходження в системі відкритої сигналізації після несанкціонованого доступу, оскільки командні сигнали, що поступають від центрального пункту, призначені тільки для управління датчиком (GPS-приймачем) Задачею, на рішення якої спрямований винахід, є створення більш дешевої системи визначення місцезнаходження й ідентифікації рухомого об'єкту, обладнаного датчиком на основі GPSприймача, шляхом введення другого супроводжуючого рухомого об'єкта, що містить також датчик (GPS-приймач) і зв'язок з центральним пунктом, який дозволяє на центральному пункті не мати опорний GPS-приймач і зв'язану з ним дорогу апаратуру диференційних поправок і в той же час забезпечити помилку відносного визначення місцезнаходження супроводжуваного об'єкта не більше 5м, що, зокрема, досягається наявністю виявника, який дублює процес супроводження у випадку часткового або повного екранування сигналів від ШСЗ (місто, гірська місцевість, яри й ш ) і дозволяє підвищити точність визначення місцезнаходження при комплексуванні обробки інформації, виявлення першого супроводжуваного рухомого об'єкта у випадку його викрадення по випромінюванню радіомаяка (передавача) і блокування руху з центрального пункту Поставлена задача вирішується тим, що в систему для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радюмодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком (GPSприймачем), вихід якого є першим входом радюмодема, а на вхід датчика (GPS-приймача) надходять сигнали від ШСЗ глобальної супутникової системи, які потрапляють у ширококутову діаграму спрямованості його антени, центральний пункт у складі робочої станції, яка складається з каскадно з'єднаних радюмодема, на перший і другий входи якого через лінії зв'язку надходять сигнали від першого супроводжуваного рухомого об'єкта, пристрою обробки, вхід якого є виходом радюмодема і індикатора, вхід якого є виходом пристрою обробки, введені другий супроводжуючий рухомий об'єкт, що супроводжує перший і що містить каскадно з'єднані радюмодем, на перший вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS-приймач), на вхід якого надходять сигнали від ШСЗ глобальної супутникової системи, а другий вихід є другим входом радюмодема та індикатор взаємного положення, другий вхід якого з'єднаний із виходом радюмодема, а перший вхід є першим виходом датчика (GPSприймача) і виявник, вихід якого з'єднаний з третім входом індикатора взаємного положення, у перший супроводжуваний рухомий об'єкт введені радіомаяк (передавач), через вихід якого випромінюються сигнали тривоги, і виконавчий пристрій з 2-N - виходами, вхід якого є виходом радюмодема, а перший вихід є входом радіомаяка (передавача), в центральний пункт - блок управління, вхід якого 57534 з'єднаний з другим виходом пристрою обробки, а вихід є третім входом радюмодема робочої станції Виявник другого супроводжуючого рухомого об'єкта містить лінійну антенну решітку з чотирма виходами, чотири підсилювачі високої частоти (ПВЧ), входи яких з'єднані ВІДПОВІДНО З виходами лінійної антенної решітки, два дільники потужності, входи яких з'єднані з виходами другого і третього ПВЧ ВІДПОВІДНО, два фазометри, перші входи яких з'єднані ВІДПОВІДНО з виходами першого і четвертого ПВЧ, а другі ВІДПОВІДНО з першими виходами ДІЛЬНИКІВ потужності, фазовий дискримінатор, перший і другий входи якого з'єднані ВІДПОВІДНО З другими виходами ДІЛЬНИКІВ потужності, і мікропроцесор, перший і третій входи якого з'єднані ВІДПОВІДНО з виходами фазометрів, а другий є виходом фазового дискримінатора, що також з'єднаний з ЛІНІЙНОЮ антенною решіткою по входу, причому вихід мікропроцесора є виходом виявника Порівняльний аналіз з прототипом показує, що запропонована система відрізняється наявністю другого супроводжуючого рухомого об'єкта, нових блоків і нових зв'язків МІЖ введеними об'єктом й іншими блоками в структурних елементах системи У зв'язку з цим запропонована система відповідає критерію винаходу «новизна» На фіг 1 наведена структурна схема системи для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, на фіг 2 - різниці ходів сигналів сферичних фронтів електромагнітних хвиль для двох і трьох приймальних антен, а на фіг 3 