Спосіб візуалізації атаки червоточини в безпровідній сенсорній мережі
Номер патенту: 64391
Опубліковано: 10.11.2011
Автори: Карпінський Володимир Миколайович, Карпінський Микола Петрович, Боровік Богдан Леонович, Євтух Петро Сильвестрович



Формула / Реферат
Спосіб візуалізації атаки червоточини в безпровідній сенсорній мережі, що полягає у вимірюванні відстані між сенсорами на підставі рівня потужності прийнятого сигналу, реконструюванні топологічної поверхні сенсорної мережі шляхом багатовимірного шкалювання, обчисленні віртуальної позиції кожного сенсора, згладжуванні реконструйованої топологічної поверхні сенсорної мережі, аналізі візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі та виявленні фальшивих з'єднань сусідніх сенсорів, зумовлених атакою червоточини, який відрізняється тим, що для вимірювання відстані між сенсорами використовують моделювання похибки вимірювання відстані між сенсорами змішаним шумом, що описується функціями Бесселя з уявним аргументом нульового та вищих порядків, для згладжування реконструйованої топологічної поверхні сенсорної мережі використовують тріангуляцію Делоне та кригінг-інтерполяцію, а для аналізу візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі використовують сітку трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі.
Текст
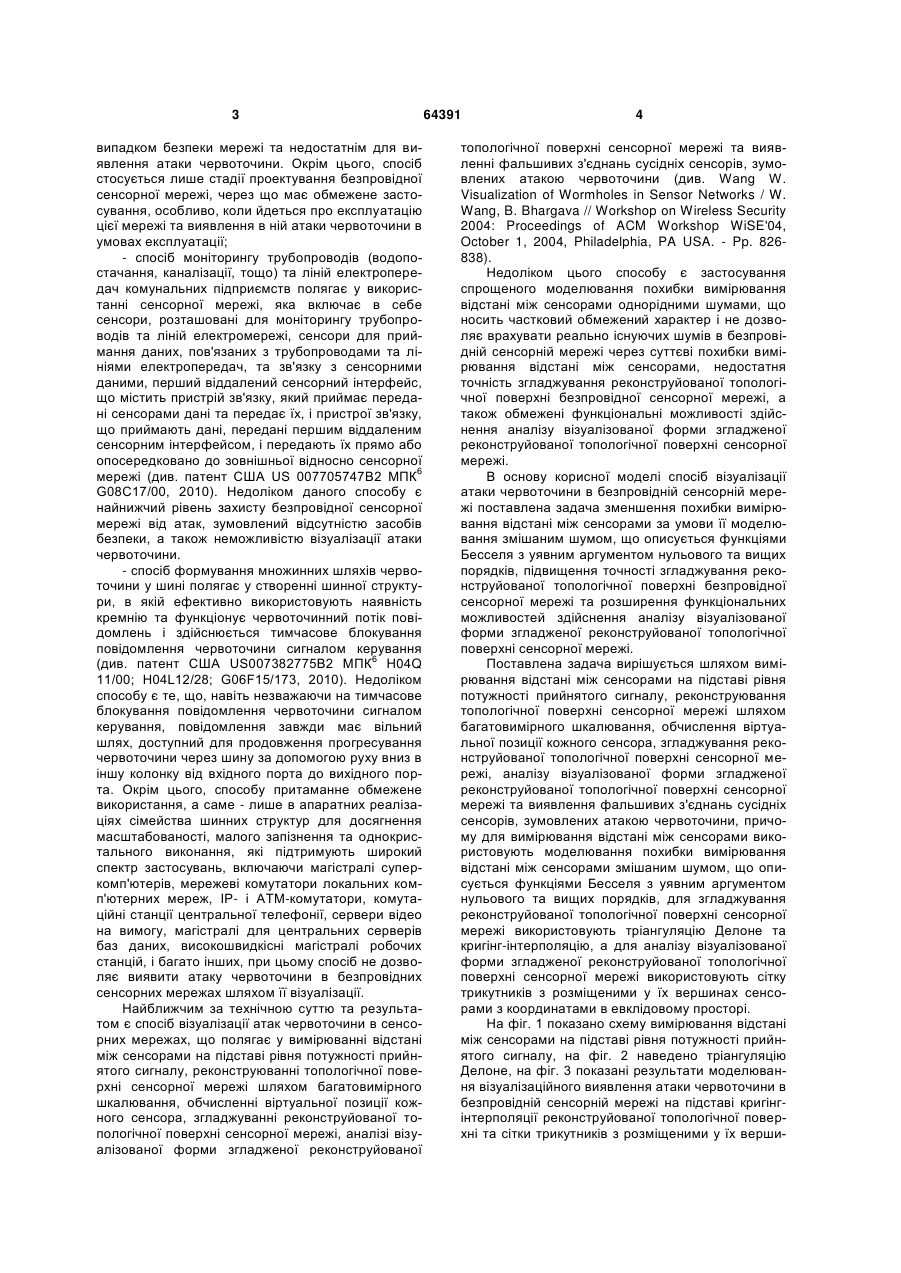
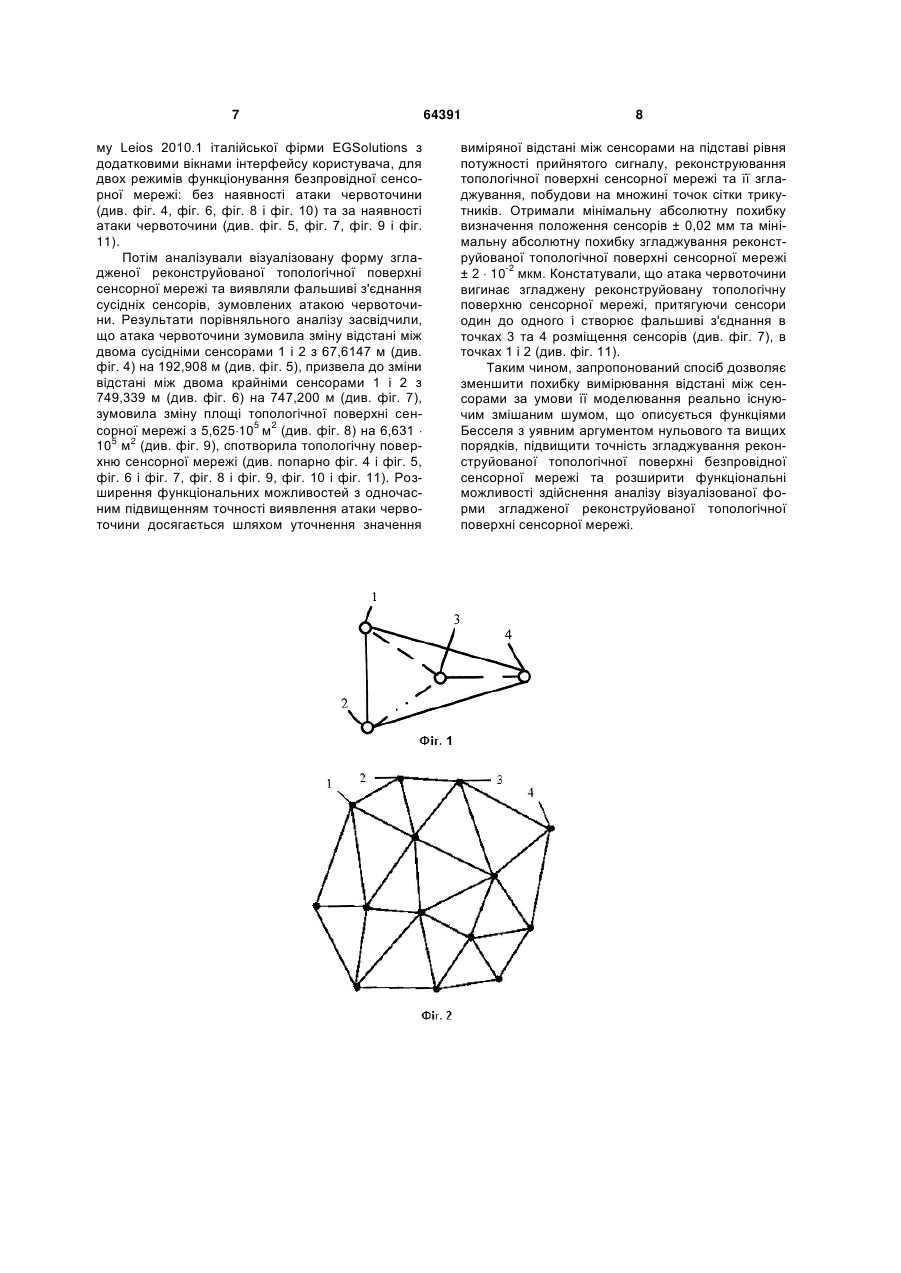
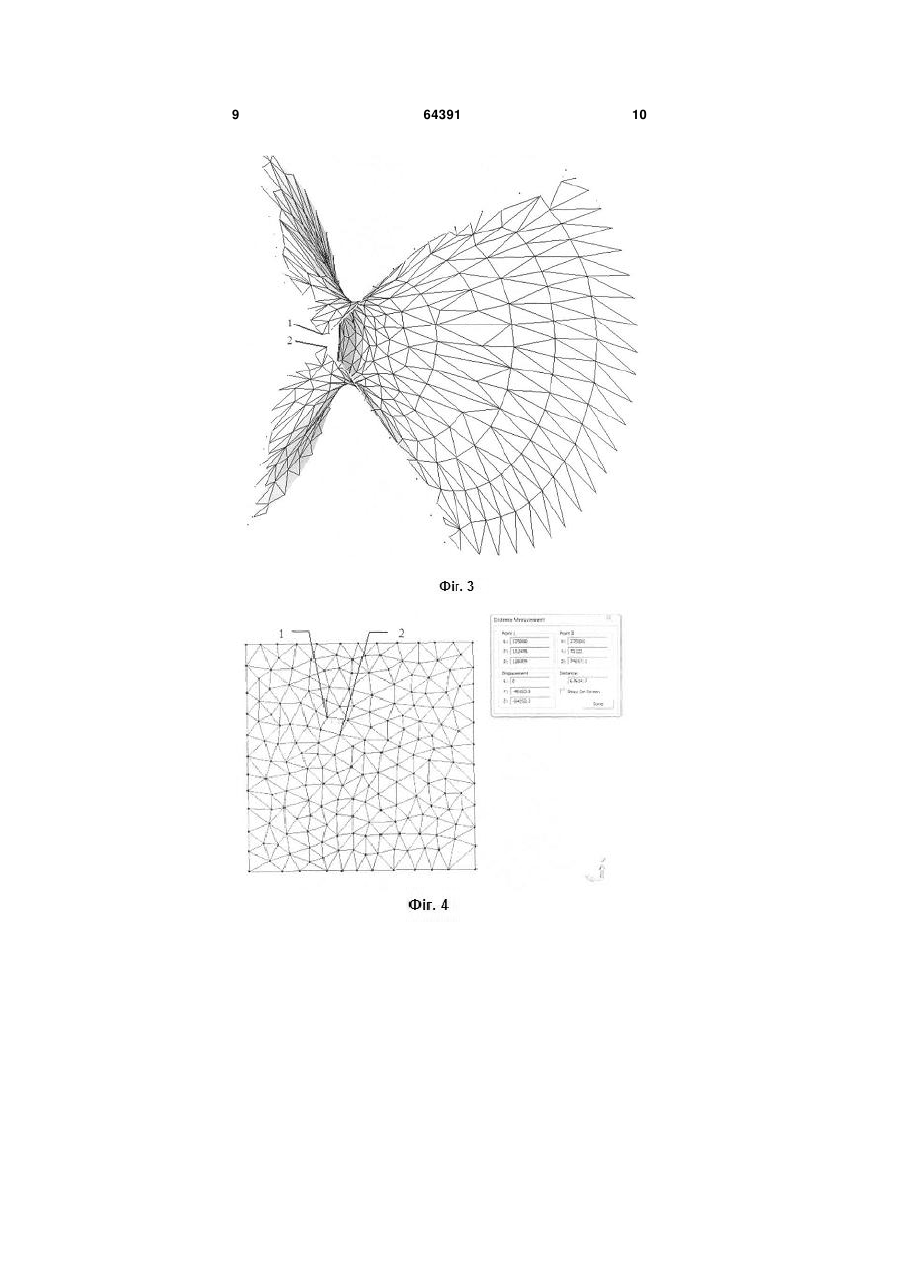
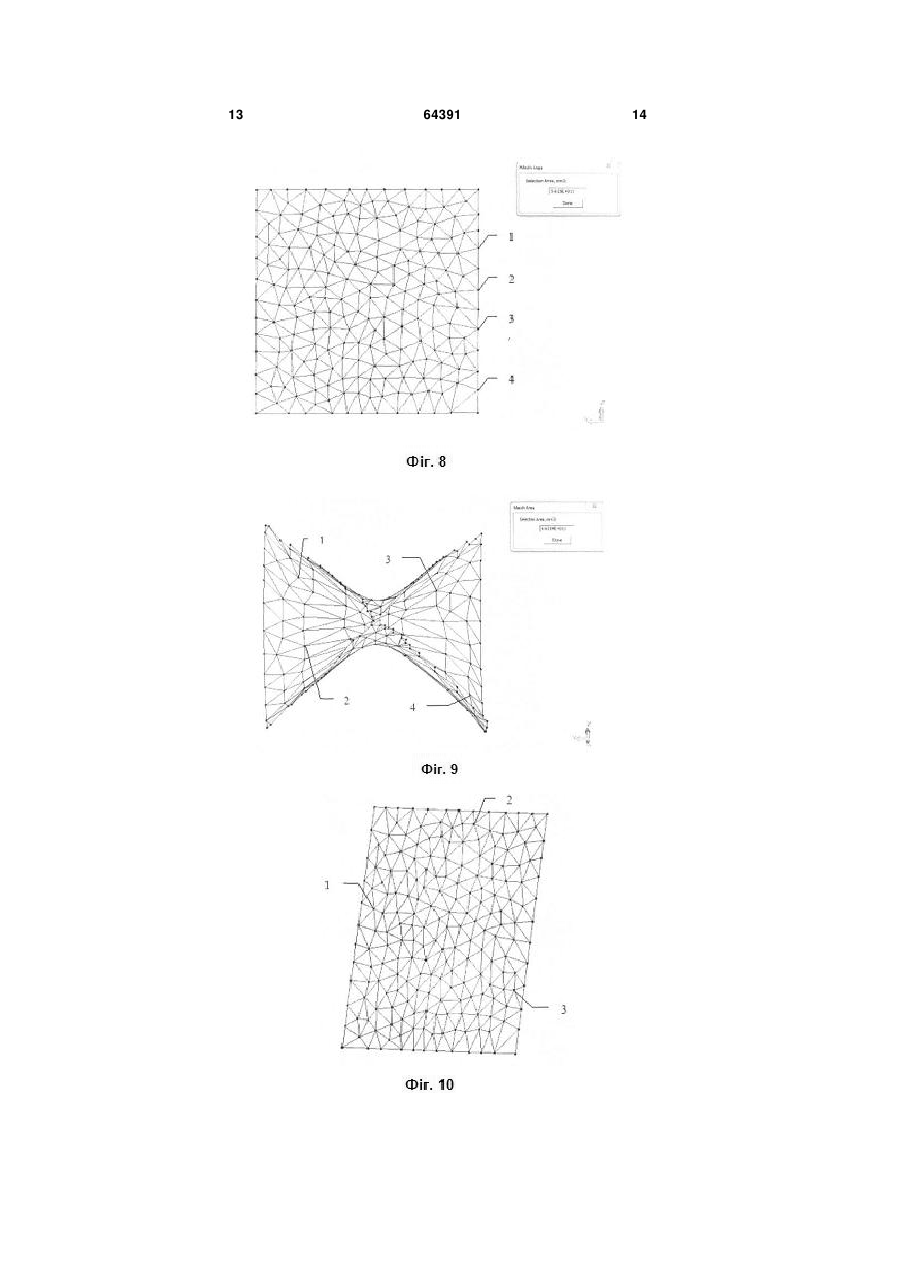
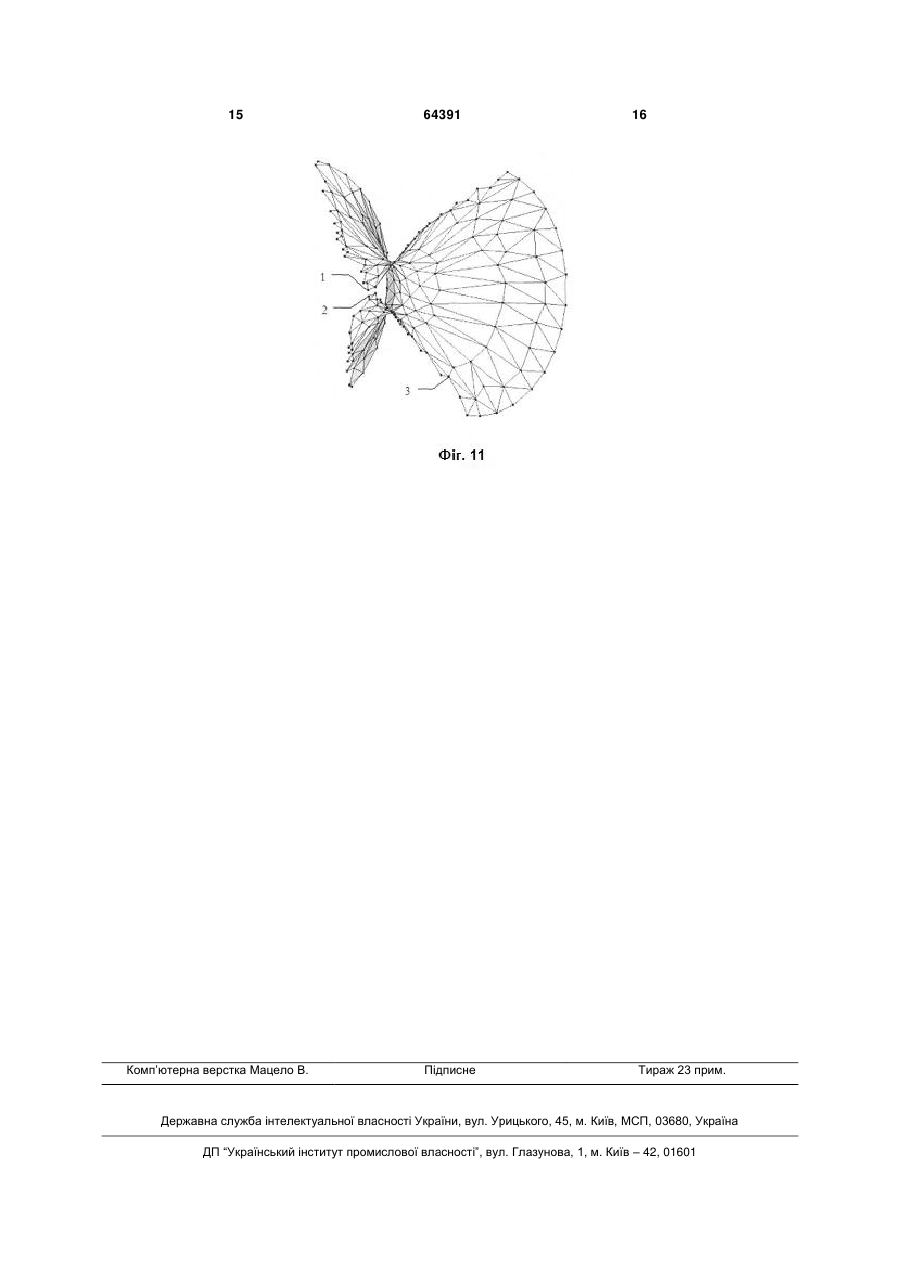
Спосіб візуалізації атаки червоточини в безпровідній сенсорній мережі, що полягає у вимірюванні відстані між сенсорами на підставі рівня потужності прийнятого сигналу, реконструюванні топологічної поверхні сенсорної мережі шляхом багатовимірного шкалювання, обчисленні віртуальної позиції кожного сенсора, згладжуванні реконструйованої топологічної поверхні сенсорної ме 3 випадком безпеки мережі та недостатнім для виявлення атаки червоточини. Окрім цього, спосіб стосується лише стадії проектування безпровідної сенсорної мережі, через що має обмежене застосування, особливо, коли йдеться про експлуатацію цієї мережі та виявлення в ній атаки червоточини в умовах експлуатації; - спосіб моніторингу трубопроводів (водопостачання, каналізації, тощо) та ліній електропередач комунальних підприємств полягає у використанні сенсорної мережі, яка включає в себе сенсори, розташовані для моніторингу трубопроводів та ліній електромережі, сенсори