пояснюється виведення нового інформаційного параметра, однозначно зв'язаного з дальністю до точкового джерела радіовипромінювання Підвищення точності й оперативності визначення місцезнаходження першого супроводжуваного рухомого об'єкта в заявленій системі забезпечується за рахунок другого супроводжуючого рухомого об'єкта, що супроводжує перший і який має аналогічну апаратуру з першим, шляхом зіставлення інформації на індикаторі взаємного положення про координати місцезнаходження другого супроводжуючого рухомого об'єкта і координати першого супроводжуваного рухомого об'єкта, одержуваних через ЛІНІЮ зв'язку з центрального пункту системи Крім того, наявність у другому супроводжуючому рухомому об'єкті виявника координат першого супроводжуваного рухомого об'єкта по сигналах його радіомаяка (передавача) дозволяє здійснювати супроводження у випадку тимчасової відсутності одного або кількох сигналів від ШСЗ, а при їх наявності - комплексувати обробку інформації від двох незалежних джерел, що також призводить до підвищення точності визначення координат першого супроводжуваного рухомого об'єкта А оскільки радіомаяк (передавач) має свій ідентифікаційний номер і працює від незалежного джерела живлення, то це дозволяє оперативно організувати пошук транспортного засобу у випадку його викрадення і перебування в несприятливих для пошуку умовах (металеві гаражі, трейлери, залізобетонні укриття та ш) У системі також передбачено блокування руху першого супроводжуваного рухомого об'єкта у випадку неадекватного поводження і спроб його захоплення і викрадення Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації (фиг 1) містить N штучних супутників Землі h - IN (не менше 4-х) глобальної супутникової системи радіонавігації, центральний пункт 2, перший супроводжуваний рухомий об'єкт З, другий супроводжуючий рухомий об'єкт 4, що супроводжує перший, і лінії зв'язку 5, які з'єднують ці об'єкти з центральним пунктом 2 Центральний пункт 2 складається з робочої станції 6, що містить радюмодем 7, на перший і другий входи якого через лінії зв'язку 5 надходять сигнали від першого супроводжуваного 3 та другого супроводжуючого 4 рухомих об'єктів, і пристрій обробки 8, вхід якого є виходом радюмодема 7, блока управління 9, вхід якого з'єднаний з другим виходом пристрою обробки 8, а вихід є третім входом радюмодема 7 робочої станції 6, і індикатора 10, вхід якого є першим виходом пристрою обробки 8 Перший супроводжуваний рухомий об'єкт 3 містить датчик (GPSприймач) 11, на вхід якого надходять сигнали від ШСЗ h - IN глобальної супутникової системи, радюмодем 12, перший вхід якого є виходом датчика (GPS-приймача) 11, а на другий його вхід через лінії зв'язку 8 надходять сигнали з центрального пункту 2, виконавчий пристрій з 2-N - виходами 13, вхід якого є виходом радюмодема 12 і радіомаяк (передавач) 14, вхід якого є першим виходом виконавчого пристрою 13, а через його вихідвипромінюється радіосигнал, а в позаштатній ситуації, й індивідуальний код об'єкта Другий супроводжуючий рухомий об'єкт 4 містить радюмодем 15, на перший вхід якого через лінії зв'язку 5 надходять сигнали з центрального пункту 2, датчик (GPSприймач) 16, на вхід якого надходять сигнали від ШСЗ h - IN глобальної супутникової системи, а другий вихід є другим входом радюмодема 15, індикатор взаємного положення 17, другий вхід якого з'єднаний із виходом радюмодема 15, а перший вхід є першим виходом датчика (GPS-приймача) 16 і виявник 18, вихід якого з'єднаний з третім входом індикатора взаємного положення 17, що складається з лінійної антенної решітки 19 із чотирма виходами, чотирьох підсилювачів високої частоти 20-1 - 20-4, входи яких з'єднані ВІДПОВІДНО З виходами лінійної антенної решітки 19, двох ДІЛЬНИКІВ потужності 21-1 і 21-2, входи яких з'єднані з виходами другого 20-2 і третього 20-3 ПВЧ ВІДПОВІДНО, двох фазометрів 22-1 і 22-2, перші входи яких з'єднані ВІДПОВІДНО з виходами першого 20-1 і четвертого 20-4 ПВЧ, а другі ВІДПОВІДНО З першими виходами ДІЛЬНИКІВ потужності 21-1 і 21-2, фазового дискримінатора 23, перший і другий входи якого з'єднані ВІДПОВІДНО з другими виходами ДІЛЬНИКІВ потужності 21-1 і 21-2 і мікропроцесора 24, перший і третій входи якого з'єднані ВІДПОВІДНО З виходами фазометрів 22-1 і 22-2, а другий вхід є виходом фазового дискримінатора 23, що також з'єднаний з ЛІНІЙНОЮ антенною решіткою 19 по входу, причому вихід мікропроцесора 24 є виходом виявника 18 Роботу системи розглянемо на прикладі, коли вона містить 4 ШСЗ h-Ц Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації (наприклад, «Navstar») працює таким чином Система визначає місцезнаходження першого супро 57534 воджуваного рухомого об'єкта 3, використовуючи сигнали від ШСЗ h-Ц Основні принципи визначення координат за допомогою супутникових радіонавігаційних систем досить широко висвітлені в науково-технічній літературі (див Сетевые спутниковые радионавигационные системы /Под ред В С Шебшаевича 2-е изд - М Радио и связь, 1993 408с , Гофман-Веленгоф Б , Колшз Д Глобальна система визначення місцеположення (GPS) Теорія та практика Пер з англ Під ред Я Ц Яцніна - К Наук думка, 1996 - 387с, Соловьев ЮА Системы спутниковой навигации - М Эко-Тренд, 2000 267с) Для цього в першому супроводжуваному рухомому об'єкті 3 установлений датчик (GPSприймач) 11, що по сигналах не менш ніж із чотирьох супутників h-Ц визначає своє місцезнаходження і з заданою дискретністю за допомогою радюмодема 12 першого супроводжуваного рухомого об'єкта 3 і радюмодема 7 центрального пункту 2 передає через лінії зв'язку 5 свої координати на центральний пункт 2, де вони аналізуються в пристрої обробки 8 робочої станції 6 і відображаються на індикаторі 10 оператора, а в разі потреби і запам'ятовуються Точність визначення горизонтальної координати складає 5-10м, але у ряді випадків вона являється недостатньою, особливо при супроводженні цінних і небезпечних вантажів в умовах міста і гірської місцевості, коли відбувається часткове або повне екранування сигналів від ШСЗ h-Ц Тому для особливих випадків (супроводження, пошук) здійснюється спільна обробка інформації з другого супроводжуючого рухомого об'єкта 4, який визначає свої координати за допомогою датчика (GPS-приймача) 16 і зв'язаний з центральним пунктом 2 за допомогою радюмодема 15 другого супроводжуючого рухомого об'єкта 4, радюмодема 7 центрального пункту 2 і ЛІНІЙ зв'язку 5 Для цього його координати відображаються на індикаторі 10 робочої станції 6 і на індикаторі взаємного положення 17, на який з центрального пункту 2 поступають координати першого супроводжуваного рухомого об'єкта 3, що дозволяє визначити координати останнього з точністю менше 5 м Це обумовлено тим, що потенційна точність визначення координат може бути поліпшена шляхом створення і функціонування алгоритму оптимального послідовного оцінювання усіх вимірів групи з двох рухомих об'єктів (як локальних для кожного об'єкта окремо, так і взаємних між ними) У цьому випадку відбувається компенсація квазисистематичних погрішностей, що обумовлені помилками координатно-часового забезпечення навігаційних космічних сигналів від ШСЗ h-Ц, особливостями поширення радіохвиль в атмосфері Землі і селективним доступом Так, якщо в якості відносної системи координат узяти прямокутну х, у, z, початок якої збігається з другим супроводжуючим рухомим об'єктом 4 (вісь у направлена на ПІВНІЧ, Х - на схід, a z - вгору (координата для випадку гористої місцевості)), то ВІДНОСНІ координати першого супроводжуваного рухомого об'єкта 3 одержуються за допомогою співвідношень (див Соловьев ЮА Системы спутниковой навигации - М Эко-Тренд, 2000 267с) х6-х *67 У 67 Z67 = Уб"У7 z6-z 2 Z 67) 2 7 7 У 67 A 6 7 =arctg *67 2 "4> 7 . Уб7 Z67 Є 67 =arctg2 |Х 67 О), 2 У 67І2 де Хб7, Уб7, Z67 - різниця відносних координат, D67 - взаємна дальність між об'єктами, А37 - азимут, 067 - Кут МІСЦЯ, \\ij - курс другого супроводжуючого рухомого об'єкта Ці ВІДНОСНІ координати відображаються на ін дикаторі взаємного положення 17 Однак, введення такої обробки хоча і забезпечує підвищення точності визначення координат, але не вирішує цілком проблему супроводження в МІСЬКІЙ зоні і на різко пересіченій місцевості через екранування сигналів з супутників, яке має місце, а значить, і похибок у визначенні координат Крім того, при спробах захоплення першого супроводжуваного рухомого об'єкта 