для приймання даних, пов'язаних з трубопроводами та лініями електропередач, та зв'язку з сенсорними даними, перший віддалений сенсорний інтерфейс, що містить пристрій зв'язку, який приймає передані сенсорами дані та передає їх, і пристрої зв'язку, що приймають дані, передані першим віддаленим сенсорним інтерфейсом, і передають їх прямо або опосередковано до зовнішньої відносно сенсорної 6 мережі (див. патент США US 007705747B2 МПК G08C17/00, 2010). Недоліком даного способу є найнижчий рівень захисту безпровідної сенсорної мережі від атак, зумовлений відсутністю засобів безпеки, а також неможливістю візуалізації атаки червоточини. - спосіб формування множинних шляхів червоточини у шині полягає у створенні шинної структури, в якій ефективно використовують наявність кремнію та функціонує червоточинний потік повідомлень і здійснюється тимчасове блокування повідомлення червоточини сигналом керування 6 (див. патент США US007382775B2 МПК H04Q 11/00; H04L12/28; G06F15/173, 2010). Недоліком способу є те, що, навіть незважаючи на тимчасове блокування повідомлення червоточини сигналом керування, повідомлення завжди має вільний шлях, доступний для продовження прогресування червоточини через шину за допомогою руху вниз в іншу колонку від вхідного порта до вихідного порта. Окрім цього, способу притаманне обмежене використання, а саме - лише в апаратних реалізаціях сімейства шинних структур для досягнення масштабованості, малого запізнення та однокристального виконання, які підтримують широкий спектр застосувань, включаючи магістралі суперкомп'ютерів, мережеві комутатори локальних комп'ютерних мереж, IP- і АТМ-комутатори, комутаційні станції центральної телефонії, сервери відео на вимогу, магістралі для центральних серверів баз даних, високошвидкісні магістралі робочих станцій, і багато інших, при цьому спосіб не дозволяє виявити атаку червоточини в безпровідних сенсорних мережах шляхом її візуалізації. Найближчим за технічною суттю та результатом є спосіб візуалізації атак червоточини в сенсорних мережах, що полягає у вимірюванні відстані між сенсорами на підставі рівня потужності прийнятого сигналу, реконструюванні топологічної поверхні сенсорної мережі шляхом багатовимірного шкалювання, обчисленні віртуальної позиції кожного сенсора, згладжуванні реконструйованої топологічної поверхні сенсорної мережі, аналізі візуалізованої форми згладженої реконструйованої 64391 4 топологічної поверхні сенсорної мережі та виявленні фальшивих з'єднань сусідніх сенсорів, зумовлених атакою червоточини (див. Wang W. Visualization of Wormholes in Sensor Networks / W. Wang, B. Bhargava // Workshop on Wireless Security 2004: Proceedings of ACM Workshop WiSE'04, October 1, 2004, Philadelphia, PA USA. - Pp. 826838). Недоліком цього способу є застосування спрощеного моделювання похибки вимірювання відстані між сенсорами однорідними шумами, що носить частковий обмежений характер і не дозволяє врахувати реально існуючих шумів в безпровідній сенсорній мережі через суттєві похибки вимірювання відстані між сенсорами, недостатня точність згладжування реконструйованої топологічної поверхні безпровідної сенсорної мережі, а також обмежені функціональні можливості здійснення аналізу візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі. В основу корисної моделі спосіб візуалізації атаки червоточини в безпровідній сенсорній мережі поставлена задача зменшення похибки вимірювання відстані між сенсорами за умови її моделювання змішаним шумом, що описується функціями Бесселя з уявним аргументом нульового та вищих порядків, підвищення точності згладжування реконструйованої топологічної поверхні безпровідної сенсорної мережі та розширення функціональних можливостей здійснення аналізу візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі. Поставлена задача вирішується шляхом вимірювання відстані між сенсорами на підставі рівня потужності прийнятого сигналу, реконструювання топологічної поверхні сенсорної мережі шляхом багатовимірного шкалювання, обчислення віртуальної позиції кожного сенсора, згладжування реконструйованої топологічної поверхні сенсорної мережі, аналізу візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі та виявлення фальшивих з'єднань сусідніх сенсорів, зумовлених атакою червоточини, причому для вимірювання відстані між сенсорами використовують моделювання похибки вимірювання відстані між сенсорами змішаним шумом, що описується функціями Бесселя з уявним аргументом нульового та вищих порядків, для згладжування реконструйованої топологічної поверхні сенсорної мережі використовують тріангуляцію Делоне та кригінг-інтерполяцію, а для аналізу візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі використовують сітку трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі. На фіг. 1 показано схему вимірювання відстані між сенсорами на підставі рівня потужності прийнятого сигналу, на фіг. 2 наведено тріангуляцію Делоне, на фіг. 3 показані результати