3 по датчиках (GPS-приймачах) 11,16 обох рухомих об'єктів можуть бути застосовані навмисні активні перешкоди, що можуть цілком нейтралізувати процес визначення свого місцезнаходження Тому для цих випадків у систему впроваджена додаткова автономна підсистема визначення дальності й азимуту, до складу якої входять радіомаяк (передавач) 14 у першому супроводжуваному рухомому об'єкті 3 і виявник 18, що знаходиться в другому супроводжуючому рухомому об'єкті 4 Ця підсистема може працювати й у звичайних (не екстремальних) умовах і шляхом комплексування обробки інформації підвищити точність визначення координат першого супроводжуваного рухомого об'єкта З Принцип дії зазначеної підсистеми полягає в наступному Радіомаяк (передавач) 14 вимірює кодовані сигнали, що знаходяться по енергетиці нижче рівня шумів і не створюють перешкод іншим радюзасобам Ці сигнали можуть нести індивідуальний код першого супроводжуваного рухомого об'єкта 3, що дуже важливо у випадку великої КІЛЬКОСТІ контрольованих транспортних засобів і при їхньому викраденні, оскільки ці сигнали можна запеленгувати і при знаходженні викрадених об'єктів у частково екранованих приміщеннях (гаражах, трейлерах і т д ) Причому, при установці радіомаяка (передавача) 14 на першому супроводжуваному рухомому об'єкті 3 потрібно передбачити комплекс заходів, що утрудняють його візуальне виявлення (приховане розташування апаратури, камуфляж антен під елементи конструкції об'єкта, автономне живлення та ш ) У випадку відсутності другого супроводжуючого рухомого об'єкта 4 пошук викрадених транспортних засобів по сигналах радіомаяка (передавача) 14 здійснюється відомими методами пеленгування джерела випромінювання При наявності другого супроводжуючого рухомого об'єкта 4 його виявник 18 у реальному масштабі часу видає на індикатор взаємного положення 17 пеленг на перший супроводжуваний рухомий об'єкт 3 і дальність до нього Ці дві коор 57534 динати в запропонованій системі добуваються зі сферичності хвильового фронту електромагнітних хвиль (ЕМХ), що випромінюються радіомаяком (передавачем) 14 3 фіг 2а видно, що чим ближче джерело випромінювання до точки спостереження, тим крутизна характеристики фронту ЕМХ більша, а чим далі - тим менша Отже, дальність і крутизна характеристики однозначно зв'язані і, якщо приймати сигнали передавача на дві прийомні антени А-і, Аг, то при незмінній базі L між антенами величина різниці ходу Adi (фіг 2а) буде залежати від дальності до джерела випромінювання Вимірювати Adi найпростіше фазовим методом Однак серйозним недоліком останнього являється неоднозначність фазових ВІДЛІКІВ, яка може бути усунена введенням третьої приймальної антени Аз (фіг 26) З введенням третьої приймальної антени Аз одержимо новий інформаційний параметр для системи з трьох приймальних антен, однозначно зв'язаний з дальністю а до джерела виміру Для цього візьмемо різницю між різницями ходів ЕМХ першої А-і, Аг і другої Аг, Аз антенних пар AAd = Ad2 - A d 1 Ця різниця набігів фаз між розглянутими антенними парами визначається виразом 2л (2), 2л Дф=Ф2~Фі і Дфг=Фз-ф2 - різниці фаз сигналів, X - довжина хвилі За умови, що L « d , кожному значенню Ad при ВІДОМІЙ базі L відповідає пеленг ЦІЛІ р, що відраховується від нормалі до центру бази (див Радиотехнические системы /Под ред Ю М Казаринова М Высш ш к , 1 9 9 0 - 4 9 6 с ) , (фіг 2) Ad, Р = a r c s m — L = arcsm 2TIL (3), Де і= 1, 2, З, Кожному значенню різниць фаз Дфі і Дфг відповідає сімейство гіпербол, КІЛЬКІСТЬ яких визначається — 3 фіг 26 видно, що для більших відноX d шень — кут у визначається виразом у = Р2 - P i = arcsm 2лГ -arcsm Дф-jA, 2тіІ_ (4), де Рі.Рг - пеленги на джерело випромінювання (по нормалі) з центрів двох баз У той час з фіг За видно, що кут у може бути виражений у вигляді у = Р2 - Рі = arcsm - arcsm| (5), Оскільки ДЛЯ більших дальностей у
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for tracking mobile objects by using signals of a satellite radionavigation system
Автори англійськоюFedorov Volodymyr Ivanovych, Yakornov Yevhenii Arkadiiovych, Rohov Petro Dmytrovych
Назва патенту російськоюСистема для сопровождения подвижных объектов с помощью сигналов спутниковой системы радионавигации