моделювання візуалізаційного виявлення атаки червоточини в безпровідній сенсорній мережі на підставі кригінгінтерполяції реконструйованої топологічної поверхні та сітки трикутників з розміщеними у їх верши 5 нах сенсорами з координатами в евклідовому просторі. На фіг. 4 показана візуалізована форма згладженої реконструйованої топологічної поверхні сенсорної мережі із застосуванням сітки трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі, без наявності атаки червоточини. На фіг. 5 показана візуалізована форма згладженої реконструйованої топологічної поверхні сенсорної мережі, що й зображеної на фіг. 4, за наявності атаки червоточини. Позиціями 1 і 2 на фіг. 4 та фіг. 5 позначені точки, у яких розміщені сусідні сенсори. На фіг. 6 показана візуалізована форма згладженої реконструйованої топологічної поверхні сенсорної мережі із застосуванням сітки трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі, без наявності атаки червоточини. На фіг. 7 показана форма згладженої реконструйованої топологічної поверхні сенсорної мережі, що й зображеної на фіг. 6, за наявності атаки червоточини. Позиціями 1 і 2 на фіг. 6 та фіг. 7 позначені точки, у яких розміщені крайні сенсори. На фіг. 8 показана візуалізована форма згладженої реконструйованої топологічної поверхні сенсорної мережі із застосуванням сітки трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі, без наявності атаки червоточини. На фіг. 9 показана візуалізована форма згладженої реконструйованої топологічної поверхні сенсорної мережі, що й зображеної на фіг. 8, за наявності атаки червоточини. Позиціями 1, 2, 3 і 4 на фіг. 8 та фіг. 9 позначені точки, у яких розміщені сенсори. На фіг. 10 показаний вигляд збоку візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі із застосуванням сітки трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі, без наявності атаки червоточини. На фіг. 11 показаний вигляд збоку візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі, що й зображеної на фіг. 10, під впливом атаки червоточини. Позиціями 1, 2 і 3 на фіг. 10 та фіг. 11 позначені точки, у яких розміщені сенсори. Спосіб реалізується таким чином. Вимірюють відстань між сенсорами на підставі рівня потужності прийнятого сигналу (див. фіг. 1). Позиціями на фіг. 1 позначені: 1, 2, 3, 4 - сенсори безпровідної сенсорної мережі. Потім моделюють похибку вимірювання відстані між сенсорами змішаним шумом, що описується функціями Бесселя з уявним аргументом нульового та вищих порядків, та уточнюють значення виміряної відстані між сенсорами на підставі рівня потужності прийнятого сигналу. Надалі реконструюють топологічну поверхню сенсорної мережі шляхом багатовимірного шкалювання та обчислюють віртуальну позицію кожного сенсора. Далі згладжують реконструйовану топологічну поверхню сенсорної мережі. При цьому спочатку здійснюють тріангуляцію Делоне (див. фіг. 2). Вершинами трикутників на позиціях 1, 2, 3, 4 позначені сенсори безпровідної сенсорної мережі (див. 64391 6 фіг. 2). В подальшому здійснюють кригінгінтерполяцію реконструйованої топологічної поверхні та аналіз візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі використовують сітку трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі (див. фіг. 3). Потім аналізують форму згладженої реконструйованої топологічної поверхні сенсорної мережі та виявляють фальшиві з'єднання сусідніх сенсорів, зумовлених атакою червоточини. Констатують, що атака червоточини вигинає згладжену реконструйовану топологічну поверхню сенсорної мережі, притягуючи сенсори один до одного, і створює фальшиві з'єднання в точках 1 та 2 розміщення сенсорів (див. фіг. 3). Приклад конкретної реалізації способу візуалізації атаки червоточини в безпровідній сенсорній мережі. Безпровідну сенсорну мережу побудували на сенсорах, які сформували на модулях ХВее виробництва фірми США Digi International шляхом програмування стеку ХВее на програмному рівні. Сенсори функціонували в рамках протоколу ZigBee згідно зі стандартом IEEE 802.15.4. Вбудованою програмою застосували ZB20, базовану на специфікації ZigBee PRO Feature Set. Безпровідну сенсорну мережу сформували на 201 сенсорах із зінтегрованими антенами та розмістили у просторі. Поверхня, якою охопили дану безпровідну сенсорну мережу, має розміри: 750 м по осі аплікат та 750 м по осі ординат. Безпровідну сенсорну мережу вводили в два режими функціонування: без наявності атаки червоточини та за наявності атаки червоточини для температури довкілля в межах від +5 °С до +30 °С і вологості від 30 % до 70 %. Вимірювали відстані між сенсорами на підставі рівня потужності прийнятого сигналу, здійснювали моделювання похибки вимірювання відстані між сенсорами змішаним шумом, що описували функціями Бесселя з уявним аргументом нульового та вищих порядків, та уточнювали значення виміряної відстані між сенсорами на підставі рівня потужності прийнятого сигналу. Для цього запрограмували модулі ХВее з повним набором