Автори російськоюФедоров Владимир Иванович, Якорнов Евгений Аркадиевич, Рогов Петр Дмитриевич
МПК / Мітки
МПК: G01S 5/14
Мітки: супроводження, радіонавігації, системі, сигналів, супутникової, об'єктів, використанням, глобальної, рухомих, система
Код посилання
<a href="https://ua.patents.su/8-57534-sistema-dlya-suprovodzhennya-rukhomikh-obehktiv-z-vikoristannyam-signaliv-globalno-suputnikovo-sistemi-radionavigaci.html" target="_blank" rel="follow" title="База патентів України">Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації</a>
Система та спосіб управління потужністю глобальної багатосупутникової системи
Номер патенту: 26214
Опубліковано: 19.07.1999
Автори: Бертіджер Барі Роберт, Петерсон Кеннет Мейнард, Леопольд Реймонд Джозеф
МПК: H04B 7/185
Мітки: управління, система, глобальної, системі, багатосупутникової, спосіб, потужністю
Формула / Реферат:
1, Система, управления мощностью глобальной многоспутниковой системы, в которой входящие в нее спутники образуют созвездие с пересекающимися орбитами, причем каждый спутник содержит множество антенн, проецирующих множество лепестков диаграмм направленности на земную поверхность, причем каждый лепесток имеет первую зону обслуживания на земной поверхности, или "ячейку", причем сумма ячеек для каждого спутника образует вторую зону...
Пристрій виявлення сигналів
Номер патенту: 37871
Опубліковано: 15.05.2003
Автори: Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Траілін Вячеслав Федорович, Немчин Олександр Федорович, Падалко Віктор Григорович, Лаврентьєв Володимир Миколайович, Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ
МПК: G01S 7/02
Мітки: пристрій, сигналів, виявлення
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Пристрій виявлення сигналів інформації
Номер патенту: 37871
Опубліковано: 15.05.2001
Автори: Каспирович Олександр Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, Падалко Віктор Григорович, Траілін Вячеслав Федорович, Мирошниченко Михайло Іванович, Немчин Олександр Федорович, Лаврентьєв Володимир Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 7/02
Мітки: сигналів, інформації, виявлення, пристрій
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Пристрій для виявлення рухомих об’єктів
Номер патенту: 2285
Опубліковано: 26.12.1994
Автори: Кондратик Володимир Васильович, Усик Іван Федорович
МПК: G01S 13/56
Мітки: виявлення, рухомих, об'єктів, пристрій
Формула / Реферат:
Устройство для обнаружения движущихся объектов, содержащее сверхвысокочастотный (СВЧ) излучатель-приемник, содержащий резонансную камеру с диодом Ганна и приемный СВЧ-элемент, выход которого через фильтр сигнала с частотой доплеровского сдвига соединен с входом усилителя переменного напряжения, пороговый блок, вход которого соединен с выходом фильтра переменного напряжений, выход порогового блока соединен с входом блока задержки, выход...
Комп’ютерна інформаційно-діагностична система компресорних станцій газопостачальної системи україни
Номер патенту: 50963
Опубліковано: 15.11.2002
Автори: Сопель Михайло Федорович, Стасюк Ілона Олександрівна, Ковзель Микола Олексійович, Демченко Микола Оксентійович, Стогній Борис Сергійович, Коломєєв Валентин Миколаєвич
МПК: G06F 15/18, G01D 4/00
Мітки: система, україни, станцій, системі, газопостачальної, комп'ютерна, компресорних, інформаційно-діагностична
Формула / Реферат:
1. Комп’ютерна інформаційно-діагностична система компресорних станцій газопостачальної системи України, що включає дешифратор, регістр, блок гальванічної розв'язки, яка відрізняється тим, що вона додатково доповнена центральним персональним комп’ютером, мікропроцесорними системами реєстрації та модемами, причому кожна мікропроцесорна система реєстрації включає мікропроцесор, дешифратор, блок гальванічної розв'язки, ключі, оперативний...
Попередній патент: Спосіб діагностики локальних і системних інфікованих ускладнень у хворих деструктивним панкреатитом
Наступний патент: Засіб для лікування шкіряних захворювань
Випадковий патент: Спосіб формування заряду гаряченаливної водонаповненої вибухової речовини в обводненій свердловині і водонаповнена вибухова речовина