функцій. Модулі використовували запрограмований рівень стеку ХВее. При цьому потужність прийнятого сигналу вимірювали за допомогою заімплементованої програми на підставі 10-бітового аналогоцифрового перетворювача. Сенсори використовували також фізичний підрівень ZigBee PHY та підрівень керування доступом до радіоканалу МАС для неліцензійного діапазону частоти 2,4 Ггц. В подальшому здійснювали реконструювання топологічної поверхні сенсорної мережі шляхом багатовимірного шкалювання та обчислювали віртуальну позицію кожного сенсора за допомогою авторської програми, написаної на мові програмування С. Потім згладжували реконструйовану топологічну поверхню сенсорної мережі із застосуванням тріангуляції Делоне та кригінг-інтерполяції реконструйованої топологічної поверхні, використовуючи сітки трикутників з розміщеними у їх вершинах сенсорами з координатами в евклідовому просторі, застосовуючи для цього модернізовану програ 7 му Leios 2010.1 італійської фірми EGSolutions з додатковими вікнами інтерфейсу користувача, для двох режимів функціонування безпровідної сенсорної мережі: без наявності атаки червоточини (див. фіг. 4, фіг. 6, фіг. 8 і фіг. 10) та за наявності атаки червоточини (див. фіг. 5, фіг. 7, фіг. 9 і фіг. 11). Потім аналізували візуалізовану форму згладженої реконструйованої топологічної поверхні сенсорної мережі та виявляли фальшиві з'єднання сусідніх сенсорів, зумовлених атакою червоточини. Результати порівняльного аналізу засвідчили, що атака червоточини зумовила зміну відстані між двома сусідніми сенсорами 1 і 2 з 67,6147 м (див. фіг. 4) на 192,908 м (див. фіг. 5), призвела до зміни відстані між двома крайніми сенсорами 1 і 2 з 749,339 м (див. фіг. 6) на 747,200 м (див. фіг. 7), зумовила зміну площі топологічної поверхні сен5 2 сорної мережі з 5,62510 м (див. фіг. 8) на 6,631 5 2 10 м (див. фіг. 9), спотворила топологічну поверхню сенсорної мережі (див. попарно фіг. 4 і фіг. 5, фіг. 6 і фіг. 7, фіг. 8 і фіг. 9, фіг. 10 і фіг. 11). Розширення функціональних можливостей з одночасним підвищенням точності виявлення атаки червоточини досягається шляхом уточнення значення 64391 8 виміряної відстані між сенсорами на підставі рівня потужності прийнятого сигналу, реконструювання топологічної поверхні сенсорної мережі та її згладжування, побудови на множині точок сітки трикутників. Отримали мінімальну абсолютну похибку визначення положення сенсорів ± 0,02 мм та мінімальну абсолютну похибку згладжування реконструйованої топологічної поверхні сенсорної мережі -2 ± 2 10 мкм. Констатували, що атака червоточини вигинає згладжену реконструйовану топологічну поверхню сенсорної мережі, притягуючи сенсори один до одного і створює фальшиві з'єднання в точках 3 та 4 розміщення сенсорів (див. фіг. 7), в точках 1 і 2 (див. фіг. 11). Таким чином, запропонований спосіб дозволяє зменшити похибку вимірювання відстані між сенсорами за умови її моделювання реально існуючим змішаним шумом, що описується функціями Бесселя з уявним аргументом нульового та вищих порядків, підвищити точність згладжування реконструйованої топологічної поверхні безпровідної сенсорної мережі та розширити функціональні можливості здійснення аналізу візуалізованої форми згладженої реконструйованої топологічної поверхні сенсорної мережі. 9 64391 10 11 64391 12 13 64391 14 15 Комп’ютерна верстка Мацело В. 64391 Підписне 16 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for visualization of wormhole in a wireless sensor network
Автори англійськоюKarpinskyi Volodymyr Mykolaiovyh, Yevtukh Petro Sylverstrovych, Borovik Bohdan Leonovych, Karpinskyi Mykola Petrovych
Назва патенту російськоюСпособ визуализации атаки червоточины в беспроводной сенсорной сети
Автори російськоюКарпинский Владимир Николаевич, Евтух Петр Сильвестрович, Боровик Богдан Леонович, Карпинский Николай Петрович
МПК / Мітки
МПК: H04W 12/00
Мітки: атаки, безпровідній, мережі, сенсорний, спосіб, візуалізації, червоточини
Код посилання
<a href="https://ua.patents.su/8-64391-sposib-vizualizaci-ataki-chervotochini-v-bezprovidnijj-sensornijj-merezhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб візуалізації атаки червоточини в безпровідній сенсорній мережі</a>
Спосіб оптимізації маршруту для передачі інформації в безпровідній мережі
Номер патенту: 28694
Опубліковано: 25.12.2007
Автори: Канцевіч Богдан Юрійович, Філіпенков Костянтин Олегович
МПК: H04B 7/00, H04L 12/28
Мітки: оптимізації, мережі, інформації, передачі, безпровідній, спосіб, маршруту
Формула / Реферат:
Спосіб оптимізації маршруту для передачі інформації в безпровідній мережі, що складається з множини приймально-передавальних пристроїв, здатних здійснювати зв'язок безпосередньо один з одним, та включає визначення якості зв'язку між усіма приймально-передавальними пристроями згаданої мережі, запис кожним з приймально-передавальних пристроїв отриманих даних про якість зв'язку між усіма приймально-передавальними пристроями мережі, занесення...
Спосіб обслуговування пакетних даних у безпровідній мережі, мобільна станція та власне безпровідна мережа
Номер патенту: 75120
Опубліковано: 15.03.2006
Автори: Аброл Нішал, Ліой Марчелло
МПК: H04L 12/56, H04L 29/06, H04L 12/28
Мітки: безпровідна, станція, мережа, мобільна, даних, мережі, власне, спосіб, обслуговування, безпровідній, пакетних
Формула / Реферат:
1. Спосіб обслуговування пакетних даних, який включає:- встановлення однорівневого міжвузлового Інтернет-протоколу (РРР) (102, 110 або 210) для взаємодії численних додатків з даними між мобільною станцією і безпровідною мережею зв'язку (412);- передачу і прийом даних через вказаний однорівневий РРР (102, 110 або 210) з використанням першого рівня Протоколу радіолінії (RLP) (106, 118 або 218), який характеризується класом...
Спосіб і пристрій для відслідковування підрахунку одержувачів мовного контенту у безпровідній телефонній мережі
Номер патенту: 91492
Опубліковано: 10.08.2010
Автори: Касачія Лоренцо, Гріллі Франческо
МПК: H04W 8/00
Мітки: мережі, відслідковування, одержувачів, телефонний, контенту, спосіб, мовного, підрахунку, безпровідній, пристрій
Формула / Реферат:
1. Спосіб підрахунку безпровідних мобільних станцій, що приймають мовний контент від базової станції у мережі безпровідного зв'язку, який відрізняється тим, що базова станція здійснює безпровідне мовлення повідомлення, що повторюється, параметрів мовлення, яке включає в себе ідентифікацію щонайменше одного потоку мовного контенту і, у зв'язку з кожним потоком мовного контенту, індикатор, що має значення REGISTER або DO NOT...
Спосіб та базова станція для початку загальної або індивідуальної передачі широкомовного контента в безпровідній телефонній мережі (варіанти)
Номер патенту: 86357
Опубліковано: 27.04.2009
Автори: Чен Тао, Сіннараджах Рагулан, Хсу Реймонд Т., Ван Цзюнь
МПК: H04L 12/56, H04W 4/06
Мітки: станція, індивідуальної, контента, спосіб, телефонний, безпровідній, варіанти, загальної, мережі, передачі, широкомовного, початку, базова
Формула / Реферат:
1. Спосіб передачі широкомовних програм у безпровідній комунікаційній мережі, який включає операції:прийому базовою станцією декількох широкомовних програм від сервера контента;виконання даною абонентською станцією операцій з оцінки для визначення, чи доступна необхідна широкомовна програма від базової станції;відповідно до результатів операцій з оцінки дана абонентська станція виконує операції, які включають в себе одну...
Спосіб та пристрій для перемикання між загальними та індивідуальними каналами для забезпечення послуг передачі широкомовного контенту в безпровідній телефонній мережі
Номер патенту: 86189
Опубліковано: 10.04.2009
Автори: Ванг Цзунь, Сіннараджах Рагулан, Чен Тао
МПК: H04W 4/06
Мітки: індивідуальними, забезпечення, каналами, пристрій, мережі, телефонний, загальними, контенту, спосіб, широкомовного, безпровідній, передачі, перемикання, послуг
Формула / Реферат:
1. Спосіб роботи базової станції в безпровідній комунікаційній мережі, яка виконується даною базовою станцією і яка містить операції:надають широкомовний контент, що містить щонайменше одну широкомовну програму, одній або декільком безпровідним абонентським станціям по одному або декількох комунікаційних каналах, кожний з якихналежить одному з наступних типів: загальний канал для використання множиною абонентських станцій,...
Попередній патент: Стрічка для кругового пломбування “mehran bio lent”
Наступний патент: Пристрій для очищення стрічки конвеєра
Випадковий патент: Спосіб ушивання відкритої кукси дванадцятипалої кишки при низько розміщеній пнентруючій дуоденальній виразці